





 Балансирные валы впервые были установлены в автомобилях концерна Mitsubishi. Подобная технология получила довольно простое название - бесшумный вал.
Балансирные валы впервые были установлены в автомобилях концерна Mitsubishi. Подобная технология получила довольно простое название - бесшумный вал.Сегодня балансирные валы используются в большинстве моделей автомобилей, выпускаемых под такими брэндами, как GM, Audi, Mercedes, BMW.
Соединение верхнего балансирного вала с нижним валом происходит при помощи приводов. Привод верхнего вала имеет зубчатый ремень, который специальной шестерней задействует привод нижнего вала.
 Валы устанавливаются только парами симметрично по обеим сторонам коленчатого вала. При этом балансирный вал всегда совершает вращательные движения в обратную сторону от коленвала, а скорость его движения увеличивается в два раза.
Валы устанавливаются только парами симметрично по обеим сторонам коленчатого вала. При этом балансирный вал всегда совершает вращательные движения в обратную сторону от коленвала, а скорость его движения увеличивается в два раза.
Это позволяет снизить все вибрации двигателя благодаря обоюдной компенсации инерционных сил балансирных валов коленвала, поскольку эти силы всегда направлены друг к другу.
Фиксация балансирных валов осуществляется только продольно при помощи стопорной пластины, которая крепится к кольцевым канавкам. Подобные крепежные канавки располагаются на каждой шестерне верхнего и нижнего балансирного вала.
Принцип действия КШМ основан на образовании инерционных сил от взаимодействия всех его рабочих механизмов и элементов. Одни элементы, например поршни, совершают движения возвратно-поступательного характера, а другие, шатуны - вращательные движения.
Воздействие инерционных сил в цилиндрах двигателя создают сильную вибрацию и повышенный уровень шума в двигателе в целом, что приводит к перегрузу и быстрому износу отдельных элементов двигателя.
Для того чтобы как-то уравновесить вибрации, создаваемые в двигателе, и применяются балансирные валы.
Для того чтобы снизить вращательные колебания, которые возникают при вращательных движениях вала, используется гаситель колебаний пружинного типа, который устанавливается в звездочке на приводе.
Ремонтные работы по восстановлению работоспособности балансирных валов отличаются сложностью и дороговизной. Именно поэтому многие автовладельцы предпочитают вместо дорогой замены просто снять балансирные валы, а отверстия закрыть специальными заглушками.
Помимо всего прочего использование балансирных валов влияет на сложность конструкции самого автомобильного двигателя, а также на дороговизну его технического обслуживания.
Если все же есть необходимость произвести замену балансирного вала, вместе с новой деталью устанавливается новая цепь с приводом и нижняя шестерня коленвала.
smotr.net
 Можно балансировать не снимая с аппарата. Лучшерезультат на свободно болтающемся креплении. Еще лучше на качающейся раме, использующей резонанс.
Можно балансировать не снимая с аппарата. Лучшерезультат на свободно болтающемся креплении. Еще лучше на качающейся раме, использующей резонанс.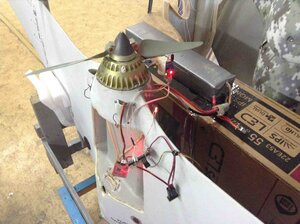

Нам нужны:1)arduino (у меня это mini pro + USB\uart переходник, а еще есть bluetooth модуль чтоб подальше от компа включать)2)акселерометр ADXL345 с SPI подключением(это важно - скорость опроса 3.2кГц) (брал тут по 2.6$ )3)"оптический датчик скорости" который с компаратором дает нам дискретный сигнал таких много всяких. у меня такой с выведенными светодиодом\датчиком для работы по 1 метке на корпусе мотора и такой для работы с пропеллером.подклоючаем так
Description Pro Mini pin ADXL345MISO 12 SDOMOSI 11 SDASCK 13 SCLData Ready 4 INT1Chip Select 10 CSOptical input 2
естественно подключаем питание и во второй прошивке еще светодиод от 3 pin управляется что не обязательно.
Прошивки качать тут https://yadi.sk/d/AsvwOnThV3siT В первой нам надо на мотор метку лепить 1шт (если корпус мотора отражает ИК свечения, то лепим кусочек черной изоленты, если не отражает, то лепим кусочек алюминиевой ленты). Вторая рассчитана на датчик который ловит отраженный свет от лопасти пропеллера. Там как бы запоминается порядок лопастей и светодиодом указывается после остановки пропеллера относительно какой лопасти мы слали сигнал. На практике опорная лопасть теряется так что не важно.
Вкратце как это работает
Имеется у нас источник вибрации наш мотор с пропеллером (или без). Фиксировать вибрацию(сопутствующее ускорение) мы будем акселерометром. Точнее нас интересуют показания только по одной координате. В прошивке у меня это "X" соответственно надо думать как правильно крепить датчик к опоре. В случае горизонтального расположения опоры (см. первые 2 фото) ось должна смотреть в центр вращения. В случае качающейся рамы ось должна быть вертикально. С датчиком "скорости" надеюсь понятно. В первой прошивке у нас 1 метка на корпусе мотора, во второй датчик ловит отражение ИК света от пропеллера (а еще он ловит солнце и это плохо а еще не всякий проп отражает ИК ).По возможности используйте первую. С ней проще работать. По сути прошивка делает 1 простую вещь : собирает 550 значений с акселерометра и датчика скорости (памяти хватило только на 550) и шлет в порт. + там есть в конце текст "end" для разделения данных на компе.
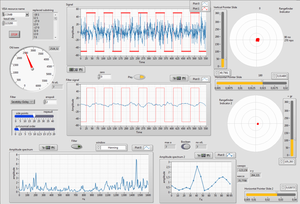
А вот на компе начинается магия (по порядку:не сбалансирован\почти\идеально): 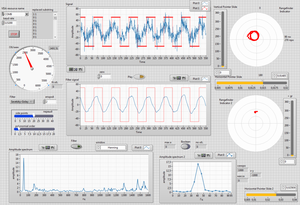
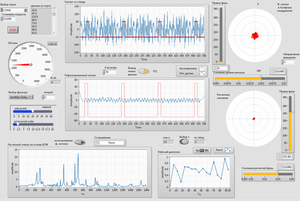 На последнем скриншоте все подписано должно быть понятно (все картинки кликабельны).exe' шник я добавил в архив "N.Esenin" тут https://yadi.sk/d/AsvwOnThV3siT НО! он не будет работать пока не установить в ОС модули http://www.ni.com/download/labview-r...-2013/4059/en/ и http://www.ni.com/download/ni-visa-r...e-5.4/4231/en/ тут надо регистрироваться. Причем я не проверял, будет оно работать или нет. Если запустится то сразу вкл программка с выбранным на шару COM портом. Придется останавливать, вылетит ошибка. потом выбираете нужный com порт и жмете стрелку. Исходник в основном архиве под среду LabVIEW 2013 (еще нужны модули visa и robotics). качать <s>тут</s> сами знаете где
На последнем скриншоте все подписано должно быть понятно (все картинки кликабельны).exe' шник я добавил в архив "N.Esenin" тут https://yadi.sk/d/AsvwOnThV3siT НО! он не будет работать пока не установить в ОС модули http://www.ni.com/download/labview-r...-2013/4059/en/ и http://www.ni.com/download/ni-visa-r...e-5.4/4231/en/ тут надо регистрироваться. Причем я не проверял, будет оно работать или нет. Если запустится то сразу вкл программка с выбранным на шару COM портом. Придется останавливать, вылетит ошибка. потом выбираете нужный com порт и жмете стрелку. Исходник в основном архиве под среду LabVIEW 2013 (еще нужны модули visa и robotics). качать <s>тут</s> сами знаете где
Методика работы получается такая:
1)подбираем обороты такие чтоб получить наибольшую амплитуду да сигнал "четче" (синусоида лучше видна нашей частоты вращения). то есть резонанс и все такое. 2)лепим груз побольше чтоб он нам точно давал знать где у нас лишний вес. корректируем сдвиг фазы чтоб на полярных графиках было указано что куда (я еще сделал смену направления построения графиков для учета направления вращения. эт надо значения углов на -1 умножать иль 1) 3)снимаем груз, крутим на подобранных оборотах смотрим таки на каком угле у нас искомое смещение ( если добавочный угол +180 то сразу показывает куда груз вешать). потом если датчик работает по пропам и таки теряет проп отсчетный появляется подпункт 3.1 в ином случае пункт 4:3.1) вешаем небольшой груз смотрим на изменение амплитуды: увеличился ? значит промахнулись. клеем груз по тому же углу но относительно другого пропа.4)вешаем груз смотрим на амплитуду нужной частоты (об\мин это частота умноженная на 60сек). на остальные пофиг (в этом весь смысл разработки - всегда присутствуют вторичные источники вибрации, как например переключение обмоток и всякие гармоники; наша задача "отделить мух от котлет"). повторять пока не снизится до минимума.
возможны варианты.бывает в ходе таких манипуляций фаза меняется и вообще забываешь относительно чего считается угол как куда клеить. Поэтому на практике получается быстрее если использовать 2 груза: 1 клеится на проп(опять же по амплитуде нужной частоты смотрится какой "правильный") другой на корпус мотора на 90гр (получется как бы 2 перпендикулярные оси). И вот подбирая эти 2 груза мы центр масс загоняем в центр вращения. в итоге влияние смещения масс на суммарную вибрацию получается меньше чем другие факторы (переключение обмоток, подшипники, собственные колебания различных частей и пр.) и дальше балансировать особого смысла нет.
Для примера попавший ко мне rctimer 5010-14 360KV сам по себе имеет такой дисбаланс Еще бывает так
Еще бывает так  В то время как попавший ко мне SunnySky X4108S идеально отбалансирован.Бывает крепление пропа к мотору кривое (Propeller adapter или крепежные отверстия в карбоновом пропеллере смещены).Получается только в связке можно привести сборку ВМГ в норму. А стенд позволяет это сделать быстро, очень точно и еще скажет какие там частоты забиты вибрацией. Можно по спектру все отследить.
В то время как попавший ко мне SunnySky X4108S идеально отбалансирован.Бывает крепление пропа к мотору кривое (Propeller adapter или крепежные отверстия в карбоновом пропеллере смещены).Получается только в связке можно привести сборку ВМГ в норму. А стенд позволяет это сделать быстро, очень точно и еще скажет какие там частоты забиты вибрацией. Можно по спектру все отследить.
www.parkflyer.ru

При работе кривошипно- шатунного механизма возникают силы инерции. Возникновение их связано с движущимися частями механизма. Можно различить следующие виды сил инерции: возвратно- поступательные движения масс и вращающиеся. В многоцилиндровых двигателях также возникают силы инерции и в продольных плоскостях. Проще говоря всё это создаёт вибрации и шум при работе двигателя и увеличивает износ элементов двигателя.Чтобы снизить вибрации производят балансировку двигателя. Наиболее часто при балансировке на щёки коленвала устанавливают противовесы. Но это не может позволить уравновесить инерционные силы у разных компоновочных схем двигателя. Например у рядных четырёхцилиндровых двигателей не уравновешиваются силы инерции второго порядка. Величина сил инерции возрастает с увеличением объёма двигателя.Чтобы уравновесить инерционные силы второго порядка на рядных четырёхцилиндровых двигателях объёмом 2 и более литра, применяют специальные валы имеющие противовесы, т.е. балансировочные валы.

Впервые балансировочный вал был применён в 1976 году компанией "Mitsubishi"Устанавливают балансировочные валы попарно с обоих сторон коленвала, обычно их устанавливают симметрично. Но для того чтобы уменьшить занимаемое место предпочтительно установить балансировочные валы в картере двигателя, ниже коленвала. Балансировочный вал представляет собой сложную деталь выполненную из металла, обычно он выглядит как стержень в котором выбраны пазы. Вращается балансировочный вал в подшипниках скольжения, которые включены в систему смазки двигателя.Приводятся в движение балансировочные валы коленвалом и вращаются в разные стороны с удвоенной угловой скоростью. Приводом может служить зубчатый бесзазорный редуктор, цепные передачи либо их комбинации. Чтобы гасить крутильные колебания в процессе работы в приводной звёздочке (цепной привод ) устанавливают специальный пружинный гаситель.#двигатель #мотор #балансировка

carakoom.com
Насос приводится в движение балансирным электродвигателем 12, даюш им возможность определять мош,ность, потребляемую насосом. Частота вращения измеряется тахометром 11. Обычно для испытания насосов применяют балансирные электродвигатели с регулируемой частотой вращения. Например, часто применяют электродвигатели [c.223]
Схема закрытой испытательной установки изображена на рис. 3-25. Насос 9 подключен к герметическому баку 3. На подводящем трубопроводе у входного патрубка насоса установлены манометр 12 (при нормальных испытаниях насоса) и вакуумметр 13 (при кавитационных испытаниях насоса). На напорном трубопроводе размещены манометр 8, расходомер 6 с дифференциальным манометром 7 и регулировочная задвижка 4, расположенная за расходомером. Мощность насоса определяется при помощи балансирного электродвигателя 10 с регулируемой частотой вращения. Частота вращения измеряется тахометром 11. [c.223]Произвести испытание насоса при десяти режимах его работы при подачах, уменьшающихся от максимальной до нуля через примерно равные интервалы. Новая подача устанавливается изменением открытия регулировочной задвижки и контролируется по показанию дифференциального манометра расходомера. При каждом режиме необходимо снять показания В вакуумметра 5 (рис. 3-24), М манометра 7, Л дифференциального манометра 9 расходомера 8, Р балансирного электродвигателя и, в случае, если применен нерегулируемый двигатель, тахометра И. [c.225]
Последовательность снятия кавитационной характеристики на открытом стенде такая. При помощи задвижки 10 устанавливают подачу, при которой необходимо определить критическую высоту всасывания. Снимают показания вакуумметра 5, манометра 7, дифференциального манометра 9, балансирного электродвигателя 12 и термометра 3. После этого прикрытием задвижки 2 устанавливают другой вакуум у входа в насос. При этом подача насоса изменяется. При помощи задвижки 10 восстанавливают прежнюю подачу (кавитационная характеристика снимается при постоянной подаче насоса). После этого снимают показания приборов. Затем снова устанавливают новый вакуум при помощи задвижки 2 и т. д. При испытании частота вращения поддерживается постоянной. [c.244]
Если при изменении вакуума в кавитационном баке подача насоса изменится, то ее следует восстановить при помощи задвижки 4. Снимают показания вакуумметра 13, манометра 8, дифференциального манометра 7, балансирного электродвигателя 10 и термометра 14. Затем, снова открыв вентиль 2, устанавливают новый вакуум и т. д. Частота вращения при испытании поддерживается постоянной. [c.244]
Погрешности о р измерения усилия Р и a pg регулирования балансирного электродвигателя определяются порогом чувствительности балансирного электродвигателя, который равен минимальному грузу А, вызывающему изменение показаний балансирного электродвигателя при вращающемся якоре. Принимая порог чувствительности балансирного электродвигателя за максимальную абсолютную погрешность и учитывая, что закон распределения погрешности из-за нечувствительности прибора равномерный (см. рис. 1-4), получим на основании уравнения (1-14) [c.251]
Погрешностью измерения длины рычага балансирного электродвигателя обычно можно пренебречь. [c.251]
В лопастном насосе механические потери мощности складываются из дисковых потерь и потерь в сальниках и подшипниках. Дисковые потери пропорциональны разности Р — Р показаний балансирного электродвигателя при вращении рабочего колеса, залитого парафином, в воде и в воздухе. Погрешность величины Р — Р определяется лишь неточностью измерения и не зависит от погрешности регулирования балансирного электродвигателя (последняя входит одинаковым слагаемым в величины Р п Р я при определении их разности исключается). Следовательно, [c.253]
Условием для непосредственного измерения передаваемой мощности при помощи балансирного электродвигателя (мотор-Весов), или торсионного динамометра является наличие достаточного равномерно вращающего момента привода или насоса. Угол закручивания вала с известным модулем сдвига и полярным моментом инерции, передающего крутящий момент, на некоторой точно определенной длине находят с помощью оптических или электрических приборов, В процессе измерения особенно внимательно необходимо следить за тем, чтобы вал по всей измеряемой длине свободно вращался и не был защемлен. Перед замером и после него следует проверять нулевую отметку шкалы торсионного динамометра. [c.163]
При использовании оптических приборов точность отсчета не превышает 0,5 %, После достижения установившегося режима необходимо минимум 3 раза через равные промежутки времени снять показания торсионного динамометра (угол поворота а) или показания балансирного электродвигателя (величина силы Р). Тогда крутящий момент можно определять из выражений [c.163]
Для малых и средних насосов наибольшее распространение получило измерение реактивного момента, равного по величине крутящему, балансирного электродвигателя или двигателя на качающейся платформе (рис. 149). При этом усилие Р должно измеряться с предельной погрешностью не более 0,5%. Наибольшее распространение получило измерение усилия на плече I с помощью весовых устройств. Нечувствительность системы не должна превышать значений, приведенных в ГОСТ 6134—71. [c.272]
Различают электронасосный агрегат и электронасос. Конструкция первого насоса обычная, и приводящим двигателем является электродвигатель. Электронасос — насосный агрегат с приводом от электродвигателя, узлы которого входят в конструкцию насоса. Мощность или момент при одновременном измерении частоты вращения измеряются при испытаниях малых насосов — балансирным электродвигателем, двигателем на качающейся платформе [c.85]
Момент трения в замкнутом контуре измеряется балансирным электродвигателем [c.321]
При измерении момента балансирным электродвигателем или двигателем на качающейся платформе должны учитываться вентиляционный и механический моменты двигателя, определяемые при работе двигателя без нагрузки. [c.88]
Для измерения крутящего момента применяются балансирные электродвигатели и двигатели на качающейся платформе. [c.162]
Мощность насоса. Наиболее часто для определения мощности, потребляемой насосом, применяют балансир-ные электродвигатели, которые измеряют момент на муфте насоса. В отличие от обычного электромотора статор ба-лансирного электродвигателя подвешен на двух неподвижных стойках и может поворачиваться вокруг оси двигателя. Конструкция балансирного электродвигателя изображена на рис. 3-23. К крышкам электродвигателя жестко прикреплены цапфы 1 я 4. Через цапфу 4 проходит вал двигателя. Цапфы поворачиваются в двухрядных само-устанавливающихся шарикоподшипниках 2 и 5, закреп- [c.219]
Поддерживать постоянные моменты сопротивления в широких пределах их изменения и при большом диапазоне изменения числа оборотов способны электромагнитные тормоза и балансирные электродвигатели, используемые в режиме генераторов. Фрикционные тормоза, в результате переменности коэффициента трения из-за худших условий охлаждения, обеспечивают меньшую стабильность нагружаюш,его момента при больших мощностях. Зато они способны создавать большие моменты при самых малых частотах вращения, превосходя в этом отношении электрические тормоза. Иногда при очень большом диапазоне изменения частот вращения гидромотора применяют комбинацию из последовательно соединенных фрикционного и электрического тормозов, каждый из которых используется в своей зоне частот. [c.341]
В качестве приводов опытных установок обычно применяют балансирные электродвигатели с 2—2,5-кратным диапазоном регулирования числа оборотов. Мощность двигателя выбирают с учетом максимального момента Мх, потребляемого гидропередачей при наибольшем числе оборотов ведущего вала. В качестве тормозных устройств предпочтительны индукторные электротормоза или элек-тромашинные динамометры, представляющие собой балансирные электромашины, аналогичные электродвигателям установок, но используемые в качестве генераторов. Тормозные устройства последнего типа обратимы, т. е. могут работатв и как двигатели. Это позволяет снимать полную характеристику гидропередачи, испытывая ее на обращенных режимах, когда приводящий момент приложен к турбинному колесу, и на режимах противовращения колес (/ выполняет функции тормоза. Такие режимы работы встречаются при работе строительных, дорожных и транспортных машин. [c.400]
Методика проведения предварительных искытаиий зависит от конструкции гидропередачи и испытательного приспособления 16. Поэтому единой методики их проведения быть не может. Рассмотрим в виде примера такие испытания для гидропередач, показанных иа рис. 5-15 и 5-16. Моменты и можно определить, сняв с валов рабочие колеса, и вращая валы 7 и / специальным маломощным высокочувствительным балансирным электродвигателем. При этом будем вращать сначала вал 7 при остановленном вале 1, затем вал 1 при остановленном вале 7. В первом случае момент балансирного двигателя [c.402]
Балансирный электродвигатель представляет собой нормальный эЛ ектродвигатель, корпус которого не прикреплен к основанию, как обычно, а подвешен над основанием на специальных кронштейнах. Крутильный динамометр, а также балансирный электродвигатель позволяют непосредственно определить крутящий момент на валу насоса. [c.48]
chem21.info
| 1. Проверните коленчатый вал двигателя таким образом, чтобы поршень первого цилиндра установился в верхней мертвой точке. |
| 2. Установите вал балансира 2 в положение, показанное на рисунке Исходное положение меток балансира 2. |
| 3. Установите сборку балансира на блок цилиндров двигателя и закрепите болтами, затянув их в определенной последовательности (см. рис. Последовательность затягивания болтов крепления сборки балансира). |
| 4. Так как люфт между коленчатым валом и валом балансира 1 изменяется при вращении, измерьте люфт в четырех обозначенных положениях (см. рис. Положения, в которых необходимо измерить люфт вала балансира 1 по отношению к коленчатому валу). |
| 5. Проверните коленчатый вал двигателя на несколько оборотов и установите в положение в котором поршень первого цилиндра находится в верхней мертвой точке. Проверьте, что метки на сборке балансира повторно совместились. |
| 6. Проверните коленчатый вал двигателя по часовой стрелке до совмещения метки вала балансира 1 с указателем (см. рис. Определение люфта вала балансира 1). |
| 7. Установите индикатор часового типа на зубья шестерни вала балансира 1 (см. рис. Установка индикатора часового типа для измерения люфта вала балансира). Прикладывая незначительное усилие, поверните вал балансира 1 в стороны и определите люфт. |
| 8. Снимите индикатор часового типа и проверните коленчатый вал двигателя по часовой стрелке до тех пор, пока метка D на валу балансира 1 не совместится с указателем (см. рис. Второе и четвертое положение для измерения люфта вала балансира 1). Установите индикатор часового типа и измерьте люфт. |
| 9. Если величина люфта отличается от требуемых значений, установите прокладку между сборкой балансира и блоком цилиндров требуемой толщины. |
carmanz.com









