Основным элементом системы управления шаговым двигателем (ШД) является полупроводниковый коммутатор, который переключает фазные токи Iф в обмотках ШД, как показано на рис. 2-4.1. Типичная схема силового ключа СК показана на рис. 2-4.2,а,
где диод VD и резистор Rр служат для ускорения спада фазного тока при отключении обмотки транзистором VT. Скорость нарастания фазного тока при включении VT зависит от величины напряжения питания E и постоянной времени цепи L/(R+Rдоб). Для увеличения быстродействия систесмы требуется увеличить скорость нарастания фазных токов при коммутации обмотки. Для этого используется ключ с форсировкой, схема которого приведена на рис. 2-4.2,б. Импульсное форсирование заключается в подключении обмотки фазы ШД к источнику форсирующего напряжения Е2 на время, необходимое для нарастания тока, а после этого обмотка подключается к источнику пониженного напряжения Е1, обеспечивающему поддержание заданного тока в обмотке. В этой схеме сперва включаются оба транзистора, а диод VD3 отделяет источник Е2 от источника Е1, затем транзистор VT1 отключается, и фазный ток идет от Е1 через диод VD3. Характер протекания переходных процессов в схеме показан на рис. 2-4.2, в.
Наилучшие энергетические соотношения в контуре управления ШД обеспечивает коммутатор с импульсной стабилизацией фазовых токов, схема которого показана на рисунке 2-4.3.а.
Часть схемы на транзисторах VT3-VTn представляет собой коммутатор, который питается от источника повышенного напряжения через импульсный стабилизатор тока состоящий из силового транзистора VT2, усилителя VT1, компаратора K и измерительного резистора Rш. В этой схеме повышенное напряжение питания E обеспечивает быстрое нарастание фазного тока, а импульсный стабилизатор ограничивает среднее значение тока в фазе Iф с помощью широтно-импульсной модуляции, как показано на рисунке 2-4.3.б.
Действие такого коммутатора аналогично коммутатору с форсированием, однако время форсировки tф здесь задается автоматически за счет обратной связи через резистор Rш. Способы коммутации обмоток ШД
Параметры шагового привода зависят от способа коммутации. Наиболее распространенной является симметричная коммутация, при которой в каждый такт активизируется одинаковое число обмоток. На рисунке 2-4.4.а показана временная диаграмма одинарной симметричной коммутации для четырехфазного двигателя, когда в один такт активизируется одна фазная обмотка. Большое распространение имеет парная коммутация, при которой в каждый такт запитываются две смежные обмотки, как показано на рисунке 2-4.4.б .
|
|
|
И в том и в другом случае количество тактов в цикле n равно количеству фаз двигателя m (в данном случае m = 4 ) и шаг двигателя одинаков при обоих способах коммутации.
При несимметричной коммутации возможно уменьшить шаг двигателя и тем самым увеличить точность привода. На рисунке 2-4.5.а показана временная диаграмма несимметричной
коммутации с делением шага пополам - режим полушагов. Цикл содержит восемь тактов (n = 2m), но при этом в каждый включена либо одна либо две обмотки, что приводит к колебаниям вращающего момента ШД. С целью стабилизации вращающего момента можно уменьшать фазовый ток когда включены две фазы в 2 раз с помощью ШИМ, как показано на рисунке 2-4.5.а пунктиром.Применение ШИМ дает возможность плавно изменять токи в фазах и добиться большего дробления шага с целью увеличения точности и плавности работы шагового привода - режим мелких шагов. Временная диаграмма такого режима для четырехфазного ШД показана нарисунке 2-4.5.б .
Здесь при каждом положении ротора соответствующем "мелкому" шагу одна обмотка постоянно включена, другая - постоянно выключена, а две остальные переключаются на несущей частоте с изменяемой скважностью. Величина мелкого шага зависит от количества изменения скважности. Например, если скважность задается двухразрядным счетчиком, то происходит дробление шага на 4 и цикл будет содержать 4*4=16 тактов.
studfiles.net
Изобретение относится к электротехнике и может использоваться для регулирования электродвигателей с шаговым вращением. Цель изобретения - повышение 6 -И с КПД коммутатора. Коммутатор содержит низковольтный 1 и высоковольтный 2 источники питания, ключ 4, управляемый входным сигналом, форсировочный ключ 7, два силовых диода 5 и 6, трансформатор 9 с первичной 14 и вторичной 8 обмотками и обмоткой 11 положительной обратной связи , резистор-датчик 10 тока, ключ 13 отключения форсиррвки, разделительный конденсатор 17, токоограничивающий резистор 15 и шунтирующий диод 16. Резистор-датчик может быть шунтирован конденсатором 18. КПД возрастает вследствие снижения рассеиваемой мощности в элементах , находящихся под большим током. Включение конденсатора 18 параллельно резистору-датчику 10 приводит к повышению устойчивости процесса закрытия форсироврчного ключа 7. 1 з. п. ф-лы, 2 ил. сл С О7 с I. Л Р N fO 4 00 Јь
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК (я)э Н 02 P 8/00
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4750536/07 (22) 18.10;89 (46) 23.03.92. Бюл. hh 11 (71) Ленинградский государственный университет (72) А.В.Зиновьев (53) 621.313.525 (088.8) (56) Авторское свидетельство СССР
М 1166258, кл. Н 02 Р 8/00, 1986.
Кенио Т. Шаговые двигатели и их микропроцессорные системы управления. — М.:
1987, с. 113. (54) КОММУТАТОР ФАЗЫ ШАГО ВОГО
ДВИГАТЕЛЯ (57) Изобретение относится к электротехнике и может использоваться для регулирования электродвигателей с шаговым вращением. Цель изобретения — повышение,, Ж,„, 1721784 А1
КПД коммутатора. Коммутатор содержит низковольтный 1 и высоковольтный 2 источники питания, ключ 4, управляемый входным сигналом, форсировочный ключ 7, два силовых диода 5 и 6, трансформатор 9 с первичной 14 и вторичной 8 обмотками и обмоткой 11 положительной обратной связи, резистор-датчик 10 тока, ключ 13 отключения форсировки, разделительный конденсатор 17, токоограничивающий резистор 15 и шунтирующий диод 16, Рези- . стор-датчик может быть шунтирован конденсатором 18. КПД возрастает вследствие снижения рассеиваемой мощности в элементах, находящихся под большим током.
Включение конденсатора 18 параллельно резистору-датчику 10 приводит к повышению устойчивости процесса закрытия форсировочного ключа 7. 1 з.п; ф-лы, 2 ил.
1721784
Изобретение относится к устройствам для регулирования электродвигателей с шаговым вращением якоря.
Известны схемы коммутаторов фазы шагового двигателя (ШД) с одним источником питания.
Недостатком известной схемы является низкий диапазон скоростей вращения двигателя из-за ограниченной скорости изменения тока в его обмотках.
Известны схемы коммутаторов фазы
ШД с двумя источниками питания с повышенной скоростью изменения тока в нагрузке.
ИЗвестный коммутатор содержит низковольтный M высоковольтный источники питания с общим выводом, основной ключ, соединенный выходом с общим выводом, силовым входом - с клеммой для.подключения одного вывода коммутируемой обмотки и через первый диод с выводом высоковольтного источника питания и силовым входом ключа форсировки, и второй диод, соединенный с выводом низковольтного источни ка питания и с клеммой для подключения к второму выводу коммутируемой обмотки.
Управляющий вход ключа форсировки через буферный транзисторный каскад и моностабильный мультивибратор связан с управляющим входом коммутатора.
Недостатком известного коммутатора является недостаточно высокое быстродействие по цепи форсировки из-за низкого выходного сопротивления буферного транзисторного каскада ключа управления форсировки, что приводит к увеличению динамических потерь мощности и снижению надежности ключа форсировки.
Цель изобретения — повышение быстродействия.
Поставленная цель достигается тем, что в известном коммутаторе фазы ШД введены ключ прекращения форсировки, разделительный резистор, шунтирующий диод, разделительный конденсатор, токоограничивающий резистор, датчик тока и
-трансформатор, цепь из последовательно соединенных первичной обмотки трансформатора и токоограничивающего резистора подключена параллельно шунтирующему диоду между управляющим входом ключа прекращения форсировки к выводам разделительного конденсатора, другой вывод которого соединен с входом основного ключа, управляющий вход ключа прекращения форсировки через разделительный резистор соединен с датчиком тока и выводом обмотки положительной обратной связи (ПОС) трансформатора, другой вывод которой подключен к управляющему входу
55 ключа форсировки, второй .вывод датчика тока соединен с выходом ключа прекращения форсировки и вторым диодом.
В результате достигается низкое выходное сопротивление цепи управления ключа форсировки, что приводит к повышению быстродействия.
С целью повышения надежности коммутатор снабжен конденсатором, подключенным параллельно датчику тока.
На. фиг.1 представлен вариант схемы коммутатора; на фиг,2 — временная диаг- . рамма работы коммутатора, Коммутатор фазы ШД содержит низковольтный 1 и высоковольтный 2 источника питания с общим минусом, коммутируемую обмотку 3. Один конец коммутируемой обмотки 3 через управляемый входным сигналом основной ключ (NPN-транзистор) 4 связан с общим приводом и через диод 5 с плюсом высоковольтного источника 2.
Другой конец нагрузки 3 связан с плюсом низковольтного источника через диод 6 и с плюсом высоковольтного источника через последовательно включенные ключ 7 форсировки (NPN-транзистор), обмотку
ПОС 8 трансформатора 9, резистор-датчик
10 тока. Вторичная обмотка 11 трансформатора 9 соединена с базой и эмиттером форсировочнога транзистора 7. Полюса резистора-датчика 10 тока соединены с эмиттером и базой (через резистор 12)
NPN-транзистора — ключа 13 прекращения форсировки, коллектор которого соединен с базой форсировочного транзистора 7.
Последовательно соединенные первичная обмотка 14 трансформатора и токоограничивающий резистор 15 зашунтированы диодом 16 и Связаны одним концом с базой транзистора 13, другим концом через разделительный конденсатор 17 с точкой соединения коммутируемой обмотки 3 и коллектора транзистора 4, Связь базы транзистора 13 через диод 16 и конденсатор 17 с точкой соединения ключа 4 и коммутируемой обмотки 3 обеспечивает дополнительную ПОС для транзистора ключа 13 прекращения форсировки. Резистор-датчик 10 тока зашунтирован конденсатором 18.
На фиг.2 представлены временные диаграммы следующих величин: входной сигнал 19, напряжение 20 на коллекторе транзистора 4 (один конец коммутируемой обмотки 3), напряжение 21 на противоположном конце коммутируемой обмотки, ток
22 в коммутируемой обмотке, ток 23 в первичной обмотке 14 трансформатора 9, ток 24 вторичной обмотки 11, падение напряженйя
25 на резисторе-датчике 10 тока, где U> — на1721784
4 и 7 коммутируют на обмотку 3 напряжение
20 высоковольтного источника, вызывая в ней плавное нарастание тока (диаграмма 22).
Нарастающий ток через открытый ключ
7 приводит к прямопропорциональному росту падения напряжения 25 на резисторе — 25 датчике 10 тока. При достижении падения напряжения 25 заданного порога (около
0,7 В) приоткрывается транзистор 13 прекращения форсировки, который, шунтируя управляющий вход ключа 7 форсировки,уве- 30 личивает в ключе 7 падение напряжения.
Действие дополнительной ПОС по напряжению путем разряда разделительного конденсатора 17 в базе транзистора 13 ведет к лавинообразному нарастанию коллекторно- 35
ro тока транзистора 13 и быстрому закрытию транзистора 7, Конденсатор 18 за счет наличия подпора отрицательным напряжением базы транзистора 7 в начальный момент его закрытия обеспечивает увеличение 40 устойчивости процесса выключения транзистора 7, и следовательно, повышение надежности коммутатора.
После выключения транзистора 7.ток в коммутируемую обмотку 3 поступает от низ- 45 ковольтного источника 1 через диод 6. При этом он мало меняется во времени и его установившееся значение определяется активным сопротивлением коммутируемой обмотки 3. 50
При выключении транзистора 4 в коммутируемой обмотке 3 через диоды 5 и 6 прикладывается разность напряжений источников 2 и 1 в обратном направлении, вызывая в коммутируемой обмотке 3 быст- 55 рый спад тока (диаграмма 25).
Дополнительная ПОС для ключа 13 прекращения форсировки может быть осуществлена другими способами, например путем связи базы транзистора прекращения форг пряжение низковольтного источника 1, U2— напряжение высоковольтного источника 2.
Коммутатор работает следующим образом.
Замыкание транзисторного ключа 4 под 5 действием входного сигнала 19 обеспечивает прохождение тока 22 через коммутируемую обмотку 3. В момент. перехода от разомкнутого к замкнутому состоянию транзистора 4 скачок напряжения на его 10 коллекторе передается через кбнденсатор
17 и резистор 15 в первичную обмотку 14 трансформатора 9, вызывая в ней скачок тока 23, который трансформируется в ток
24 вторичной обмотки и вызывает откры- 15 вание форсировочного транзистора 7.
ПОС по току через обмотку 8 трансформатора 9 обеспечивает дальнейшее открытое состояние транзистора 7, Открытые ключи сировки,.соединенной через резистор с полюсом резистора - датчика 10 тока, с высоковольтным источником 2, низковольтным источником 1 или общим проводом через конденсатор. Кроме того, в качестве ключа
13 прекращения форсировки может быть использован управляемый тиристор, который является ключом с внутренней ПОС. В случаях организации ПОС для ключа 13 прекращения форсировки указанными способами противоположный от управляющего входа коммутатора конец первичной обмотки трансформатора связан с общим привбдом.
Первичная обмотка трансформатора 9 может быть включена через разделительный конденсатор в любую из точек входной цепи коммутатора, где присутствует сигнал управления коммутатором. Данная связь может быть использована вместо подключения первичной обмотки через резистор 15 и конденсатор 17 к коллектору транзистора 4.
При максимальном токе в нагрузке 3 ампера падение напряжения в силовых диодах 5 и 6 и ключах 4 и 7 около 1 В, рассеиваемая мощность в выходном каскаде открытого коммутатора будет около 6 Вт.
Для сравнения рассеиваемая мощность в известном коммутаторе.при напряжении высоковольтного источника 2,2 кВ и базовом- токе форсировочного транзистора 7 0,5
А составляет не менее 100 Вт. Поэтому рассеиваемая мощность в предлагаемом ком- мутаторе уменьшается в несколько раз по сравнению с известным,. что приводит к соответствующему росту КПД, и в сочетании с упрощением схемы позволяет повысить надежность, снизить вес и габариты конструкции коммутатора, а также использовать увеличенное напряжение высоковольтного источника для повышения максимальной рабочей скорости вращения шагового двигателя.
Формула изобретения
1. Коммутатор фазы шагового двигателя, содержащий низковольтный и высокоBoJlbTHblA источники питания с общим выводом, основной ключ. соединенный выходом с общим выводом, силовым входом— с клеммой для подключения одного вывода коммутируемой обмотки и через первый диод с выводом высоковольтного источника питания и силовым входом ключа форсировки, и второй диод, соединенный с выводом низковольгного источника питания и с клеммой для подключения к второму выводу коммутируемой обмотки. о t л ич а ю шийся тем, что, с целью повышения
1721784
Составитель А. Зиновьев
Техред М,Моргентал Корректор М. МаксимишинецРедактор H. Тупица
Заказ 962 Тираж .Подписное, ВНИИПИ Государственного комитЕта по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина. 101 быстродействия, введены ключ прекращения форсировки, разделительный резистор, шунтирующий диод. разделительный конденсатор, токоограничивающий резистор, датчик тока и трансформатор, цепь 5 из последовательно соединенных первичной обмотки трансформатора и токоограничиваю щего резистора подключена параллельно шунтирующему диоду между управляющим входом ключа прекращения 1О форсировки и выводом разделительного конденсатора, другой вывод которого соединен с входом основного ключа, управляющий вход ключа прекращения форсировки
8 через разделительный резистор соединен с датчиком тока и выводом обмотки положительной обратной связи трансформатора, другой вывод которой подключен к выходу ключа форсировки вместе с выводом вторичной обмотки, другой вывод которой подключен к управляющему входу ключа форсировки, второй вывод датчика тока соединен с выходом ключа прекращения форсировки и вторым диодом.
2. Коммутатор по п.1, о т л и ч а ю щ и и с я тем, что, с целью повышения надежн сти. в него введен конденсатор, подключе ный параллельно датчику тока.




www.findpatent.ru
Принцип действия. Шаговые (импульсные) двигатели представляют собой синхронные микродвигатели, у которых питание фаз обмотки якоря осуществляется путем подачи импульсов напряжения от какого-либо (например, электронного) коммутатора. Под воздействием каждого такого импульса ротор двигателя совершает определенное угловое перемещение, называемоешагом. Коммутатор преобразует заданную последовательность управляющих импульсов в т-фазную систему одно- или двухполярных прямоугольных импульсов напряжения;
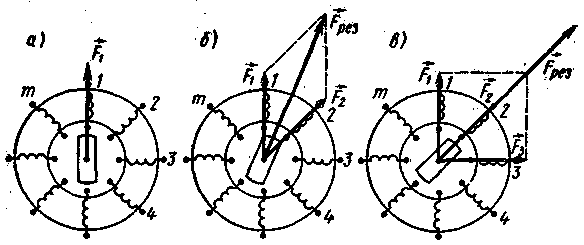 |
| Рис. 7.15. Схемы работы шагового двигателя при питании различных фаз обмотки якоря |
На рис. 7.15 изображена схема m-фазного шагового двигателя без обмотки возбуждения на роторе. Если фазы 1, 2, 3,...,m обмотки якоря рассматриваемого двигателя питаются поочередно однополярными импульсами напряжения, то ротор двигателя скачкообразно перемещается в положения, при которых его ось совпадает с осями фаз 1,2, 3 и т. п. Следовательно, ротор имеетm устойчивых состояний, соответствующих направлению вектора МДС F→1 (рис. 7.15, а) обмотки якоря в данный момент времени; при этом шаг ротора равен 2π/m.
Для увеличения результирующей МДС якоря, а следовательно, магнитного потока и синхронизирующего момента обычно одновременно подают питание на две, три и большее количество фаз. Так, например, если одновременно подают питание на две фазы, то положение результирующего вектора МДС F→peз и оси ротора совпадает с линией, проходящей между осями двух соседних фаз (рис. 7.15,б). При подаче питания одновременно на три соседние фазы ротор перемещается в положение, совпадающее с осью средней фазы (рис. 7.15, в). Если поочередно включают то четное (две), то нечетное (одна, три) число фаз, то ротор двигателя имеет 2mустойчивых состояния и шаг равен π/m. Управление двигателем, при котором фазы обмотки якоря включают поочередно равными группами по две, три и т, п., называют симметричным; поочередное включение неравных групп фаз — несимметричным.
В качестве шаговых обычно применяют синхронные двигатели без обмотки возбуждения на роторе: с постоянными магнитами, реактивные и индукторные (с подмагничиванием). Для получения требуемых статических характеристик и динамических свойств их выполняют без пусковой обмотки, с ротором минимального диаметра и рассчитывают на большие электромагнитные нагрузки.
 | |
| Рис. 7.16. Положения ротора шагового двигателя с постоянными магнитами при различных полярностях включения его фаз и диаграмма изменения тока в этих фазах |  |
Применение шагового двигателя целесообразно для привода механизмов, имеющих старт-стопное движение, или механизмов с непрерывным движением, если управляющий сигнал задан в виде последовательности импульсов (лентопротяжных устройств для ввода и вывода информации, счетчиков, приводов станков с программным управлением и т. п.).
Двигатели с постоянными магнитами. Ротор двигателя (рис. 7.16) выполняют в виде постоянного магнита (звездочки) литой или составной конструкции без полюсных наконечников. Статор имеет явно выраженные полюсы, вокруг которых в полузакрытых пазах размещаются катушки обмотки якоря (двух-, трех- или четырехфазной). В многополюсных машинах число пазов на полюс и фазу q = 1, т. е. обмотку выполняют сосредоточенной. Шаговые двигатели этого типа называют также магнитоэлектрическими.
В двигателе с двухфазной обмоткой якоря при последо-вательной подаче импульсов напряжения на катушки полюсов ось магнитного потока скачкообразно перемещается на 90° (рис. 7.16, а, б, в). В результате под действием синхронизирующего момента при каждом импульсе ротор поворачивается на 90°, т.е. делает шаг, равный 90°. Возникновение синхронизирующего момента в шаговом двигателе при подаче питания на фазы обмотки якоря обусловлено теми же причинами, что и в синхронном двигателе обычного исполнения. В рассматриваемом двигателе магнитное поле якоря может иметь четыре различных состояния, которым соответствуют различные направления тока в фазах 1 и 2 его обмотки:
1. ток в фазе 1 направлен от начала к концу; фаза 2 обесточена;
2. ток в фазе 2 направлен от начала к концу; фаза 1 обесточена;
3. ток в фазе 1 направлен от конца к началу; фаза 2 обесточена;
4. ток в фазе 2 направлен от конца к началу; фаза 1 обесточена.
Порядок переключения (коммутации) фаз 1 и 2 обмотки якоря представлен на рис. 7.16, г в виде временной диаграммы; изменения токов Iв1 и Iв2 в этих фазах. Каждому импульсу тока соответствует определенное положение ротора двигателя. Рассмотренную систему переключения фаз 1 и 2 обмотки якоря называют четырехтактной разнополярной коммутацией и сокращенно обозначают следующим образом: (+1)-(+2)-(-1)-(-2)-(+1) - .... Каждым четырем тактам соответствует поворот ротора на два полюсных деления. Чтобы изменить направление вращения ротора, следует изменить полярность включения одной из фаз обмотки якоря, не изменяя очередность их коммутации. Для уменьшения шага шаговые двигатели обычно выполняют многополюсными. При этом число полюсных выступов на роторе должно быть равно числу полюсов статора. Наиболее часто используют восьмиполюсные шаговые двигатели. Шаг двигателя представляет собой угол поворота ротора за один такт:
(7.15)
αш = 360/(kp),
где k — число тактов в одном цикле; р — число пар полюсов. При четырехтактной коммутации шаг восьмиполюсного двигателя αш = 22,5°. Частота вращения ротора двигателя зависит от частоты подачи импульсов:
(7.16)
n2 = 60f1αш /360 = 60f1 /(kp).
Диапазон изменения частоты при четырехтактной коммутации обычно составляет 0 — 500 Гц; максимальной частоте соответствует частота вращения n2 max = 2000 ÷ 3000 об/мин. В ряде случаев для лучшего использования обмоток применяют четырехтактную коммутацию с попарным включением обмоток: (+1)(+2)-(+2)(-1)-(-1)(-2)-(-2)(+1)-(+1)(+ 2) - .... Такое включение обмоток позволяет увеличить результирующую МДС ротора, вследствие чего возрастает вращающий момент на валу двигателя примерно в полтора раза.
Обычно шаговые двигатели имеют четырехфазную обмотку, которая в отличие от двухфазной может управляться однополярными импульсами напряжения; это упрощает конструкцию электронного коммутатора. При подключении к электронному коммутатору фазы такой обмотки соединяют в четырехлучевую звезду с выведенной общей точкой. Коммутацию четырехфазной обмотки обычно выполняют четырехтактной, парной: (12)-(23)-(34)-(41)-(12)- ..., вследствие чего обеспечивается такое же увеличение вращающего момента, что и при попарной разнополярлой коммутации двухфазной обмотки. Шаговые двигатели с трехфазной обмоткой требуют шеститактнойразнополярной коммутации.
Реактивные двигатели. Ротор реактивного шагового двигателя выполняют из магнитномягкого материала. На статоре обычно располагают трехфазную сосредоточенную обмотку якоря, фазы которой получают питание от электронного коммутатора. Шаговые двигатели этого типа называют также параметрическими. На рис. 7.17, а, б и в схематично показаны три такта работы реактивного шагового двигателя с трехфазной обмоткой якоря и шестью выступами на статоре; на роторе имеются только два выступа. Когда по фазе 1 проходит ток, ротор занимает положение, показанное на рис. 7.17, а. В следующий момент времени питание подается одновременно на фазы 1 и 2, и ротор поворачивается в положение (рис. 7.17,б), соответствующее наибольшей магнитной проводимости для потока, созданного этими фазами. Далее питание с фазы 1 снимается и ротор перемещается в положение рис. 7.17, в. Таким образом, коммутация обмоток
 | |
| Рис. 7.17. Положения (ротора реактивного шагового двигателя при различных полярностях включения фаз и диаграмма изменения тока в этих фазах |  |
статора происходит в следующем порядке:. (1) — (12) — (2) — (23) — (3) — (31) — (1)..., т. е. коммутация является несимметричной, шеститактной, однополярной (рис. 7.17, г). При этом шаг двигателя αш = 30°. Возможна и трехтактнаякоммутация но схеме: (1) - (2) - (3) - (1) или (12) - (23) - (31) - (12).... Как правило, применяют шеститактную коммутацию, которая дает меньший шаг и большую устойчивость работы двигателя.
Шаг двигателя можно уменьшить, увеличив число выступов на роторе. Например, применяя шаговый двигатель с крестообразным ротором, при той же последовательности подачи импульсов, что и для двигателя, показанного на рис. 7.17, получают шаг, равный 15°. Дальнейшее уменьшение шага, т. е. повышение точности работы двигателя, можно обеспечить, увеличив число выступов на статоре и роторе, т. е, перейдя к схеме редукторного двигателя (см. рис. 7.11).
При малом шаге (5 — 1°) применяют реактивный редукторный шаговый двигатель с гребенчатыми выступами на статоре. Выпускаемые отечественной промышленностью реактивные редукторные шаговые двигатели имеют на статоре шесть полюсных выступов с гребенчатой зубцовой зоной.
Двигатели с подмагничиванием (индукторные). По конструктивному исполнению и принципу работы рассматриваемые двигатели сходны с редукторными двигателями, имеющими радиальное возбуждение. Возбуждение может создаваться обмоткой постоянного тока или постоянным магнитом, находящимся на статоре, как и в редукторных двигателях. Однако в шаговых индукторных двигателях постоянная составляющая магнитного поля обычно образуется за счет особого способа включения обмоток якоря. Например, если питать фазы обмотки якоря однополярными импульсами, то за счет постоянной составляющей тока в машине возникает неподвижное в пространстве магнитное поле, намагничивающее ротор. Следовательно, при соответствующей схеме питания обмоток возбуждения реактивный шаговый двигатель может работать как двигатель с подмагничиванием.
Индукторные шаговые двигатели с подмагничиванием имеют несколько лучшие характеристики, чем реактивные — больший электромагнитный момент, лучшую устойчивость и т. п. Однако для них требуется более сложный электронный коммутатор, который загружается постоянной составляющей тока возбуждения. Наличие постоянной составляющей тока в обмотке якоря двигателя приводит к возрастанию электрических потерь мощности. Максимальная частота подачи управляющих импульсов тока у двигателей с подмагничиванием меньшая, чем у реактивных.
 | Рис. 7.18. Рабочие характеристики шагового двигателя |
Режимы работы шаговых двигателей. Для работы шагового двигателя характерным является регулирование частоты вра-щения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
Статический режим — это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента М от угла рассогласования θ близка к синусоидальной (рис. 7.18, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1,5°, статическая ошибка составляет не более 0,5°.
Квазистационарный режим — это режим отработки единичных шагов, например в приводах различных стартстопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки О и О' на рис. 7.18, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная — при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся резким — это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f0, угловое перемещение ротора при каждом шаге, как и квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
(7.17)
f0 ≈ 0,135√Mmax p /(Jр + Jн ),
где Mmax — максимальный электромагнитный момент при неподвижном роторе; Jp и Jн — моменты инерции ротора и нагрузки, приведенной к валу ротора. При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн /Mmax ≤ 0,3 ÷ 0,5, Jн /Jp ≤ l ÷ 2 и имелось внутреннее или внешнее; демпфирование. Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т. е. dθ/dt:
(7.18)
М = Мсн + Мт = Mmax sin θ + Ddθ/dt.
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т. е. тормозной момент Мт в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия, вращающегося потока ротора с током в обмотке якоря (см. § 7.2). У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Хd - Xq) обмотки якоря и ее активного сопротивления Ra .При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы — основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основным требованием, предъявляемым к шаговым двигателям в переходных режимах, является сохранение синхронизма при изменении частоты управляющих импульсов — отсутствие потери шага.Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр , при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя — максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр =100 ÷ 1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага) составляет (0,2 ÷ 0,5)fпр . Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
Рабочие характеристики шаговых двигателей. Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основными характеристиками являются: статическая, предельная механическая и предельная динамическая характеристики приемистости.
Статическая характеристика — это зависимость электромагнитного момента М от угла θ (рис. 7.18, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика — это зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 7.18,б, кривая 1). Ее снимают при плавном увеличении частотыf1.
Предельная динамическая характеристика приемистости — это зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки М (рис. 7.18,б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
Области применения. При высоких частотах вращения (2000—3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0,1 ÷ 10 Н•см, угловой шагαш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1 ÷ 25 Н•см, а угловой шаг αш = 1,5 ÷ 3°.
Читайте также:
lektsia.com
ОП ИСАНИ Е
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (t i! 650I95
Союз Советских
Социалистических
Республик (61) Дополнительное к авт. свид-ву (22) Заявлено 23.06.76 (21) 2376652/24-07 с присоединением заявки № (23) Приоритет (43) Опубликовано 28.02.79. Бюллетень № 8 (45) Дата опубликования описания 28.02.79 (51) М. Кл.
Н 02Р 8/00
Государственный комитет по делам изобретений и открытий (53) УДК 621.313.13-133 (088.8):
: 62-83 (72) Авторы изобретения
В. Ш. Арутюнян и В. А. Туманян (71) Заявитель (54) МНОГОРЕЖИМНЫЙ КОММУТАТОР
ДЛЯ ЧЕТЫРЕХФАЗНОГО ШАГОВОГО ДВИГАТЕЛЯ
Изобретение относится к электротехнике и может быть использовано для управления четырехфазными щаговыми двигателями с переменной величиной шага и числом одновременно коммутируемых фаз.
Известны многорежимные коммутаторы для управления щаговыми двигателями, содержащие триггеры, охваченные двумя системами перекрестных связей соответственно для прямого и обратного порядка коммутации фаз двигателя, логические элементы И, ИЛИ и шины .выбора режима коммутации (1), Наиболее близким по технической сущности является многорежимный коммутатор для четырехфазного шагового двигателя, содержащий тактовую шину и шины выбора режима работы, связанные с источником постоянного напряжения, четыре триггера с двумя информационными входами и с внутренней задержкой переключения, охваченные двумя системами перекрестных связей, построенных на логических элементах ИЛИ вЂ” И, одни входы которых подключены к шинам задания режима, другие входы — к единичным и нулевым выходам всех триггеров, а выходы — к информационным входам триггеров (2).
Установка триггеров в требуемые для каждого отдельного режима исходные состояния в известных устройствах осуществляется вручную или с помощью дополнительных органов управления, что усложня5 ет устройство и управление им, а также увеличивает время подготовки к каждому режиму коммутации фаз.
Целью изобретения является упрощение управления и сокращение времени, необхо10 димого для подготовки устройства к каждому отдельному режиму переключения фаз.
Поставленная цель достигается тем, что устройство, согласно изобретению, содер15 жит два диодно-резистивных ключа, разделительные диоды, элемент И-НЕ и три тиристорно-резистивных ключа, выходы которых через разделительные диоды подключены к единичным и нулевым выходам
20 триггеров, а входы через дифференцирующие элементы и разделительные диоды связаны с выходами диодно-резистивных ключей и элемента И-НЕ, включенных между двумя шинами выбора режима и
25 минусовой клеммой источника постоянного напряжения.
Такое выполнение многорежимного коммутатора для четырехфазного реверсивного шагового двигателя упрощает управле30 ние и позволяет автоматически задавать и
650195 изменять режимы коммутации с минимальной затратой времени на подготовительные операции.
11а чертеже приведена структурно-принципиальная схема предлагаемого многорежимного коммутатора фаз для четырехфазного шагового двигателя.
Коммутатор содержит триггеры 1, 2, 3 и
4, двухвходовые логические элементы ИЛИ
5, одни входы которых подключены к шести шинам, Упр. 1, Упр. 2, Упр. 3, Упр. 4, Упр. 5 и Уп р. 6 выбора режима коммутации, а другис входы — к единичным и нулевым выходам 6 и 7 соответственно триггеров. Пяти входовые логические элементы
И8 подключены одним своим входом к тактовой шине Т, а други>ми — к выходам элементов ИЛИ 5 и выходам 6, 7 триггеров, соединенных своими информационными входами 9 и 10 с выходами элементов
И 8.
Между минусовой клеммой источника питания Е„и двумя шинами Упр. 2 и Упр. 5 выбора режима, потенциалами на которых определяется необходимое для данного режима число одновременно включаемых каналов, включены два диодно-резистивных ключа 11, 12 и логический элемент ИНЕ 13. Выходы этих элементов подключены через дифференцирующие цепочки 14, 15, 16 и последовательно соединенные с ними разделительные диоды 17, 18 и 19 и входам тиристорно-резистивных ключей 20
21 и 22. Выходы последних подключены через группы из трех разделительных диодов
23 и 24 и 25 к соответствующим (единичным и нулевым) выходам триггеров всех разрядов.
Коммутатор работает следующим образом.
Перед началом работы каждого из семи возможных режимов коммутации фаз (c прямыми и обратными порядками переключения) на шинах Упр. 1 — Упр. 6 устанавливаются необходимые (согласно приведенной таблице) положения управляющих органов (например, тумблеров).
Задание режимов коммутации фаз осуществляется с помощью подачи определенных уровней напряжения на шины выбора режима. Двоичные коды управления отдельными режимами коммутации приведены в таблице для определенных чисел заходов ($), тактности (V) и одновременно включенных фаз (и и п. анс).
При этом, если задается любой из симметричных режимов (с прямым или обратным порядком) с и= l или один из несимметричных однозаходных режимов с S=l и п„ кс — — 2 (при котором через один такт меняется число одновременно включенных фаз с одного на два, и наоборот) и в соответствии с этим орган управления шиной
Упр. 2 устанавливается в единичное состояние (минус Е„), а орган управления ши5
ЗО
4 ной Упр. 5 — в нулевое состояние (нулевой потенциал), то при включении источников питания под напряжением оказывается диодно-резистивный ключ 11. После включения напряжения минус Е„в его средней точке формируется положительный перепад напряжения, преобразуется последовательно соединенной дифференцирующей цепочкой 14 в положительный импульс, поступающий через разделительный диод 17 к управляющему электроду тиристорного ключа 20. Тиристорный ключ открывается, и на его выходе возникает нулевой потенциал. Благодаря этому к коллекторам транзисторов определенных выходов триггеров 1, 2, 3 и 4 прикладывается через группу разделительных диодов 23 нулевой потенциал и осуществляется коллекторный запуск запертых транзисторов. В результате этого триггеры 1, 2, 3 устанавливаются в нулевые состояния, а триггер 4 — в единичное. Открывшиеся транзисторы триггеров шунтируют анодно-катодный переход тиристора и выключают его. В таком выключенном состоянии он остается до тех пор (и при этом не оказывает влияния на переключение триггеров), пока не произведется повторное включение напряжения минус Е„(после его выключения) или же повторное изменение потенциала на Упр. 5 с минус Е на нуль (что может иметь место при изменении режимов коммутации фаз).
Группа элементов 12, 16, 19, 22 и 25 срабатывает аналогично описанным, ранее элементам 11, 14, 17, 20 и 23 при подаче на шины Упр. 2 и Упр. 5 управляющего кода 01, т. е. при задании одного из симметричных режимов п=3 или одного из несимметричных однозаходных режимов с
5=1 и п ак =3. При этом триггеры 1, 2, 3 устанавливаются в единичные, а триггер
4 — в нулевое исходные состояния.
При подаче же на Упр. 2 и Упр, 5 кода (11), что соответствует симметричным режимам с п=2 и несимметричным трехзаходным режимам с S = 3> пмакс = 2 пиакс= 3, запускается инверторный каскад элемента И вЂ” НЕ 13 и на коллекторе его транзистора появляется нулевой потенциал.
Дальнейшее функционирование группы элементов 15, 18, 21 и 24 происходит аналогично описанным выше группам элементов 14, 17, 20, 23 и 16, 19, 22 и 25. При этих режимах триггеры 1 и 2 устанавливаются в единичные, а триггеры 3 и 4 — в нулевые исходные состояния.
Таким образом, при каждом из всех возможных режимов коммутации фаз четырехфазного реверсивного шагового двигателя обеспечивается автоматическая установка триггеров в требуемые исходные состояния.
В каждом режиме коммутации фаз в процессах переключений триггеров участвуют те элементы ИЛИ 5, на входы кото050195
Таблица
Режим коммутации
Код управления
Порядок переключения фаз
n/è„
С/Н S
Упр. б
Упр. 3
Упр. 5
Упр. 4
Упр. 2 Упр. 1 прямой обратный х х х
Р.
О и и х
v прямой обратный прямой обратный прямой обратный прямой ох ,О х х х
О.
1»
О
Я
И х о
Ю обратный прямой обратный прямой обратный рых по шинам Упр. 1 — Упр. 6 приложены нулевые уровни потенциалов. В зависимости от совокупности состояний триггеров в каждом такте получают «разрешения» определенные логические элементы И8, и тактирующие прямоугольные сигналы отрицательной полярности, проходя через них, устанавливают триггеры в соответствующие состояния. Тем самым в каждом такте обеспечиваются потактные взаимные 10 синхронные переключения триггеров в соответствии с заданным режимом.
Выполнение коммутатора согласно изобретению упрощает управление при задании и изменении режимов переключения 15 обмоток четырехфазного двигателя и значительно ускоряет процесс его подготовки к работе.
Формула изобретения
Многорежимный коммутатор для четырехфазного шагового двигателя, содержащий тактовую шину и шины выбора режима, связанные с источником постоянного напряжения, четыре триггера с двумя информационными входами и с внутренней задержкой переключения, охваченные двумя системами перекрестных связей, построенных HB логических элементах ИЛИ вЂ” И, одни входы которых подключены к шинам выбора режима, другие — к единичным и нулевым выходам всех триггеров, а выходы — к информационным входам триггеров, отличающийся тем, что, с целью упрощения управления и сокращения времени подготовки к каждому режиму переключения фаз, содержит два диодно-резистивных ключа, разделительные диоды, элемент
И-НЕ и три тиристорно-резистивных ключа, выходы которых через разделительные диоды подключены к единичным и нулевым выходам триггеров, а входы через дифференцирующие элементы и разделительные диоды связаны с выходами диод650195
Составитель 3. Горник
Техред Н. Строганова
Редактор Б. Герцен
Корректоры: P. Беркович и А. Степанова
Заказ 2709/7 Изд. № 158 Тираж 865 Подписное
НПО Государственного комитета СССР по делам изобретений и открытий
113035, Москва, К-35, Раушская наб., д. 4/5
Типография, пр. Сапунова, 2 но-резистивных ключей и элемента И-1-1Е, включенных между двумя шинами выбора режима и минусовой клеммой источника постоянного напряжения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 377950, кл. Н 02Р 7/58, 1973.
2. Авторское свидетельство СССР по заявке № 2082134/24-07, кл. Н 02Р 8/00, 5 1975.




www.findpatent.ru
Изобретение относится к автоматике, а именно к системам управления с шаговыми двигателями. Целью изобретения является повышение надежности путем исключения сбойных ситуаций вследствие ошибок оператора. Коммутатор содержит генератор 1 импульсов, двоичный счетчик 2, реверсивный двоичный счетчик 3, блок памяти 4, первый 5 и второй 6 элементы ИЛИ, многоканальный выходной усилитель 7, тактовую 8 шину, шину управления 9, шину реверса 10, шину выбора режимов коммутации 11, 12 и 13, шину 14 включения шагового двигателя, первый 15 и второй 16 элементы И-НЕ, первый 17 и второй 18 инверторы, первый 19 и второй 20 элементы И. 1 ил.
СООЗ COBETCHHX
ССЩИАЛИСТИЧЕСНИХ
РЕСПУБЛИН (5l)5 G 05 В 19 40
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
rlO ИЗОБРЕТЕНИЯМ И ОТИРЫТИЯМ
ПРИ ГННТ СССР (61) 1471 1 75 (21) 4463529/24-24 (22) 19 ° 07.88 (4e) 23.03.90. Еюл. М- 11 (71) Специальное конструкторско-технологическое бюро с опытньм производством при Белорусском государственном университете им.В.И.Ленина (72) В.В. Нижникою, Б.Д.Телегин, И.Н.Рудоц и В.И.Лакизо (53) 621 . 503. 55 (088. 8) (56) Авторское свидетельство СССР
Ф 1471175, кл, С 05 В 19/40, 1987.
Анторское свидетельство СССР по заявке ll 4298718/24-24, кл, G 05 B 19/40, 28.08.87. (54) КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ РАГОВЬ1М ДВИГАТЕЛЕМ
ÄÄSUÄÄ 1552149 А 2
2 (57) Изобретение относится к автоматике, а именно к системам управления с шаговыми двигателями. Цельш изобретения является повышение надежности путем исключения сбойных ситуаций вследствие ошибок оператора. Коммутатор содержит генератор l имцульсон, двоичный счетчик 2, реверсинный двоичный счетчик 3, блок памяти 4,первый 5 н второй 6 элементы ИЛИ, многоканальный выходной усилитель 7, тактовую
8 шину, шину управления 9, шину реверса l0, шины выбора режимов коммутации 11, 12, и 13 и шину 14 в
552149
Изобретение относится к автоматике, а именно к системам управления с щаговыми двигателями и является усовершенствованием изобретения по ант.св. N - 47! 175.
Белью изобретения является повь|шение надежности путем исключения сбойных ситуаций вследствие ошибок оператора. 1О
На чертеже представлена блок-схема предлагаемого коммутатора для управления шаговым двигателем (ШД) .
Коммутатор дпя упранления шаговым двигателем содержит генератор 1 им- 15 пульсов, двоичный счетчик 2 и ревер,синный двоичный счетчик 3, блок 4 памяти, первый 5 и второй 6 элементы
ИЛИ, многоканальный выходной усилитель 7, тактовую шину 8., шину 9 уп- 20 равления, шину 0 реверса, шины 1 -13 выбора режима коммутации, шину 14 включения ЩЦ, первый 15 и второй !6 элементы И-НГ, первый 17 и второй 18 инверторы, первый 19 и второй 20 зле- 25 менты И.
Компаратор работает следующим образом.
Тактовые импульсы, поступающие на тактовую шину 8 коммутатора, подаются на разрешающий вход генератора .! импульсов и вход установки нуля двоичного счетчика 2.
По переднему Фронту каждого поступающего импульса генератор 1 импульсов запускается и вырабатывает последо35 вательность импульсов с частотой, превышающей частоту следования тактовых импульсов и определяемой как контролируемой длительностью тактового импульса, так и емкостью двоич—
I ного счетчика 2, разрешение на счет которому выдается также по переднему фронту поступающего по тактовой шине ,импульса, так что на тактовый вход реверсивного двоичного счетчика 3 импульс переноса с выхода двоичного счетчика 2 поступит только в том случае, есть длительность импульсов на тактовой шине соответствует заданной.
По заднему Фронту импульса, поступившего по тактовой шине, двоичный счетчик 2 обнуляется, а генератор,, 1 прекращает вырабатывать последовательность импульсов заданной частоты.
С приходом нового импульса вышеописанный процесс повторяется, обеспечивая пропускание на тактовый вход реверсивного двоичного счетчика 3 толь ко так товых импульсов заданной длительности и блокировку помеховых сигналов в составе пакетов помех, с длитель нос тью меньше з ада нног о з начения.
1!ри подаче на шину 9 управления потенциального сигнала разрешения счета реверсивный двоичный счетчик 3 отсчитывает поступающие на его тактовый нход импульсы, при этом записываемое в счетчик 3 двоичное число с каждым тактовым импульсом увеличивается или уменьшается на единицу, в зависимости от уровня потенциального сигнала на шине реверса 10, т.е. на входе для задания направления счета, в то время как коэффициент пересчета реверсивного двоичного счетчика 3, определяемый типом используемого шагового двигателя и режимом коммутации его обмоток, Формируется (с учетом логической единицы на первом инФормационном входе реверсивного двоичного счетчика 3) с помощью первого
15 и второго 16 элементов И-НЕ, первого 17 и второго 18 инверторов, а также второго элемента 20 И из соответствующих потенциальных сигналов
1 подаваемых на шины 12 и 13 выбора режима .коммутации. Из этих же сигналов, а также из сигналов, снимаемых с выходов третьего и четвертого разрядов реверсивного двоичного счетчика 3, с помощью первого элемента И !
9Ä первого 5 и второго 6 элементов
ИЛИ одновременно формирук тся третий, четвертый и пятый разряды адресного кода блока 4 памяти, первый и второй! разряды которого задаются непосредственно состояниями выходов первого и второго разрядов реверсивного двоичного счетчика 3. Поступая на адресные входы блока 4 памяти и изменяясь,по каждому тактовому импульсу, этот адресный код обеспечивает нри подаче разрешающего потенциального сигнала низкого уровня:на шийу включения шагового двигателя 14 (т.е. на разрешающий вход блоха 4 памяти) ньг борку из блока 4 памяти кодовых комбинаций, соответствующих заданному режиму коммутации Фаз выбранного шагового двигателя. Распределение
-памяти н блоке 4 для использования его в предлагаемом коммутаторе и зависимость модуля счета реверсивного двоичного счетчика 3 и адресного кода н (десятичной системе) от потенци5 1 5521 альных сигналов на шинах 12 и 13 предс тавлены в таблице .
Как модуль счета реверсивного двоичного счетчика 3, так и адресное 5 поле блока 4 памяти задаются соответственно типу ШД и режиму коммутации
его фаз всего лишь двумя потенциальными сигналами на шинах 12 и 13 выбора режима коммутации. 10
При изменении уровня потенциального сигнала на шине IO реверса адресные коды меняются в обратной последовательности, обеспечивая считывание записанной в блоке 4 памяти информации в обратном порядке и тем самым обработку реверса шагового двигателя и его вращение в противоположном направлении.
При подаче потенциального сигнала запрета счета на шину 9 управления реверсивный двоичный счетчик оста:навливается с сохранением информации благодаря чему обеспечивается фиксированная стоянка шагового двигателя.
Если в данном режиме на шину 14 включения ШД подать запрещающий потенциальный сигнал высокого уровня, то на всех выходах блока 4 памяти, независимо от состояния адресных входов, появятся сигналы одинакового (высокогo) уровня, обеспечивающие запирание многоканального выходного усилителя 7 и тем самым обесточивание обмоток шагового двигателя с сохранением информации о состоянии коммутатора. Этот режим эФфективен, к примеру, при необходимости продолжительных остановок шагового двигателя. в процессе работы без потери информации.
Таким образом, предлагаемый коммутатор в сравнении с известным обладает более высокой надежностью обес%
45 печивая однозначное соответствие
49 б между информацией, подаваемой на информационные входы реверсивного двоичного счетчика, и сочетаниями потенциальных сигналов на шинах выбора режима коммутации, причем задание режима работы соответственно типу выбранного ШД и режиму коммутации
Фаз выполняется путем подачи потенциальных сигналов всего лишь на две шины выбора режима коммутации при одновременном исключении причин сбойных ситуаций-, возможных у,известного коммутатора вследствие ошибок опсратора.
Формула изобретения
Коммутатор для управления шаговым двигателем по авт . св . М I 4?! 1 75, отличающийся тем, что, с целью повышения надежности путем исключения сбойных ситуаций вследствие ошибок оператора, в него дополнительно введены первый и второй элементы
И вЂ” НЕ, первый и второй инверторы, пер.— вый и второи элементы И, причем выход первого элемента И является первой шиной выбора режима коммутации, первый вход первого элемента И подключен к второй шине выбора режима коммутации, к первым входам первого и второго элементов И-HE и к входу первого инвертора, подключенного выходом к первому входу второго элемента И, второй вход которого подключен к третьей шине выбора режима коммутации, к вторым входам первого элемента И-НЕ, первого элемента И и к входу второго инвертора, причем первый информационный вход реверсивного двоичного счетчика подключен к шине.высокого потенциала, второй информационный вход — к выходу второго элемента И-НЕ, третий информационный входк выходу второго инвертора, четвертый — к выходу второго элемента И.
l 552149
Модуль
Д счета
Адрес блока
4 паШины
13 12
Информационные входы счетчика
Режим работы и тип ШД мяти
8 0-7 BOCbMHVGKTHBH коммутация четырехфазного ШД
1†- 12-2-23-3-34-4-4!
6 8-13 Шеститактная коммутация трехфазного ШД
1-! 2-2-23-3-31
12 16-27 Двенадцатитактная коммутация шестифазного ШД
12-123-23-234-34-34545-456-56-561-61-612
4. 28-31 Четырехтактная коммутация четырехфазного ШД
12-23-34-41
0 0
0 ll 0
0 1 1
Сос тавитель И. Слинько
Техред д,Олийнык Корректор М.Пожо
Редактор В, Бугренкова
Заказ 329 Тираж 672 Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина, 101




www.findpatent.ru
_#_. 81278
Нласс 21с, 46о!
21d, 17
74с, 3
СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИ4Е . В. Гаврилов
ИОЫМУТАТОР ДЛЯ ШАГОВОГО ЭЛЕНТ
Заявлено 1 апреля 1948 r. за ¹ 379478 в Комитет по изобретениям и открытиям при Совете Министров СССР
Опубликовано в «Бюллетене изобретений.> № 4 за 1950 r.
Изобретение касается коммутаторов для шагового электродвигателя с безобмоточным железным якорем.
Прерыватели, применяемые для коммутации шаговых электродвигателей, имеют существенные недостатки.
1, контакты прерывателей подвержены вибрациям, что приводит к ускоренному износу и ooropazIIIO, уменьшает к..п.g. двигателя, снижает скорость и вра!цающий мя!ент. Виорация контактов прерывателя осооенно вредна в быстроходных двигателях (о000 об а!!гн. и выше).
2. Регулировка контакто весьма затруднена. Временные парве!етры прерывателя очень сильно зависят от контактного давления, а также от формы и износа, в ех деталей прерывателя (кулачков шайоы, самих гонтактов, контактных Ilp)жин и их лапок). Величина перекрытия опреде.ляется главным образом сочетанием допусков и для различных двигателей различна.
Предлагаемый кммутатор выполняется по типу цилиндрического пли уискового колл ктора со щетками и своооден от указанных г "достатков. Отличительной осооенностью коммутатора является наличие в нем контактных пластин в количестве, равном числу полюсов якоря, и трех щеток, из которых средняя чвляется токоподводятцей, а крайние приключены к разным обмоткам статора и поочередно подключаются к средней щетке, благодаря чему цепи коммутации проходят через две последовательно включенные щетки.
В видоизмененной! конструкции коммутатор выполняется неподвижным, а щетки вращающимися. Пластины коммутатора разделены на две группы, одна из которых служ гг для подвода ток". а другая pëI! коммутацгги обмоток статора двигателя.
На фпг. 1 изображен предлагаемый коммутаTup; на фиг. 2 — его элекгрпч— сная схема включения; на фиг. 3 — 7 показаны разл,!ч ые модификации подобного коз!!!утатора; на фиг. 8 — 12— разтичные 1!одифпкацггп кот!мутатора BI!доизмененноп конструкции.
На фпг. 1 схематически представлена конструкция кол!!!утатора с неподвижными угольными пласгинамп-щетками (0,1 и
2). Колле!!тор состоит пз двух медных полуцит!гндрпческих пластин-щеток (3) и (4), охватыва!ощпх изоляционную втулку (5), насаженну!о на вал (G) двигателя.
Угольные щетки ооычной копструкцп!! прижимаются к цилиндрической поверхности такого коллектора. Щетки смещены одна относительно другой на 90 . Прн вращении вала двигателя вместе с к.оллектором щетка (О) на пвотяженпп RKдой четверти ouopoòà попеременно соединяется через соответстгующуго половину коллектора с пластинами-и!еткамп (1) II (2), чем обеспечивает требуемый процесс коммутации обмоток статора двигателя.
Эй 81278
Схема подключения такого коммутатор а к обмоткам (И1) и (М2) шагового двигателя, представленная на фпг. 2, не требует пояснений.
Все три щеткодержателя коммутатора должны быть укреплены на общем основании, могущем поьорачпваться в некоторых пределах вокруг оси двигателя.
Зтим обеспечивается регулировка фазы установки щеток. Вторым регутировючньи параметром коммутатора является установление требуемого давления щеток на коллектор. Оно производится индивидуально для каждой щетки, в зависимости ог конструкции щеткодержателя.
Вместо угольных щеток могут быть использогапы металлические. Такой коммутатор представлен на фпг. 3. Щетки (контактные пру кнны) выполняются Н3 листовой бронзы с массивнымп контактами, например, из твердого сплава серебра, или с шариковыми контактами. Контактныс пружины могут иметь расщеп и двойные контакты, как это показано на фиг. 4.
Коммутатор может оыть выполнен по типу дискового. Коллектор в этом случае имеет форму тонкой шайбы, а щетки могут быть пли односторонними (угольные или металлические), или двухсторонними (металлнческие). Такой дисковый коллектор представлен на фиг. 5 и 6.
Во всех рассмотренных конструкциях коллектора предполагается, что шаговый двигатель имеет двухполюспый якорь. Ыетрудпю видеть, что по тем ze принципам могут быть построены коллекторы и для двигателей с многополюснымп якорями.
Так, на фиг. 7 схематически представлен коммутатор с угольными щетками к двигате;по с трехполюсным якорем. КолпчесТВо секций коллектора должно оыть равно числу полюсов якоря двигателя.
Вместо неподвижных щеток могут ныть применены вращающиеся. Так, на фиг. 8 представлен коммутатор, имеющий неподвижный цилиндрический коллектор с вращающимися угольны!ги щетками. Обойма (5) (нз изоляционного материала) наса кена на вал двигателя. В диаметральном канале обоймы лежат две угольных пластины-щетки (3) и (4), раздвигаемые пружиной (6) и соединенные через нее электрически. Для улучшения контакта гцеток между собою внутренняя поверхность канала может быть металлической.
Щетки скользят по внутренней цилиндрической поверхности неподвижного коллектора, образованной тремя пластинамищетками (0,1 и 2).
По этому же принципу может оыть построен коммутатор с металлическими щетками (двухсторонними или одностовонними, с одинарными или двийнйми контактааги). Принцип устройства таюихкоммутаторов представлен на фиг. 9 — для двигателя с двухполюсным якорем, а на фиг. 10 — p.IH двигателя с четырехполюсным якорем. В оооих случаях пластина-щетка (О) занимает половину окружности, вторая половина окружности подразделяется на столько частей, сколько полюсов и.ICCI якорь двигателя. Щетка (3) при работе двигателя обеспечивает необходимую коммутацию.
На фиг. 11 представлена конструкция коммутатора с полуколлекгором для шаговых двигателей с вращающимися электромагнитами.
Характерной осооенностью рассмотренных конструкций является то, что цепи коммутации проходят через две щетки, Goедпненные последовательно.
Повышение надежности коммутации может быть ооеспечено применением металлических щеток с двойными контактами или щеток, охватывающих секцию коммутатора с двух сторон (фиг. 4, 6, 9, 10 и 11). Могут применяться также сдвоенные щетки, как это показано на фпг. 12.
Рассмотренными примерамп принципиального устройства коммутаторов к шаговым двигателям не исчерпываются все возможные решения. Однако в конкретHbIx случаях применения онн позволяют наметить основы конструкции коммутатора, которая, наилучшим соразом удовлетворяла ohI поставленным требованиям и была свободна от недостатков сущсствующпх конструкций коммутаторов.
Предмет изобретения
1. Коммутатор для шагового электродвигателя с безобмоточным железным якорем, выполненный по типу цилиндрического или дискового коллектора, на который наложены неподвижные щетки, отли ча ю щи и с я тем, что:на коммутаторе расположены изолированные контактные пластины в количестве, равном числу полюсов якоря, служащие для ïcреключенпя трех щеток, пз которых ср дняя является токоподводящей, а край ие приключены к разным обмоткам статора и поочередно подключаются пластинами коммутатора к средней щетке, благодаря чему цепи коммутации проходят через две последовательно включенные щетки.
2. Видоизменение коммутатора по п. 1, о т 1 и ч а Io щ е е с я тем, что контактные пластины неподвижного коммутатора разделены на две группы, занимающие по половине окружности и служащие — одна для подвода тока, а другая для коммутации обмоток статора, осуществляемой
М 81278
Фиг. 1
Фиг. 2
Фиг. 3
Фиг. 5
Фиг. 4
Фиг. 6 хвумл диаметрально расположенными и электрически соединенными вращающимиси щетками.
3. В коммутаторе пе пп. 1 и 2 применение двойных щеток, включенных параллельно.
Фиг. 7
Фиг. 9
Фиг. 10
Фиг. 12
Фиг. 11
Ст. редактор А. A. Сержпинская
Стаидартгиз, Подп. в печ. 13/Х1 1956 г. Объем 0,25 п, л. Тираж 400. Цена 50 коп.
Типография изд-ва «Московская правда, Потаповский пер., 3, Зак. 5424




www.findpatent.ru
Изобретение относится к автоматике и может быть использовано для управления шаговыми двигателями ирподнительных устройств автоматизированной системы управления. Цель изобретений - повышениенадежности работы. Коммутатор содержит генератор 1 импульсов, двоичный 2 и двоичный реверсивный 3 счетчики, блок 4 памяти, первый 5 и второй 6 элементы ИЛИ, многоканальный выходной усилитель 7, тактовую шину 8, шины управления 9. выбора коэффициента пересчета 10, реверса 11, выбора режимов коммутации 12 ("Режим 1"), 13 ("Режим И"). 14 ("Режим HI"), включения 15, шагового двигателя (ШД). Новым является введение элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16, одновибратора 17, RS-триггера 18 и связей. Отличительные признаки позволяют повысить надежность работы, исключить возможность появления аварийной ситуации. 3 ил.•^
СОЮЗ СОВЕТСКИХ
СОЦИАЛИСТИЧГ СКИХ
РЕСПУБЛИК (я)ю 6 05 В 19/40
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ й
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) 1471175 (21) 4793428/24 (22) 16.02.90 (46) 30,01.92. Бюл. 3Ф 4 (7.2) В.Д. Ефременко (53) 621,503.55(088,8) (56) Авторское свидетельства СССР
М 1471175, кл. 6 05 В 19/40, 1987. (54) КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ (57) Изобретение относится к автоматике и может быть использовано для управления шаговыми двигателями исполнительных устройств автоматизированной системы управления. Цель изобретения — повышение
»- Ж 1709271 А2 надежности работы. Коммутатор содержит генератор 1 импульсов, двоичный 2 и двоичный реверсивный 3 счетчики, блок 4 памя ги, первый 5 и второй 6 элементы ИЛИ, многоканальный выходной усилитель 7, тактовую шину 8, шины управления 9, выбора коэффициента пересчета 10, реверса 11, выбора режимов коммутации 12 (" Режим 1"), -13 (" Режим И"), 14 (" Режим ИГ), включения 15, шагового двигатеЛя (ШД}. Новым является введение элемента ИСКЛНЭЧАОЩЕЕ ИЛИ
16, одновибратора 17, RS-триггера 18 и связей. Отличительные признаки позволяют повысить надежность работы, исключить возможность появления аварийной ситуации. 3 ил.
1709271
Изобретение относится к автоматике и может быть использовано для управления шаговыми двигателями исполнительных устройств автоматизированной системы управления.
Известен коммутатор для управления шаговым двигателем, содержащий генератор импульсов, двоичные и двоичный реверсивный счетчики, блок памяти, первый и второй элементы ИЛИ, многоканальный выходной усилитель, тактовую шину, шины управления, выбора коэффициента пересчета
{модуль счета), реверса, шины выбора режимов коммутации, шину включения шагового двигателя, Недостатком известного коммутатора является невысокая достоверность функционирования, обусловленная его схемным решением.
Цель изобретения — повышение надежности работы.
Это достигается тем, что в известный коммутатор введены элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, RS-триггер и одновибратор, соединеный входом с тактовым входом реверсивного двоичного счетчика, а инверсным выходом — с S-входом триггера, R-вход которого соединен с тактовой шиной устройства, при этом разрешающий вход генератора импульсов соединен с тактовой шиной через элемент ИСКЛЮЧАЮЩЕЕ
ИЛИ, второй вход которого соединен с выходом RS-триггера.
На фиг. 1 показана схема предлагаемого коммутатора; на фиг, 2 — таблица варианта программирования блока памяти для предлагаемого коммутатора и зависимость двоичного адресного кода от потенциальных сигналов на шинах выбора режима коммутации и от модуля счета реверсивного двоичного счетчика для случая прямого счета; на фиг. 3 — эпюры работы коммутатора при формировании импульса на тактовом входе реверсивного счетчика.
Коммутатор для управления шаговым двигателем содержит генератор 1 импульсов, двоичный счетчик 2, реверсивный двоичный счетчик 3, блок 4 памяти, первый 5 и второй 6 элементы ИЛИ, многоканальный выходной усилитель 7, тактовую шину 8, шины управления 9, выбора коэффициента пересчета (модуль счета) 10, реверса 11, выбора режимов коммутации — "Режим I"
12, "Режим II" 13, "Режим III" 14, включения
15 шагового двигателя, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 16, одновибратор 17, RS-триггер 18.
Тактовая шина 8 соединена с разрешающим входом генератора 1 и R-входом счетчика 2 через элемент 16, выход генератора
45
1 соединен с С-входом счетчика 2. выход которого соединен с входом одновибратора
17 и тактовым С-входом счетчика 3, первый и второй выходы которого соединены с первым и вторым адресными входами непосредственно, а третий и четвертый выходы— через элементы ИЛИ 5 и 6 — с третьим и четвертым адресными входами блока 4, пятый адресный вход и вход V которого соединены с шинами 14 и 15 соответственно, а выходы — с входами усилителя 7. выходы которого соединены с соответствующими обмотками шагового двигателя. Шина 9 соединена с входом разрешения счета счетчика,3, а шины 10 и 11 — с соответствующими входами счетчика 3, шины 12 и 13 — с вторыми входами элементов ИЛИ 5 и 6 соответственно, инверсный выход одновибратора 17 — с S-входом триггера 18, прямой выход которого соединен с вторым входом элемента
16, а R-вход — с шиной 8. Коммутатор выполнен на микросхемах К155, К555.
Работа коммутатора начинается с выбора направления движения (прямой или обратный ход) шагового двигателя путем подачи потенциального сигнала соответствующего уровня (лог. "1" — прямой ход. лог.
"0" — обратный ход) на шину 11, выбора режима коммутации обмоток шагового двигателя путем подачи потенциального сигнала соответствующего уровня (лог, "0" или лог. "1") на шины 12-14 и шину 10. а также подачи низкого потенциального сигнала
{лог. "0") на шину 15, Тактовые импульсы, поступающие на тактовую шину 8, после подачи на шину 9 управления команды разрешения счета (лог.
"1"), подаются на первый вход элемента 16 (см. фиг. 3, эпюра 1). так как RS-триггер 18 сброшен по R-входу предыдущим низким потенциалом шины 8, то на втором входе элемента 16 — низкий уровень напряжения (см. фиг. 3, зпюра 2) и с выхода элемента 16 — на разрешающий вход генератора 1 и вход установки нуля двоичного счетчика 2 (см. фиг, 3. эпюра 3). По переднему фронту каждого поступающего тактового импульса генератора 1 начинает вырабатывать последовательность импульсов. частота которых больше частоты тактовых импульсов, и определяется как длительностью тактового импульса, так и емкостью счетчика 2, разрешение на счет которому выдается также по переднему фронту тактового импульса.
Пусть. например, частота импульсов генератора 1 выбрана таким образом. что в интервале времени, равном длительности тактового импульса (cM, фиг. 3. зпюра 1, им.
I), укладывается III периодов импульсов.
1709271
20
30
40
50
55 выдаваемых генератором 1 (см, фиг, 3, эпюра 4), в то время как на выходе двоичного счетчика 2, который может быть и выходом переноса, соответствующий импульс появляется после поступления десяти импульсов на его счетный вход с выхода генератора 1 (cM, фиг. 3, эпюра 5). Таким образом на тактовый вход счетчика 3 и вход одновибратора
17 импульс с выхода счетчика 2 (см. фиг. 3, эпюра 5) поступает только в том случае, если длительность импульса на тактовой шине устройства соответствует заданной, По заднему фронту импульса с выхода счетчика 2 (см. фиг. 3, эпюра 5) одновибратор на инверсном выходе формирует короткий отрицательный импульс (см. фиг..3, эпюра 6), который, поступая на S-вход триггера, устанавливает нэ его выходе, а, следовательно, и на втором входе элемента 16 высокий уровень напряжения (см. фиг. 3, эпюрэ 2), В результате на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 16 появляется низкий уровень (см. фиг, 3, эпюра 3), который подается на разрешающий вход генератора 1 и
R-вход счетчика 2 и запрещает их работу(см, фиг, 3, зпюра 4). По окончании тактового импульса (см. фиг. 3. эпюра 1) сбрасывается триггер 18. На выходе RS-триггера 18 и соответственно на втором входе элемента 16 устанавливается низкий уровень напряжения, т.е. устройство подготовлено для приема следующего тактового импульса на шине 8.. В паузе между тактовыми импульсами на шине 8 на выходе элемента 16— низкий уровень, который запрещает работу генератора 1 и счетчика 2.
С приходом нового тактового импульса по шине 8 (см. фиг. 3, эпюра 1, им. !) описанный процесс формирования импульса на выходе счетчика 2, а, следовательно, и нэ тактовом входе счетчика 3 повторяется, Предположим, что в силу неисправности устройства выдачи тактовых импульсов, на тактовую шину 8 поступает положительный перепад, т.е. тактовый импульс (см. фиг.
3, эпюра 1, имп. !!) с неограниченной длительностью. В этом случае процесс формирования импульса нэ выходе счетчика 2 и, следовательно, на тактовом входе счетчика
3 происходит так, как описано для нормального по длительности (см. фиг. 3, эпюра 1, имп. I) тактового импульса. После сформирования импульса на тактовом входе счетчика 3 и, следовательно, изменения на единицу записанного в счетчик 3 числа, прекращает работу генератор 1 и счетчик 2 за счет подачи низкого уровня напряжения с выхода элемента 16 в течение всего времени, пока не заканчивается тактовый импульс(см, фиг. 3, эпюра 1, имп. II) неограниченной длительности. Благодаря этому, исключается многократное изменение состояний счетчика 3 в течение тактового импульса неограниченной длительности и, следовательно, аварийная ситуация, присущая известному коммутатору, обеспечивается надежный контроль за положением шагового двигателя и тем самым повышается достоверность функционирования устройства, Счетчик 3 отсчитывает поступающие на его тактовый вход импульсы (см. фиг. 3, эпюра 5), при этом записываемое в счетчик 3 двоичное число с каждым тактовым импульсом увеличивается или уменьшается на единицу в зависимости от уровня потенциального сигнала на шине 11 реверса.
С учетом уровней сигналов на выходах счетчика 3 и потенциальных сигналов на вторых входах элементов 5 и 6, а также уровня потенциального сигнала на шине 14 на адресных входах блока 4 памяти формируется соответствующий двоичный код (см, фиг. 2), обеспечивающий считывание записанной в блоке 4 информации и, тем самым появление на выходах блока памяти кодовых комбинаций, соответствующих заданному режиму коммутации фаз выбранного шагового двигателя.
Так как на шину 15 подается низкий уровень напряжения, то указанные кодовые комбинации сигналов проходят через многоканальный усилитель 7 на соответствующие обмотки шагового двигателя и производят их коммутацию согласно выбранного режима (см. фиг. 2).
Зависимость двоичного адресного кода от потенциальных сигналов на шинах 12 — 14 и от модуля счета счетчика 3 (шинэ 10) и вариант программирования блока 4 памяти для предлагаемого коммутатора для случая прямого хода представлены в таблице (см. фиг. 2) где: Х вЂ” любое состояние, 0 — обмотка шагового двигателя включена, 1 — обмотка шагового двигателя обесточена.
Для обеспечения работы шагового двигателя в обратном направлении (реверсирование) на шине 11 изменяется уровень потенциального сигнала (лог, "0"). В этом случае адресные коды на входах блока 4 памяти меняются в обратной последовательности, обеспечивая считывание записанной в блоке 4 информации в обратном порядке и тем самым отработку реверса шагового двигателя и его вращение в противоположном направлении.
При подаче потенциального сигнала запрета (лог. "0") на шину 9 счетчик 3 останавливается, сохраняя информацию на своих
1709271
Таким образом, предлагаемый коммутатор обладает большей надежностью работы благодаря исключению появления на выходе счетчика 2 несанкционированной последовательности импульсов при появлении на
8 шине тактового импульса неограниченной длительности и, следовательно, многократного изменения состояния счетчика 3, т.е. исключает многократную перекоммутацию обмоток шагового двигателя в течение одного импульса.
В результате обеспечивается надежный контроль за положением шагового двигателя, исключается аварийная ситуация, тем самым повышается надежность, выходах, соответственно на адресных входах блока 4 памяти, благодаря чему обеспечивается фиксированная стоянка шагового двигателя. Подача в этом режиме высокого потенциала (лог. "1") на шину 15 устанавливает на выходах блока 4 памяти высокие уровни напряжения, независимо от состояния его адресных входов. В результате обмотки шагового двигателя обесточены.
Так как информация о состоянии коммутатора, о направлении движения и режимах коммутации сохраняется, то при подаче сигнала разрешения (лог. "1" на шину 9 и лог.
"0" на шину 15) шаговый двигатель начинает отработку из того же положения, в котором проходит его останов, 5
Формула изобретения
Коммутатор для управления шаговым двигателем по авт. св. М 1471175, о т л и ч аю шийся тем, что, с целью повышения надежности работы, в него введены элемент
ИСКЛЮЧАЮЩЕЕ ИЛИ, RS-триггер и одновибратор соединенный входом с тактовым входом двоичного реверсивного счетчика, а инверсным выходом — с S-входом RS-триггера, R-выход которого соединен с тактовой шиной устройства и первым входом элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, второй вход которого соединен с.прямым выходом
RS-триггера, а выход соединен с разрешающим входом генератора импульсов.
Поступающие на тактовой шине 8 помехи, которые могут носить как единичный характер, так и присутствовать в виде пакетов помех, причем длительность помеховых сигналов, как правило, существенно меньше длительности тактовых импульсов. блокируются счетчиком 2 и не проходят на тактовый вход счетчика,3. По окончании каждой помехи счетчик 2 обнуляется и пересчитывает каждую вновь поступившую помеху заново, пропуская твм самым на тактовый вход счетчика 3 только тактовые. импульсы заданной длительности, причем частота этих импульсов может изменяться в широких пределах, 20
30 ддпеп 793 9
ПРиигчйггне
ВГ
Рбнгим
Мадчль
ivers
ВХЛ
: ШД глкт
6ЧЗг Габ
06 0Ч РЗ 02 а ась мнтяктнлн канинтяцмя чптьюехтяктнатгаГ2
Г Г 2-2-2,3+ЗН-Нf штнтяктизз кпнннтяцнЯ тябуВЛВНПГО Шй г-f,г-г-z,ë; -з, Г
ДВ енядцлтнтяктнлу кппннтлиип шбатнжлзногг агА
Г;Е-Г,г,в-г, З-ей-З, 9-3,Н„5-Н,6.Я6 6, 6 Ебr.6 r-б r,г чб тыйхтятнаю
«аммнтяцня летн
РехОмзнОГВ ШД гг-z,ç-з, г-г,t
ШД ОЕЕсТО г6Рг г
2 з г
6 б
7 в г е
М
6 г г
З и
S а о а и
0 О о о а 0
О а а о
0 0 а
0 и о о г о а о
О о а
0
0 f г
D
О о
0 г г
О
0 д
r г г а о а о г г г о
0 г г
0 о г о
D г о а о
0 г о о г о о
f г и г
0 г
О г
0 г а
О г а г а г
f
0 г
О г
О г а г
Х х
Х х х
У х
Х х х х х г г
f г г г а о о
О
О х х
Х х
Х х
Х
Х
Х
У
Х
Х к к к
Х
Х г
r г г г
О
О о
0 а г г х
Х к г г
1 г г о
0 х х х х
r
О
0 о г г г г г г о
О г г
f а
О
О г г г г
О о о
1 о а
О а г г г г г
0
М о о г г г г г
О о
0 г г а
О
f г
r г г о а а г о г г г г
f о о о г г г
0 а о г г г г г а о д г г
1709271
I !
I фиг. 3
Составитель И. Слинько
Техред М,Моргентал Корректор М. Демчик
Редактор Т. Горячева
Заказ 424 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101





www.findpatent.ru