В этом видео уроке будем собирать электрофорную машину, которая представляет из себя генератор статического электричества. В начале рассматриваются общие вопросы по назначению и конструкции этой машины, потом подробно показаны все шаги по ее изготовлению своими руками.
Посмотрите на выбор ручных генераторов в этом китайском магазине.
Устройство состоит из основания, на котором крепятся ее детали. Также в ее состав входят две стойки с осями, на которых крепятся два диска с металлизированным покрытием. Имеются также две лейденские банки, которые являются, по сути, конденсаторами или накопителями заряженных частиц. Разрядники, которые функционируют по мере накопления заряда конденсаторов, съемники заряженных частиц с передней и с задней стороны дисков. Диски приводятся в движение при помощи ременной передачи. Мы крутим ручку и за счет этого происходит вращение дисков.
Первые генераторы статического электричества были одновременно изобретены в Германии в одно и то же время Августом Теплером и, независимо от него, Вильгельмом Гольцем. Принцип работы электрофорной машины. Поскольку диски вращаются относительно друг друга в противоположные стороны, они создают положительные и отрицательные заряды. При вращении дисков по мере накопления зарядов происходит разряд.
Авторы видео решили изготовить данную машину, которую можно повторить своими руками в обычных домашних условиях. На сайтах в интернете есть несколько примеров создания такого генератора, но данная конструкция будет иметь двигатель.
Сначала были сделаны чертежи будущей машины. В первую очередь были рассчитаны параметры диска. После проделанной предварительной работы приступили к созданию устройства.
Машина будет состоять из следующих элементов. Это 2 диска, которые будут вращаться в противоположные стороны, они будут сделаны из CD-дисков. Два двигатель от компьютерного кулера, которые будут приводить их в движение. Диск будет приклеен двухсторонним скотчем на ротор мотора. Сам двигатель крепится к стойке. Стойки будут сделаны из оргстекла. Также будут использованы лейденские банки. Это пустая металлическая емкость, от которой идет один контакт, далее полистироловый диэлектрик и латунный контакт.

Для начала нужно снять покрытие с диска, чтобы получить прозрачную заготовку. Для этого используем канцелярский нож. Для создания рабочего диска нужны эскизы, они выполнены на компьютере. Шаблон лепестка можно изготовить из подходящего материала, для этого хорошо подойдет банковская карта.
Теперь, используя шаблон, приступаем к разметке на скотче. Прикладываем шаблон и вырезаем все нужные фрагменты. Всего было вырезано 20 лепестков на один диск. Должно получиться 20 секций . Угол между двумя лепестками составляет 18 градусов. Разметка производится при помощи обычного листа в клеточку и транспортира. Теперь накладываем диск точно в середину координат, при помощи ножа или шила делаем насечки по 18 градусов. Наклеиваем лепестки в соответствии с линиями. В точной аналогии с первым диском был сделан второй диск. Он был обработан, чтобы обеспечить зазор.
У мотора удаляем желтый провод. Отсекаем ребра жесткости, чтобы можно было отсоединить двигатель. Некоторое место нужно оставить под монтажные отверстия.
izobreteniya.net
Cтраница 1
Статическая характеристика двигателя (2.1) получена в предположении, что переходные электромагнитные процессы в якорной цепи и цепи возбуждения полностью затухли. [2]
АВМ статической характеристики двигателя позволяет оценить влияние на динамику машинного агрегата электромагнитных переходных процессов. [4]
Под статической характеристикой двигателя понимают зависимость его крутящего момента от количества подаваемого топлива или смеси. Ее определяют опытным путем или используют характеристики для двигателей такого же типа. [5]
Требуется построить статические характеристики двигателя, работающего в заданной САУ. [6]
Для построения статических характеристик двигателя и схеме поддержания постоянства тока ротора импульсным методом ( рис. 2 - 1) необходимо показать, что такой способ эквивалентен регулированию скорости плавным изменением активного сопротивления в роторной цепи. [7]
Ставится задача построения статических характеристик двигателя, работающего в заданной САР. Статические характеристики должны иметь максимальную жесткость и располагаться в диапазоне от 0 1ян до пн. [8]
В данном случае рассматривается статическая характеристика двигателя. При более полном учете электромагнитных характеристик электродвигателя и представлении его как динамического объекта в систему ( 27) необходимо ввести известные дифференциальные уравнения, описывающие взаимосвязь электрических и магнитных параметров двигателя соответствующего типа. [9]
На рис. 3.44 при ведены статические характеристики двигателей механизма поворота. Характеристики двигателя перемещения незначительно отличаются лишь стопорными значениями тока. Режим работы генератора определяется положением переключателя ПР ( см. рие. Для питания двигателей вращения переключатель ставится в позицию Вращение. Если при этом контакт выключателя тормоза механизма вращения ВТ замкнут, срабатывает контактор вращения KB и подключает двигатели Ml и М2 к генератору. Напряжение генератора, соответствующее режиму поворота, устанавливается шунтированием части добавоч-ного 7езисТ0Ра R12 контактом переключателя ПР. [10]
Прежде чем перейти к такой линеаризации, рассмотрим статические характеристики двигателя и влияние параметров на их форму. [11]
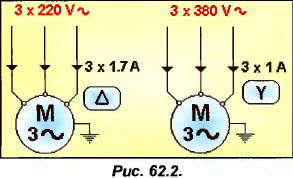
Причиной неравномерной нагрузки двигателей обычно является незначительное отличие механических статических характеристик двигателей. На рис. 4.1. представлены механические характеристики двух одинаковых асинхронных двигателей при питании их от сети. [13]
При исследовании динамики манипуляторов в большом необходимо учитывать нелинейность статической характеристики двигателя - насыщение по ип и ол, которые ограничивают быстродействие привода. [14]
Здесь Мд ( и, q, q) - статическая характеристика двигателя, являющаяся в общем случае периодической функцией q с периодом 2шд, где гя - передаточное отношение механизма, связывающего главный вал двигателя с его выходным валом. [15]
Страницы: 1 2 3
www.ngpedia.ru
Вес груза и грузозахватного устройства
 кН.
кН.
Коэффициент полезного действия передачи:

 - КПД передачи при поднятии и опускании грузозахватного устройства. При
- КПД передачи при поднятии и опускании грузозахватного устройства. При 
 =0,3.
=0,3.
Подъем с грузом:
 Нм.
Нм.
Опускание с грузом:
 Нм.
Нм.
Подъем без груза:
 Нм.
Нм.
Опускание без груза
 Нм.
Нм.
Определяем статический, среднеквадратический (эквивалентный) момент:

Предварительный выбор мощности электродвигателя производится по статическому среднеквадратичному (эквивалентному) моменту, с учетом коэффициента запаса Кз, который учитывает неизвестную на этапе предварительных расчетов динамическую составляющую нагрузки.
Кз=(1,11,5). Принимаем Кз=1,3.
 Нм.
Нм.
Действительная продолжительность включения:
 %.
%.
Требуемая номинальная скорость двигателя:
 об/мин
об/мин
 рад/мин.
рад/мин.
Эквивалентная расчетная мощность двигателя:
 кВт.
кВт.
Пересчитанная на стандартную продолжительность включения мощность:
 кВт.
кВт.
По рассчитанной скорости вращения и номинальной мощности с учетов принятой системы электропривода предварительно принимаем двигатель типа 4МТН355L10.
Параметры выбранного двигателя:
| Pн | nн | Uрот | Iрот | | cos | r1 | x1 | x2/ | JP | MK | I0 |
| кВт | об/мин | В | А | а | - | Ом | Ом | Ом | Ом | Нм | А |
| 160 | 586 | 408 | 245 | 392 | 0,61 | 0,012 | 0,048 | 0,085 | 15 | 7310 | 247 |
Выбранный двигатель необходимо проверить по условиям нагрева и перегрузки. Для этого необходимо рассчитать и построить нагрузочную диаграмму привода.
Динамический момент зависит от момента инерции привода и его ускорения.
 ;
;
 ,
,
где  - угловое ускорение, 1/с2;
- угловое ускорение, 1/с2;
 - суммарный приведенный момент инерции для нагруженного и ненагруженного механизма, кгм2.
- суммарный приведенный момент инерции для нагруженного и ненагруженного механизма, кгм2.
 -момент инерции вращающихся передач, кгм2.
-момент инерции вращающихся передач, кгм2.
Массы поступательно движущихся частей:
 кг
кг
 кг.
кг.
Радиус приведения кинематической цепи между двигателем и исполнительным механизмом:
 м.
м.
Угловые ускорения:
 с-2
с-2
 с-2.
с-2.
Моменты инерции:
 кгм2
кгм2
 кгм2
кгм2
 кгм2.
кгм2.
Динамические моменты:
 Нм
Нм
 Нм.
Нм.
Моменты двигателя при пуске с грузом:
 Нм
Нм
 Нм.
Нм.
Моменты двигателя при торможении с грузом:
 Нм
Нм
 Нм.
Нм.
Моменты двигателя при пуске без груза:
 Нм
Нм
 Нм.
Нм.
Моменты двигателя при торможении без груза:
 Нм
Нм
 Нм.
Нм.
По рассчитанным моментам строим нагрузочную диаграмму электропривода.
Эквивалентный момент двигателя при ПВрасч=18,17%:

где =0,75 – коэффициент, учитывающий ухудшение охлаждения двигателя при пуске и торможении (для двигателей с само вентиляцией).
Приведем эквивалентный момент двигателя к стандартной ПВ=40%:
 Нм.
Нм.
Номинальный момент предварительно выбранного двигателя:
 Нм.
Нм.
Необходимое условие по нагреву Мн Мэкв.ствыполняется.
Перегрузочная способность двигателя
 , => Мк 0,81 > Мп1
, => Мк 0,81 > Мп1
73100,81=5921,1 => 5921,1 > 5646,977 - условие выполняется.
Окончательно принимаем двигатель 4МТН355L10.
| Pн | nн | Uрот | Iрот | | cos | r1 | x1 | x2/ | JP | MK | I0 |
| кВт | об/мин | В | А | а | - | Ом | Ом | Ом | Ом | Нм | А |
| 160 | 586 | 408 | 245 | 392 | 0,61 | 0.012 | 0.048 | 0,085 | 15 | 7310 | 247 |

Рисунок 2. Нагрузочные диаграммы

studfiles.net
Двигательный режим. Будем считать, что при нормальной схеме включения двигателя независимого возбуждения (pис. 1) напряжение U питающей сети постоянно и равно номинальному значению. Примем также, что при неизменном токе в обмотке возбуждения магнитный поток остается постоянным независимо от тока якоря, т. е. не будем учитывать реакцию якоря. Если ток возбуждения имеет номинальное значение, то для естественной электромеханической характеристики (рис. 1) можно записать
 . (9)
. (9)
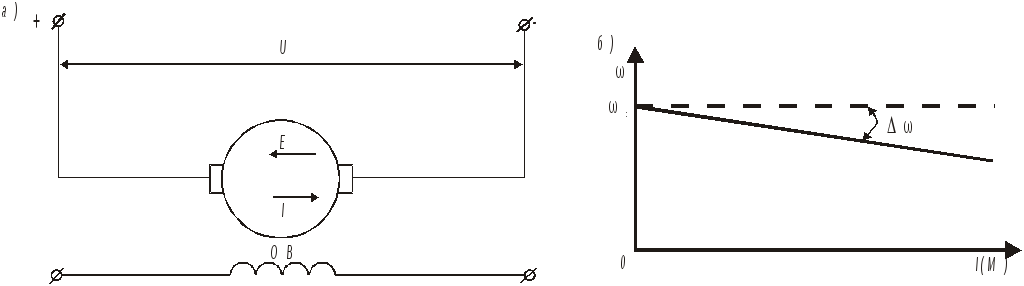
Рисунок 1. Схема включения и естественная характеристика двигателя
независимого возбуждения
Из выражения (9) видно, что при токе якоря, равном нулю, двигатель вращается со скоростью идеального холостого хода, зависящей только от напряжения на зажимах двигателя и от потока возбуждения:
 . (10)
. (10)
Из выражений (2) и (10) следует, что при данной скорости противо- э.д.с. двигателя равна приложенному напряжению, так как
Е = 0сФн =Uн.
С учетом (10) уравнение электромеханической характеристики (9) можно представить в следующем виде:
 . (11)
. (11)
Тогда согласно (6) выражение для механической характеристики будет
 . (12)
. (12)
Величины  для электромеханической и
для электромеханической и для механической характеристик представляют собой разность между скоростями
для механической характеристик представляют собой разность между скоростями
 . (13)
. (13)
Эта разность называется перепадом скорости и обозначается . Тогда для этих характеристик двигателя независимого возбуждения можно записать следующее общее выражение:
= 0 - . (14)
Так как перепад скорости прямо пропорционален моменту или току, то механическая и электромеханическая характеристики двигателя независимого возбуждения являются прямыми линиями и при соответствующих масштабах по току и моменту изображаются одной прямой (рис. 1, б).
Скорость идеального холостого хода можно определить из отношения
 , (15)
, (15)
где Uн, Iн, н – соответственно номинальные значения напряжения, тока и скорости двигателя, которые приводятся в каталогах. Тогда
 . (16)
. (16)
Зная скорость 0 и скорость н при номинальной нагрузке Мн, т. е. две точки прямой, можно построить естественную характеристику.
Искусственные характеристики могут быть получены изменением подводимого к двигателю напряжения или потока возбуждения, а реостатные – изменением сопротивления в цепи якоря.
Как видно из приведенных выше зависимостей, при изменении подводимого напряжения меняется только скорость 0, а перепад скорости остается неизменным, поэтому характеристики для различных напряжении будут параллельными (рис. 2).
При изменении потока возбуждения меняются, скорость идеального холостого хода 0 и перепад скорости .
При скорости, равной нулю, электромеханические характеристики (рис. 3) для различных потоков пересекаются в одной точке, соответствующей току короткого замыкания Iк, так как величина тока короткого замыкания Iк = Uн/Rя не зависит от потока возбуждения. Механические характеристики (рис. 3, б) общей точки пересечения не имеют, потому что момент короткого замыкания зависит от величины потока возбуждения Мк = сФIк.

Рисунок 2. Искусственные характеристики двигателя независимого
возбуждения для различных значений напряжении сети
Если включить в цепь якоря добавочное сопротивление, то двигатель будет работать на реостатной характеристике. При нагрузке, равной нулю, все реостатные характеристики имеют общую точку, равную скорости идеального холостого хода (рис. 4).

Рисунок 3. Искусственные характеристики двигателя для различных
величин потоков возбуждения
Выражение реостатной механической характеристики двигателя согласно (12) при номинальном моменте имеет вид
 , (17)
, (17)
где R = Rя + Rд, – полное сопротивление цепи якоря, равное сумме внутреннего и внешнего добавочного сопротивлений.
При номинальном токе неподвижного якоря сопротивление якорной цепи должно быть равно номинальному сопротивлению Rн. При этом двигатель развивает номинальный момент Мн, а перепад скорости = 0. Тогда в соответствии с (13):
 . (18)
. (18)

Рисунок 4. Естественная и реостатные характеристики двигателя
независимого возбуждения
Разделив (17) на (18), получим
 или = r (19)
или = r (19)
где = /0 относительный перепад скорости;
r = R/Rн – сопротивление якорной цепи в относительных единицах. Выразим правую и левую части равенства в процентах, тогда
% = R%. (20)
Таким образом, при номинальной нагрузке двигателя на сколько процентов изменится сопротивление при номинальном режиме, на столько же процентов изменится относительная скорость. Это свойство позволяет легко строить реостатные характеристики для любых сопротивлений цепи якоря.
Тормозные режимы. Двигатели независимого возбуждения имеют все три способа электрического торможения.
Рассмотрим условия получения этих режимов. Пусть на валу двигателя имеется барабан, на который намотан канат с подвешенными на нем грузами G1 и G2 (рис. 5). Предположим, что груз G1 больше груза G2 и происходит подъем груза G1. Тогда электрический двигатель преодолевает статический момент, созданный разностью грузов, и работает с моментом Мс и скоростью с в точке А своей механической характеристики.
При увеличении груза G2 статический момент на валу двигателя уменьшится, а скорость увеличится. При некотором грузе G2 момент на валу электродвигателя станет равным нулю, а скорость будет равна скорости идеального холостого хода 0 (точка В).
При дальнейшем увеличении груза G2 разность между грузами G1 и G2 будет отрицательной, статический момент M'c, изменит свой знак и начнет действовать в направлении вращения двигателя. Скорость двигателя 'с возрастет и превысит скорость холостого хода (точка С). В этом случае э.д.с. двигателя Е будет больше приложенного напряжения U. Ток меняет свое направление, что следует из уравнения (1), при R = Rя + Rд:
 ,
,
следовательно, изменит свой знак и момент, который будет теперь противодействовать движению, т. е. станет тормозным. Электрическая машина в этом случае будет работать генератором, преобразуя механическую энергию привода в электрическую и отдавая ее в сеть. Такой режим называется рекуперативным.


ё
ё
Рисунок 5. Установившиеся режимы работы двигателя:
А – двигательного; В – холостого хода; С – рекуперативного торможения; D, G – короткого замыкания; Е, F – противовключения
Скорость в точке В, расположенной на границе между двигательным и генераторным режимами, называют пограничной.
Уравнение электромеханической характеристики для рекуперативного режима с учетом изменившегося направления тока якоря имеет вид:
 , (21)
, (21)
а уравнение механической характеристики для этого режима
 . (22)
. (22)
Из полученных уравнений видно, что характеристики двигателя независимого возбуждения в рекуперативном режиме прямолинейны и при М = 0 проходят через точку пограничной скорости. Наклон характеристик определяется величиной сопротивления цепи якоря. Если эти сопротивления для двигательного и рекуперативного режимов равны, характеристики одного режима являются продолжением характеристик другого. Переход работы из одного режима в другой происходит автоматически.
Рекуперативный способ торможения является весьма экономичным, так как происходит отдача в сеть электрической энергии, преобразованной двигателем из механической, приложенной к его валу. Но это торможение может применяться при спуске груза со скоростью выше пограничной. Увеличение сопротивления в цепи якоря при неизменном моменте вызывает возрастание скорости двигателя в рекуперативном режиме (точка С1).
При увеличении груза G1 статический момент будет возрастать. Двигатель начнет уменьшать свою скорость и при некотором грузе G1 остановится (точка D), удерживая груз неподвижным (режим к.з.). При дальнейшем увеличении груза G1 статический момент окажется больше момента, развиваемого двигателем, вследствие этого груз G1 начнет опускаться, вращая двигатель в направлении, противоположном действию момента двигателя (точка Е). Поэтому момент, развиваемый двигателем, будет препятствовать движению привода. Следовательно, он станет тормозным. Такой режим называется противовключением.
Так как направление вращения изменилось на обратное, а направление потока возбуждения остается прежним, то э.д.с. меняет свой знак и будет совпадать с напряжением сети. Ток определится равенством
 . (23)
. (23)
Уравнение электромеханической характеристики для режима противовключения будет
 . (24)
. (24)
а уравнение механической характеристики
 . (25)
. (25)
Из этих уравнений следует, что характеристики в режиме противовключения прямолинейны и являются продолжением характеристик двигательного режима. С увеличением скорости ток и тормозной момент двигателя будут возрастать. Поэтому для ограничения тока и момента допустимыми значениями необходимо в цепь якоря включить дополнительное сопротивление.
Из выражения (23) следует
IяR = U + E.
Умножив левую и правую части на Iя получим
Iя2R = UIя + EIя.
где Iя2R – мощность, расходуемая на нагревание сопротивлений цепи якоря;
UIя – мощность, подводимая со стороны сети;
EIя – мощность, преобразованная из механической, подводимой со стороны вала.
Таким образом, при торможении противовключением двигатель работает не только в генераторном режиме, преобразуя механическую энергию в электрическую, но и потребляет электрическую энергию из сети. Вся эта энергия рассеивается в виде тепла в сопротивлениях цепи якоря. Этот режим может быть использован для остановки привода, работающего с полной скоростью. Для этого изменяют направление вращения двигателя и вводят в цепь якоря токоограничивающее сопротивление. Двигатель в этом случае имеет характеристику, соответствующую сопротивлению R2 (см. рис. 5), а в начале торможения со скоростью с работает в точке F. Так как знак момента М в этом случае изменяется, то под совместным действием его и груза начинается снижение скорости до нуля (точка G).
Если двигатель отключить от сети (он будет вращаться за счет запасенной кинетической энергии привода или энергии опускаемого груза), а обмотку якоря при этом замкнуть на сопротивление, то при наличии потока возбуждения двигатель будет работать генератором, преобразуя механическую энергию в электрическую и расходуя ее в замкнутом контуре, электрически не связанном с сетью. Такой режим работы электрической машины называют динамическим торможением.
Для создания магнитного потока обмотка возбуждения может оставаться включенной в сеть при динамическом торможении с независимым возбуждением (рис. 6, а) или подключаться на зажимы якоря при торможении с самовозбуждением (рис. 6, б).

Рисунок 6. Схемы включения и характеристики двигателя с независимым
возбуждением при динамическом торможении
В режиме динамического торможения ток в цепи якоря изменяет свое направление по сравнению с двигательным режимом. Величину его можно определить по формуле
Iя = –E / R.
Уравнение электромеханической характеристики для данного режима будет
 , (26)
, (26)
а уравнение механической характеристики
 . (27)
. (27)
При динамическом торможении двигателя с независимым возбуждением поток остается постоянным, поэтому тормозные характеристики (см. рис. 5, ДТНВ) представляют собой прямые, проходящие через начало координат, и наклон их к оси абсцисс определяется сопротивлением цепи якоря. Преимуществом динамического торможения с независимым возбуждением следует считать возможность получения большей плавности торможения. Недостатком этого вида торможения является то, что при исчезновении напряжения в сети исчезает магнитный поток и тормозной момент становится практически равным нулю. Во избежание этого применяют динамическое торможение с самовозбуждением. В этом случае обмотка возбуждения подключается на зажимы якоря параллельно с тормозным сопротивлением (рис. 6, б).
Сравнивая характеристики динамического торможения с самовозбуждением и независимым возбуждением (ДТСВ и ДТНВ на рис. 6, б), видим, что при одинаковой скорости тормозной эффект во втором случае больше, чем в первом. Поэтому для двигателей независимого возбуждения динамическое торможение с самовозбуждением применяется редко (только как аварийное).
studfiles.net
| Если необходимо подчеркнуть те или иные взаимосвязи между параметрами, справедливые для установившихся режимов, из всего многообразия взаимосвязей (6) выбирают лишь необходимые и на их основе строят статические характеристики двигателя. Если воспользоваться для этой цели поверхностью А (см. рис. 22), то соответствующие статические характеристики могут быть получены сечениями этой поверхности плоскостями В, С и D, параллельными соответствующим координатным плоскостям.
Проекции на плоскость (М; ?) сечений поверхности А плоскостями (В), параллельными координатной плоскости (М; со), дают на плоскости (М; ?) внешнюю 1 (при h0 = const) и частичную 2 скоростные характеристики двигателя: М = f (?) при h = const. Проекции сечений поверхности А плоскостями (D), параллельными координатной плоскости (h; ?), дают на плоскости (h; ?) регулировочные характеристики 3 и 4: h = f (?) при М = const, и, наконец, проекции сечения поверхности А плоскостями (С), параллельными координатной плоскости (М; h), дают на плоскости (М; h) нагрузочные характеристики 5 и 6; М = f (h) при ? = const. Все сказанное применительно к выбранным трем параметрам М, ? и h можно практически повторить, если выбрать любые другие три параметра. Таким образом, каждая точка любой статической характеристики, т. е. каждая точка, лежащая на поверхности А и определяемая функциональной зависимостью (6), соответствует только одному установившемуся режиму, а каждая статическая характеристика двигателя представляет собой последовательную совокупность установившихся режимов, выраженных определенными параметрами при определенных условиях (например, постоянство того или иного параметра).
Один установившийся режим определяется одной точкой любой статической характеристики, например точкой В, принадлежащей скоростной (рис. 23) или нагрузочной (рис. 24) характеристике дизеля. Этот режим соответствует определенным значениям параметров Мв; ?в; hв; geB; NeB. Все сказанное о статических характеристиках свидетельствует о том, что их применяют для определения тех или иных статических свойств двигателя. Каждая статическая характеристика иллюстрирует взаимосвязь параметров при установившихся режимах работы двигателя в определенных условиях. |
vdvizhke.ru
Cтраница 1
Статический преобразователь постоянного тока в многофазный, Авт. [1]
Статический преобразователь постоянного тока в переменный. [2]
Для статических преобразователей постоянного тока были разработаны два варианта автономных инверторов напряжения с частотой инвертирования 1000 гц. Первый вариант номинальной мощностью 1500 кет выполнен по нулевой схеме, приведенной на рис. V.25, а. Он состоит из управляемых вентилей В, В2, встречных диодов Д, Д2, колебательного контура коммутации тока LKCK, трансформа -, тора Тр, конденсаторов фильтра Сф и блока управления. В качестве управляемых вентилей в инверторе использованы тиристоры типа Т-150 8 кл, а в качестве встречных вентилей - полупроводниковые диоды типа ВЛ-200 6 кл. [3]
Режим частотного управления при работе двигателя со статическим преобразователем постоянного тока в несинусоидальный переменный представляет собой сочетание большого числа шаговых режимов. [5]
Вентильные двигатели с независимой коммутацией полупроводниковых преобразователей - это двигатели переменного тока с статическим преобразователем постоянного тока в переменный. Вентильные двигатели с полузависимой коммутацией полупроводниковых преобразователей - это двигатели переменного тока с преобразователем, частота на выходе которых может меняться в зависимости от угловой скорости вращения. [7]
В ряде случаев для упрощения схем испытания машин постоянного тока с возвратом энергии в сеть вместо механически связанных двигателя постоянного тока и синхронного генератора используют статический преобразователь постоянного тока в переменный требуемой частоты ( инвертор), вход которого подключен к генератору ГПТ, а выход - к сети. Регулирование мощности в этом случае осуществляется за счет изменения длительности проводящего состояния преобразователя. [9]
Работа трансформаторов при фиксированных повышенных частотах требует более тщательного учета явлений вытеснения тока в поверхностные слои проводника и связанных с этим эффектов поверхностного, кругового и эффекта близости. Мощные ВВ трансформаторы для статических преобразователей постоянного тока не отличаются по характеру своей работы и по конструкции от рассмотренных выше образцов. [10]
Для первой группы в ее состав входит еще и сеть переменного тока. В качестве аварийных источников питания предусматриваются аккумуляторные батареи и статические преобразователи постоянного тока в переменный, обеспечивающие потребителей первой группы. [12]
Для питания люминесцентного освещения, радиоаппаратуры, электробритв и других приборов нужен переменный электрический ток. В связи с этим на пассажирских вагонах устанавливают электромашинные или полупроводниковые статические преобразователи постоянного тока в переменный. [13]
Выполнение электропривода тиристор - двигатель постоянного тока наталкивается на трудности создания взрывозащищенного коллекторного электродвигателя. Машины постоянного тока во взрывозащищенном исполнении имеют большие габариты и вес, чем асинхронные двигатели с аналогичными параметрами, и обслуживание их затруднено неудобством проведения профилактических осмотров коллектора и щеточного аппарата. Поэтому, несмотря на то, что статические преобразователи частоты на мощности 50 - 300 кет при существующих параметрах кремниевых управляемых вентилей получаются более громоздкими и дорогими, чем статические преобразователи постоянного тока, создание частотно-регулируемого электропривода подземных машин и лебедок является весьма перспективной задачей. [14]
Страницы: 1
www.ngpedia.ru
Cтраница 3
Основываясь на результатах многочисленных расчетов станочных электромеханических устройств и результатах экспериментальных исследований ( стендовых и натурных), изложенных в работах [19, 23, 33, 35], можно утверждать, что разработанная методика достаточно полно отражает динамические процессы в машинном агрегате. Расчет, основанный на использовании статической характеристики двигателя, является ориентировочным и может служить лишь для оценки порядка величин. Это особенно важно для машинных агрегатов с асинхронными короткозамкну-тыми двигателями нормального скольжения при небольших маховых массах. [31]
Для более полного анализа условий работы машин и оценки правильности выбора двигателя необходимо исследовать не только установившееся движение, но и процесс пуска машины с учетом характеристики двигателя. В первом приближении в расчетах обычно учитывается статическая характеристика двигателя [1], отражающая зависимость движущего момента от угловой скорости ротора двигателя при установившемся движении. [32]
Уравнение связывает в единое целое параметры машины и двигателя, причем конкретный вид функции Мд задается механической характеристикой двигателя. Из выражения ( 8) видно, что при использовании статической характеристики двигателя в виде ( 1) или ( 2) движение машины будет описывается одним уравнением, а при использовании динамической характеристики в виде ( 6) или ( 7) - системой двух уравнений. Кроме того, следует отметить, что статическая характеристика задается явной алгебраической зависимостью движущего момента от величины скольжения или скорости, тогда как динамическая характеристика определяется дифференциальным уравнением и зависимость движущего момента от скорости может быть найдена только после решения соответствующих уравнений движения машинного агрегата. [33]
На первой осциллограмме колебания момента двигателя во время пуска особенно значительны. При пуске включением роторной цепи ( рис. 4 - 4 6) колебания момента двигателя несколько меньше, однако и в этом случае процесс разгона двигателя будет происходить далеко не по статической характеристике двигателя. [35]
Практически единственным эффективным способом регилирования частоты враще ния асинхронного двигателя является частотное регулирование - изменение частоты тока / 0 - Но изменение / о обязательно должно сопровождаться изменением напряжения электроснабжения, определяемого некоторым дополнительным условием. В этом случае при постоянном моменте нагрузки напряжение должно меняться пропорционально частоте / Q электрического поля. На рис. 9.4.1 штриховыми линиями показано несколько статических характеристик двигателя, полученных в результате уменьшения / Q с учетом отмеченного выше условия изменения напряжения электроснабжения. [36]
Первый член уравнения ( 431) представляет статическую пусковую характеристику двигателя. Второй член уравнения учитывает влияние электромагнитных переходных процессов двигателя при пуске. Влияние второго члена на работу электроприводов в период пуска довольно значительно. Однако, ввиду сложности вопроса действием второго члена уравнения ( 431) часто пренебрегают и для ориентировочных расчетов пользуются только статической характеристикой двигателя. [37]
Перенося полученные точки пересечения этих характеристик с характеристикой автоматического регулятора в систему координат ( / И, / г), получим искомую статическую характеристику. Для получения статических характеристик при различных значениях управляющего воздействия необходимо построить семейство характеристик автоматического регулятора при выбранных значениях управляющего воздействия ( на фиг. Например, может быть проведен расчет системы автоматического регулирования числа оборотов электродвигателя постоянного тока ( фиг. По точкам пересечения этих характеристик построены две статические характеристики системы для двух значений Si и S2 напряжения, снимаемого с потенциометра. Как видно из сравнения, полученных статических характеристик системы со статической характеристикой двигателя, построенной для постоянного напряжения и ( пунктирная кривая), первые имеют значительно большую жесткость, чем вторая. Однако при другом угле наклона характеристик регулятора ( при угле наклона положительном, но большем, чем у характеристик двигателя) могут быть получены характеристики системы автоматического регулирования более мягкие, чем характеристики двигателя. [38]
Эта блок-схема составлена для сокращения количества чертежей. Она представляет двенадцать возможных комбинаций обратных связей. Действительно, обратная связь по напряжению двигателя бывает положительной, как, например, в ЭМУ с самовозбуждением ( см. § 2 - 6), и отрицательной, как это было в предыдущем параграфе. Обратная связь по току может быть также положительной, как, например, в предыдущем параграфе, или отрицательной, применяемой иногда для улучшения качества переходных процессов или для снижения жесткости статических характеристик двигателя. Поэтому знаки плюс и минус поставлены также перед сигналом р / г. Наконец, обратная связь по скорости обычно является отрицательной, и поэтому перед сигналом уО, поставлен только отрицательный знак. [39]
Эта блок-схема составлена для сокращения количества чертежей. Она представляет двенадцать возможных комбинаций обратных связей. Действительно, обратная связь по напряжению двигателя бывает положительной, как, например, в ЭМУ с самовозбуждением ( см. § 2 - 6), и отрицательной, как это было в предыдущем параграфе. Поэтому перед сигналом обратной связи aUJ ( стоят знаки плюс и минус. Обратная связь по току может быть также положительной, как, например, в предыдущем параграфе, или отрицательной, применяемой иногда для улучшения качества переходных процессов или для снижения жесткости статических характеристик двигателя. Поэтому знаки плюс и минус поставлены также перед сигналом р / г. Наконец, обратная связь по скорости обычно является отрицательной, и поэтому перед сигналом yQ поставлен только отрицательный знак. [40]
Страницы: 1 2 3
www.ngpedia.ru
 Iст
Iст Iст
Iст