Материал из Википедии — свободной энциклопедии
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
<math>s= (n_1-n)/n_1 </math>,
где <math>n</math> — скорость вращения ротора асинхронного двигателя
<math>n_1</math> — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
<math>n_1=60 \times f/p</math>,
где f — частота сети переменного тока
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя имеет место в том случае, если на валу отсутствует нагрузка в виде рабочего органа или редуктора. При сборке нового двигателя всегда проводится испытания холостого хода, для того что бы определить потери в подшипниках, вентиляторе и магнитопроводе, а также узнать значения намагничивающего тока. Во время холостого хода скольжение составляет: S=0,01÷0,08.
Следует заметить, что так же существует режим идеального холостого хода, при котором n2=n1, что практически реализовать невозможно, даже если учесть, что нет силы трения в подшипниках. На самом деле, суть заключается в том, что асинхронному двигателю необходимо, чтобы ротор отставал от магнитного вращающегося поля статора. При отставании поле статора индуцирует магнитное поле в ротор, что заставляет его вращаться за полем статора.
15 го числа утром, на третий день после этого, у Слободского дворца стояло бесчисленное количество экипажей. Залы были полны. В первой были дворяне в мундирах, во второй купцы с медалями, в бородах и синих кафтанах. По зале Дворянского собрания шел гул и движение. У одного большого стола, под портретом государя, сидели на стульях с высокими спинками важнейшие вельможи; но большинство дворян ходило по зале.
wiki-org.ru
3. Принципы построения систем
частотного управления
3.1. Законы частотного управления
Под законами частотного
управления принято понимать зависимости между действующим напряжением на
статоре  и
частотой
и
частотой  , поддерживаемые
в установившихся режимах так, что при изменении с целью
изменения скорости вращения магнитного поля двигателя одновременно изменяется и
.
, поддерживаемые
в установившихся режимах так, что при изменении с целью
изменения скорости вращения магнитного поля двигателя одновременно изменяется и
.
Как известно, свойства двигателя в установившихся режимах работы можно описать с использованием схемы замещения.
Введем в рассмотрение относительную частоту  , где
, где  – номинальное
значение частоты. Любому текущему значению частоты питающего
напряжения соответствует угловая скорость вращения магнитного поля и всех результирующих
(обобщенных) векторов, равная
– номинальное
значение частоты. Любому текущему значению частоты питающего
напряжения соответствует угловая скорость вращения магнитного поля и всех результирующих
(обобщенных) векторов, равная  , где
, где  – число пар
полюсов. Номинальной частоте соответствует
номинальная скорость поля
– число пар
полюсов. Номинальной частоте соответствует
номинальная скорость поля  .
.
В теории частотного управления асинхронным двигателем вместо понятия «скольжение» используется понятие «абсолютное скольжение».
Так как скольжение S
равно  , где
, где  – механическая
угловая скорость вращения вала двигателя, то можно осуществить преобразование:
– механическая
угловая скорость вращения вала двигателя, то можно осуществить преобразование:
 .
.
Абсолютным скольжением bназывается величина
 .
.
Следовательно, между скольжением S и абсолютным скольжением b
существует соотношение  .
С учетом введенных обозначений схему замещения двигателя можно представить в
виде рис. 3.1.
.
С учетом введенных обозначений схему замещения двигателя можно представить в
виде рис. 3.1.
Возможно двухзонное частотное регулирование скорости, т. е. как в сторону уменьшения частоты, так и в сторону ее повышения по отношению к номинальной.
Во второй зоне регулирования ( )
частота напряжения изменяется при условии поддержания напряжения на неизменном
уровне, равном номинальному.
)
частота напряжения изменяется при условии поддержания напряжения на неизменном
уровне, равном номинальному.
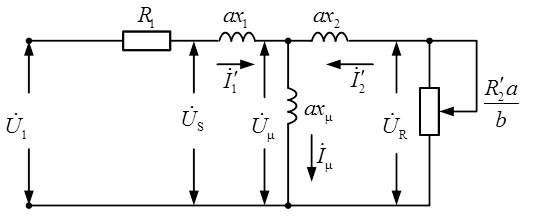
Рис. 3.1. Схема замещения асинхронного двигателя
при частотном управлении
В первой зоне регулирования ( )
одновременно со снижением частоты ниже номинального значения возникает
необходимость снижения напряжения. Это следует из уравнения
)
одновременно со снижением частоты ниже номинального значения возникает
необходимость снижения напряжения. Это следует из уравнения
 , где
, где  –
сопротивление статорных обмоток,
–
сопротивление статорных обмоток,  – ток
статора,
– ток
статора,  – число
витков фазных обмоток статора,
– число
витков фазных обмоток статора,  – обмоточный
коэффициент,
– обмоточный
коэффициент,  – магнитный
поток.
– магнитный
поток.
При незначительном ( ) диапазоне
регулирования скорости в первой зоне относительное значение падения
напряжения в первичной цепи невелико:
) диапазоне
регулирования скорости в первой зоне относительное значение падения
напряжения в первичной цепи невелико:
 .
.
Из последнего выражения следует, что при  снижение
частоты приводит к увеличению потока двигателя.
снижение
частоты приводит к увеличению потока двигателя.
Существенное увеличение магнитного потока нежелательно, т. к.
это вызывает насыщение магнитной цепи, значительное увеличение тока намагничивания.
Так, уже изменение на
10 % приводит к увеличению намагничивающего тока на 20–30 %. Изменение частоты
в более широких пределах приводит к более существенному увеличению  . Отмеченное
обстоятельство ведет к интенсивному нагреванию двигателя, снижению его
энергетических показателей и срока службы.
. Отмеченное
обстоятельство ведет к интенсивному нагреванию двигателя, снижению его
энергетических показателей и срока службы.
Нежелательно также существенное снижение магнитного потока, т. к. при этом снижается перегрузочная способность двигателя с одновременным перегревом двигателя, что следует из выражения
 , где k– конструктивный
коэффициент,
, где k– конструктивный
коэффициент,  – ток ротора,
– ток ротора,  –
коэффициент мощности вторичной цепи.
–
коэффициент мощности вторичной цепи.
В связи с изложенным при построении систем частотного регулирования
скорости асинхронного двигателя вниз от основной скорости () стремятся
поддерживать магнитный поток примерно на том же уровне, который обеспечивается
при номинальном режиме работы двигателя. При этом используется один из следующих
законов регулирования:
 (3.1)
(3.1)
 (3.2)
(3.2)
 (3.3)
(3.3)
 (3.4)
(3.4)
Наиболее простой закон (3.1) используется при необходимости регулирования скорости в небольшом диапазоне, когда падение напряжения в обмотках статора мало влияет на величину тока намагничивания.
Исходя из баланса активной мощности в роторе [9]
 .
.
Определяя ток ротора  из
схемы замещения (рис. 3.1) и пренебрегая сопротивлением
из
схемы замещения (рис. 3.1) и пренебрегая сопротивлением  статорной
обмотки, можно получить следующее приближенное выражение для электромагнитного
момента двигателя:
статорной
обмотки, можно получить следующее приближенное выражение для электромагнитного
момента двигателя:
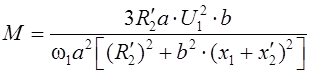 .
.
Определив из (3.5) известными способами критическое
значение абсолютного скольжения  и
учитывая, что
и
учитывая, что  ,
получим следующее выражение для критического момента:
,
получим следующее выражение для критического момента:
 .
.
Следовательно, при рассмотренных условиях во всем диапазоне регулирования скорости поддерживается постоянство перегрузочной способности двигателя, под которой понимают величину
 .
.
Системы частотного регулирования, реализующие закон регулирования
(3. 1), обеспечивают диапазон регулирования скорости до  при статизме
механической характеристики в пределах 5–10 %.
при статизме
механической характеристики в пределах 5–10 %.
Для момента сопротивления  ,
зависящего от скорости, закон регулирования (3.4) можно заменить следующими
законами [9]:
,
зависящего от скорости, закон регулирования (3.4) можно заменить следующими
законами [9]:
 при
при  ,
,
 при
при  ,
,
при  .
.
Однако, как показано в [1], во всех случаях удовлетворительные результаты обеспечивает закон (3.4).
vunivere.ru
скольжение — сдвиг, плавное движение; сползание, глиссирование, портаменто, глиссада, съезжание, микроскольжение, юз, серфинг Словарь русских синонимов. скольжение сущ., кол во синонимов: 12 • глайд (2) • … Словарь синонимов
СКОЛЬЖЕНИЕ — (1) самолёта боковое движение самолёта в результате поворота вокруг вертикальной оси; (2) электродвигателя разность скоростей (см.) и ротора асинхронной (см.), отнесённая к частоте вращения поля. Скольжение часто измеряют в процентах; оно… … Большая политехническая энциклопедия
СКОЛЬЖЕНИЕ — СКОЛЬЖЕНИЕ, скольжения, мн. нет, ср. Действие и состояние по гл. скользить. Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
скольжение — СКОЛЬЗИТЬ, льжу, льзишь; несов. Толковый словарь Ожегова. С.И. Ожегов, Н.Ю. Шведова. 1949 1992 … Толковый словарь Ожегова
скольжение — — [В.А.Семенов. Англо русский словарь по релейной защите] Тематики релейная защита EN slip … Справочник технического переводчика
Скольжение — [slip, slide, glide] 1. Сдвиг одной части монокристалла или зерна относительно другой при пластической деформации в результате перемещения дислокаций в плоскости скольжения. 2. Характеристика процесса волочения, определяющая несоответствие… … Энциклопедический словарь по металлургии
Скольжение — В этой статье отсутствует вступление. Пожалуйста, допишите вводную секцию, кратко раскрывающую тему статьи. Скольжение: Скольжение (авиация) Тепловое скольжение Скольжение асинхронного двигат … Википедия
скольжение — 3.15 скольжение: Разностная/дифференциальная скорость от скорости вращения колеса и линейной скорости вагона. Источник: ГОСТ Р 55182 2012: Вагоны пассажирские локомотивной тяги. Общие технические требования … Словарь-справочник терминов нормативно-технической документации
Скольжение — в асинхронной электрической машине, безразмерная величина, равная разности частоты вращения магнитного поля n1 и частоты вращения ротора машины п2, отнесённой к n1: S = (n1 п2)/n1. С. основной параметр асинхронной электрической машины (См … Большая советская энциклопедия
Скольжение — Glide Скольжение. (1) То же самое Slip Скольжение. (2) Некристаллографическое сдвигающее перемещение одних зерен относительно других. (Источник: «Металлы и сплавы. Справочник.» Под редакцией Ю.П. Солнцева; НПО Профессионал , НПО Мир и семья ;… … Словарь металлургических терминов
dic.academic.ru
Устройство трехфазных асинхронных двигателей.
Асинхронные двигатели являются простейшими из электрических машин. Любой из них имеет две обязательные части — неподвижный статор и вращающийся ротор. Для всех трехфазных асинхронных двигателей статоры выполнены конструктивно одинаковыми, но по устройству обмотки ротора двигатели должны быть подразделены на два типа — с короткозамкнутой обмоткой (короткозамкнутые) и с фазной обмоткой (двигатели с фазным ротором, носящие также название двигателей с контактными кольцами).
Трехфазный двигатель предназначен для включения в трехфазную сеть, поэтому он обладает обмоткой статора, составленной из трех фазных обмоток, при прохождении через которые токи, поступающие из промышленной трехфазной сети, возбуждают вращающееся магнитное поле. Это поле, пересекая проводники обмотки ротора, наводит в них ЭДС, благодаря чему в замкнутых обмотках ротора течет ток. Взаимодействие вращающегося магнитного поля, создаваемого переменным током в обмотке статора и проводниками с током в обмотке ротора приводит к возникновению вращающего момента. Так как вращение магнитного поля статора происходит асинхронно с вращением ротора, двигатель называют асинхронным.
На рис. 1 схематически представлена конструктивная схема поперечного разреза асинхронного двигателя, состоящего из корпуса (станины) статора 1, отлитой из чугуна, стали или алюминиевого сплава и закрепляемой на специальной опоре 5, называемой лапой.
В станину установлен сердечник статора 2, выполненный в виде полого цилиндра, собранного из отдельных тонких листов специальной электротехнической стали, изолированных друг от друга лаком, обладающим высокими диэлектрическими свойствами для уменьшения потерь мощности в магнитопроводе на гистерезис и вихревые токи. Сердечник закрепляется внутри станины с помощью прокладок 4, сделанных из немагнитного материала во избежание образования в них магнитных полей и, следовательно, вихревых токов.
 Рис. 1
Рис. 1
|
По внутренней поверхности сердечника статора прорезаны специальные пазы 3, в которые укладываются три одинаковые фазные обмотки, сдвинутые на угол 1200. Обмотки выполняются изолированным медным или алюминиевым проводом и закрепляются в пазах специальными диэлектрическими клиньями. Фазные обмотки соединены между собой треугольником или звездой в зависимости от величины подводимого к двигателю напряжения.
Ротор асинхронного двигателя собирается, как и статор, из тонких лакированных листов электротехнической стали, оснащается пазами, в которые уложена и закреплена обмотка ротора. Обмотка ротора может быть, как уже указывалось выше, короткозамкнутой или фазной.
Скольжение и частота вращения ротора.
Частоту вращения магнитного поля относительно ротора, т.е. разность n1 – n2, называют скольжением. Обычно скольжение выражают в долях частоты вращения поля и обозначают символом s:
s = (n1 – n2)/ n1 .
Скольжение является одной из важнейших характеристик двигателя; через него выражаются ЭДС и ток ротора, вращающий момент, частота вращения ротора. Скольжение зависит от нагрузки на валу двигателя. Поскольку при нормальном режиме работы двигателя скольжение невелико, частота вращения двигателя мало отличается от частоты вращения поля.
studopedya.ru
Cтраница 1
Скольжение асинхронных электродвигателей является сложной функцией частоты и напряжения, а также момента сопротивления на их валу. [1]
Скольжение асинхронных электродвигателей при отклонениях напряжения и частоты от номинальных значений изменяется: оно уменьшается при увеличении напряжения и уменьшении частоты и увеличивается при уменьшении напряжения и увеличении частоты. [3]
Частота вращения или скольжение асинхронного электродвигателя может регулироваться за счет изменения напряжения на статоре с помощью регулятора переменного напряжения. [5]
Реле токовые переменного тока ( РЭВ-201Ч-РЭВ-204) на токи 0 6 - 630 А с регулировкой тока срабатывания 110 - 350 % от номинального тока применяют в схемах управления скольжением асинхронных электродвигателей. Реле включается в три фазы ротора и реагирует на изменение в нем тока. [6]
Токовое реле РЭ-5400 с втягивающими катушками на токи от 5 до 600 А, с регулировкой тока срабатывания в пределах 110 - 350 % от / ном и трехфазные реле РЭ-5600 максимального тока ( рис. 26, б) предназначены для управления скольжением асинхронных электродвигателей. Реле включается в три фазы ротора и реагирует на изменение тока в нем. Катушки реле рассчитаны на ток силой 5 А; уставка тока срабатывания может быть отрегулирована в пределах от 50 до 140 % / ном. [7]
Если бы ротор мог вращаться с синхронной скоростью, то его скольжение было бы равно при этом нулю. Поэтому можно сказать, что скольжение асинхронного электродвигателя может изменяться в пределах от нуля до единицы. [8]
Кроме указанных преимуществ закритического режима следует обратить внимание на малые изменения амплитуд и углов сдвига фаз при некоторых изменениях скорости вращения ротора в процессе уравновешивания. Это может иметь место, например, за счет скольжения асинхронного электродвигателя, если при этом добротность системы не ниже пяти и скорость вращения ротора не менее, чем в 3 раза превосходит собственную частоту колебаний системы. [9]
На основе результатов исследования вибрационных характеристик насосных агрегатов магистральных нефтепроводов разработаны основные технические требования к контрольно-сигнальной виброаппаратуре, предназначенной для автоматической защиты этих агрегатов от повышенных вибраций. Уровень вибрации агрегатов нестабилен и колеблется с частотой, равной удвоенной частоте скольжения асинхронного электродвигателя. Между тем, вибрация насосного агрегата может быть зафиксирована по увеличению вибрации в частотном диапазоне от 50 до 400 гл. Частотный диапазон виброаппаратуры может быть ограничен пределами от 40 до 500 гц, диапазон измерений - от 1 8 до 1 8 мм / сек. [10]
В некоторых случаях для испытания изоляции индуктированным напряжением применяют те же генераторы, что и для опыта холостого хода. Получение от генератора двойного напряжения при 100 гц достигается применением двухскоростного асинхронного электродвигателя в качестве привода к генератору. В этом случае из-за скольжения асинхронного электродвигателя частота генератора будет отличаться от номинальной ( 50 гц), что потребует согласно ГОСТ 3484 - 65 внесения поправок на результаты измерения потерь холостого хода и напряжения короткого замыкания испытуемого трансформатора. [12]
Определяют сопротивление отдельных электродвигателей к моменту подачи напряжения на сборные шины, к которым они присоединены. Следует иметь в виду, что в широких пределах изменения скольжения асинхронных электродвигателей, как было показано выше ( см. рис. 3 - 7), их эквивалентное сопротивление можно считать чисто индуктивным. Это значительно облегчает расчеты. [13]
Страницы: 1
www.ngpedia.ru