





 ЛИНЕЙНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ
ЛИНЕЙНЫЕ ШАГОВЫЕ ДВИГАТЕЛИ просмотров - 123
аговые двигатели, рассмотренные выше, являются вращающимися машинами с обеспечением вращения как по ходу, так и против хода часовой стрелки. При этом большое число механизмов требует линейного перемещения рабочих органов (координатные перемещения механизмов подач станков с ЧПУ, графопостроителей ЭВМ, механизмов печатающих устройств ЭВМ, промышленных роботов и т.д.). В этих случаях преобразование вращательного движения в поступательное осуществляется с помощью различных кинематических механизмов. Последние являются источни-ками потерь мощности и, что особенно важно для прецизионных меха-низмов, вносят погрешность при отработке координатных перемещений. Применение линейных шаговых двигателей (ЛШД) позволяет упростить кинематическую схему, устранив элементы, преобразующие вращательное движение в поступательное. ЛШД обеспечивают линейное переме-щение рабочих органов. Видов линейных двигателей так же много, как и вращающихся; существуют линейные двигатели постоянного тока, асинхронные, синхронные и вентильные. ЛШД обладают известными преимуществами обычных вращающихся ШД и подобно им бывают реактивными (ЛШД-Р), с постоянными магнитами (индукторными, гибридными) – ЛШД-И. Не различаются они также по принципу действия.
ЛШД можно представить как развернутый на плоскости ШД вращательного типа. В качестве примера рассмотрим ЛШД-И с двумя обмотками управления, изображенный на рис.15.1.
Рис. 15.1. Конструкция индукторного ЛШД-И:
1 – обмотки; 2 – магнитопроводы ротора; 3 – постоянный магнит;
4 – статор; I - IV– полюсы ротора
Подвижная часть ЛШД, называемая ротором, выполнена из электротехнической стали в виде двух П-образных магнитопроводов 2, на каждом из которых размещено по одной обмотке управления 1. Статор 4 представляет собой плиту из магнитомягкого материала; полюсы ротора и поверхность плиты, обращенная к нему, имеют зубчатую структуру. Подмагничивание магнитопроводовосуществляет постоянный магнит 3. Зубцовые деления тг статора и ротора равны. Зубцы полюсов ротора одного и того же магнитопровода сдвинуты относительно зубцов статора на тГ/2 (для полюсов Iи II) и на тГ/4 (для полюсов IIIи IV). В результате такой конструкции зубцы всех полюсов ротора имеют различное расположение относительно зубцов статора, но магнитное сопротивление потоку подмагничивания не зависит от перемещения ротора. Принцип работы ЛШД не отличается от ШД-И, с тем лишь иск-лючением, что вместо вращающего момента создается сила F, направленная в плоскости статора. Учитывая зависимость отналичия возбуж-дения обмоток ось магнитного потока перемещается от полюса к полю-су, к примеру по схеме I–III–II–IV,в результате чего ротор перемещается на величину зубцового деления хГ. В каждом такте коммутации линей-ный шаг
Δx=τ2/k1,
где к1 – число тактов коммутации.
На основании рассмотренного ЛШД можно построить модуль, обес-печивающий перемещение одновременно по нескольким координатам. При этом отдельный ЛШД предназначен для перемещения лишь по од-ной координате.
Пример двухкоординатного модуля ЛШД приведен на рис. 15.2.
Рис. 15.2. Конструкция двухкоординатного линейного модуля (а)
и расположение его составных частей (б): 1 – ротор; 2 – статор;
3,4 – электромагнитные модули; 5 – постоянные магниты;
6 – обмотки возбуждения
Он состоит из магнитопровода подвижного ротора 1 и статора 2, представляющего собой плиту из магнитомягкого материала. На рабочей поверхности плиты выполнены две системы взаимно перпендикулярных зубцов. На роторе 1 расположены две системы электромагнитных моду-лей 3 и 4, предназначенных для перемещения по двум координатам (XY). Соответственно каждый модуль состоит из постоянных магнитов 5 и обмоток возбуждения 6. Модули, предназначенные для перемещения вдоль оси X, имеют зубцы, направленные вдоль этой оси. Это же касается оси Y. Принцип управления обмотками модулей по каждой из координат такой же, как и в однокоординатном модуле (см. рис.15.1). Для уменьшения сил трения в модулях на основе ЛШД применяют магнитно-воздушную подвеску. Ротор притягивается к статору магнит-ным притяжением полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, который приподнимает его над стато-ром. Между статором и ротором образуется воздушная подушка, в ре-зультате чего ротор подвешивается над статором с некоторым мини-мальным воздушным зазором. При этом и сопротивление движению ротора близко к нулю. Высокая точность позиционирования обеспе-чивается максимально мелкой нарезкой зубцовых делений. Приведем некоторые параметры модулей ЛШД: шаг 0,16; 0,32; 0,50 мм; максимальное усилие 84; 70; 20 Н. Воздушный зазор между статором и ротором составляет 15 мкм.
Ш аговые двигатели, рассмотренные выше, являются вращающимися машинами с обеспечением вращения как по ходу, так и против хода часовой стрелки. Однако большое число механизмов требует линейного перемещения рабочих органов (координатные перемещения механизмов... [читать подробенее]
oplib.ru
Рассмотрим принцип построения линейного шагового двигателя. К линейному двигателю можно перейти, если представить обычный шаговый двигатель как обращенную машину с заторможенным ротором вокруг, которого может вращаться подвижный «статор» при коммутации его обмоток. Если разрезать такой обращенный двигатель и развернуть его в линейную конструкцию, то ротор превратится в линейку с зубцами, вдоль которой будет шагать плоский «статор» - индуктор при каждой коммутации его обмоток. Поскольку геометрические расположения зубцов индуктора и линейки аналогично их расположению в обращенном двигателе, принцип работы не нарушится. Размер индуктора будет соответствовать развернутому статору, а размеры линейки можно не отграничивать. После перемещения на одно зубцовое деление положение индуктора на линейке будет повторяться (краевые эффекты на месте разреза статора оставляем без внимания).
Шаговый двигатель автомата сборки плат представляет собой плоский двухкоординатный развернутый двигатель как два линейных индуктора, перемещающихся по поверхности плиты, изготовленной из малоуглеродистой стали (рис.4). На плите нанесены две перпендикулярная зубцовые нарезки с шагом (периодом) 1,28 мм. Пазы зубцов заполнены эпоксидным компаундом, плита отшлифована. Оба индуктора представляют единую конструкцию, перемещающуюся во взаимно перпендикулярных направлениях, по координатам X,Y. На корпусе индуктора (рис.3) закреплены модули однократного перемещения: одна пара модулей обеспечивает движение индуктора относительно оси X, а вторая – относительно оси Y прямоугольной системы координат.
Для снижения трения между индуктором и плитой в зазор между ними нагнетается воздух для создания воздушной подушки. Кроме того в рассматриваемой конструкции индуктор располагается под плитой и удерживается в соприкосновении с ней с помощью магнитного притяжения и напоминает муху, перемещающуюся на потолке.
 |
Рис. 3. Индуктор:
1 – корпус индуктора; 2 – модуль однократного перемещения

Рис.4. Плита:
1 – плита, 2 – эпоксидный компаунд
Модуль однократного перемещения представляет собой группу постоянных магнитов, собранных пакетами, на которых намотаны обмотки, объединенные корпусом с установленными на нем жиклерами (рис. 5).
На рабочей поверхности пакетов нанесена продольная зубцовая нарезка с шагом 1,28 мм, пазы которой заполнены эпоксидным компаундом. Сжатый воздух, поступающий через калиброванные отверстия жиклеров, обеспечивает воздушный зазор между плитой и рабочей поверхностью корпуса модуля однократного перемещения.

Рис.5. Модуль однократного перемещения:
1 – комплектный пакет; 2 – постоянный магнит; 3 – обмотки;
4 – жиклеры; 5 – корпус; 6 – плита
Перемещение индуктора по плите происходит в результате изменения токов в электромагнитах. Схема линейного шагового двигателя по одной координате приведена на рис.6.

Рис.6. Схема линейного шагового двигателя
Зубцы полюса 2 смещены относительно зубцов полюса 1 на одну четверть зубцового деления плиты (1/4 Т), относительно полюса 3 – на 1/4 и полюса 4 – на 3/4 Т, где Т – период нарезки плиты.
При возбуждении катушки А без возбуждения катушки В через полюс 2 проходит максимальный магнитный поток, так как направления потоков постоянного магнита и катушки в нем совпадают. Через полюс 1 проходят встречные магнитные потоки, суммарный поток равен нулю. Поэтому индуктор установлен так, что зубцы полюса 2 устанавливаются напротив зубцов плиты (максимум магнитной проводимости).
При возбуждении только катушки В максимальный магнитный поток проходит полюс 3, его зубцы устанавливаются напротив зубцов плиты, при этом индуктор перемещается на четверть шага. При реверсировании тока в катушке А и отсутствии тока в катушке В зубцы полюса 1 устанавливаются напротив зубцов плиты, индуктор перемещается на четверть шага. При реверсировании тока в катушке В и отсутствии тока в катушке А индуктор перемещается снова на четверть шага.
При питании катушек подачей постоянного тока в указанной последовательности линейный шаговый двигатель работает как обычный шаговый двигатель в полношаговом режиме, идет поступательное перемещение индуктора с шагом, равным четверти периода нарезки зуба при каждой коммутации обмоток.
 |
Рис. Векторная диаграмма полношагового режима
Вектор магнитного поля каждый раз смещается на четверть
нарезки, т.е. на 1,28/4=0,32мм. Это полношаговый режим двигателя, его векторная диаграмма представлена на рис. В целях обеспечения максимальной линейности, позиционной точности, а также большей тяговой силы в линейном развернутом шаговом двигателе двухфазные элементы объединены в индукторе, образуя четырехфазную систему. Двухфазные элементы закреплены в корпусе модуля линейного однокоординатного со смещением, эквивалентном фазовому сдвигу в 45º. Фазовые соотношения катушек (А, В) и (С, D) в виде векторной диаграммы изображены на рис.7.
 |
Рис.7. Векторная диаграмма соотношения фаз индуктора
При импульсном и раздельном питании обмоток A,B,C,D величина перемещения составит 1,28мм/8 = 0.16мм (полношаговый режим), а при коммутации по циклу включения одной и двух обмоток A, AC. C, CB, B и т. д. дискретное перемещении индуктора составит 1,28/16= 0.08мм. При подаче синусоидального тока на катушку А и косинусоидального тока на катушку В, линейный шаговый двигатель работает как двухфазный синхронный двигатель, вектор магнитного поля которого перемещается с частотой питания обмоток и обеспечивает непрерывное перемещение индуктора по плите.
Для создания режима дискретного перемещения и обеспечения режима позиционирования с дискретностью в 0,01мм питание на каждую катушку двигателя подается в виде ступенчатых синусоидальных волн. Так как период нарезки зубцов составляет 1,28 мм, то для обеспечения дискретности перемещения индуктора на 0,01 мм период синусоидального тока делится на 128 частей. Такой режим питания обмоток обеспечивает векторную диаграмму, состоящую из 128 векторов в фазном пространстве 360 эл. град. При смещении вектора на 128 периода индуктор перемещается на 1/128 зубцового деления, т.е. на 1,28мм/128=0,01мм. Такой дискретный режим формирования поля статора носит название дробления шага. Вектор магнитного поля на каждый импульс системы управления перемещается на 360/128 =180/64=90/36 =2,5 эл. град. Амплитуды питающих обмотки токов должны формироваться по законам синуса и косинуса, фазы которых формируются ступенчато с шагом в 2.5 градуса. Набор таких синусно-косинусных значений формируется с помощью запоминающих устройств по 128 значений адреса (0….127), которые сканируются периодически с помощью двоичных счетчиков с частотой поступающих импульсов. Число этих импульсов определит величину перемещения индуктора, а частота - скорость перемещения.
Блок управления линейным шаговым двигателем
Блок управления линейным шаговым двигателем (БУЛШД) обеспечивает питание и управление двигателем. БУЛШД получает импульсы перемещения от управляющей IBM PC. Цифроаналоговые решающие устройства преобразуют эти импульсы в ступенчатые формы с синусоидальными и косинусоидальными амплитудами. Усилители мощности принимают сигналы управления с цифро-аналоговых преобразователей, усиливают по мощности и подают на катушки индуктора. Обратная связь в усилителях мощности обеспечивает в катушках индуктора ток, пропорциональный входному напряжению. Для каждой фазы индуктора имеется усилитель мощности.
В блоке управления шаговым двигателем используются 2 платы ЦАП – для двух координат, 4 платы усилителя мощности – управляющие восьмью фазами шагового двигателя.
Структурная схема БУЛШД для управления одной координатой представлена на рис.8.

Рис.8. Структурная схема блока управления линейного ШД
Принципиальная схема ЦАП представлена на рис.9.
В АСП-902 используется 2 платы ЦАП. При подаче частоты на вход 2 микросхемы D1 на выходе триггера, выполненного на микросхеме D4, формируется сигнал, разрешающий дальнейшее прохождение частоты на суммирующие входы счетчиков D10, D11, при этом счет осуществляется от 0 до 127, за счет сброса счетчиков по R-входу.
С выхода триггера D9 и счетчиков D10 и D11 сигнал в виде двоичного кода поступает на информационные входы ППЗУ, выполненные на микросхемах серии КР556РТ4 (D17-D24), запрограммированных для каждой фазы двигателя. С выхода ППЗУ для каждой фазы двигателя код в виде 8-разрядного слова поступает на цифроаналоговый преобразователь, выполненный на микросхеме серии К 572 ПА1А. С помощью старшего разряда, поступающего с ППЗУ на транзисторный ключ, выполненный на элементах Т3, Д33, происходит формирование отрицательной части синусоиды.
Выходной сигнал цифроаналогового преобразователя усиливается с помощью масштабного усилителя D29 для фазы двигателя А. При этом осуществляется движение индуктора в определенную сторону.
При подаче частоты на вход 5 микросхемы D1 на выходе триггера, выполненного на микросхеме D4, формируется сигнал, разрешающий прохождение частоты на вычитающие входы счетчиков D10, D11,при этом счет осуществляется в обратном порядке от 127 до 0 за счет подачи короткого импульса по старшему разряду счетчика D11 на входы счетчиков D10, D11. При этом осуществляется смена направления движения индуктора.
Смену направления движения индуктора можно осуществить за счет подачи сигнала 0 или 1 с программного устройства на вход А12 платы ЦАП. Для этого необходимо убрать перемычки между клеммами XS1 и XS3, XS2 и XS5 и установить перемычки между клеммами XS3 и XS4, XS5 и XS6.
Принципиальная схема усилителя мощности (УМ) представлена на рис.10.

Рис.10. Принципиальная схема усилителя мощности
Усилитель мощности представляет собой управляемый источник тока, который по сигналам с цифроаналогового преобразователя подает в обмотки индуктора ток от 1,5 до 3,0 А, в зависимости от исполнения усилителя.
Конструктивно на одной плате усилителя мощности размещены два каскада, предназначенных для двух фаз линейного двигателя. Сигнал управления подается на контакты А1 усилителя. Входы Б1 используются для сигналов торможения, т.е. для сигналов устранения колебаний с демпфера ( в АСП-902 не используется).
В качестве входного каскада в усилителе используются транзисторы КТ815Г и КТ814Г. Выходными транзисторами служат КТ808А, на которых выделяется значительная мощность, поэтому они закреплены на радиаторы, для каждого выходного транзистора свой радиатор.
Для устранения возбуждений в схеме усилителя имеются корректирующие цепи С2 и С3. Цепи С1, С4, R17 используются для создания форсирующего режима на каждый импульс, поступающий с программного устройства. Также для питания микросхем 155- и 556-й серий в БЛУШД имеется плата стабилизатора на 5В и 5А. Второй стабилизатор предназначен для питания аналоговых схем и настраивается на напряжение +15 и -15В.
Для формирования нестабилизированных переменных напряжений, амплитудой 8,4 и 14,5В, применена силовая панель. Силовая панель питает усилители мощности и индуктор ШД.
Читайте также:
megalektsii.ru
Изобретение относится к электротехнике, а именно к шаговым двигателям. Технический результат изобретения, заключающийся в упрощении конструкции двигателя, достигается путем того, что в линейном шаговом электродвигателе, содержащем корпус, подвижный упругий элемент, контактирующий с ведомым звеном в виде стержня, и две обмотки, подключенные к импульсному источнику питания, подвижный упругий элемент выполнен в виде замкнутой цилиндрической камеры с осевым отверстием, заполненной ферромагнитной жидкостью и имеющей выполненную из эластичного материала внутреннюю цилиндрическую стенку, стержень ведомого звена размещен коаксиально и свободно в осевом отверстии камеры, а обмотки установлены в корпусе с охватом стержня симметрично по обе стороны камеры и разделены с торцевыми поверхностями последней, прикрепленными к обмоткам упругими кольцевыми прокладками, при этом камера снабжена регулируемыми ограничителями осевых шаговых перемещений в виде резьбовых втулок, навернутых на края наружной поверхности камеры. 1 ил.
Изобретение относится к электротехнике и может быть использовано в устройствах с поступательным дискретным движением рабочего органа, например в роботах-манипуляторах в устройствах автоматики, в системах электропривода подачи металлорежущих станков.
Известен электромагнитный линейный двигатель, содержащий два электромагнита с катушками, якорями и магнитопроводами с фиксаторами, взаимодействующими с зубчатой рейкой, причем один электромагнит расположен внутри другого, а якорь каждого электромагнита жестко связан с магнитопроводом другого электромагнита /см. а.с. СССP 957366, кл. Н 02 К 41/03, 1982 [1]/. Недостатками данного двигателя являются сложность конструкции, значительные вес и габариты, а также значительное потребление электроэнергии вследствие необходимости перемещения в процессе работы всего электродвигателя. Известен также электромагнитный линейный двигатель, содержавший электромагнит в виде корпуса со стопорными элементами, входящими в зацепление с упорами направляющих, цилиндрического магнитопровода, катушки возбуждения с воздушным зазором и ферромагнитного сердечника, установленного в зазоре и соединенного с помощью стержней и пружины сжатия с ограничителями перемещения и фланцем /см. а.с. СССР 1483563 кл. Н 02 К 41/03, 1987 [2]/. Недостатками данного устройства также являются сложность конструкции вследствие необходимости перемещения за два такта с поочередной фиксацией фланца и корпуса, а также значительное потребление электроэнергии вследствие необходимости перемещения в процессе работы большой массы всего двигателя вместе с корпусом. Кроме того, известен линейный шаговый электродвигатель, содержащий ферромагнитную направляющую и два электромагнита с обмотками и фиксаторами, размешенные в немагнитном корпусе, заполненном ферромагнитной жидкостью /см. а.с. СССР 1363395, кл. H 02 К 41/03, 1986 [3]/. Недостатками данного устройства являются значительная сложность конструкции и эксплуатации, значительное потребление электроэнергии, а также низкая надежность. Это объясняется наличием значительного числа связанных между собой узлов, включением в один такт рабочего процесса целого ряда последовательных циклов: фиксация первого электромагнита, подача напряжения на оба электромагнита, фиксация второго электромагнита, новая подача напряжения на оба электромагнита и т.д., а также необходимость перемещения двух электромагнитов вместе с корпусом и жидкостью, размещения всех вышеуказанных узлов внутри ферромагнитной жидкости в условиях относительных взаимных перемещений всех узлов: электромагнитов, фиксаторов, корпуса, направляющей, при необходимости сохранения полной герметичности. Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является линейный электродвигатель, содержащий корпус, источник магнитного поля с полюсами, подвижный гофрированный упругий элемент с жестко скрепленной на нем обмоткой, размещенной между полюсами источника и подключенной к импульсному источнику питания, а также ведомое звено, выполненное в виде стержня, установленного с натягом между гофрами упругого элемента /см. а. с 1365275, кл. Н 02 К 33/10, 41/03, 1986 [4]/, принятый за прототип. Недостатками устройства-прототипа являются сравнительно малое тяговое усилие и низкая надежность конструкции, что объясняется минимальным изменением радиальных размеров гофр при осевых деформациях упругого элемента, закреплением катушки с обмоткой непосредственно на подвижном упругом элементе и т.д. Сущность изобретения заключается в создании линейного шагового электродвигателя, в котором однонаправленное импульсное движение ведомого звена создается за счет формирования сил механического взаимодействия звена с помощью сил электрического взаимодействия обмотки и ферромагнитной жидкости в рабочие полупериоды движения. Технический результат - упрощение конструкции, увеличение тягового усилия и повышение надежности. Указанный технический результат при осуществлении изобретения достигается тем, что в известном линейном шаговом электродвигателе, содержащем корпус, подвижный упругий элемент, контактирующий с ведомым звеном в виде стержня, и две обмотки, подключенные к импульсному источнику питания, особенность заключается в том, что подвижный упругий элемент выполнен в виде замкнутой цилиндрической камеры с осевым отверстием, заполненной ферромагнитной жидкостью и имеющей выполненную из эластичного материала внутреннюю цилиндрическую стенку, стержень ведомого звена размещен коаксиально и свободно в осевом отверстии камеры, а обмотки установлены в корпусе с охватом стержня симметрично по обе стороны камеры и разделены с торцевыми поверхностями последней, прикрепленными к обмоткам упругими кольцевыми прокладками, при этом камера снабжена регулируемыми ограничителями осевых шаговых перемещений в виде резьбовых втулок, навернутых на края наружной поверхности камеры. Сущность изобретения поясняется чертежом, где схематично изображен предлагаемый двигатель, общий вид с центральным продольным разрезом. Линейный шаговый электродвигатель содержит корпус 1, упругий элемент, контактирующий с ведомым звеном в виде стержня 2, установленного в направляющих линейного перемещения 3, 4, и две обмотки 5, 6, подключенные к импульсному источнику питания /на чертеже не показан/, при этом подвижный упругий элемент выполнен в виде замкнутой цилиндрической камеры 7 с осевым отверстием 8, заполненной ферромагнитной жидкостью 9 и имеющей выполненную из эластичного материала, например из толстой фторопластовой пленки, внутреннюю цилиндрическую стенку 10, стержень 2 ведомого звена размещен коаксиально и свободно в осевом отверстии 8 камеры 7, а обмотки 5, 6 жестко установлены в корпусе 1 со свободным охватом стержня 2 симметрично по обе стороны камеры 7 и разделены с торцевыми поверхностями последней, прикрепленными к обмоткам 5, 6 упругими кольцевыми прокладками 11, 12, причем камера 7 снабжена регулируемыми ограничителями осевых шаговых перемещений в виде резьбовых втулок 13, 14, навернутых на края наружной поверхности камеры 7. На обмотках 5, 6 на внутренних, обращенных к камере 7 плоскостях, размещены жесткие кольцевые подложки /на чертеже не показаны/ для упора в них упругих прокладок 11, 12 и резьбовых втулок 13, 14. Таким образом, каждая из прокладок 11, 12 прикреплена одной своей плоскостью к соединенной с соответствующей обмоткой 5, 6 подложке, при этом другая плоскость прокладки 11, 12 контактирует с торцевой поверхностью камеры 7 без крепления к последней. Работа двигателя осуществляется следующим образом. При включенных обмотках 5, 6 камера 7 расположена симметрично между обмотками 5, 6, упругие прокладки 11, 12 не деформированы и контактируют с торцами камеры 7, жидкость 9 равномерно заполняет полость камеры 7, при этом упругая цилиндрическая стенка 10 камеры 7 также не деформирована, то есть между ней и стержнем 2 имеется радиальный зазор, дающий камере 7 возможность свободно смещаться в осевом направлении относительно стержня 2. Упругие прокладки 11, 12 имеют в осевом направлении минимальную жесткость на сжатие, достаточную только для приведения камеры 17 в указанное выше симметричное положение. При подаче импульса тока, например, в левую на чертеже обмотку 5 за счет действия электромагнитного поля обмотки 5 ферромагнитная жидкость 9 стремится сместиться влево в сторону обмотки 5. При этом с одной стороны вся камера 7 движется влево, сжимая упругую прокладку 11 и отходя от прокладки 12, а с другой стороны жидкость 9 деформирует внутрь упругую стенку 10 в левой части камеры 7, за счет этого камера 7 зажимает стержень 2, в результате чего стержень 2 смещается вместе с камерой влево. Осевой зазор между левым торцом резьбовой втулки 13 и обмоткой 5 заранее выставляется равным требуемой величине шага перемещения, поэтому стержень сместится влево только на величину шага. При отключении импульса тока в обмотке 5 жидкость 9 опять займет равномерно распределенное положение в камере 7, стенка 10 выпрямится, камера 7 отпустит стержень 2, прокладка 11 разожмется и вернет камеру 7 в исходное состояние. Естественно, при этом стержень 2 /ведомое звено/ останется в смещенном влево на шаг положении. Таким образом, обеспечивается поступательное движение ведомого звена 2 влево с необходимой и заранее задаваемой дискретностью позиционирования, то есть движение в шаговом режиме. Аналогично, при подаче и снятии импульсов тока в обмотку 6 происходит движение такого же характера вправо. Предложенное устройство в отличие от известных имеет предельно простую конструкцию, не требует специальной регулировки, также предельно просты режимы его работы. Узел с ферромагнитной жидкостью выполнен отдельно в виде специального герметичного модуля, токонесущие узла неподвижны и не контактируют с жидкостью, что обеспечивает высокую надежность конструкции. Заданным выбором электромеханических параметров конструкции: числом ампер-витков обмоток, массой ферромагнитной жидкости, жесткостью упругой стенки камере и т.д., можно добиться одновременно как значительных радиальных усилий по сжатию камерой ведомого звена, так и осевых усилий по смещению камеры вместе с ведомым звеном, то есть значительного тягового усилия.Формула изобретения
Линейный шаговый электродвигатель, содержащий корпус, подвижный упругий элемент, контактирующий с ведомым звеном в виде стержня, и две обмотки, подключенные к импульсному источнику питания, отличающийся тем, что подвижный упругий элемент выполнен в виде замкнутой цилиндрической камеры с осевым отверстием, заполненной ферромагнитной жидкостью и имеющей выполненную из эластичного материала внутреннюю цилиндрическую стенку, стержень ведомого звена размещен коаксиально и свободно в осевом отверстии камеры, а обмотки установлены в корпусе с охватом стержня симметрично по обе стороны камеры и разделены с торцевыми поверхностями последней, прикрепленными к обмоткам упругими кольцевыми прокладками, при этом камера снабжена регулируемыми ограничителями осевых шаговых перемещений в виде резьбовых втулок, навернутых на края наружной поверхности камеры.РИСУНКИ
Рисунок 1www.findpatent.ru
Изобретение относится к электромашиностроению, в частности к линейным шаговым двигателям, и может быть использовано преимущественно в устройствах ввода-вывода.
Известен линейный шаговый двигатель [RU 96111310 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены в виде двух или более пьезоблоков, расположенных в продольной плоскости друг за другом, причем первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами, а второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов, а подвижная часть расположена по оси двигателя и контактирует с разрезными подвижными элементами.
Недостатком такой конструкции является ограниченность функциональных и технологических возможностей.
Наиболее близким к предлагаемому изобретению является линейный шаговый двигатель [RU 96111526 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены из не менее двух пьезоблоков, причем каждый пьезоблок состоит из сдвигающего пьезоэлемента и фиксирующего пьезоэлемента, разделенных относительно друг друга, корпуса и фрикционного элемента изоляторами, а расположены пьезоблоки внутри корпуса в продольной плоскости друг за другом.
Недостатком такой конструкции является небольшие усилия хода при малых габаритах.
Задачей является расширение функциональных и технологических возможностей линейного шагового двигателя, достижение больших усилий хода при малых габаритах и массе, повышение точности позиционирования и упрощение его конструкции за счет применения рычагов в качестве приводного элемента.
Поставленная задача по первому варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, при этом соосно с рычагами расположены возвратные пружины, на подвижной части, выполненной в виде штока, расположены зацепы, на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по второму варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлена на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги выполнены с втягивающимся сердечником, а на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по третьему варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению ведена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлены на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов, корпус выполнен с возможностью перемещения по роликам, а подвижная часть закреплена на неподвижном механизме.
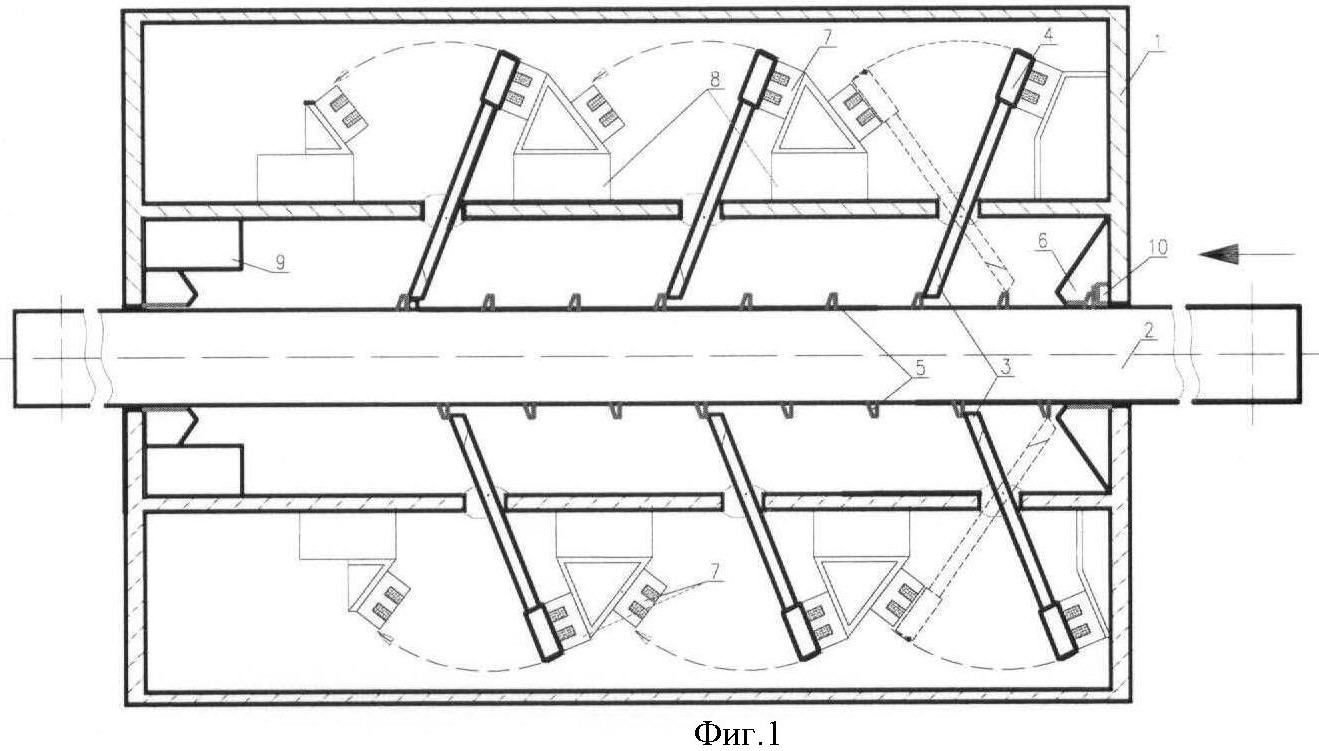
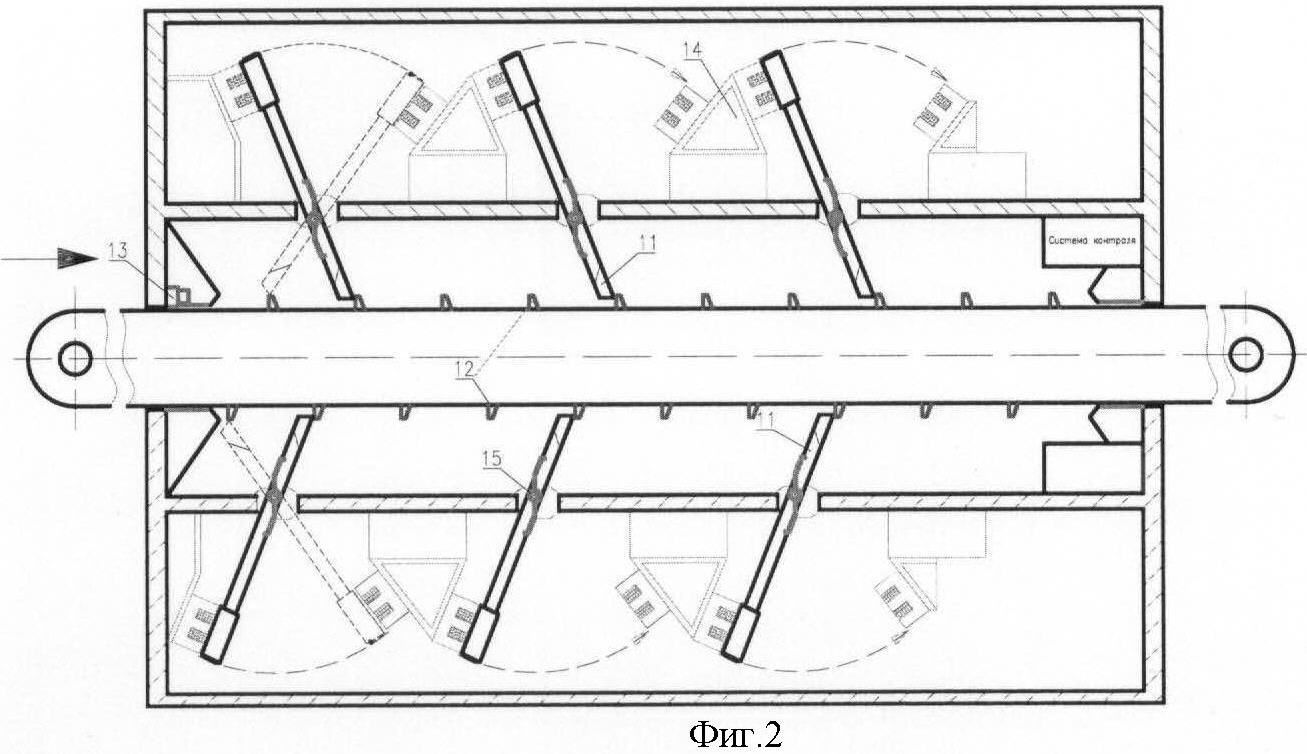
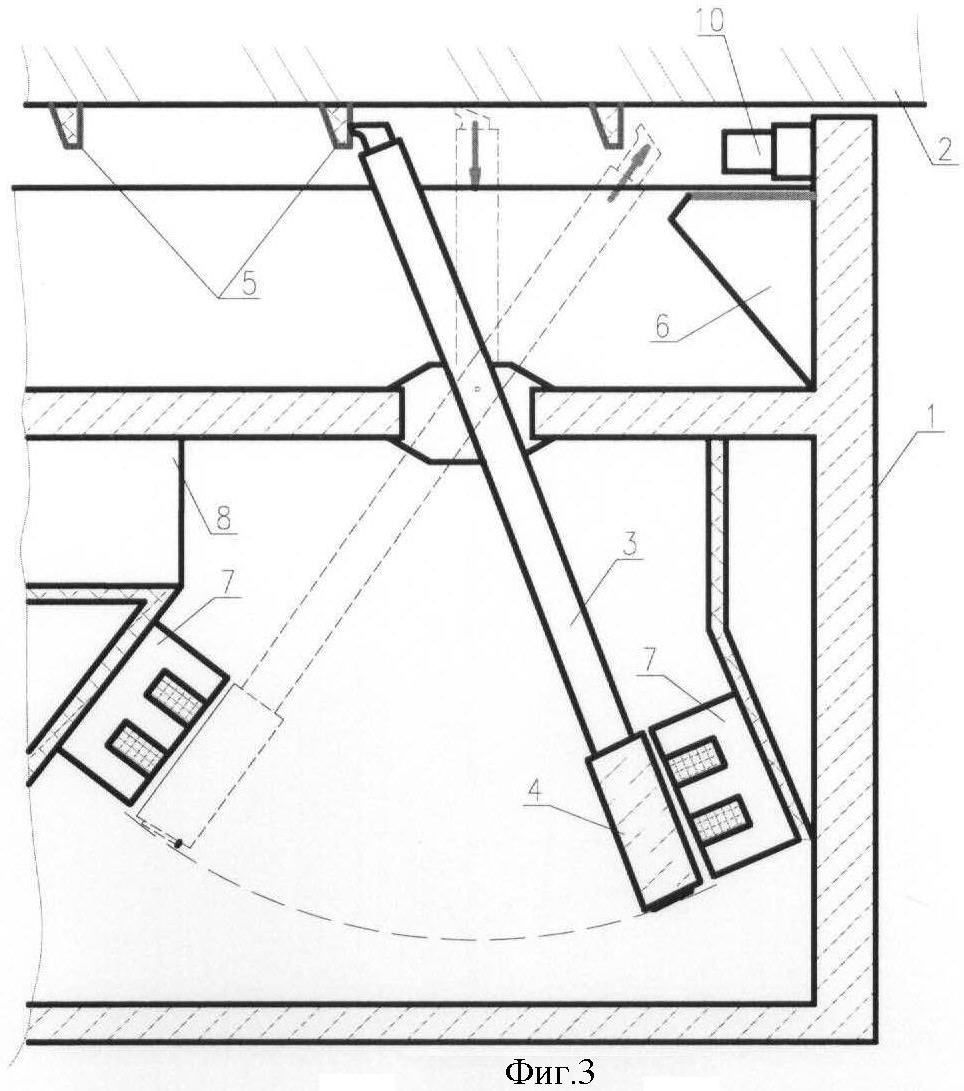
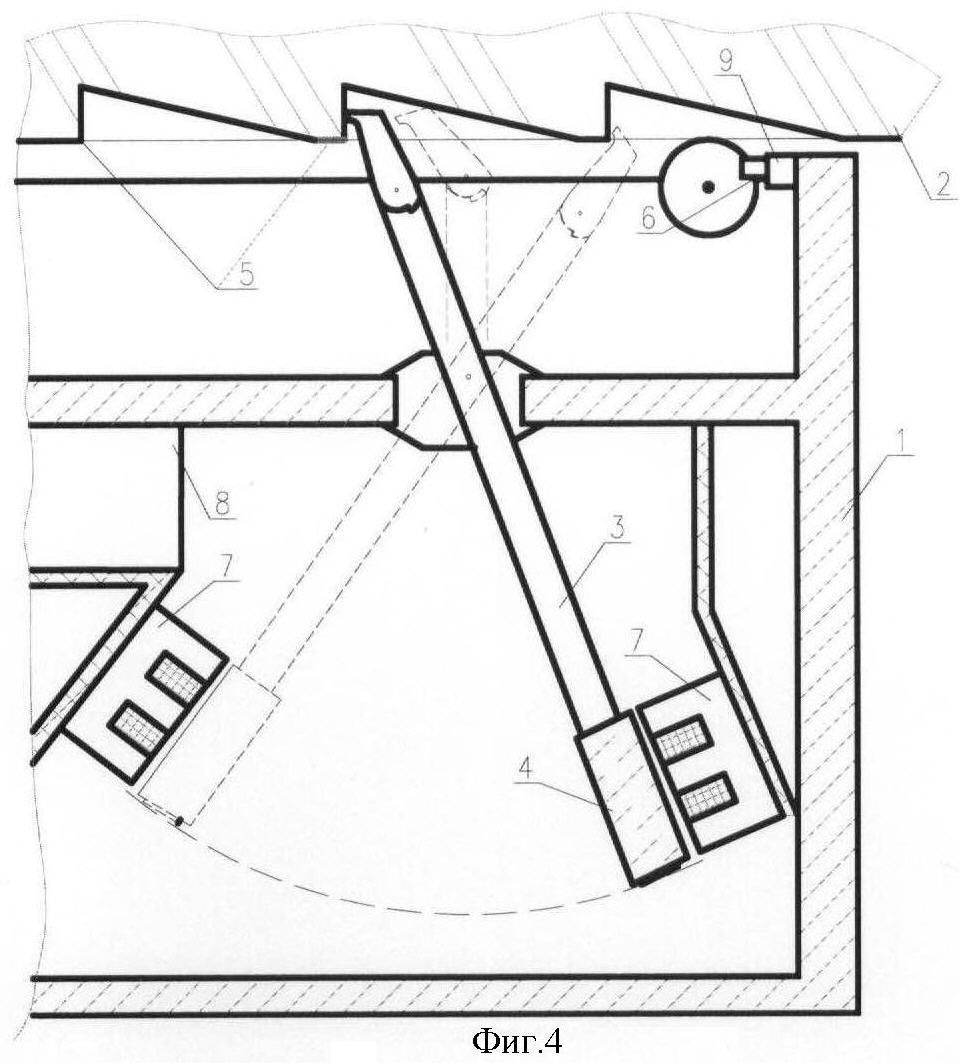
Сущность изобретения поясняется чертежами. На фиг.1 изображен продольно-вертикальный разрез двигателя. На фиг.2 изображен продольно-горизонтальный разрез двигателя. На фиг.3 изображен разрез узла рычага линейного шагового двигателя. На фиг.4 изображен разрез узла рычага линейного шагового двигателя.
Линейный шаговый двигатель по первому варианту. На фиг.1 - продольно-вертикальный разрез, на котором показан корпус 1 линейного шагового двигателя, шток 2, первая группа рычагов 3 с расположенными на них магнитными сердечниками 4, первая группа зацепов 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10. На фиг.2 - продольно-горизонтальный разрез, на котором показано расположение второй группы рычагов 11, второй группы зацепов 12, концевого датчика 13, корпуса 14 для крепления электромагнита, возвратной пружины 15.
Линейный шаговый двигатель по второму варианту. На фиг.3 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с втягивающимся сердечником, расположенная на корпусе, магнитные сердечники 4 расположенные на рычаге, зацепы 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по третьему варианту. На фиг.4 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с шарнирным механизмом, магнитные сердечники 4, расположенные на рычаге, зацепы 5 в форме приямков, ролики 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по первому варианту работает следующим образом: с помощью системы управления электромагнитами 8 на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на подвижной части, выполненной в виде штока 2, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение под действием возвратной пружины 15. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчик 13, расположенный с торца внутренней части корпуса линейного шагового двигателя, который через систему контроля 9 производит фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подает команду на электромагниты 7 для реверса. Датчики 10, 13 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по второму варианту работает следующим образом: с помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на корпусе 1, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов первая пара рычагов 3 возвращается в исходное положение под действием электромагнитов 7. В процессе возврата рычага 3 в исходное положение рычаг 3 упирается в подвижную часть, выполненную в виде штока 2, подвижная часть рычага под действием силы нажатия начинает втягиваться, длина рычага соответственно уменьшается. После того как рычаг проходит через следующий зацеп, его подвижная часть под действием пружины выталкивается и попадает в нишу зацепа. Рычаг 3 в исходном положении. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчики 10, расположенные с торца внутренней части корпуса 1 линейного шагового двигателя, которые через систему контроля 9 производят фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по третьему варианту работает следующим образом: подвижная часть, выполненная в виде штока 2, имеет жесткое крепление с корпусом устройства, в котором применяется, корпус 1 закреплен на подвижном механизме этого устройства. С помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, вследствие чего корпус 1 совершает прямолинейное движение. После смещения корпуса 1 первой группой рычагов 3 в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает корпус 1 в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение. Подвижная часть, выполненная в виде штока 2, в процессе движения катится по роликам 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными в той же плоскости, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение корпуса 1 в противоположном направлении, возвращаются в исходное положение. Корпус 1 при достижении крайнего положения хода задействует датчики 9, расположенные по краям корпуса линейного шагового двигателя, которые через систему контроля производят фиксацию линейного шагового двигателя в данном положении либо через систему управления электромагнитами 8 линейного шагового двигателя, подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Итак, заявляемое изобретение позволяет расширить функциональные и технологические возможности линейного шагового двигателя, в качестве элемента осуществляющего прямолинейное возвратно-поступательное передвижение подвижной части, благодаря применению рычагов, приводимых в движение электромагнитами, которые цепляют поочередно зацепы, расположенные на подвижной части, передвигая ее в заданном направлении.
edrid.ru
Использование: как исполнительный двигатель промышленного робота. Технический результат заключается в расширении функциональных возможностей. Линейный шаговый двигатель содержит сердечник цилиндрического тягового электромагнита с обмоткой управления, жестко соединенной с электромагнитным фиксатором. Якорь представляет собой ряд магнитопроводов в виде концентрично расположенных первого, второго и третьего цилиндров, входящих один в другой. Первая, вторая и третья конусные пружины обеспечивают выдвинутое положение якоря. Электромагнитная муфта состоит из двух подвижных друг относительно друга на первой и второй направляющих первого и второго электромагнитов. Он содержит первую и вторую обмотки, подпружиненные первой и второй пружинами. Это обеспечивает разомкнутое положение электромагнитной муфты при отключенном питании первой и второй обмоток. 2 ил.
Устройство относится к области электромеханических приводов возвратно-поступательного движения и может быть использовано как исполнительный двигатель промышленного робота.
Известен линейный шаговый двигатель, состоящий из ферромагнитной направляющей, закрепленной каретки и свободной каретки, на которых установлено по фиксирующему электромагниту на пружинящих элементах. Кроме того, на каретках закреплены тяговые электромагниты. Якорь установлен с возможностью перемещения вдоль оси направляющей для выставки необходимой величины шага двигателя [авторское свидетельство СССР N 989698, М.Кл. H 02 К 41/03, 1983]. Недостатком устройства являются невысокая средняя скорость движения двигателя и отсутствие плавной регулировки величины шага. Известен линейный шаговый электродвигатель, содержащий ферромагнитную направляющую, проходящую внутри цилиндрического немагнитного корпуса, заполненного ферромагнитной жидкостью, внутрь которого помещены соединенные между собой два подвижных электромагнита, содержащих магнитопроводы и катушки, жестко связанные замкнутым немагнитным корпусом, внутрь которого помещен первый электромагнитный фиксатор, а второй жестко закреплен к корпусу снаружи [авторское свидетельство СССР N 1188832, М.Кл. H 02 К 41/03, 1985]. Недостатком устройства является невозможность обеспечения непрерывного движения исполнительного органа электродвигателя. Известен также линейный шаговый двигатель, содержащий безобмоточный индуктор из магнито-мягкого материала с системой зубцов и подвижный якорь, включающий координатные модули, соединенные с упругим шарниром, создающим их жесткую связь в плоскостях, параллельных поверхности индуктора и возможность взаимного поворота модулей в поверхности индуктора [авторское свидетельство СССР N 1669061, М.Кл. H 02 К 41/03, 1991]. Недостатком изобретения является невысокая точность позиционирования. Наиболее близким по технической сущности и достигаемому результату к заявленному является устройство, содержащее ферромагнитную направляющую, сердечник цилиндрического тягового электромагнита с обмоткой управления, жестко соединенной с электромагнитным фиксатором, якорь, представляющий собой ряд магнитопроводов в виде концентрично расположенных цилиндров, входящих один в другой, и конусных пружин, обеспечивающих выдвинутое положение якоря [авторское свидетельство N 1192060, М.Кл. H 02 К 41/03, 1985]. Недостатком известного устройства является отсутствие возможности углового перемещения исполнительного органа электродвигателя. Задача изобретения - расширение функциональных возможностей за счет дополнения линейного шагового двигателя электромагнитной муфтой. Поставленная задача достигается тем, что линейный шаговый двигатель, содержащий ферромагнитную направляющую, сердечник цилиндрического тягового электромагнита с обмоткой управления, жестко соединенной с электромагнитным фиксатором, якорь, представляющий собой ряд магнитопроводов в виде концентрично расположенных первого, второго и третьего цилиндров, входящих один в другой, первой, второй и третьей конусных пружин, обеспечивающих выдвинутое положение якоря, в отличие от прототипа снабжается электромагнитной муфтой, состоящей из двух подвижных друг относительно друга на первой и второй направляющих первого и второго электромагнитов, содержащих первую и вторую обмотки соответственно и подпружиненных первой и второй пружинами, что обеспечивает разомкнутое положение электромагнитной муфты при отключенных напряжениях первой и второй обмоток. При этом ферромагнитная направляющая и внутренняя поверхность электромагнитной муфты имеют резьбу. Существо устройства поясняется чертежами. На фиг. 1 представлен линейный шаговый электродвигатель, разрез; на фиг. 2 - электромагнитная муфта, разрез. Электродвигатель содержит ферромагнитную направляющую 1, сердечник 2 цилиндрического тягового электромагнита с обмоткой управления 3, жестко соединенной с электромагнитным фиксатором 4, якорь, представляющий собой ряд магнитопроводов в виде концентрично расположенных первого цилиндра 5, второго цилиндра 6 и третьего цилиндра 7, входящих один в другой, первой конусной пружины 8, второй конусной пружины 9 и третьей конусной пружины 10, обеспечивающих выдвинутое положение якоря. Первая пружина 8 опирается одним концом на первую шайбу 11, а другим - на вторую шайбу 12, жестко закрепленную к первому цилиндру 5. Вторая пружина 9 опирается одним концом на вторую шайбу 12, а другим - на третью шайбу 13, жестко закрепленную ко второму цилиндру 6. Третья пружина 10 опирается одним концом на третью шайбу 13, а другим - на торец третьего цилиндра 7, жестко соединенного с электромагнитным фиксатором 14, электромагнитную муфту 15, представляющую собой два подвижных друг относительно друга первого электромагнита 16 и второго электромагнита 17, содержащие первую обмотку 18 и вторую обмотку 19 соответственно, на первой направляющей 20 и второй направляющей 21. При этом первый подвижный электромагнит 16 и второй подвижный электромагнит 17 подпружинены первой пружиной 22 и второй пружиной 23, что обеспечивает раздвинутое положение первых друг относительно друга при отключенных напряжениях первой обмотки 18 и второй обмотки 19. Ферромагнитная направляющая 1 и внутренняя поверхность электромагнитной муфты 15 имеют резьбу 24. Электродвигатель работает следующим образом. При обесточенной обмотке 3 якорь занимает исходное положение, показанное на фиг. 1. Для обеспечения перемещения двигателя по ферромагнитной направляющей 1 включается электромагнитный фиксатор 4, при этом сердечник 2 фиксируется относительно ферромагнитной направляющей 1. Затем подается напряжение на обмотку 3 тягового электромагнита. Первый цилиндр 5 втягивается во внутрь сердечника, преодолевая сопротивление первой конусной пружины 8, упирающейся одним концом в неподвижную первую шайбу 11, а другим - во вторую шайбу 12, перемещающуюся вместе с первым цилиндром 5. Первый цилиндр 5, втягиваясь в сердечник 2, одновременно перемещает второй цилиндр 6, третий цилиндр 7 и электромагнитный фиксатор 14. При полном втягивании первого цилиндра 5 в сердечник 2 второй цилиндр 6 занимает положение, когда его нижний срез совпадает с верхним срезом сердечника 2, и начинается аналогичное втягивание второго цилиндра 6, а затем - третьего цилиндра 7. Последний, втягиваясь в сердечник 2, одновременно перемещает вниз электромагнитный фиксатор 14, при этом третий цилиндр 7 фиксируется относительно ферромагнитной направляющей 1. Затем отключается электромагнитный фиксатор 4 и сердечник 2 под действием первой пружины 8, второй пружины 9 и третьей пружины 10 двигается по ферромагнитной направляющей 1, занимая исходное положение. После этого указанный цикл может многократно повторяться. При необходимости придать рабочему органу двигателя винтовое движение подают напряжения на первую обмотку 18 и вторую обмотку 19 электромагнитной муфты 15 таким образом, чтобы магнитные потоки, создаваемые ими были направлены согласно. При этом первый подвижный электромагнит 16 и второй подвижный электромагнит 17, преодолевая сопротивления первой пружины 22 и второй пружины 23, притянутся друг к другу по первой направляющей 20 и второй направляющей 21, в результате чего рабочий орган двигателя будет совершать винтовое движение по ферромагнитной направляющей 1, соединенной с электромагнитной муфтой 15 посредством резьбы 24. При отключении напряжений с первой обмотки 18 и второй обмотки 19 первый подвижный электромагнит 16 и второй подвижный электромагнит 17 примут раздвинутое положение под действием первой пружины 22 и второй пружины 23, при этом рабочий орган двигателя будет совершать линейное перемещение. Итак, предлагаемое устройство обладает возможностью углового перемещения исполнительного органа, в результате чего расширяются его функциональные возможности.Формула изобретения
Линейный шаговый двигатель, содержащий ферромагнитную направляющую, сердечник цилиндрического тягового электромагнита с обмоткой управления, жестко соединенной с электромагнитным фиксатором, якорь, представляющий собой ряд магнитопроводов в виде концентрично расположенных первого, второго и третьего цилиндров, входящих один в другой, первой, второй и третьей конусных пружин, обеспечивающих выдвинутое положение якоря, отличающийся тем, что он снабжен электромагнитной муфтой, представляющей собой два подвижных друг относительно друга на первой и второй направляющих первого и второго электромагнита, содержащих первую и вторую обмотки соответственно и подпружиненных первой и второй пружинами, при этом, ферромагнитная направляющая и внутренняя поверхность электромагнитной муфты имеют резьбу.РИСУНКИ
Рисунок 1, Рисунок 2Похожие патенты:

Изобретение относится к электромагнитным исполнительным устройствам и может быть использовано в качестве линейного электропривода

Изобретение относится к электромагнитным исполнительным устройствам и может быть использовано в качестве линейного электропривода

Изобретение относится к синхронным электрическим двигателям

Изобретение относится к электрическим машинам, в частности, к линейным шаговым электродвигателям, которые находят широкое применение в дискретном электроприводе

Изобретение относится к электротехнике, а именно к приводам возвратно-поступательного движения

Изобретение относится к электротехнике, является электрической машиной, которая может найти применение в транспортных средствах, для транспортировки грузов и т.д

Изобретение относится к электротехнике, а именно к электротехническим устройствам, преобразующим сигналы электрического тока в механические и может быть использовано в приборостроении в качестве электродвигателя возвратно-поступательного движения, а также в качестве вибровозбудителя в строительном, горном и других видах оборудования

Изобретение относится к микромехатронике и микроробототехнике, в частности к шаговым линейным микроприводам




Изобретение относится к электротехнике, а именно к шаговым двигателям

Изобретение относится к области электротехники, а именно к линейным шаговым электродвигателям

Изобретение относится к электротехнике и может быть использовано в устройствах с поступательным дискретным движением рабочего органа, например, в роботах-манипуляторах, в системах автоматики и электроприводе подач металлорежущих станков


Изобретение относится к устройству, включающему в себя двигатель внутреннего сгорания с поршнем, который имеет возможность свободного механического перемещения в корпусе

Изобретение относится к области электромашиностроения и может быть использовано в электроприводах погружных и перекачивающих насосов, в электроприводах компрессоров, перемещения грузов, дверей, задвижек и т.д

Изобретение относится к электрическим машинам к линейным шаговым электродвигателям для дискретного электропривода

Изобретение относится к электротехнике и может быть использовано для создания машин с дискретным поступательным неограниченным движением рабочего органа

Изобретение относится к электротехнике, к линейным шаговым электродвигателям с постоянными магнитами и может быть использовано в промышленных, транспортных и приборных электромеханических системах
Линейный шаговый двигатель, электромагнитный линейный привод
www.findpatent.ru
Изобретение относится к электротехнике, к линейным шаговым двигателям (ЛШД), и может быть использовано преимущественно в устройствах ввода - вывода. Технический результат состоит в расширении функциональных и технологических возможностей ЛШД и упрощении его конструкции за счет применения рычагов в качестве приводного элемента. В ЛШД в качестве элемента, осуществляющего передвижение подвижной части, введена система приводных элементов-рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе. На внутренней части корпуса расположены подшипники скольжения. Имеются датчики для контроля положения подвижной части двигателя, связанные с системой контроля. По первому варианту соосно с рычагами расположены возвратные пружины. На подвижной части расположены зацепы. По второму варианту система управления расположена в корпусе, рычаги и системы управления выполнены на подвижной части, а зацепы соответственно на корпусе. Рычаги выполнены с втягивающимся сердечником. Отличие третьего варианта от второго состоит в том, что рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов. Движение подвижной части происходит по роликам. Корпус является подвижным, а подвижная часть закреплена на неподвижном механизме. 3 н.п. ф-лы, 4 ил. 




Изобретение относится к электромашиностроению, в частности к линейным шаговым двигателям, и может быть использовано преимущественно в устройствах ввода-вывода.
Известен линейный шаговый двигатель [RU 96111310 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены в виде двух или более пьезоблоков, расположенных в продольной плоскости друг за другом, причем первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами, а второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов, а подвижная часть расположена по оси двигателя и контактирует с разрезными подвижными элементами.
Недостатком такой конструкции является ограниченность функциональных и технологических возможностей.
Наиболее близким к предлагаемому изобретению является линейный шаговый двигатель [RU 96111526 А, кл. H02N/04, 27.09.1998], содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, фиксирующие узлы выполнены из не менее двух пьезоблоков, причем каждый пьезоблок состоит из сдвигающего пьезоэлемента и фиксирующего пьезоэлемента, разделенных относительно друг друга, корпуса и фрикционного элемента изоляторами, а расположены пьезоблоки внутри корпуса в продольной плоскости друг за другом.
Недостатком такой конструкции является небольшие усилия хода при малых габаритах.
Задачей является расширение функциональных и технологических возможностей линейного шагового двигателя, достижение больших усилий хода при малых габаритах и массе, повышение точности позиционирования и упрощение его конструкции за счет применения рычагов в качестве приводного элемента.
Поставленная задача по первому варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, при этом соосно с рычагами расположены возвратные пружины, на подвижной части, выполненной в виде штока, расположены зацепы, на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по второму варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлена на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги выполнены с втягивающимся сердечником, а на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
Поставленная задача по третьему варианту решается тем, что в линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению ведена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлены на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов, корпус выполнен с возможностью перемещения по роликам, а подвижная часть закреплена на неподвижном механизме.
Сущность изобретения поясняется чертежами. На фиг.1 изображен продольно-вертикальный разрез двигателя. На фиг.2 изображен продольно-горизонтальный разрез двигателя. На фиг.3 изображен разрез узла рычага линейного шагового двигателя. На фиг.4 изображен разрез узла рычага линейного шагового двигателя.
Линейный шаговый двигатель по первому варианту. На фиг.1 - продольно-вертикальный разрез, на котором показан корпус 1 линейного шагового двигателя, шток 2, первая группа рычагов 3 с расположенными на них магнитными сердечниками 4, первая группа зацепов 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10. На фиг.2 - продольно-горизонтальный разрез, на котором показано расположение второй группы рычагов 11, второй группы зацепов 12, концевого датчика 13, корпуса 14 для крепления электромагнита, возвратной пружины 15.
Линейный шаговый двигатель по второму варианту. На фиг.3 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с втягивающимся сердечником, расположенная на корпусе, магнитные сердечники 4 расположенные на рычаге, зацепы 5, подшипники скольжения 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по третьему варианту. На фиг.4 показан корпус 1 линейного шагового двигателя, шток 2, система рычагов 3 с шарнирным механизмом, магнитные сердечники 4, расположенные на рычаге, зацепы 5 в форме приямков, ролики 6, электромагниты 7, система управления электромагнитами 8, система контроля хода штока 9, концевой датчик 10.
Линейный шаговый двигатель по первому варианту работает следующим образом: с помощью системы управления электромагнитами 8 на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на подвижной части, выполненной в виде штока 2, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение под действием возвратной пружины 15. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчик 13, расположенный с торца внутренней части корпуса линейного шагового двигателя, который через систему контроля 9 производит фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подает команду на электромагниты 7 для реверса. Датчики 10, 13 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по второму варианту работает следующим образом: с помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг выполняет движение, передавая силу электромагнитного притяжения зацепу 5, закрепленному на корпусе 1, вследствие чего подвижная часть, выполненная в виде штока 2, совершает прямолинейное движение. После смещения подвижной части, выполненной в виде штока 2 первой группой рычагов 3, в процесс вступает вторая группа рычагов, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает подвижную часть, выполненную в виде штока 2, в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов первая пара рычагов 3 возвращается в исходное положение под действием электромагнитов 7. В процессе возврата рычага 3 в исходное положение рычаг 3 упирается в подвижную часть, выполненную в виде штока 2, подвижная часть рычага под действием силы нажатия начинает втягиваться, длина рычага соответственно уменьшается. После того как рычаг проходит через следующий зацеп, его подвижная часть под действием пружины выталкивается и попадает в нишу зацепа. Рычаг 3 в исходном положении. Подвижная часть, выполненная в виде штока 2, в процессе движения скользит по подшипникам скольжения 6, расположенным на внутренней части корпуса. Аналогичный процесс производится рычагами 3, расположенными с торцевой стороны, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги, обеспечивающие движение подвижной части, выполненной в виде штока 2, в противоположном направлении, возвращаются в исходное положение. Подвижная часть, выполненная в виде штока 2, при достижении крайнего положения хода задействует датчики 10, расположенные с торца внутренней части корпуса 1 линейного шагового двигателя, которые через систему контроля 9 производят фиксацию линейного шагового двигателя в данном положении либо через систему управления 8 линейного шагового двигателя подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Линейный шаговый двигатель по третьему варианту работает следующим образом: подвижная часть, выполненная в виде штока 2, имеет жесткое крепление с корпусом устройства, в котором применяется, корпус 1 закреплен на подвижном механизме этого устройства. С помощью системы управления электромагнитами 8, расположенной на подвижной части, выполненной в виде штока 2, на обмотку электромагнита 7 подается напряжение, создается магнитный поток, сердечник 4, расположенный на рычаге 3, притягивается, рычаг 3 выполняет движение, передавая силу электромагнитного притяжения зацепу 5, вследствие чего корпус 1 совершает прямолинейное движение. После смещения корпуса 1 первой группой рычагов 3 в процесс вступает вторая группа рычагов 3, находящаяся в исходном положении, которая подхватывает зацепы 5 и проталкивает корпус 1 в направлении, сонаправленном с направлением, приданным ему первой парой рычагов 3. При начале движения второй пары рычагов 3 первая пара возвращается в исходное положение. Подвижная часть, выполненная в виде штока 2, в процессе движения катится по роликам 6, расположенным на внутренней части корпуса 1. Аналогичный процесс производится рычагами 3, расположенными в той же плоскости, при необходимости смены направления движения подвижной части, выполненной в виде штока 2. При смене направления движения рычаги 3, обеспечивающие движение корпуса 1 в противоположном направлении, возвращаются в исходное положение. Корпус 1 при достижении крайнего положения хода задействует датчики 9, расположенные по краям корпуса линейного шагового двигателя, которые через систему контроля производят фиксацию линейного шагового двигателя в данном положении либо через систему управления электромагнитами 8 линейного шагового двигателя, подают команду на электромагниты 7 для реверса. Датчики 10 расположены по обе части линейного шагового двигателя для обеспечения контроля движения подвижной части, выполненной в виде штока 2, в обоих направлениях.
Итак, заявляемое изобретение позволяет расширить функциональные и технологические возможности линейного шагового двигателя, в качестве элемента осуществляющего прямолинейное возвратно-поступательное передвижение подвижной части, благодаря применению рычагов, приводимых в движение электромагнитами, которые цепляют поочередно зацепы, расположенные на подвижной части, передвигая ее в заданном направлении.
1. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, при этом соосно с рычагами расположены возвратные пружины, на подвижной части, выполненной в виде штока, расположены зацепы, на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
2. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлена на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги выполнены с втягивающимся сердечником, а на внутренней части корпуса расположены подшипники скольжения, с торца внутренней части корпуса расположены датчики, связанные с системой контроля.
3. Линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть, отличающийся тем, что введена система подвижных элементов - рычагов прямого и обратного хода, приводимых в движение электромагнитами, связанными с системой управления, расположенной в корпусе, рычаги и система управления установлены на подвижной части, выполненной в виде штока, а зацепы соответственно на корпусе, при этом рычаги имеют шарнирный механизм, расположены внутри корпуса в одной поперечной плоскости и выполнены в форме секторов, корпус выполнен с возможностью перемещения по роликам, а подвижная часть закреплена на неподвижном механизме.
www.freepatent.ru
Использование: электроника, радиотехника, промышленное производство. Сущность изобретения: двигатель содержит корпус, подвижную часть и между ними фиксирующие узлы. Фиксирующие узлы выполнены в виде двух или более пьезоблоков. Первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами. Второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов. Подвижная часть контактирует с разрезными фрикционными элементами. Пьезоблоки могут быть расположены в продольной или поперечной плоскости. Технический результат: упрощение конструкции и технологии изготовления, большие усилия при малых габаритах и массе, повышение точности позиционирования. 7 з.п.ф-лы, 16 ил.
Изобретение относится к электротехнике, автоматике и касается пьезоэлектрических линейных шаговых двигателей.
Известен линейный двигатель, содержащий направляющую, корпус и движитель в виде пластин, укрепленных под углом в корпусе и фрикционно взаимодействующих с направляющей (Авторское свидетельство СССР N 801149, МКИ H 01 L 41/02). Однако данный линейный двигатель имеет большие габаритные размеры и массу, осуществляет перемещение с помощью упругих пластин, при этом невозможно получение больших усилий и обеспечение точности позиционирования. Наиболее близким аналогом к заявленному изобретению является пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть с рабочим элементом (Авторское свидетельство СССР N 720576, МКИ H 01 L 41/04 - прототип). Однако этот двигатель имеет ряд недостатков: большое количество деталей, сложность конструкции, сложность изготовления фиксирующих узлов и возможность поворота подвижной части в процессе линейного перемещения. В основу настоящего изобретения была положена задача создания пьезоэлектрического линейного шагового двигателя, конструктивное выполнение которого позволило бы упростить конструкцию и технологию изготовления, получить большие усилия при малых габаритах и массе, повысить точность позиционирования. Это достигается тем, что в пьезоэлектрическом линейном шаговом двигателе, содержащем корпус с закрепленными в нем фиксирующими узлами и подвижную часть, согласно изобретению, фиксирующие узлы выполнены в виде двух или более пьезоблоков, расположенных в продольной плоскости друг за другом или в поперечной плоскости, причем первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами, а второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов, а подвижная часть расположена по оси двигателя и контактирует с разрезными фрикционными элементами. Пьезоблоки, расположенные в поперечной плоскости, могут иметь форму секторов. Желательно, чтобы корпус имел форму параллелепипеда, пьезоблоки были выполнены в виде параллелепипедов и были расположены в продольной плоскости друг за другом, а подвижная часть была выполнена в виде стержня прямоугольного поперечного сечения. Целесообразно, чтобы корпус имел форму многогранника, а пьезоблоки были расположены в поперечной плоскости. Корпус может иметь вырез, через который подвижная часть выходит за пределы корпуса. Подвижная часть может иметь не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах. Пьезоэлементы могут быть выполнены в виде пакета из пьезоэлектрических пластин, колец или их секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждой последующей пьезоэлектрической пластины, кольца или сектора направлено в противоположную сторону от предыдущей. Промежутки между пьезоблоками желательно заполнить эластичным изоляционным материалом. Далее изобретение поясняется описанием конкретных примеров его выполнения и прилагаемыми чертежами, на которых: фиг. 1 изображает пьезоэлектрический линейный шаговый двигатель (первый вариант), вид спереди; фиг. 2 - то же, продольный разрез; фиг. 3 - второй вариант исполнения двигателя, вид спереди; фиг. 4 - то же, продольный разрез; фиг. 5 - третий вариант исполнения двигателя, вид спереди; фиг. 6 - то же, продольный разрез; фиг. 7 - четвертый вариант исполнения двигателя, вид спереди; фиг. 8 - то же, продольный разрез; фиг. 9 - пятый вариант исполнения двигателя, вид спереди; фиг. 10 - то же, продольный разрез; фиг. 11 - 16 - такты работы пьезоэлектрического линейного шагового двигателя. Пьезоэлектрический линейный шаговый двигатель содержит цилиндрический корпус 1 (фиг. 1 и 2), в котором расположены в продольной плоскости друг за другом два пьезоблока 2 и 3, и подвижную часть 4 в виде цилиндрического стержня. Каждый пьезоблок жестко прикреплен к внутренней поверхности цилиндрического корпуса 1. Пьезоблоки по функциональному предназначению соответственно делятся на пьезоблок сдвигающе-фиксирующий 2 и пьезоблок фиксирующий 3. Пьезоблок сдвигающе-фиксирующий 2 состоит из соединенных между собой (например, склеенных) пьезоэлементов 7 и 8, изоляторов 5 и разрезного фрикционного элемента 6. Пьезоэлемент 7 является сдвигающим, а вектор его начальной поляризации направлен под углом к продольной оси двигателя. Пьезоэлемент 8 является фиксирующим, вектор его начальной поляризации направлен перпендикулярно продольной оси двигателя. Пьезоблок фиксирующий 3 состоит из фиксирующего пьезоэлемента 9, изоляторов 5 и разрезного фрикционного элемента 6. Каждый пьезоэлемент имеет электроды, к которым подключены провода (эти элементы на чертеже не показаны). Промежутки между пьезоблоками 2 и 3 заполнены эластичным изоляционным материалом 10. На поверхности подвижной части 4 выполнена направляющая 11, которая входит в соответствующую направляющую на фрикционных элементах 6. Наличие направляющей 11 исключает возможность поворота цилиндрического стержня. Применение разрезных фрикционных элементов 6 обеспечивает более плотное обжатие подвижной части 4 пьезоблоками 2 и 3. Возможны другие варианты исполнения пьезоэлектрического линейного шагового двигателя. Во втором варианте в отличие от первого пьезоблоки 2 (фиг. 3 и 4) и 3 расположены в одной поперечной плоскости и выполнены в виде секторов. Это значительно снижает габаритные размеры и массу двигателя. Третий вариант (фиг. 5 и 6) отличается от первого формой корпуса, подвижной части и более простой в изготовлении конструкцией пьезоблоков. Корпус 12 имеет форму параллелепипеда, а подвижная часть выполнена в виде стержня 13 прямоугольного поперечного сечения. Пьезоблоки 2 и 3 имеют исполнение, аналогичное первому варианту, и состоят из пьезоэлектрических пластин, изоляторов и фрикционных элементов. В четвертом варианте (фиг. 7 и 8) корпус выполнен в виде многогранника 14, а пьезоблоки 2 и 3 расположены в одной поперечной плоскости. В пятом варианте (фиг. 9 и 10) корпус 15 имеет вырез 16, через который подвижная часть 17 выходит за пределы корпуса. Конструктивное использование пьезоблоков аналогично третьему варианту. Двигатель работает следующим образом. При подаче на электроды пьезоэлементов положительного напряжения за счет обратного пьезоэффекта происходит сдвиг внутренней части сдвигающего пьезоэлемента 7, вектор поляризации которого направлен под углом к продольной оси двигателя, влево относительно внешней части, закрепленной на корпусе. При подаче положительного напряжения на фиксирующие пьезоэлементы 8 и 9, они зажимают подвижную часть 4, т. к. вектор их поляризации направлен перпендикулярно продольной оси двигателя. При подаче отрицательного напряжения происходит сдвиг внутренней части сдвигающего пьезоэлемента 7 вправо, а фиксирующие пьезоэлементы 8 и 9 отжимаются от подвижной части. Рабочий цикл состоит из шести тактов. Положение, соответствующее первому такту, изображено на фиг. 11. На все пьезоэлементы подано положительное напряжение. При этом сдвигающий пьезоэлемент 7 смещен влево, а фиксирующие пьезоэлементы 8 и 9 зажимают подвижную часть 4. Во втором такте (фиг. 12) на фиксирующий пьезоэлемент 9 подается отрицательное напряжение, при этом он отжимается от подвижной части 4. В третьем такте (фиг. 13) на сдвигающий пьезоэлемент 7 подается отрицательное напряжение и он, смещаясь вправо, перемещает фиксирующий пьезоэлемент 8 и подвижную часть 4 вправо на один шаг. В четвертом такте (фиг. 14) на фиксирующий пьезоэлемент 9 подается положительное напряжение и он прижимается к подвижной части 4. В пятом такте (фиг. 15) на фиксирующий пьезоэлемент 8 подается отрицательное напряжение и он отжимается от подвижной части 4. В шестом такте (фиг. 16) на сдвигающий пьезоэлемент 7 подается положительное напряжение и он сдвигается вместе с фиксирующим пьезоэлементом 8 влево. При повторении циклов происходит линейное перемещение подвижной части вправо. Для увеличения мощности двигателя могут быть установлены дополнительные пьезоблоки, которые можно расположить как в поперечной, так и в продольной плоскости. Предлагаемый пьезоэлектрический линейный шаговый двигатель имеет простую конструкцию и технологию изготовления, небольшие габаритные размеры и массу, большое усилие на подвижном элементе, а также позволяет повысить точность позиционирования.Формула изобретения
1. Пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными на нем фиксирующими узлами и подвижную часть, отличающийся тем, что фиксирующие узлы выполнены в виде двух или более пьезоблоков, расположенных в продольной плоскости друг за другом или в поперечной плоскости, причем первый пьезоблок выполнен из сдвигающего и фиксирующего пьезоэлементов, разрезного фрикционного элемента, разделенных изоляторами, а второй пьезоблок выполнен из фиксирующего пьезоэлемента, разрезного фрикционного элемента и изоляторов, а подвижная часть расположена по оси двигателя и контактирует с разрезными фрикционными элементами. 2. Пьезоэлектрический линейный шаговый двигатель по п.1, отличающийся тем, что пьезоблоки, расположенные в поперечной плоскости, имеют форму секторов. 3. Пьезоэлектрический линейный шаговый двигатель по п.1, отличающийся тем, что корпус имеет форму параллелепипеда, пьезоблоки выполнены в виде параллелепипедов и расположены в продольной плоскости друг за другом, а подвижная часть выполнена в виде стержня прямоугольного поперечного сечения. 4. Пьезоэлектрический линейный шаговый двигатель по п.3, отличающийся тем, что корпус имеет форму многогранника, а пьезоблоки расположены в поперечной плоскости. 5. Пьезоэлектрический линейный шаговый двигатель по любому из пп.1 - 4, отличающийся тем, что корпус имеет вырез, через который подвижная часть выходит за пределы корпуса. 6. Пьезоэлектрический линейный шаговый двигатель по любому из пп.1 - 3 или 5, отличающийся тем, что подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах. 7. Пьезоэлектрический линейный шаговый двигатель по любому из пп.1 - 6, отличающийся тем, что пьезоэлементы выполнены в виде пакета из пьезоэлектрических пластин, колец или их секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждой последующей пьезоэлектрической пластины, кольца или сектора направлено в противоположную сторону от предыдущей. 8. Пьезоэлектрический линейный шаговый двигатель по любому из пп.1 - 5, отличающийся тем, что промежутки между пьезоблоками заполнены эластичным изоляционным материалом.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7, Рисунок 8, Рисунок 9, Рисунок 10, Рисунок 11, Рисунок 12, Рисунок 13, Рисунок 14, Рисунок 15, Рисунок 16www.findpatent.ru










