Технический персонал Боинга готовит гиродин CMG-1, для экипажа STS-93, который установит его на ферму Z1 МКС, и который впоследствии выйдет из строя. (Фото НАСА, 1998 год)
Технический персонал Боинга готовит гиродин CMG-1, для экипажа STS-93, который установит его на ферму Z1 МКС, и который впоследствии выйдет из строя. (Фото НАСА, 1998 год) Гиродин — механизм, вращающееся инерциальное устройство, применяемое для высокоточной стабилизации и ориентации[1], как правило, космических аппаратов (КА), обеспечивающее правильную ориентацию их в полёте и предотвращающее беспорядочное вращение. Гиродин — это двухстепенный управляющий силовой гироскоп, выступающий в роли гиростабилизатора; на КА он заменил более простые системы на базе двигателя-маховика[2].
Принцип работы гиродина заключается в создании гироскопического момента[3], действующего через опоры гироскопа. Действие этого устройства основано на законе сохранения момента импульса. Например, когда двигатель-маховик раскручивается в одну сторону, то КА, соответственно, начинает вращаться в другую сторону. Если под влиянием внешних факторов КА начал разворачиваться в определённом направлении, достаточно увеличить скорость вращения маховика в ту же сторону, чтобы он скомпенсировал момент («принял вращение на себя») и нежелательный поворот КА прекратится.
Двухстепенной гиростабилизатор, применяемый в космической промышленности США, носит название CMG от англ. control momentum gyroscope (буквально: гироскоп с управляющим моментом).
Чтобы гиродины были эффективны, они должны обладать большим моментом инерции, что предполагает значительную массу и размеры. Для крупных спутников силовые гироскопы могут быть очень велики. Например, три силовых гироскопа американской орбитальной станции «Скайлэб» весили по 110 кг каждый и вращались с частотой около 9000 об/мин. На Международной космической станции (МКС) гиродины — это устройства с размерами более метра по осям измерений и массой около 300 кг. Несмотря на значительную массу, использовать их всё же выгоднее, чем постоянно снабжать станцию топливом.
Если речь идёт о применении гиродинов в беспилотном аппарате, управление которого осуществляется дистанционно, то приоритетной становится высокоточная ориентация корабля, для обеспечения устойчивой дальней космической связи, осуществляемой с помощью узконаправленных параболических антенн.
Для стабилизации аппарата достаточно трёх двигателей-маховиков со взаимно перпендикулярными осями. Но в ответственных транспортных средствах их ставят больше для лучшей отказоустойчивости. Как и всякие изделия, имеющие высоконагруженные и высокоскоростные трущиеся подвижные детали, маховики и гиродины с механическим подшипником в роторе имеют ограниченный ресурс и ломаются. Так в 1997 для замены отработавших свой ресурс и вышедших из строя двигателей-маховиков на телескопе «Хаббл» была организована специальная ремонтная миссия STS-82.[4][5] В 2004 году для ремонта гиродинов на МКС, её экипажу пришлось совершить несколько выходов в открытый космос.[6]
Как двигатели-маховики, так и гиродины имеют ограничение по созданию механического момента. Крупные двигатели-маховики нельзя разгонять быстрее нескольких сотен или максимум тысяч оборотов в минуту из-за ограничений в подшипниках, которые также должны выдерживать инерционные нагрузки массивного маховика. Если внешние возмущения постоянно закручивают аппарат в одну и ту же сторону, то со временем маховик выходит на предельные обороты и его приходится «разгружать», включая двигатели ориентации и уменьшая обороты маховика.
Гиродины используют поворот оси маховиков для создания гироскопического момента. После поворота рамок гироскопа более чем на 90 градусов, гироскопический момент меняет знак на противоположный. Поэтому, во избежание значительного уменьшения гироскопического момента, в случае гиродина также приходится включать двигатели ориентации, «разгружая» кинематику гироскопа. Создание безразгрузочных гиродинов не представляется возможным из-за закона сохранения момента импульса, который в частности может изменять обороты роторов гиродина. Последнее зачастую не учитывается в парафизических изобретениях[7] угловых инерциоидов из-за использования упрощённых прецессионных моделей гироскопов.
wikiredia.ru
Основным элементом любого гироскопического прибора является гироскоп. Слово гироскоп греческого происхождения: гирос — вращение, скопейн — наблюдать. Термин гироскоп был введен французским ученым Л. Фуко, который В технике гироскопом называют быстро вращающееся симметричное тело (ротор), установленное в специальном подвесе. В авиационных приборах используется, как правило, карданов подвес. Основой авиационных гироскопических приборов являются трехстепенные и двухстепенные гироскопы.
Трехстепенной гироскоп (рис 3.1). Он состоит из ротора 1, внутренней 2 и наружной 3 рам. Ротор гироскопа 1 вращается в опорах вокруг оси OZв внутренняя рама вместе с ротором может поворачиваться вокруг оси OХв, а наружная рама имеет свободу вращения вокруг оси 0Унотносительно неподвижного основания. Таким образом, ротор гироскопа имеет три степени свободы, так как может вращаться вокруг трех осей системы ОХвУнZв, пересекающихся в одной точке О. Такой гироскоп называют трехстепенным. Если центр тяжести гироскопа совпадает с точкой О, то его называют астатическим.

Рис 3.1. Гироскоп с тремя степенями вободы.
1-ротор, 2-ось собстенного вращения, 3-внутренняя рама карданова подвеса, 4-внешняя рама карданова подвеса, 5-внутренняя ось подвеса, 6-внешняя ось подвеса.
Гироскоп с быстро вращающимся ротором обладает рядом свойств,которые обусловливают его широкое применение в авиационных приборах. Основными свойствами трехстепенного гироскопа являются способность сохранять неизменное положение оси вращения ротора в мировом пространстве, невосприимчивость к толчкам и ударам (устойчивость), способность совершать прецессионное движение.
Рассмотрим визуальные проявления свойств трехстепенного гироскопа при лабораторном эксперименте. Направим ось быстро вращающегося ротора гироскопа на определенную точку в пространстве. Совершая колебательные движения основания в разных плоскостях, обнаружим, что ось ротора сохраняет приданное ей направление. При ударе по какой-либо раме гироскопа молотком с резиновым наконечником замечаем слабо различимые колебания оси ротора, которые быстро затухают. Положение оси ротора в пространстве практически не изменяется. Нажимая на внутреннюю раму (создавая момент внешних сил относительно оси OХв), обнаружим, что гироскоп поворачивается вокруг оси 0Уннаружной рамы, а внутренняя рама остается неподвижной. Таким образом, гироскоп поворачивается не по направлению действия внешней силы, а в плоскости, перпендикулярной направлению этой силы. Такое движение гироскопа под действием момента внешней силы называют прецессионным.
Явление, заключающееся в сопротивляемости быстро вращающегося тела попыткам изменить его положение в пространстве, называют гироскопическим эффектом. Для пояснения сущности гироскопического эффекта рассмотрим трехстепенной гироскоп, условно освобожденный от рам карданова подвеса (рис. 3.2).
Предположим вначале, что гироскоп не вращается» и приложим в некоторой точке А внешнюю силу  . Под действием силы гироскоп начнет вращаться вокруг горизонтальной оси 0хв. Другим будет результат действия силы , если ротору гироскопа сообщить большую угловую скорость Ω. В этом случае ротор гироскопа будет обладать кинетическим моментом
. Под действием силы гироскоп начнет вращаться вокруг горизонтальной оси 0хв. Другим будет результат действия силы , если ротору гироскопа сообщить большую угловую скорость Ω. В этом случае ротор гироскопа будет обладать кинетическим моментом  , где J — момент инерции ротора относительно оси OZв. Обозначим конец вектора кинетического момента
, где J — момент инерции ротора относительно оси OZв. Обозначим конец вектора кинетического момента  буквой В. Главный момент
буквой В. Главный момент  внешней силы приложенный к гироскопу, совпадает с направлением оси OХв. В соответствии с теоремой Резаля скорость v конца вектора кинетического момента (т.е. точки В) геометрически равна главному моменту внешних сил . Следовательно, скорость v направлена параллельно оси OХви равна по величине . Таким образом, при действии силы на вращающийся гироскоп движение гироскопа происходит не по направлению силы FB, что имеет место в случае невращающегося ротора, а перпендикулярно к направлению действия силы , т. е. относительно оси 0Ун. Это движение и является прецессионным движением гироскопа. Тот факт, что при действии момента гироскоп не вращается относительно оси OХв, говорит о том, что кроме момента на него действует еще какой-то момент, равный моменту и противоположно направленный.
внешней силы приложенный к гироскопу, совпадает с направлением оси OХв. В соответствии с теоремой Резаля скорость v конца вектора кинетического момента (т.е. точки В) геометрически равна главному моменту внешних сил . Следовательно, скорость v направлена параллельно оси OХви равна по величине . Таким образом, при действии силы на вращающийся гироскоп движение гироскопа происходит не по направлению силы FB, что имеет место в случае невращающегося ротора, а перпендикулярно к направлению действия силы , т. е. относительно оси 0Ун. Это движение и является прецессионным движением гироскопа. Тот факт, что при действии момента гироскоп не вращается относительно оси OХв, говорит о том, что кроме момента на него действует еще какой-то момент, равный моменту и противоположно направленный.

Рис. 3.2. Схема действия сил и моментов при вращении гироскопа
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К КОНСТРУКЦИИ ГИРОСКОПИЧЕСКИХ ПРИБОРОВ
Как было показано в предыдущем разделе, гироскоп должен иметь. По возможности большой кинетический момент. Кинетический момент гироскопа — это произведение момента инерции ротора относительно оси вращения Iz на угловую скорость вращения H=IzΩ. Следовательно, можно увеличивать кинетический момент за счет увеличения момента инерции. Поскольку момент инерции тела вращения выражается форму
 (3.1)
(3.1)
где т — масса тела; R — радиус, то выгодно массу ротора размещать по возможности на большем удалении от оси вращения. В связи с этим роторы гиромоторов имеют конфигурацию такую, как показано на рис. 3.3. Ротор гиромотора 1 одновременно является якорем асинхронного двигателя переменного тока; в якоре имеется беличье колесо. Статором же у такого двигателя является внутренняя обмотка 2.
 Рис 3.3 гиромотор в разрезе: 1-ротор, 2-статор.
Рис 3.3 гиромотор в разрезе: 1-ротор, 2-статор.
Конструкция ротора выбирается в основном из соображений максимального момента инерции и отсутствия деформаций ротора от действия центробежных сил, возникающих при вращении ротора.
Авиационные гиромоторы питаются трехфазным напряжением U= 36 В с частотой f = 400 Гц. Так как они являются асинхронными двигателями, обладающими скольжением, то обороты ротора гиромоторов п = 22000 ÷23000 об/мин. Существуют гиромоторы, имеющие существенно большие угловые скорости, но ввиду того, что ресурс работы подшипников таких гиромоторов обратно пропорционален угловой скорости ротора, в гражданской авиации их не применяют.
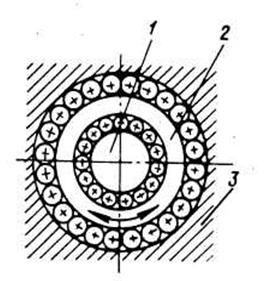
Рис 3.4 вращающиеся подшипники:
1- ось, 2-внутреннее кольцо, 3- неподвижное кольцо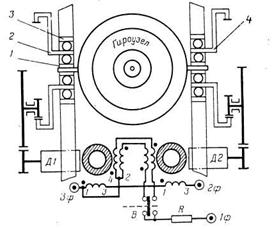
Рис 3.5 электромеханическая схема гироскопического подвеса
1- внутреннее кольцо, 2,4-средние кольца,4-наружное кольцо, Д1,Д2-двигатели
Поскольку способность гироскопа точно сохранять положение своей главной оси в пространстве зависит от величины моментов, действующих по осям его карданова подвеса, при конструировании гироскопов стараются свести эти моменты к минимуму.
В качестве опор для осей карданова подвеса гироскопа используют высокопрецизионные подшипники качения с малыми моментами трения.
Для особо точных приборов, например, гироскопов для курсовых систем, применяют так называемые вращающиеся подшипники с двумя рядами шариков, причем внутреннее кольцо 2(рис. 3.4) совершает принудительное вращение относительно оси 1 и неподвижного кольца 3.
На принципиальную возможность уменьшения влияния трения в подобных устройствах указал Н. Е. Жуковский. Идея Н. Е. Жуковского сводилась к следующему: если имеется 100 натянутых ниток, на которых лежит какой-нибудь предмет, например, карандаш, то, перемещая все нити вправо, карандаш будет увлекаться ими за счет трения тоже вправо. Если перемещать нити влево, то и карандаш будет двигаться влево. Заставляя каждую четную нить двигаться вправо, а нечетную — влево, будем иметь карандаш неподвижным. Конечно, это при условии, что на каждую нить будет выпадать одинаковая доля массы карандаша и коэффициент трения контактных поверхностей карандаш — нить везде одинаков. В этом примере трение не исчезает, оно только взаимно компенсируется.
На рис. 3.5 представлена конструкция внутренней рамы карданопа подвеса (гироузла). Как видно из рисунка, внутренние кольца 2и 4левого и правого подшипников могут поворачиваться двигателями Д1 и Д2. Причем кольца вращаются с одинаковыми угловыми скоростями, но в противоположные стороны. Возникающие при этом силы трении воздействуют на внутреннюю ось гироскопа с помощью моментов, направления которых противоположны, поэтому их суммарная величина оказывается близкой к нулю, и вредное воздействие моментов трения ослабляется. Сели даже суммарная величина моментов трения заставляет гироскоп прецессировать с некоторой небольшой скоростью, то периодическим изменением направления вращения двигателей (с помощью переключателя В со специальным кулачком) можно менять направление действия этого момента, а следовательно, и направление прецессии, что, в конечном счете уменьшает прецессию гироскопа от моментов трения в осях карданова подвеса С помощью такой схемы удается уменьшить собственные «уходы» гироскопа в несколько раз по сравнению с обычными подшипниками качения.

Рис 3.6 действие на гироскоп силы тяжести.
Существуют гироскопы с аэродинамическими подшипниками по осям карданова подвеса. Такой подшипник представляет собой втулку и ось, между которыми имеется воздушный зазор и ось как бы «плавает» в воздухе. Такие подшипники тоже имеют весьма малые моменты трения, но в гражданской авиации в силу ряда причин пока не применяются.
Гироскоп должен быть тщательно сбалансирован, т. е. центр масс гиромотора должен совпадать с точкой пересечения осей карданова подвеса. В противном случае, как показано на рис. 3.6, на гироскоп действуют моменты от ускорения силы тяжести.
Следует заметить, что при эксплуатации авиационных гироскопических приборов необходимо строго выполнять правила технической и летной эксплуатации, так как от этого зависит точность их работы и долговечность. Необходимо также помнить, что гироскопические приборы являются приборами дорогостоящими.
3.3. Гироскопические асинхронные двигители
Гироскопический двигатель предназначен для разгона маховой массы за определенный промежуток времени до номинальной частоты вращения и для последующей ее стабилизации при минимальном потреблении энергии. В настоящее время широкое применение нашли электрические гироскопические двигатели и, в частности, асинхронные.
Асинхронный гироскопический двигатель (АГД) конструктивно объединен в одно целое с маховиком (рис.3.7). Для обеспечения при заданных габаритах и массе наибольшего кинетического момента
H = J W, (3.2)
где J - момент инерции маховика относительно оси вращения; W - угловая скорость, стремятся вращающуюся массу разместить на максимальном удалении от оси вращения. С этой целью применяют обращенную конструкцию асинхронного двигателя с внешним короткозамкнутым ротором 1 (рис.3.7) и с внутренним неподвижным статором 2 . Для повышения кинетического момента внешний ротор располагают внутри специальной втулки 3, к которой крепятся крышки 4, 5. Втулка выполняется из латуни или бериллия.
Повышение кинетического момента при заданной массе внешнего ротора связано также с максимальным повышением его угловой скорости W (частоты вращения n). Частота вращения современных АГД лежит в пределах n = 15000 ¸ 60000 об/мин при числе пар полюсов р = 1; 2. Иногда для повышения частоты вращения АГД его питание осуществляют от автономного источника с повышенной частотой f = 500 ¸ 2000 Гц. Максимум частоты вращения АГД ограничен, как правило, качеством шарикоподшипников.
Отношение кинетического момента Н к массе АГД называют добротностью гироскопического двигателя. Ее повышение обеспечивается увеличением плотности материала частей конструкции, вращающихся на большом удалении от оси, и уменьшением ее для всех остальных элементов.
На валу АГД нет полезной нагрузки. Он работает в режиме холостого хода, преодолевая моменты трения внешнего ротора о газовую среду и трения в подшипниках, при нулевом к.п.д. Условным к.п.д. АГД принято считать отношение мощности механических потерь к полной потребляемой мощности, характеризующее совершенство асинхронного двигателя в электромагнитном отношении. Величина условного к.п.д. в зависимости от мощности, конструктивного исполнения и параметров АГД лежит в пределах h = 0,2 ¸ 0,9.

Рис. 3.7. Конструкция асинхронного гироскопического двигателя (АГД)
Для повышения стабильности частоты вращения при изменении плотности окружающей среди, связанной с изменением высоты полета летательного аппарата, номинальное скольжение АГД выбирают в пределах Sн = 0,015 ¸ 0,12. В некоторых случаях с целью исключения влияния высоты полета на работу АГД его помешают в специальную газовую или вакуумную камеру. Снижение вентиляционных потерь достигается в АГД полировкой внешней поверхности ротора.
Улучшение характеристик АГД путем увеличения массы ротора с другой стороны приводит к увеличению длительности процесса его запуска, которая лежит в пределах от десятков секунд до десятков минут. Для обеспечения приемлемых пусковых характеристик при проектировании АГД стремятся добиться кратности пускового момента Mп / Mн > 1,5, кратности максимального момента (перегрузочной способности) MЭМ М / Mн = 2 ¸ 5 и критического скольжения Sкр = 0,3 ¸ 0,4. Под номинальным моментом АГД понимают суммарный момент его потерь в номинальном режиме.
Поскольку АГД работает с нагрузкой, близкой по своему характеру к вентиляционной, то в процессе запуска избыточный электромагнитный момент DMЭМ меняется не существенно (рис. 3.8). При этом запуск происходит с практически постоянным ускорением. Для сокращения времени запуска иногда применяют запуск АГД при повышенном напряжении питания.

Рис.3.8. Механическая характеристика АГД
Стремление по возможности уменьшить суммарный момент потерь, т.е. величины номинального скольжения и активной составляющей тока статора, обусловило характерную особенность АГД - относительно большой намагничивающий ток, достигающий 60 - 90% от номинального значения. Коэффициент мощности составляет при этом cosj =0,4 + 0,8. Он будет тем меньшим, чем с меньшим скольжением работает АГД.
Для обеспечения максимальной точности к АГД предъявляется ряд специфических требований:
- механическая стабильность элементов конструкции и их соединений, т.е. способность элементов конструкции сохранять постоянство положений центров масс в различных режимах работы и при различных внешних воздействиях;
- симметрия и жесткость конструкции в целом, связанные с необходимостью симметричного расположения (относительно продольной и поперечной осей симметрии) вращающихся и наиболее нагретых элементов конструкции, имеющих значительную массу;
- минимум и постоянство в процессе работы потребляемой мощности, т.е. нагрева АГД, и неравномерности распределения температур, что связано с уменьшением аэродинамических потерь (потерь на трение внешнего ротора о воздух), с обеспечением постоянства осевой нагрузки на подшипники и сохранности смазки, с применением подшипников, их сборок и смазки повышенного качества.
Реализация этих требований привела к созданию симметричных конструкций АГД, состоящих из минимального количества элементов. Так, например, внутренние дорожки качения подшипников (рис.3.7) часто изготавливаются непосредственно на оси, чем сокращается количество соединений деталей и повышается точность сборки.
В отличие от асинхронных машин обычного исполнения АГД не имеют осевого люфта в подшипниковых узлах. Требуемая жесткость конструкции обеспечивается предварительной осевой нагрузкой подшипников, которая в процессе работы должна оставаться неизменной.
Симметрия и жесткость конструкции АГД достигаются применением конструкционных материалов, имеющих одинаковый коэффициент расширения. Так, например, ось, крышки, кольца подшипников и ротор АГД выполняются из подшипниковой стали, а втулка - из бериллия.
Указанные особенности относятся также к синхронным гироскопическим двигателям (СГД), в качестве которых находят широкое применение гистерезисные двигатели .
В гироскопах авиационных приборов, устанавливаемых на самолетах гражданской авиации, ротор объединен с внутренней рамой в единый конструктивный блок — гироузел. Гироузел состоит из гирокамеры и размещенного в гирокамере гиромотора. Гирокамера выполняет роль внутренней рамы гироскопа и имеет оси для подвеса в опорах наружной рамы. Гиромоторы в большинстве случаев представляют собой трехфазные асинхронные двигатели с короткозамкнутым внешним ротором и внутренним статором. Гиромотор ГМ-4П (рис. 3.9) состоит из ротора, статора, шарикоподшипниковых опор и оси. Статор имеет пакет железа 2, обмотку 1 и втулками 3 и 12 жестко укреплен на оси 5. Выходные провода обмотки статора выведены наружу через полую часть оси 5. Ротор гиромотора состоит из латунного обода 10, пакета железа 8 с короткозамкнутой обмоткой 16 и массивного кольца 14. Пакет 8 ротора и кольцо 14 посажены в обод ротора на прессовой посадке. Фланцы 6 и 11 посажены в обод 10 с натягом и крепятся к нему винтами. Внутренние кольца шариковых подшипников 4 и 13 установлены на цапфы фланцев 6 и 11 ротора с натягом. Наружное кольцо подшипника 4 вставлено во втулку 3 с радиальным зазором, а наружное кольцо подшипника 13 — во втулку 12 с натягом В гнезде статора под наружным кольцом свободно сидящего шарикового подшипника 4 поставлена пружинная шайба 7. Она служит для компенсации температурных изменений линейных размеров гиромотора Прокладки 9 и 15 служат для установления осевого натяга на шариковых подшипниках Концы оси гиромотора имеют резьбу. При помещении гиромотора в гирокамеру его ось пропускается через отверстия в корпусе и крышки гирокамеры После крепления крышки гирокамеры к ее корпусу ось гиромотора крепится к ним с помощью гаек. Гироузлы одинаковых типов могут применяться в различных гироскопических приборах, Иначе обстоит дело с наружными рамами. Конструктивное исполнение наружных рам определяется в первую очередь типом гироприбора и является в каждом конкретном случае сугубо индивидуальным. В раме 1 на посадочные места по оси Охнзакрепляются наружные кольца шариковых подшипников (рис. 3.10) Во внутренних кольцах шариковых подшипников закрепляются оси гирокамеры гироузла. По оси 0ун в раме закреплены полуоси 2 и 3, предназначенные для подвеса рамы в корпусе гироприбора.
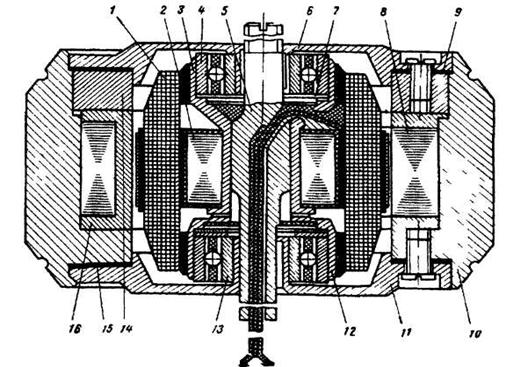
Рис. 3.9.Консрукция гиромотора ГМ-4П

Рис. 3.10. Конструкция наружной рамы гироприбора
3.4 Виды подвесов гироскопа
При конструировании гироприборов большое внимание уделяется выбору опор, обеспечивающих свободу вращения и осуществляющих двустороннюю удерживающую связь между ротором, рамами карданова подвеса и корпусом прибора. Опоры гироскопа делятся на главные, обеспечивающие свободу вращения ротора, и опоры карданова подвеса, обеспечивающие свободу движения рам вокруг своих осей. Такая классификация обусловлена различными условиями работы опор Главные опоры в течение длительного времени работают при повышенных скоростях вращения, в то время как опоры карданова подвеса работают при малых скоростях и небольших углах поворота. Основными показателями качества опор являются: момент сил трения Мтр, осевые я радиальные люфты, долговечность работы Тр. Момент сил трения в главных опорах не влияет на точность гироприбора, но влияет на выбор мощности гиромотора и срок его службы. Момент трения в опорах карданова подвеса в значительной степени оказывает влияние на точность гироприбора. В связи с этим разрабатываются специальные меры для снижения трения в опорах карданова подвеса Отрицательное влияние на точность гироприборов оказывают также люфты в главных опорах карданова подвеса.
Наибольшее распространение в авиационных гироскопах получили шарикоподшипниковые опоры. Разработанные в настоящее время опоры такого типа позволяют получить достаточную точность и надежность приборов.
В тех случаях, когда необходимо повысить точность работы прибора, используют определенные конструктивные меры. В частности, моменты трения по внутренним осям карданова подвеса гироагрегатов курсовых систем уменьшают с помощью специальных «вращающихся» подшипников (рис. 3.11). Гироузел 3 трехстепенного гироскопа подвешен на оси 4 в наружной раме 7 с помощью комбинированных двойных подшипников. Средние кольца 2, 8 подшипников на левом и правом концах оси подвеса гироузла приводятся во вращение в противоположные стороны (привод вращения средних колец на рисунке не показан). Оси вращения 5, 9 наружной рамы закреплены в подшипниках 1, 6, наружные кольца которых неподвижны относительно основания.
Пусть кинетический момент гироскопа совпадает с направлением полета. Тогда при повороте самолета относительно поперечной оси с угловой скоростью Ф наружная рама гироскопа будет разворачиваться вместе с основанием относительно неподвижной оси 4 подвеса гироузла с угловой скоростью —  .Ось 4 остается неподвижной в силу основного свойства трехстепенного гироскопа — сохранять неизменным в пространстве положение главной оси.
.Ось 4 остается неподвижной в силу основного свойства трехстепенного гироскопа — сохранять неизменным в пространстве положение главной оси.
При равенстве моментов трения в опорах уход гироскопа отсутствует. Однако на практике равенства моментов обеспечить не удается и уход имеет место, но со значительно меньшей скоростью, чем при невращающихся опорах. Снижению систематического ухода способствует введение периодического реверсирования вращения средних колец.

Рис. 3.11. Схема конструкции «вращающихся» подшипников
В случае равных и небольших времен вращения средних колец подшипников в разные стороны при реверсировании гироскоп будет отклоняться от среднего положения на равные и противоположные углы, совершая тем самым малые колебания относительно первоначального положения оси кинетического момента.

Рис. 3.12. Привод вращения средних колес «вращающихся» подшипников
Реверсирование вращения средних колец подшипников в гироагрегатах курсовых систем (рис. 3.12) производится переключателем В', управляемым специальным кулачком. Кроме «вращающихся» подшипников, могут быть использованы другие конструкции, позволяющие существенно снизить (или практически исключить) трение в подвесе гироскопа путем компенсации силы тяжести подвешиваемой части гироскопа некоторой другой противоположно направленной силой. К подвесам такого типа (рис. 3.13) относят: жидкостный (а), гидростатический (б), магнитный (в), электростатический (г) и др.
Из перечисленных типов подвесов в авиационных гироскопических приборах используется в настоящее время только жидкостный подвес (рис, 3.13, а). В гироскопе герметичный гироузел 1 подвешивается в герметичном корпусе 2, заполненном жидкостью. Плотность жидкости подбирается такой, чтобы масса вытесняемого гироузлом объема жидкости была равна массе гироузла. Тем самым воспринимаемая опорами нагрузка снижается практически до нуля, что обеспечивает весьма малые моменты сил трения в опорах подвеса гироузла.
Существуют также гироприборы на основе трехстепенного гироскопа с подвесом данного типа.
В гидростатическом подвесе жидкость или газ вводится под давлением через узкие отверстия 1 в зазор 2 между неподвижной частью опоры 4 и гироузлом 3 (рис. 3.13, б). При уменьшении зазора, вызванном нагрузкой, уменьшение расхода жидкости приводит к увеличению местного давления. Параметры подвеса выбираются таким образом, чтобы сумма сил местного давления уравновешивала силу веса гироузла при зазоре в пределах сотых долей миллиметра.
Магнитный подвес чувствительного элемента используется в криогенных гироскопах. Техническая реализация такого гироскопа базируется на использовании явления сверхпроводимости некоторых материалов, которое наступает при температурах, близких к абсолютному нулю. Это явление состоит в резком уменьшении электрического сопротивления материала. При помещении шарика из сверхпроводящего материала в магнитное поле, напряженность которого не превышает некоторого критического значения, на его поверхности наводятся токи, препятствующие проникновению поля внутрь шарика. Вследствие этого шарик может висеть в магнитном поле, не имея механической точки опоры. Если вокруг шарика создан вакуум, то практически исключатся все силы сопротивления вращению шарика.
В экспериментальном криогенном гироскопе (рис. 3.13, в) корпус прибора представляет собой криогенную установку 7, заключенную в кожух 8 (сосуд Дьюара). Криогенная установка охлаждается жидким гелием или азотом и внутри сферической полости 4 в корпусе прибора поддерживается температура, близкая к абсолютному нулю. Ток, протекающий по обмоткам катушек 1, создает центрирующее магнитное поле 2. На поверхности полой тонкостенной сферы 3, сделанной из сверхпроводящего металла, например ниобия, образуются вихревые токи, создающие магнитное поле, препятствующее проникновению центрирующего магнитного поля в металл. Силы взаимодействия центрирующего магнитного поля и поля, наводимого в металле сферы, удерживают ее во взвешенном состоянии внутри сферической полости корпуса прибора. Сфера 3 и тяжелый обод (5, помещенный внутри сферы, образуют ротор гироскопа, который приводится во вращение с большой угловой скоростью Ω вокруг оси z, перпендикулярной плоскости обода, электродвигателем 5. В пространстве между сферическим ротором и полостью корпуса создается высокий вакуум. Электродвигатель 5 используется только для разгона ротора. После отключения двигателя ротор движется по инерции в течение нескольких дней и даже месяцев.

Рис. 3.13. Виды подвесов гироскопа
Гироскопы с электростатическим подвесом (рис. 3.13, г) конструктивно аналогичны криогенным гироскопам. Ротор 1 такого гироскопа изготовлен из бериллия в виде тонкого полого шара, помещенного в сферическую полость камеры 3, выполненной из специальной керамики, являющейся изолятором. На внутренней поверхности камеры расположены три пары чашеобразных электродов 2, питаемых переменным электрическим током. Оси симметрии каждой пары таких электродов направлены по трем взаимно перпендикулярным направлениям, поэтому создаваемое ими электростатическое поле удерживает центр сферического ротора в центре О камеры. Ротор раскручивается с помощью вращающегося магнитного поля, создаваемого статором 4, несущим на себе электрическую обмотку. В полости камеры 3 поддерживается высокий вакуум. Электрическое напряжение на обмотку статора подается лишь в период разгона ротора. В дальнейшем ротор длительное время вращается по инерции.
3.5 Устройства для передачи энергии
Устройства для передачи энергии служат для подвода электрической энергии от внешних источников к элементам гироприборов, расположенным на перемещающихся относительно друг друга узлах. С помощью данных устройств осуществляется электрическая связь между элементами, помещенными на корпусе прибора и наружной раме карданова подвеса или на наружной и внутренней рамах.
Наиболее просто энергия передается посредством гибких проволочных проводников (рис. 3.14), Гибкий проводник 3 представляет собой пучок металлических жил, помещенных в изоляционную оплетку.

Рис. 3.14. Использование гибкого проводника для передачи энергии в гироскопе
Концы жил заделаны в общий наконечник, закрепленный на переходных контактах 4. Контакты обеспечивают соединение наконечника с жестким проводом 5, расположенным на соответствующей детали 1 подвеса. Контакты монтируют на колодке 2, изолирующей контакты от металлической поверхности детали.
В тех случаях, когда углы взаимного разворота деталей гироприбора достигают существенных значений, для передачи энергии применяют скользящие контакты (рис. 3.15, а). Щетка 3, по которой передается электрический ток, скользит по токоприемному кольцу 2. Кольцо изолировано от оси рамы 1 сплошной изоляционной втулочкой с ребордами, предохраняющими щетку от схода с кольца. Если в местах сочленения деталей подвеса необходимо осуществить несколько изолированных друг от друга линий передачи электрического тока, то по оси подвеса устанавливается необходимое число токоприемных колец.
Широко применяемой разновидностью устройств передачи энергии являются точечные контакты. Они отличаются от скользящих контактов тем, что в данном случае точка контакта лежит на оси вращения элементов токоподвода. Каждый точечный контакт (рис. 3.15, б) состоит из неподвижного 3 и подвижного 4 контактов, образующих контактную пару. В приведенном примере неподвижные контакты закреплены на наружной раме 2, а подвижные—на оси вращения внутренней рамы 1. Контакты 3 и 4 изолированы от металлических деталей подвеса электроизоляционным материалом 5.

Рис 3.15 контактные устройства используемеые в гироприборах.
а-скальзящие, 2-набор точечных контактов.
3.6 Корректирующие устройства.
Одним из основных свойств трехстепенного гироскопа является способность сохранять неизменным положение оси вращения ротора (главной оси гироскопа) в мировом пространстве. Однако для решения ряда практических задач необходимо, чтобы главная ось гироскопа сохраняла неизменное направление не в мировом пространстве, а относительно той или иной выбранной системы координат. Так, для определения с помощью трехстепенного гироскопа углов крена и тангажа ЛА необходимо, чтобы ось вращения ротора была направлена по вертикали места. При определении с помощью трехстепенного гироскопа отклонений ЛА от заданного направления необходимо, чтобы его главная ось выдерживала заданное направление в горизонтальной плоскости. Для устранения нежелательных отклонений главной оси гироскопа от требуемого направления или компенсации различного рода возмущающих моментов, нарушающих нормальный режим работы гироскопического прибора, применяют корректирующие устройства.
Корректирующие устройства гироскопических приборов обеспечивают сохранность требуемого положения главной оси гироскопа путем приложения к гироскопу внешних управляющих (корректирующих) моментов или компенсацию уходов гироскопа в показаниях гироприбора. Основными элементами корректирующих устройств являются чувствительные элементы и исполнительные органы. В качестве чувствительных элементов выбирают элементы, обладающие избирательностью к опорному направлению или устойчиво сохраняющие заданное им направление, В авиационных приборах в основном используют гравитационные, магнитные и ориентированные по небесным светилам чувствительные элементы.
Опорным направлением для гравитационных элементов является направление вертикали места, совпадающее с направлением ускорения силы тяжести. Магнитные чувствительные элементы реагируют на магнитное поле Земли, поэтому опорным направлением для них является направление магнитного меридиана. Чувствительные элементы, ориентированные по небесным светилам, обеспечивают задание устойчивого направления на Солнце, Луну, планеты или звезды. Исполнительными органами корректирующих устройств авиационных приборов являются, как правило, двухфазные' реверсивные асинхронные электродвигатели, работающие в заторможенном режиме, а также сельсинные и потенциометрические следящие системы.
Среди гравитационных чувствительных элементов наиболее широкое распространение получили жидкостные маятниковые датчики направления вертикали. Используются однокоординатные и двухкоординатные жидкостные маятниковые датчики (маятниковые переключатели).
Однокоординатный жидкостный маятниковый датчик (ЖМД) (рис. 3.16) представляет собой стеклянный баллон 1 с вваренными в него платиновыми электродами 3, 5, 6. Баллон заполнен токопроводящей жидкостью (электролитом) 2 так, что оставшийся воздушный пузырек 4 при горизонтальном положении датчика поровну и примерно наполовину перекрывает электроды 3, 5. Электрическая схема взаимодействия ЖМД и исполнительного органа (двухфазного асинхронного двигателя) системы коррекции приведена на рис. 15.13. Электроды 3 и 6 в сосуде 5 соединены с обмотками управления двигателя 2, Общая точка обмоток управления 1подключена к одной из фаз источника литания переменного тока. Центральный контакт 4 подключен к другой фазе.

Рис. 3.16. Однокоординатный жидкостный маятниковый датчик

Рис. 3.17. Электрическая схема однокоординатной системы коррекции
Схемы коррекции главной оси трехстепенного гироскопа в плоскости горизонта и по направлению вертикали места приведены на рис. 3.18. На рис.3.18, а приведена схема горизонтальной коррекции главной оси

Рис. 3.18. Коррекция главной оси трехстепенного гироскопа:
а – схема горизонтальной коррекции; б – схема коррекции по направлению вертикали места
трехстепенного гироскопа (1 — жидкостный маятниковый датчик, 2 — коррекционный двигатель). При горизонтальном положении главной оси гироскопа, а следовательно, и датчика электрическое сопротивление между средним электродом 6 (см. рис. 3.16) и каждым из крайних электродов 3, 5 одинаково, и по управляющим обмоткам коррекционного двигателя протекают токи, равные по величине, но противоположные по направлению. В этом случае двигатель неподвижен и момента не создает. При отклонении главной оси гироскопа от плоскости горизонта воздушный пузырек смещается относительно электродов и изменяется площадь контактной поверхности электролита с электродами. Электрическое сопротивление цепей между центральным и крайними электродами изменяется. При этом большим становится сопротивление цепи того электрода, поверхность соприкосновения которого с жидкостью меньше. В результате по управляющим обмоткам коррекционного двигателя потекут разные по значению и направлению токи. Двигатель создаст момент относительно оси подвеса наружной рамы, и гироскоп начнет прецессировать относительн
cyberpedia.su

 Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование).
Иллюстрация к основному свойству 3-степенного гироскопа (идеализированное функционирование). Гироско́п (от др.-греч. γῦρος «круг» и σκοπέω «смотрю») — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительно инерциальной системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим и обусловлено название «гироскоп».
 Прецессия
Прецессия  Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852)
Гироскоп, изобретённый Фуко (построил Дюмолен-Фромент, 1852) До изобретения гироскопа человечество использовало различные методы определения направления в пространстве. Издревле люди ориентировались визуально по удалённым предметам, в частности, по Солнцу. Уже в древности появились первые приборы: отвес и уровень, основанные на гравитации. В средние века в Китае был изобретён компас, использующий магнетизм Земли. В Европе были созданы астролябия и другие приборы, основанные на положении звёзд.
Гироскоп изобрёл Иоганн Боненбергер и опубликовал описание своего изобретения в 1817 году[1]. Однако французский математик Пуассон ещё в 1813 году упоминает Боненбергера как изобретателя этого устройства[2]. Главной частью гироскопа Боненбергера был вращающийся массивный шар в кардановом подвесе[3]. В 1832 году американец Уолтер Р. Джонсон придумал гироскоп с вращающимся диском[4][5]. Французский учёный Лаплас рекомендовал это устройство в учебных целях[6]. В 1852 году французский учёный Фуко усовершенствовал гироскоп и впервые использовал его как прибор, показывающий изменение направления (в данном случае — Земли), через год после изобретения маятника Фуко, тоже основанного на сохранении вращательного момента[7]. Именно Фуко придумал название «гироскоп». Фуко, как и Боненбергер, использовал карданов подвес. Не позже 1853 года Фессель изобрёл другой вариант подвески гироскопа[8].
Преимуществом гироскопа перед более древними приборами являлось то, что он правильно работал в сложных условиях (плохая видимость, тряска, электромагнитные помехи). Однако вращение гироскопа быстро замедлялось из-за трения.
Во второй половине XIX века было предложено использовать электродвигатель для разгона и поддержания вращения гироскопа. Впервые на практике гироскоп был применён в 1880-х годах инженером Обри для стабилизации курса торпеды. В XX веке гироскопы стали использоваться в самолётах, ракетах и подводных лодках вместо компаса или совместно с ним.
Основные типы гироскопов по количеству степеней свободы:
Основные два типа гироскопов по принципу действия:
Среди механических гироскопов выделяется ро́торный гироско́п — быстро вращающееся твёрдое тело (ротор), ось вращения которого может свободно изменять ориентацию в пространстве. При этом скорость вращения гироскопа значительно превышает скорость поворота оси его вращения. Основное свойство такого гироскопа — способность сохранять в пространстве неизменное направление оси вращения при отсутствии воздействия на него моментов внешних сил и эффективно сопротивляться действию внешних моментов сил. Это свойство в значительной степени определяется величиной угловой скорости собственного вращения гироскопа.
Впервые это свойство использовал Фуко в 1852 г. для экспериментальной демонстрации вращения Земли. Именно благодаря этой демонстрации гироскоп и получил своё название от греческих слов «вращение», «наблюдаю».
 Прецессия механического гироскопа.
Прецессия механического гироскопа. При воздействии момента внешней силы вокруг оси, перпендикулярной оси вращения ротора, гироскоп начинает поворачиваться вокруг оси прецессии, которая перпендикулярна моменту внешних сил.
Это свойство обусловлено возникновением так называемой кориолисовой силы. Так, при воздействии момента внешней силы гироскоп поначалу будет вращаться именно в направлении действия внешнего момента (нутационный бросок). Каждая частица гироскопа будет таким образом двигаться с переносной угловой скоростью вращения вследствие действия этого момента. Но ротор гироскопа, помимо этого, и сам вращается, поэтому каждая частица будет иметь относительную скорость. В результате возникает кориолисова сила, которая заставляет гироскоп двигаться в перпендикулярном приложенному моменту направлении, то есть прецессировать. Прецессия вызовет кориолисову силу, момент которой скомпенсирует момент внешней силы (гироскопический момент).
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инерционности.
Упрощённо, поведение гироскопа описывается уравнением:

где векторы  и
и  являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр
являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр  — его моментом инерции, векторы
— его моментом инерции, векторы  и
и  угловой скоростью и угловым ускорением.
угловой скоростью и угловым ускорением.
Отсюда следует, что момент силы , приложенный перпендикулярно оси вращения гироскопа, то есть перпендикулярный , приводит к движению, перпендикулярному как , так и , то есть к явлению прецессии. Угловая скорость прецессии  гироскопа определяется его моментом импульса и моментом приложенной силы[9]:
гироскопа определяется его моментом импульса и моментом приложенной силы[9]:

то есть обратно пропорциональна скорости вращения гироскопа.
Вибрационные гироскопы — устройства, сохраняющие плоскость своих колебаний при повороте основания. Этот тип гироскопов является намного более простым и дешёвым при сопоставимой точности по сравнению с роторным гироскопом. В зарубежной литературе также употребляется термин «Кориолисовы вибрационные гироскопы» — так как принцип их действия основан на эффекте действия силы Кориолиса, как и у роторных гироскопов.Например, вибрационные гироскопы применяются в системе измерения наклона электрического самоката Сигвей. Система состоит из пяти вибрационных гироскопов, чьи данные обрабатываются двумя микропроцессорами.Именно такой тип гироскопов используется в мобильных устройствах, в частности, в iPhone 4 и других.
Два подвешенных грузика вибрируют на плоскости в MEMS гироскопе с частотой  .
.
При повороте гироскопа возникает Кориолисово ускорение равное  , где
, где  — скорость и
— скорость и  — угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как :
— угловая частота поворота гироскопа. Горизонтальная скорость колеблющегося грузика получается как :  , а положение грузика в плоскости —
, а положение грузика в плоскости —  . Внеплоскостное движение
. Внеплоскостное движение  , вызываемое поворотом гироскопа равно:
, вызываемое поворотом гироскопа равно:
 где:
где:  — масса колеблющегося грузика.
— масса колеблющегося грузика.  — коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.
— коэффициент жёсткости пружины в направлении, перпендикулярном плоскости.  — величина поворота в плоскости перпендикулярно движению колеблющегося грузика.
— величина поворота в плоскости перпендикулярно движению колеблющегося грузика.  Гироскоп на МАКС-2009
Гироскоп на МАКС-2009  Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра.
Схема лазерного гироскопа. Здесь луч лазера циркулирует с помощью зеркал и постоянно усиливается лазером. Замкнутый контур имеет ответвление в датчик на базе интерферометра. Делятся на волоконно-оптические и лазерные гироскопы. Принцип действия основан на эффекте Саньяка, открытом в 1913 году[12][13]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[14]. В то время как в неинерциальной системе она может отличаться от c[15]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре[12]:

где  -разность времён прихода лучей, выпущенных в разных направлениях,
-разность времён прихода лучей, выпущенных в разных направлениях,  — площадь контура,
— площадь контура, — угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:
— угловая скорость вращения гироскопа. Так как величина очень мала, то её прямое измерение с помощью пассивных интерферометров возможно только в волоконно-оптических гироскопах с длинной волокна 500—1000 м. Во вращающемся кольцевом интерферометре лазерного гироскопа можно измерить фазовый сдвиг встречных волн, равный[12]:

где  — длина волны.
— длина волны.
 Схема простейшего механического гироскопа в карданном подвесе
Схема простейшего механического гироскопа в карданном подвесе Свойства гироскопа используются в приборах — гироскопах, основной частью которых является быстро вращающийся ротор, который имеет несколько степеней свободы (осей возможного вращения).
Чаще всего используются гироскопы, помещённые в карданов подвес. Такие гироскопы имеют 3 степени свободы, то есть он может совершать 3 независимых поворота вокруг осей АА', BB' и CC', пересекающихся в центре подвеса О, который остаётся по отношению к основанию A неподвижным.
Гироскопы, у которых центр масс совпадает с центром подвеса O, называются астатическими, в противном случае — статическими гироскопами.
Для обеспечения вращения ротора гироскопа с высокой скоростью применяются специальные гиромоторы.
Для управления гироскопом и снятия с него информации используются датчики угла и датчики момента.
Гироскопы используются в виде компонентов как в системах навигации (авиагоризонт, гирокомпас, ИНС и т. п.), так и в системах ориентации и стабилизации космических аппаратов. При использовании в гировертикали показания гироскопа должны корректироваться акселерометром(маятником), так как из за суточного вращения земли и ухода гироскопа, происходит отклонение от истиной вертикали. Кроме того, в механических гироскопах может использоваться смещение его центра масс, которое эквивалентно непосредственному воздействию маятника на гироскоп[16].
Системы стабилизации бывают трех основных типов.
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется гироскопом и двигателем разгрузки, в начале действует гироскопический момент, а потом подключается двигатель разгрузки.
Для стабилизации вокруг каждой оси нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки, но в начале появляется небольшой гироскопический момент, которым можно пренебречь.
Для стабилизации вокруг двух осей нужен один гироскоп. Стабилизация осуществляется только двигателями разгрузки.

Постоянно растущие требования к точностным и эксплуатационным характеристикам гиро-приборов заставили ученых и инженеров многих стран мира не только усовершенствовать классические гироскопы с вращающимся ротором, но и искать принципиально новые идеи, позволившие решить проблему создания чувствительных датчиков для измерения и отображения параметров углового движения объекта.
В настоящее время известно более ста различных явлений и физических принципов, которые позволяют решать гироскопические задачи. В России и США выданы тысячи патентов и авторских свидетельств на соответствующие открытия и изобретения.
Поскольку прецизионные гироскопы используются в системах наведения стратегических ракет большой дальности, во время холодной войны информация об исследованиях, проводимых в этой области, классифицировалась как секретная.
Перспективным является направление развития квантовых гироскопов.
Сегодня созданы достаточно точные гироскопические системы, удовлетворяющие большой круг потребителей. Сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к гражданским применениям гироскопической техники. Например, сегодня широко распространено использование микромеханических гироскопов в системах стабилизации автомобилей или видеокамер.
По мнению сторонников таких методов навигации, как GPS и ГЛОНАСС, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации (в пределах зоны покрытия спутниковой навигационной системы (СНС), то есть в пределах планеты). В настоящее время СНС системы по параметрам массы, габаритов и стоимости превосходят гироскопические.
В настоящее время разрабатывается система навигационных спутников третьего поколения. Она позволит определять координаты объектов на поверхности Земли с точностью до единиц сантиметров в дифференциальном режиме, при нахождении в зоне покрытия корректирующего сигнала DGPS. При этом якобы отпадает необходимость в использовании курсовых гироскопов. Например, установка на крыльях самолета двух приёмников спутниковых сигналов, позволяет получить информацию о повороте самолёта вокруг вертикальной оси.
Однако системы СНС оказываются неспособны точно определять положение в городских условиях, при плохой видимости спутников. Подобные проблемы обнаруживаются и в лесистой местности. Кроме того прохождение сигналов СНС зависит от процессов в атмосфере, препятствий и переотражений сигналов. Автономные же гироскопические приборы работают в любом месте — под землёй, под водой, в космосе.
В самолётах СНС оказывается точнее ИНС на длинных участках. Но использование двух СНС-приёмников для измерения углов наклона самолета даёт погрешности до нескольких градусов. Подсчёт курса путём определения скорости самолёта с помощью СНС также не является достаточно точным. Поэтому, в современных навигационных системах оптимальным решением является комбинация спутниковых и гироскопических систем, называемая интегрированной (комплексированной) ИНС/СНС системой.
За последние десятилетия, эволюционное развитие гироскопической техники подступило к порогу качественных изменений. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нестандартных применений таких приборов. Открылись совершенно новые интересные задачи: геологоразведка, предсказание землетрясений, сверхточное измерение положений железнодорожных путей и нефтепроводов, медицинская техника и многие другие.
 iPhone 4 с гироскопом внутри
iPhone 4 с гироскопом внутри  | Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье.На странице обсуждения должны быть пояснения. |
Значительное удешевление производства МЭМС-гироскопов привело к тому, что они начинают использоваться в смартфонах и игровых приставках.
Появление МЭМС-гироскопа[17] в новом смартфоне Apple iPhone 4 открывает новые возможности в 3D-играх и в формировании дополненной реальности[18]. Уже сегодня, разные производители смартфонов и игровых приставок собираются использовать МЭМС-гироскопы в своих продуктах. Вскоре появятся приложения на смартфонах и игровых приставках, которые сделают компьютерный экран окном в другой — виртуальный мир. Например в 3D-игре, пользователь перемещая смартфон или мобильную игровую консоль, увидит другие стороны игровой — виртуальной реальности. Наклоняя смартфон вверх — пользователь увидит виртуальное небо, а наклоняя вниз — виртуальную землю. Вращая по сторонам света — может осмотреться вокруг — внутри виртуального мира. Гироскоп даёт программе данные о том, как ориентирован смартфон относительно реального мира, а программа связывает эти данные с виртуальным миром. Таким же образом, но уже не в игре, можно использовать гироскоп для формирования дополненной реальности.
Также гироскоп стал применяться в управляющих игровых контроллерах, таких как: Sixaxis для Sony PlayStation 3 и Wii MotionPlus для Nintendo Wii. В обоих перечисленных контроллерах использованы два дополняющих друг друга, пространственных сенсора: акселерометр и гироскоп. Впервые игровой контроллер, умеющий определять своё положение в пространстве, был выпущен компанией Nintendo — Wii Remote для игровой приставки Wii, но в нём используется только трёхмерный акселерометр. Трёхмерный акселерометр не способен давать точное измерение параметров вращения при высокодинамичных движениях. И именно поэтому в новейших игровых контроллерах: Sixaxis и Wii MotionPlus, кроме акселерометра, был использован дополнительный пространственный сенсор — гироскоп.
Самыми простыми примерами игрушек, сделанных на основе гироскопа, являются йо-йо, волчок (юла) и модели вертолетов.Волчки отличаются от гироскопов тем, что не имеют ни одной неподвижной точки.Кроме того, существует спортивный гироскопический тренажёр.
dic.academic.ru

Авторы - Виталий Пузрин
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, - там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также "крутых" современных гироскопах размешены в разных корпусах.
 |  |
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо. Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.
Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Развитие современных технологий позволило разработать более совершенные датчики угловых скоростей. В результате появились пьезогироскопы, которые к настоящему времени полностью вытеснили механические. Конечно, они по-прежнему используют эффект кориолисова ускорения, но датчики являются твердотельными, то есть вращающиеся части отсутствуют. В наиболее распространенных датчиках используются вибрирующие пластины. Поворачиваясь вокруг оси, такая пластина начинает отклоняться в плоскости, поперечной плоскости вибрации. Это отклонение измеряется и поступает на выход датчика, откуда снимается уже внешней схемой для последующей обработки. Самыми известными производителями подобных датчиков являются фирмы Murata и Tokin.

Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.

У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т.е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка "нуля", а в более дорогих - автоматическая установка "нуля" микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
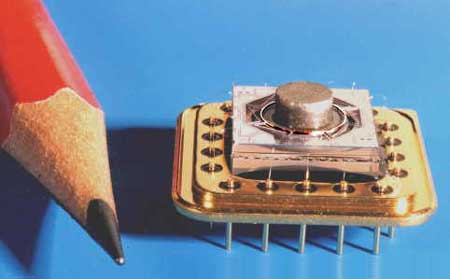
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой "AVCS") уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур. Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.
 |  |
Наиболее известными производителями гироскопов на сегодняшний день являются фирмы Futaba, JR-Graupner, Ikarus, CSM, Robbe, Hobbico и т.д.
Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.

Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась. Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет - посмотрите характеристики устройства и руководство по эксплуатации).
Регулировка чувствительности реализуется несколькими способами:
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только "стандартный" режим работы, то можно отметить, что:
Недостатки:
Вот довольно известные примеры описанного типа гироскопов:
 |  |
 |  |
 |  |

При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки "3D", "AVSC" (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде "Torque Roll".
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:
 |  |
 |  |

Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую - то гироскоп перейдет в стандартный режим. Средная точка - когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым "цифровым" машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.
 |  |

При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов. Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена - в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен - при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 "Беркут" С-37 показывал фигуру "харриер". Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет "несваливаемым на крыло". Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И.В.Остославского "Аэродинамика самолета".
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, - по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форумеwww.rcdesign.ru
Изобретение относится к области приборостроения и может быть использовано в системах инерциального управления движущимися объектами. Технический результат - расширение функциональных возможностей. Для достижения данного результата ротор электродвигателя гироскопа предварительно должен быть установлен в оптимальную точку трогания. Для двухфазного шагового электродвигателя такая установка осуществлена за счет предварительной поочередной подачи на фазные обмотки двух постоянных сигналов. Первый сигнал по обмотке и полярности должен соответствовать первому пусковому импульсу в цикле прямой последовательности вращения, второй сигнал - последнему импульсу в цикле прямой последовательности вращения. 2 ил.
Изобретение относится к гироскопии и, в частности, к алгоритму трогания шагового электродвигателя датчика угловой скорости на базе модуляционного гироскопа и может быть использовано в системах инерциального управления объектами бескарданного типа.
В настоящее время известен датчик угловой скорости на базе модуляционного гироскопа (см. патент RU 2276773 С2, 25.05.2004 года). Уникальность такого датчика угловой скорости состоит в том, что в нем принципиально отсутствует тренд (медленное изменение точностного параметра во времени) и гистерезис. Независимость точности модуляционного гироскопа от его кинетического момента (в первом приближении) принципиально отличает этот ДУС (датчик угловой скорости) от других существующих ДУСов.
Однако, как показала практика работы с таким ДУСом, примененный в нем электродвигатель шагового типа, служащий для вращения ротора ДУСа, а также газодинамические сферические опоры (ГДО), используемые вместо шарикоподшипниковых опор, ресурс которых в сотни раз меньше, имеет существенный недостаток: нестабильность запуска ГДО с шаговым двигателем. Применение же синхронной гистерезисной электрической машины в данном ДУСе недопустимо из-за нестабильности электромагнитной составляющей вибротяжения от пуска к пуску. В отличие от двигателя шагового типа, где постоянные магниты жестко привязаны к моментам инерции ротора от пуска к пуску, в синхронной гистерезисной машине после каждого очередного пуска вектор электромагнитной составляющей вибротяжения (вектор намагниченности викаллоя) занимает разное положение после вхождения двигателя в синхронизм по отношению к моментам инерции ротора. Доля такой погрешности доходит до 20-30% от суммарного случайного ухода (дрейфа) ДУСа. Поэтому в модуляционном ДУСе (ДУСе на базе модуляционного гироскопа) случайный дрейф от пуска к пуску такой же, как и в пуске.
В модуляционном ДУСе установлен шаговый электродвигатель (ШЭД), имеющий число пар полюсов р=9; число фаз m=2 и соответственно угловой шаг  . Каждый полюс ротора состоит из двух последовательных постоянных магнитов, между которыми в воздушном зазоре установлены фазные обмотки статора. Фазные обмотки не имеют собственного сердечника и расположены в разных плоскостях воздушного зазора. Электрическая схема фазных обмоток представлена на фигуре 1.
. Каждый полюс ротора состоит из двух последовательных постоянных магнитов, между которыми в воздушном зазоре установлены фазные обмотки статора. Фазные обмотки не имеют собственного сердечника и расположены в разных плоскостях воздушного зазора. Электрическая схема фазных обмоток представлена на фигуре 1.
Пуск такого ШЭД осуществляется постепенным увеличением частоты напряжения питания при соблюдении прямой последовательности направления вращения:
+2, -1, -2, +1; +2, -1 и т.д.
На фигуре 2 представлены графические зависимости вращающего момента ротора Мвр. от угла положения ротора α при постоянном токе в одной фазной обмотке Мвр.=К·I·f (α).
С учетом двух обмоток и двух направлений тока таких зависимостей существует четыре:
М+1=К·I·f+1 (α)
M-1=K·I·f-1 (α)
М+2=К·I·f+2 (α)
М-2=К·I·f-2 (α)
На фигуре 2 за нулевой угол α принято положение ротора в точке устойчивого равновесия +У1, в которую стремится ротор при прохождении по обмотке W1 постоянного тока положительного направления. При этом же токе при α=20° возникает точка неустойчивого равновесия +НУ1, из которой ротор стремится уйти в ту или другую сторону, а при точном расположении на +НУ1 - остается на месте.
Большая крутизна графика f (α) в районе сил выталкивания (+НУ1), по сравнению с его крутизной в районе сил втягивания (+У1), объясняется геометрической формой фазных обмоток.
Основным недостатком рассмотренного ШЭД является зависимость пуска от исходного углового положения ротора, которое является чисто случайно возникшим при остановке ротора после, от предыдущего вращения. Например, при нахождении неподвижного ротора в точке +НУ2 и использовании прямой последовательности, начинающейся с +2, пуск будет или невозможен (Мвр.=0), или первый пусковой момент может быть направлен в обратную сторону. Для устранения этого недостатка и обеспечения гарантированного трогания электродвигателя в прямом направлении ротор ШЭД должен быть предварительно установлен в оптимальное положение. Таким оптимальным положением ротора для приведенной выше последовательности включения является точка устойчивого равновесия +У1 (см. фигуру 2) и ее окрестности. Оптимальность точки +У1 определяется наличием первого положительного момента +2, а также отсутствием продольных сил, увеличивающих момент трогания на газодинамических сферических опорах модуляционного гироскопа.
Продольные силы вдоль оси ротора гироскопа Fпрод. для токов +1 и +2 приведены в уменьшенном масштабе на фигуре 2.
Предлагаемый алгоритм трогания ШЭД гарантирует предварительную установку ротора в выбранную оптимальную точку из любого случайного углового положения. Предварительная установка ротора осуществляется за счет поочередной подачи на фазные обмотки статора коротких постоянных сигналов, величина которых должна быть достаточна для преодоления момента трогания, а длительность должна быть больше времени возникшего затухающего переходного процесса колебаний ротора вокруг точки устойчивого равновесия. Например, установка в оптимальную точку +У1 может быть осуществлена предварительной подачей постоянного сигнала типа +1, но при этом необходимо учесть, что ротор придет в точку +У1 со всех положений, кроме положения НУ1 и его ближайших окрестностей. Чтобы исключить такой вариант, необходимо подать постоянный сигнал типа +2. Таким образом, подача постоянных сигналов с последовательностью:
+2, +1
гарантирует установку ротора в исходное положение, обеспечивающее пуск ШЭД в прямом направлении вращения при соблюдении прямой последовательности, начинающейся с +2.
Из анализа других возможных вариантов подачи первого пускового импульса можно сделать общий вывод, что для гарантированного трогания ШЭД ротор необходимо предварительно установить в оптимальную точку трогания. Для этого необходимо на обмотки статора подать друг за другом два постоянных коротких сигнала. Первый сигнал по полярности и обмотке должен соответствовать первому по времени пусковому импульсу прямой последовательности вращения, а второй сигнал по обмотке и полярности должен соответствовать последнему импульсу в цикле прямой последовательности вращения.
Алгоритм гарантированного трогания двухфазного шагового электродвигателя с активным ротором, частотным разгоном, повышенным моментом трогания и предварительной установкой ротора в угловое положение трогания в прямом направлении вращения для модуляционного гироскопа, отличающийся тем, что гарантированная установка ротора в угловое положение трогания осуществляется фазными обмотками статора за счет подачи в них коротких постоянных сигналов, величина которых достаточна для преодоления момента трогания, а длительность больше времени переходного процесса колебаний ротора вокруг точки устойчивого равновесия, по следующему алгоритму: установочных сигналов должно быть два и подаваться они должны по очереди; при этом первый сигнал по обмотке и полярности должен соответствовать первому пусковому импульсу прямой последовательности вращения, а второй сигнал по обмотке и полярности должен соответствовать последнему импульсу в цикле прямой последовательности вращения.
www.findpatent.ru
Точность работы целого ряда гироскопических приборов зависит от постоянства скорости вращения маховика гиромотора (точнее, от стабильности кинетического момента ротора гиромотора). Широко применяемые в гиромоторах асинхронные двигатели могут обеспечить постоянство скорости вращения маховика лишь с точностью 0,5…1 %. Для многих современных гироскопических приборов и систем этого совершенно недостаточно, поскольку требуется выдерживать постоянство скорости вращения маховика с точностью порядка сотых и тысячных долей процента. Такие точности могут быть обеспечены с помощью синхронных двигателей переменного тока. Как следует из названия двигателя, его ротор вращается с такой же скоростью, с какой вращается магнитное поле, создаваемое статором, то есть вращение поля и ротора одновременное (синхронное). Следовательно, чтобы обеспечить постоянство скорости вращения маховика, нужно обеспечить постоянство скорости вращения магнитного поля. А эта задача для современной техники уже вполне по силам.
Первый гиромотор с синхронным двигателем был создан советским инженером Б. А. Талалаем еще в 1926 г. Однако практического применения он не нашел, так как в то время особой потребности в таких гиромоторах не было, да и сам двигатель по многим показателям уступал асинхронным.
С конца 50-х годов в гиромоторах находят широкое применение синхронные гистерезисные двигатели.
«Гистерезисная машина» была предложена в 1900 г. выдающимся ученым-электротехником Ч. П. Штейнмецом, который за свои политические убеждения в конце прошлого века вынужден был иммигрировать из Европы в Америку. Немало трудностей пришлось преодолеть молодому иммигранту, прежде чем он сумел завоевать огромный авторитет и стать ведущим специалистом концерна «Дженерал электрик». За выдающиеся Достижения в области электротехники Ч. Штейнмеца называли «чудодеем электричества», а хозяева концерна откровенно говорили, что их главный капитал не в сотнях миллионов долларов, а в «гениальном мозгу доктора Штейнмеца». Великую Октябрьскую революцию Ч. Штейнмец встретил восторженно, оказывал посильную моральную помощь молодой Советской Республике, состоял в дружеской переписке с В. И. Лениным.
Статор его аналогичен статору асинхронного гиромотора, а вот ротор представляет собою кольцо, изготовленное из магнитотвердого материала, то есть из материала, пригодного для изготовления постоянных магнитов. Включенный в трехфазную электросеть, статор создает вращающееся магнитное поле, которое намагничивает ротор. В результате на роторе возникают северный и южный магнитные полюса. Теперь ротор очень напоминает стрелку магнитного компаса. А, как известно, на стрелку действует момент, который стремится совместить ее ось с направлением силовых линий магнитного поля Земли.
В гистерезисном двигателе роль направляющего магнитами того поля играет вращающееся магнитное поле статора. Магнитная ось ротора, стремясь совместиться с волной вращающегося магнитного поля, устремляется вслед за ней. Вращаясь, ротор преодолевает моменты сопротивления, поэтому догнать волну магнитного поля статора магнитная ось ротора не может, но через некоторое время, называемое временем входа в синхронизм, ротор приобретает так называемую синхронную скорость вращении, равную скорости вращения волны магнитного поля статора. В дальнейшем среднее значение синхронной скорости ротора выдерживается с высокой точностью. Теперь задача состоит в том, чтобы обеспечить высокую стабильность скорости вращения самого магнитного поля статора. Эта задача решается с помощью специальных электронных источников питания гиромотора, так на называемых статических преобразователей, имеющих очень высокую стабильность частоты выходного напряжения.
Надо сказать, что почти полвека изобретенный Ч. Штейнмецом синхронный гистерезисный двигатель не находил широкого применения. И только в конце 50-х гг., когда были созданы высококачественные магнитотвердые материалы для ротора, этот двигатель был с успехом применен в гиромоторах и в основном решил проблему обеспечения постоянства скорости вращения маховика.
Для многих приборов, применяемых в морском флоте, авиации, на космических кораблях, требуются гиромоторы, которые могли бы исправно работать длительное время — десятки тысяч часов и более. Доведенные до высокой степени совершенства, современные шариковые подшипники пока обеспечивают качественную работу гиромотора (в зависимости от скорости вращения маховика) в течение нескольких тысяч часов. В тех случаях, когда требуются особо длительные сроки работы гиромоторов, разработчики приборов вынуждены идти на снижение скорости вращения маховика, а это, как мы уже знаем, ослабляет полезные гироскопические эффекты и снижает точность приборов.
Основная причина, ограничивающая срок службы шариковых подшипников, — механический контакт между шариками и кольцами и как результат этого износ деталей подшипника, вызывающий недопустимые смещения центра масс и вибрацию ротора гиромотора.
Принципиальное решение этой проблемы ясно — нужно создать и применить бесконтактные опоры, к которым относятся опоры с газовой смазкой, магнитные и электростатические подвесы. Идея использования газа в качестве смазочного вещества, исключающего механический контакт между шипом (концом вала) и подшипником, а следовательно, и износ опоры, была высказана еще в середине прошлого века. Однако практическая реализация этой идеи началась лишь в конце 20-х гг., когда американская фирма «Сперри» создала гировертикаль, сферический ротор которой поддерживался над внутренней поверхностью сферической бронзовой чаши с помощью тонкой прослойки воздуха, нагнетаемого в зазор с помощью компрессора. В дальнейшем, вначале 50-х гг., была предложена конструкция газовой опоры, не требующая компрессора и другого вспомогательного оборудования. Оба конца (шипа) вала маховика устанавливались в цилиндрических отверстиях (подшипниках) в крышках гирокамеры. Причем зазор между шипом и подшипником составлял несколько микрометров. Пока вал не вращался, шипы лежали на подшипниках, в результате чего зазор между ними с каждой стороны имел вид изогнутого клина. Когда маховик с помощью двигатели приводился во вращение, то газ (чаще всего гелий), находившийся в зазоре и увлекаемый вращающимся шипом, также начинал вращаться и создавать радиальное давление в зазоре. Давление газа было больше в узкой части клинообразного зазора, и поэтому вал и маховик «всплывали» на тонкой газовой прослойке. После «всплытия» шипы вала вращались без механического контакта с подшипниками, и износа опор не происходило. Эта опора имеет много привлекательных качеств: она несложна но конструкции, исключает механический контакт, решая проблему долговечности, обеспечивает плавность, вращения маховика, обладает примерно такой же жесткостью, как и шариковый подшипник.
Но, к сожалению, опора не лишена и очень серьезных недостатков. Поскольку газовый подшипник может устойчиво работать лишь при относительно низких скоростях вращения вала (порядка 30 тыс. об/мин) и подъемная сила его при этих скоростях невелика, то гиромоторы с газовыми опорами строятся пока малогабаритными, с малыми кинетическими моментами. Во время запуска и остановок ротора гиромотора возникает механический контакт между шипом и подшипником и, следовательно, их износ. Чтобы свести износ к минимуму, многие детали гиромотора (в том числе шип и подшипник) делали из очень твердого и износоустойчивого материала — керамики. По этой причине первые гиромоторы с газовыми опорами называли керамическими. Теперь проблему износа решают напылением износостойкой пленки на рабочие поверхности шипа и подшипника.
Так как износ опор происходит лишь в моменты запуска и остановок, то срок службы гиромотора с газовыми опорами оценивается не числом часов работы, а числом запусков и остановок. Это число у современных гиромоторов составляет несколько сотен. Существенным недостатком гиромоторов с газовыми опорами является исключительная сложность их изготовления. Судите сами поскольку зазор между шипом и подшипником составляет единицы микрометров, то точность изготовления поверхностей шипа и подшипника должна составлять десятые доли микрометра. Это выполнить очень сложно вообще, а на твердых, плохо поддающихся механической обработке керамических деталях в особенности. Так что гиромоторы с газовыми опорами, принципиально решающие проблему долговечности гироприборов, нуждаются в дальнейшем совершенствовании.
В настоящее время промышленность выпускает большое количество разнообразных гиромоторов. Есть среди них миниатюрные — величиной с наперсток, а есть и гиганты— величиной с трехлитровую банку. Но наиболее широко применяются гиромоторы, относящиеся к «золотой середине», размером с небольшое яблоко. Однако даже они имеют весьма массивные маховики. Чтобы раскрутить эти маховики до рабочих скоростей, требуется несколько минут, а для более крупных гиромоторов — десятки минут.
Но во многих случаях столь длительный период подготовки к работе гиромотора недопустим. Иногда требуется, чтобы маховик набирал рабочую скорость за десятки секунд, единицы секунд и даже доли секунды. Чтобы обеспечить время разгона маховика порядка десятков и единиц секунд, электродвигатели гиромоторов проектируют специальным образом и подключают к специальным источникам питания, у которых величина и частота питающего напряжения изменяются по оптимальным, заранее рассчитанным программам.
В тех случаях, когда время разгона маховика должно составлять 1 секунду и менее, электродвигатели не применяют, так как они не обеспечивают столь малого времени разгона. В этих случаях или возвращаются к старинным методам (разумеется, значительно усовершенствованным) — к шнуру (гибкой стальной ленте), струе сжатого газа, или прибегают к ультрановым устройствам — пороховым ускорителям.
www.polnaja-jenciklopedija.ru


Асинхронные электродвигатели с короткозамкнутым ротором (“беличье колесо”) конструктивно выполнены по обращенной схеме - с вращающимся наружным ротором для создания наибольшего кинетического момента.Диапазон создаваемого кинетического момента - от 0,02 до 0,4 Н м с.Предназначены для работы в гироприборах в качестве чувствительного элемента.Синхронные гистерезисные электродвигатели также выполнены по обращенной схеме. При пуске и разгоне из-за гистерезиса материала ротора создается вращающий электромагнитный момент. При синхронизации потери на перемагничивание материала магнитопровода ротора отсутствуют, и двигатель работает как синхронный с магнитным возбуждением.Диапазон создаваемого кинетического момента - от 0,0005 до 0,02 Н м с.Предназначены для работы в гироприборах повышенной точности в качестве чувствительного элемента.

Асинхронные и синхронные гистерезисные выполнены по обращенной схеме с массивным маховиком. Имеют установочные места, расположенные перпендикулярно оси вращения маховика и предназначены для монтажа в гирораму подвеса.По конструкции - герметичные вакуумные, газонаполненные, либо открытого исполнения.Диапазон создаваемого кинетического момента - от 0,2 до 2 Н м с.Являются чувствительными элементами гироприборов и систем.


Выпускаются следующие типы гироскопов: - семейство малогабаритных трехстепенных управляемых гироскопов (МГТУ) с асинхронным гиродвигателем в кардановом подвесе; - семейство трехстепенных управляемых гироскопов (Д-7) с синхронным гистерезисным электродвигателем, ротор которого вращается на сферическом подшипнике. Обеспечивают измерение и управление по двум взаимно перпендикулярным осям в пространстве. Предназначены для работы в целом ряде гиросистем.


Индикаторные гироскопические стабилизаторы и координаторы предназначены для стабилизации и управления субблока аппаратуры относительно 2-х или 3-х взаимно перпендикулярных осей субблока и выдачи сигналов, пропорциональных углам поворота субблока в координатных осях карданова подвеса. Предприятие выпускает двух- и трехосные гиростабилизаторы. Конструктивно в состав гиростабилизатора входят: - платформа (рамка) с чувствительными элементами (гироскопами) на классическом или дуговом кардановом подвесе; - датчики стабилизации; - датчики угла; - датчики тахометрические (акселерометры). Применяются в гироскопических системах автоматического управления.
mzp.su