





4. Рабочая часть механической характеристики между точками А и В показывает величину перегрузочной способности данного асинхронного двигателя.
Свойства асинхронных двигателей.
1. В момент пуска асинхронный двигатель потребляет большой ток ( в 5 – 7 раз больше Iном), что соответствует режиму короткого замыкания. А пусковой вращающий момент – небольшой, так как машина сильно размагничена. Поэтому рекомендуется запускать асинхронные двигатели без механической нагрузки на валу.
2. Асинхронные двигатели, работающие с начальной нагрузкой (тяговые, крановые, лифтовые) имеют фазный ротор, который в момент пуска (4-6 секунд) получает дополнительное питание через 3 контактных кольца.
3. Асинхронный двигатель боится однофазного пуска. Так как при питании однофазным током создается пульсирующее магнитное поле, которое не может раскрутить ротор машины, но двигатель в данном случае потребляет большие пусковые токи, которые могут привести к сгоранию изоляции статорных обмоток.
Примечание: асинхронный двигатель может работать от однофазной сети, но с предварительно раскрученным ротором. При этом величина критического вращающего момента уменьшается, следовательно, двигатель при таком питании обладает меньшей перегрузочной способностью.
4. Асинхронный двигатель боится снижения питающего напряжения. При снижении питающего напряжения на 30% (что вполне допустимо для многих питающих сетей), вращающий момент уменьшается в 2 раза и под действием механической нагрузки на валу ротор может остановиться, что может привести к сгоранию изоляции статорных обмоток из-за действия больших пусковых токов.
5. Для реверсирования асинхронного двигателя достаточно поменять местами любые две питающие фазы.
6. Одной из технических характеристик асинхронного двигателя является коэффициент cosφ,характеризующий дополнительные потери энергии в цепях переменного тока и, вследствие этого, уменьшение КПД (для машин переменного тока мощность Р=U*I*cosφ, cosφ примерно =0.7).
7. Регулировка скорости вращения требует изменения частоты тока f, т.е. дополнительного электронного (тиристорного) оборудования.
Прим. Преимущества асинхронных двигателей:
poznayka.org

Категория:
Устройство и работа двигателя
Силы, действующие на детали двигателя при его работеСилы, действующие в двигателе внутреннего сгорания, можно разделить на движущие силы и силы сопротивления.
Движущие силы — это силы давления газов в цилиндре и силы инерции возвратно-поступательно движущихся частей. Сила тяжести кривошипно-шатунного механизма в двигателях с вертикальным расположением цилиндров при движении поршня вниз способствует его движению, при движении вверх — противодействует.
Силы сопротивления делят на силы полезного и вредного сопротивления. Силами полезного сопротивления являются силы сопротивления потребителя энергии двигателя; силами вредного сопротивления — силы трения поршня и поршневых колец о стенку цилиндра, силы трения в подшипниках, силы трения о воздух и т. п., на преодоление которых затрачивается дополнительная работа.
Главными силами являются силы давления газов и силы инерции в двигателе, а также силы полезного сопротивления потребителя энергии; остальными силами вследствие их относительной малости обычно пренебрегают.
Все силы, действующие в двигателе, переменные во времени.
На кривошипно-шатунный механизм действуют следующие силы.

Рис. 1. Силы, действующие в одноцилиндровом двигателе
Сила N прижимает поршень к стенке цилиндра, что вызывает износ поверхностей. Она изменяет направление и величину, поочередно прижимая поршень то к одной, то к другой стороне цилиндра. Кроме того, сила N на плече L создает момент, который стремится опрокинуть двигатель. Опрокидывающий момент воспринимается опорами двигателя.
Площадь, ограниченная диаграммой изменения касательных сил по углу поворота коленчатого вала, осью абсцисс и ординатами, проведенными через начало и конец рабочего цикла, представляет собой в масштабе работу двигателя за цикл и соответствует индикаторной работе. Работа сил инерции за цикл равна нулю.
Работа касательных сил затрачивается на преодоление сил сопротивления и изменение частоты вращения коленчатого вала. В период рабочего хода энергия подводится к системе, совершается полезная работа и увеличивается частота вращения коленчатого вала. Избыточная энергия аккумулируется всеми вращающимися массами, главным образом маховиком и потребителем энергии, и возвращается в систему, когда ее не хватает при совершении других тактов двигателя. Чем больше момент инерции маховика и число цилиндров, тем равномернее вращение вала двигателя.
На рис. 2, в показано изменение крутящего момента Мк двигателей с различным числом цилиндров (от одного до двенадцати). Неравномерность крутящего момента уменьшается с увеличением числа цилиндров, и для восьми- и двенадцатицилиндровых двигателей крутящий момент Мк мало отличается от среднего крутящего момента Мк.ср. Вследствие неравномерности крутящего момента и упругости коленчатого вала в нем возбуждаются крутильные колебания, которые могут нарушить нормальную работу двигателя и привести к поломкам коленчатого вала и других деталей.

Рис. 2. Силы и моменты, действующие в двигателе: а — индикаторная диаграмма; б — изменение относительных сил и касательной силы Т по углу а поворота коленчатого вала; в — изменение крутящего момента Мк в двигателях с различным числом цилиндров
Крутящий момент вызывает равный по величине, но противоположный по направлению реактивный момент, который передается на опоры и вызывает колебания двигателя.
Вращающиеся массы кривошипа коленчатого вала, смещенные относительно оси вращения, а также массы части шатуна, отнесенной к оси шатунной шейки коленчатого вала, создают центробежную силу. Эта сила, направленная от оси вращения по оси кривошипа, вместе с радиальной силой нагружает подшипники коленчатого вала. Центробежная сила С обычно уравновешивается центробежной силой противовесов, устанавливаемых на коленчатом валу.
В многоцилиндровом двигателе все силы, действующие на детали кривошипно-шатунного механизма одного цилиндра, создают соответствующие моменты относительно центра масс всего двигателя. Переменные силы и моменты в двигателе вызывают его колебание на опорах, вибрацию отдельных деталей и могут привести к нарушению работы и поломкам. Поэтому двигатель стремятся уравновесить, что достигается соответствующим выбором углов между кривошипами коленчатого вала, соответствующим расположением цилиндров и установкой специальных противовесов.
Читать далее: Шатун и коленчатый вал
Категория: - Устройство и работа двигателя
stroy-technics.ru
Их характеристики М=f(S) видно, что при снижении напряжения на 30% двигатель развивает максимальный момент равный Ммех.
Определяя производную от Р по скольжению и приравнивая ее к нулю

Видно, что максимум мощности двигателя (или так называемый опрокидывающий момент) достигается при критическом скольжении:
 Þ
Þ
Подставляя значение Skp в (*) получаем

Асинхронный двигатель может работать статически устойчиво при скольжении от 0 до Sкр, т.е. устойчивым является возрастающий участок.
Характеристика тормозного момента преодолеваемого двигателем, т.е. момента сопротивления и электрического момента имеет следующий вид:
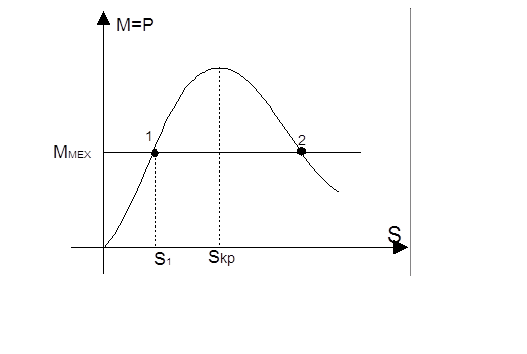 |
Установившейся режим работы двигателя возможен при двух точках пересечения характеристики момента двигателя и тормозного момента. Однако уже знакомый нам метод исследования позволяет заключить, что лишь одна из них определяет устойчивый и реально осуществимый режим- точка 1.
Предположим, что в силу каких-то условий скольжение увеличилось, в этом случае двигатель развивает момент больший чем момент сопротивления и скорость вращения двигателя увеличивается, а исходя из  и скольжение уменьшается и двигатель возвращается к исходной точке 1 . Аналогично можно показать при уменьшении скольжения.
и скольжение уменьшается и двигатель возвращается к исходной точке 1 . Аналогично можно показать при уменьшении скольжения.
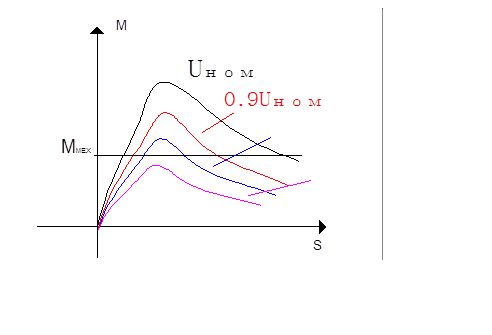 |
Рис.7
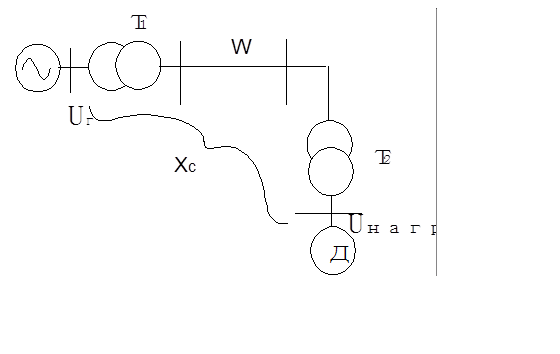 |
Рис.8
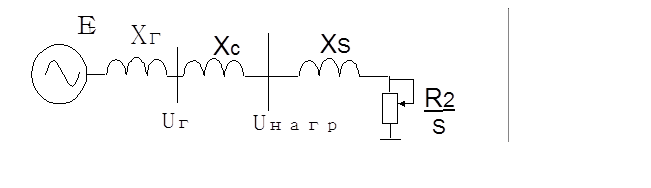 |
Рис.9
При анализе устойчивости двигателя в этом случае необходимо принимать во внимание внешнее сопротивление системы. Напряжение на выводах эквивалентного двигателя падает с увеличением скольжения в связи с потерями напряжения во внешнем индуктивном сопротивлении. Если в схеме замещения опустить сопротивление цепи намагничивания, то значение максимального вращающего момента может быть найдено:



Рис.10
Как максимальный момент, так и критическое скольжение заметно уменьшаются, хотя при построении характеристики мощности при Е=const значение ЭДС Е было выбрано таким , чтобы в исходном режиме работы системы, характеризуемой точкой 1, напряжение на выводах двигателя было нормальным. Быстрое понижение характеристики при Е=const с ростом скольжения, начиная с S1, объясняется нарастающей потерей напряжения во внешнем индуктивном сопротивлении.
Влияние индуктивного сопротивления системы вместе с пониженным уровнем напряжения в системе и могут обусловить неустойчивость асинхронных двигателей нагрузки, если даже сами двигатели обладают достаточным запасом устойчивости. Опрокидывание двигателя питающегося от генератора соизмеримой мощности может произойти при сравнительно небольших изменениях скольжения и снижениях напряжения, зависящего от режима двигателя.
 |
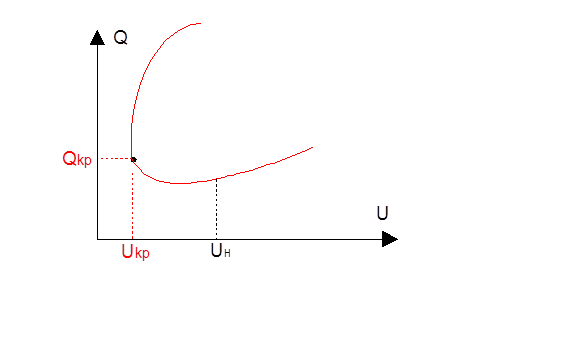 |
Рис.4

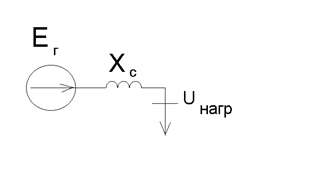
При снижении напряжения на шинах нагрузки происходит увеличение потребления реактивной мощности и следовательно увеличивается реактивного тока и увеличения падения на Хс, если мощность генератора соизмерима с мощностью нагрузки, то это увеличение падения приводит к снижению напряжения на шинах нагрузки, что в свою очередб приводит к потреблению реактивной мощности и т.д. Этот процесс происходит лавинообразно и получил название лавина напряжения и при Uкр происходит опрокидывание двигателя.
vunivere.ru
опрокидывание (двигателя) —[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]
Русско-английский словарь нормативно-технической терминологии. academic.ru. 2015.
опрокидывание (двигателя) — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999] Тематики электротехника, основные понятия EN stalling … Справочник технического переводчика
Снегоход — Стиль этой статьи неэнциклопедичен или нарушает нормы русского языка. Статью следует исправить согласно стилистическим правилам Википедии … Википедия
Hyundai Sonata — Эта статья о среднеразмерном автомобиле компании Hyundai. Об остальных значениях слова см. Sonata (значения). Hyundai Sonata Общие данные … Википедия
Судно — У этого термина существуют и другие значения, см. Судно (значения). Судно … Википедия
Chevrolet Tahoe — … Википедия
К-700 — К 700 … Википедия
К-700 (трактор) — К 700 Проект, г … Википедия
TGV — отправляется от станции Лион Перраш … Википедия
Mini-Z — 3 «суперкара» серии Racing: Lamborghini Murcielago (зелёная и чёрная) и Lamborghini Diablo в сравнении с передатчиком Mini Z это название популярной серии радиоуправляемых моделей автомобилей в масштабах от 1:24 до 1:30, выпускаемой… … Википедия
Скрепер — Военный скрепер армии США … Википедия
Buick Enclave — Buick Enclave … Википедия
normative_ru_en.academic.ru
9
УСТОЙЧИВОСТЬ ЭЛЕКТРИЧЕСКИХ СИСТЕМ.
Деление режимов электрической цепи на установившиеся и переходные процессы условно. В установившемся режиме реальной системы её параметры постоянно меняются, что связано со следующими факторами Л.5, с.169:
изменение нагрузки и реакцией на эти изменения регулирующих устройств;
нормальными эксплуатационными изменениями схемы коммутации системы;
включением и отключением отдельных генераторов или изменением их мощности.
Таким образом., в установившихся режимах в системе всегда возможны малые возмущения параметров её режима, при которых система должна оставаться устойчивой.
Статическая устойчивость – это способность системы восстанавливать исходный (или близкий к исходному) режим после малого его возмущения.
Динамическая устойчивость – это способность системы возвращаться в исходное (или близкое к нему) состояние после большого возмущения (аварийные режимы в электрической системе – КЗ, аварийные отключения или включения нагруженных агрегатов или линий, генераторов, транс-ров и т.п.), при этом возникают резкие изменения режима.
Исходя из определения статической устойчивости системы следует, что существует такой режим, при котором очень малое возмущение вызывает нарушение его устойчивости. Такой режим называется предельным, а нагрузки системы – максимальными или предельными нагрузками по условиям статической устойчивости.
Считается, что качество переходного процесса хорошее, если наблюдается быстрое его затухание и монотонность. Наибольшая величина отклонения параметра, при которой система ещё сохраняет устойчивость, определяет запас устойчивости, выражаемый коэффициентом запаса. Например, запас по напряжению и по мощности вычисляются по формулам:
 ,
,  .
.
Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, должен быть не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном Л.5, с. 177.
Задачи анализа статической устойчивости.
1. Расчёт параметров предельных режимов (предельной передаваемой мощности по линиям, критического напряжения узловых точек системы, питающих нагрузку, и т.д.).
2. Определение значений коэффициентов запаса. Вместе с коэффициентами запаса по напряжению и мощности могут вычисляться коэффициенты запаса по настроечным параметрам АРВ:
 ,
,
где Кmax и Кmin – максимальное и минимальное значения настроечных параметров, соответствующих границе области статической устойчивости.
3. Выбор мероприятий по повышению статической устойчивости энергосистем или обеспечению заданной пропускной способности передачи.
4. Разработка требований, направленных на улучшение устойчивости систем. Выбирается настройка АРВ, обеспечивающая требуемую точность поддержания напряжения.
Задачи анализа динамической устойчивости.
Эти задачи связаны с переходом системы от одного установившегося режима к другому.
Результатами расчёта динамической устойчивости являются:
1. Предельное время отключения расчётного вида КЗ в наиболее опасных точках системы.
2. Паузы систем АПВ, установленных на различных элементах электрич. системы.
3. Параметры систем автоматического ввода резерва (АВР).
Часть электроэнергетической системы, непосредственно осуществляющая снабжение электрической энергией потребителей, называется системой электроснабжения. Система электроснабжения содержит питающие и распределительные сети, трансформаторы, компенсирующие устройства (конденсаторы, синхронные компенсаторы) и устройства, в которых электрическая энергия используется в производственных и бытовых целях (приёмники электрической энергии, нагрузки, потребители). Места подключения отдельных систем электроснабжения к высоковольтным сетям электрических систем называют узлами нагрузок (шины, к которым подключена группа сосредоточенных приёмников и компенсирующих устройств - АД и СД, нагревательные приборы и т. д.).
В системах электроснабжения при их нормальной работе и во время различных пусков и остановок оборудования происходят нормальные переходные процессы. Отключения отдельных элементов, КЗ в них приводят к аварийным переходным процессам.
В нормальных режимах, при малых возмущениях необходима проверка статической устойчивости синхронных двигателей (СД), синхронных компенсаторов (СК) и больших групп асинхронных двигателей (АД). Имея мощность, соизмеримую с мощностью питающих их генераторов эти потребители могут оказаться неустойчивыми, причём эта неустойчивость проявляется в виде специфического явления, называемого лавиной напряжения.
Пуски двигателей, резкие колебания момента на их валу и т.д., приводят к изменениям величины и фазы напряжения в узлах нагрузки. Эти отклонения не должны выходить за допустимые пределы. Влияние резких изменений режима двигателей обычно заметно проявляется в распределительных сетях в виде колебаний напряжения.
Нарушения режима (КЗ в элементах питательных сетей, отключения и повторные включения СД, сомозапуск АД после перерывов питания) могут весьма существенно сказываться на режиме всей системы электроснабжения. Поэтому переходные процессы в её элементах рассматриваются не только с точки зрения обеспечения их надёжности и устойчивости, но и с точки зрения обеспечения надёжности всей системы электроснабжения.
Таким образом, изучение вопросов, относящихся к переходным процессам в системах электроснабжения, выполняется в два этапа: в начале рассматриваются методы расчётов коротких замыканий, а затем рассматриваются вопросы устойчивости, физика электромеханических процессов и основы расчёта этих процессов.
Если принять напряжение U на шинах (напряжение узла нагрузки) не зависящим от режима работы электроприёмников, то проверка статической и динамической устойчивости производится независимо для каждого электроприёмника с учётом основных критериев статической устойчивости.
Практический критерий устойчивости: устойчивыми будут те режимы, в которых при возмущении факторы, стремящиеся нарушить режим, изменяются менее интенсивно, чем факторы, противодействующие этому нарушению.
Характеристики асинхронной нагрузки (АД).
Активная мощность АД и электромагнитный вращающий момент АД:
 ;
;  ;
; .Здесь:
.Здесь: ,
, .
.
В нормальных условиях двигатель работает на устойчивой части своей механической характеристики (область, лежащая между синхронной скоростью и критическим скольжением). При снижении напряжения или увеличении механического момента двигатель может оказаться в критическом режиме. При данной механической нагрузке Рмех у каждого двигателя есть определённый критический режим. Напряжение Uкр и скольжение sкр , при которых этот режим наступает, называется критическим. При U < Uкр и увеличении механического момента рабочей машины двигатель окажется в критическом режиме – двигатель начнёт тормозиться, ток и реактивная мощность резко возрастут, а затем АД остановится – “опрокинется”.
Обычно АД работают со значительным запасом устойчивости (запас устойчивости – отношение  ). Рабочее скольжение значительно меньше критического, максимальный вращающий момент много больше рабочего. В этих условиях колебания напряжения не опасны с точки зрения устойчивости двигателей, и только очень большие снижения напряжения на их шинах (порядка 20 – 40%) приводят к опрокидыванию.
). Рабочее скольжение значительно меньше критического, максимальный вращающий момент много больше рабочего. В этих условиях колебания напряжения не опасны с точки зрения устойчивости двигателей, и только очень большие снижения напряжения на их шинах (порядка 20 – 40%) приводят к опрокидыванию.
Характеристики синхронной нагрузки (CД).
При изменении напряжения, подведённого к двигателю, его мощность и вращающий момент изменяются (без учёта потерь в статоре) пропорционально величине напряжения:
 ;
;  .
.
Величина момента, если не учитывать насыщение, пропорциональна току ротора. Синхронный двигатель обычно работает при угле = 25 30 и обладает значительной перегрузочной способностью Кп = Mmax/Mном = 2 2,5 (у специальных машин Кп = 3 4).
Для СГ запас статической устойчивости определится:

Запас устойчивости электропередачи, связывающей станцию с шинами энергосистемы, д. б. не менее 20% в нормальном режиме и 8% в кратковременном послеаварийном.
СД как и АД имеют большие запасы устойчивости и поэтому обеспечение статической устойчивости отдельных двигателей, входящих в нагрузку, не вызывает затруднений. Если запас устойчивости характеризовать отношением максимального вращающего момента к рабочему, то коэффициент запаса составит для АД и СД соответственно 1,5 –1,7 или 2 –2,5.
Таким образом, небольшие снижения напряжения на шинах двигателей не могут привести к нарушению их устойчивости. Однако всё сказанное относится к единичному двигателю или группе двигателей, питаемых от шин напряжения, величина которого не зависит от режима двигателя.
Если двигатель (или группа двигателей) питается от генератора соизмеримой с ним мощности, то напряжение на шинах двигателя зависит от режима двигателя. Условия нарушения устойчивости (опрокидывания) двигателя получаются в этом случае существенно иными. В этом случае качественные изменения условий устойчивости обусловлены изменением количества двигателей, подключенных к узлу нагрузки.
Критическое скольжение двигателя оказывается много меньше, чем в случае подключенного к шинам неизменного напряжения (U = Сonst). Запас устойчивости двигателя с учётом внешнего сопротивления значительно снижается. При больших внешних сопротивлениях возможны такие режимы, когда небольшое понижение напряжения на шинах (в допустимых пределах) может привести к нарушению статической устойчивости двигателя.
Условия работы двигателей в системе будут существенно иные, чем те, что были бы при питании от шин неизменного напряжения (U=Const).
Опрокидывание двигателя (или группы двигателей), питающихся от генератора соизмеримой мощности, может произойти при сравнительно небольших изменениях скольжения и небольших снижениях ЭДС, питающих эквивалентный двигатель, и тем более при небольших изменениях напряжения U (зависящего от режима двигателя).
Определение критических условий в этом случае следует проводить, исходя не из напряжения на зажимах двигателя, которое не является независимой переменной, а исходя из ЭДС генератора E, которую можно считать не зависящей от изменения режима.
Для двигателей, вблизи режима опрокидывания, процесс прогрессирующего снижения напряжения оказывается очень заметным. Персонал станции и системы не может судить непосредственно о росте токов роторов, статоров и скольжений двигателей, входящих в состав комплексной нагрузки в то время, когда они приближаются к опрокидыванию, но наблюдает резкое, лавинообразное снижение напряжения. Процесс этот получил название лавины напряжения. Появлению лавины напряжения обычно предшествуют режимы при недостаточно высоком возбуждении генераторов или при увеличении реактивных сопротивлений связи. Получающееся при этом снижение реактивной мощности, приходящей к потребителю, заставляет персонал систем считать причиной лавины напряжения так называемый “дефицит реактивной мощности” (генерируемая реактивная мощность в системе меньше той, которая соответствует желаемому уровню напряжения).
Обычно двигатели, подключенные к шинам напряжения, независящего от их режима, работают с весьма большим запасом устойчивости. Их рабочее скольжение значительно меньше критического, а максимальный вращающий момент много больше рабочего (1,5 1,7 Мн). Небольшие отклонения напряжения на шинах единичного двигателя не опасны с точки зрения устойчивости двигателя и только очень большие снижения напряжения на их шинах (порядка 20-30%) приводят к опрокидыванию. При питании группы двигателей от источника соизмеримой мощности в результате лавины напряжения может произойти опрокидывание и при малых (2-3%) отклонениях напряжения.
Компенсация реактивной мощности нагрузки батареями статических конденсаторов может иногда приводить к существенному снижению запасов устойчивости асинхронных двигателей, а при высокой степени компенсации – даже к “лавине напряжения”.
Длительные медленные снижения напряжения в распределительных и питающих сетях приводят к ряду явлений, с которыми приходится считаться при анализе переходных процессов в системах электроснабжения. Так понижение напряжения от U0 до U1 ведёт к снижению запаса статической устойчивости двигателей Л.3, с.199:
Коэффициент запаса по активной мощности определяется как
 .
.
Коэффициент запаса по напряжению в узле нагрузки определяется по формуле:
 ,
,
где U – напряжение узла нагрузки в исходном режиме; Uкр – критическое напряжение узла, значение которого принимается не менее 0,7 Uном и 0,75 Uнорм (Uнорм – напряжение в узле в нормальном режиме).
studfiles.net
Cтраница 1
Явление опрокидывания было впервые обнаружено выдающимся советским ученым проф. [1]
Математически явление опрокидывания волн дает пример решения уравнения с частными производными, которое имеет особенности. [2]
Экспериментальные исследования явления опрокидывания проведены при движении воды и воздуха, а также при движении различных жидкостей или смесей и воздуха. Коэффициент динамической вязкости жидкостей в опытах изменялся примерно в 2000 раз, коэффициент поверхностного натяжения - в 3 раза, а диаметр труб от 30 до 309 мм. Следует отметить количественную и качественную несовместимость экспериментальных данных некоторых исследователей, возникающую вследствие различия в определении режима опрокидывания. [3]
Очевидно, что явление опрокидывания несвойственно описанной системе, ибо сердечник, на котором сидит размагничивающий виток, почти мгновенно насыщается за счет потока, замыкающегося через шунт. [5]
Этот вывод объясняет явление опрокидывания волн при набегании их на берег ( рис. 7), его наблюдал каждый, кто был на море. [6]
Образование воздушных мешков, временные явления опрокидывания тяги, небрежное отключение газоходов бездействующего котла от газоходов работающих котлов, наличие утечек и другие обстоятельства, неизбежные в эксплуатации, могут быть причиной скопления газа в топливнике и боровах зарезервированных котлов. Учитывая изложенное, необходимо перед пуском в работу бездействующих котлов до зажигания в топлив -, вике газа произвести надежную продувку их газовых трактов при полностью открытых дымовых шиберах в течение 10 - 15 мин. Дверцы топливника, поддувальные отверстия, шиберы для регулирования подачи воздуха должны быть при этом открыты полностью. Вентиляция газового тракта производится или включением дымососов, или за счет естественного продува, если котлы работают на естественной тяге. Розжиг котлов до предварительной вентиляции газоходов категорически запрещается. [7]
Такой характер изменения ф определяет возникновение явлений опрокидывания циркуляции при тепловых нагрузках, меньших, чем без его учета. [8]
В процессе нормальной работы электрических сетей описанные здесь явления опрокидывания обычно не возникают. Однако они возможны при авариях в сети или в результате неудачной коммутационной операции. Между каждой из двух разъединенных частей провода и землей имеется емкость, поэтому в цепи, несмотря на разрыв, может протекать ток. Этот ток проходит последовательно через обе емкости линии С и С и через трансформатор с магнитным насыщением, и получается цепь, изображенная на фиг. [9]
При некотором значении моментов 3JJ ( критическое значение) возникает качественное изменение деформаций полосы - так называемое явление опрокидывания. Помимо изгиба в плоскости наибольшей жесткости, полоса дополнительно закручивается и изгибается в плоскости наименьшей жесткости. [10]
При дальнейшем увеличении момента нагрузки характеристика на участке Ь - с приобретает достаточную отрицательную жесткость. Явление опрокидывания особенно нежелательно при резком сбросе двигателем нагрузки. [11]
Приращением величины бр 0 за счет ( 6Э7о - М94о) 2 можно пренебречь, так как величина ( бЭто - М04о), при принятых в ком-прессоростроении допусках на скрещивание осей отверстий верхней и нижней головок шатуна и осей шатунной и коренных шеек коленчатого вала, мала. Учитывая явление опрокидывания поршня в мертвых точках ( подробнее см. работу И. П. Могиль-ницкого), а также то, что прогиб коленчатого вала и изгиб шатуна наибольшие по величине при положении поршня в в. [12]
При рассмотрении теоретических и экспериментальных работ по опрокидыванию видно; что необходимо создать теорию, учитывающую изменения параметров пленки потоком газа и устанавливающую зависимость между параметрами пленки, расходом жидкости, скоростью газа и физическими свойствами жидкости и газа. В данном разделе явление опрокидывания исследуется на основе нелинейной теорий движения тонких слоев вязкой жидкости вместе с газом. Определены безразмерные величины, с помощью которых в режиме опрокидывания могут быть рассчитаны параметры пленки, критическая скорость газа по опрокидыванию и гидродинамические величины для жидкостей и газов с любыми физическими параметрами. [13]
Если производительность механизмов зависит от частоты вращения двигателя, то на зажимах таких двигателей рекомендуется поддерживать напряжение не ниже номинального. При правильном выборе мощности электродвигателей и элементов цеховой электрической сети явления опрокидывания двигателей, как правило, исключаются. [15]
Страницы: 1 2
www.ngpedia.ru
Электромагнитный момент асинхронной машины создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем. Связь между моментом и скоростью вращения ротора можно получить из уравнения механической мощности. Если в него подставить выражение для тока ротора, то с учетом того, что угловая частота вращения равна  ,получим
,получим

Все величины, входящие в это выражение константы, кроме скольжения s. Взяв производную  и приравнивая ее нулю, найдем экстремумы функции
и приравнивая ее нулю, найдем экстремумы функции  . Они наступают при критическом скольжении
. Они наступают при критическом скольжении  . К приближенному равенству для критического скольжения можно перейти с учетом того, что
. К приближенному равенству для критического скольжения можно перейти с учетом того, что  . Подставляя критическое скольжение в выражение , получим значение максимального момента
. Подставляя критическое скольжение в выражение , получим значение максимального момента
 . Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
. Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
Из выражения для  следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая
следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая  также, как это было сделано для
также, как это было сделано для  , мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
, мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
 .
.
Полагая  в выражении , получим выражение для пускового момента асинхронного двигателя
в выражении , получим выражение для пускового момента асинхронного двигателя

 Полученная зависимость представлена на рисунке. Точка
Полученная зависимость представлена на рисунке. Точка  соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка
соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка  соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от
соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от  до
до  , т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
, т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
Номинальный режим работы двигателя соответствует скольжению  . Отношение
. Отношение  называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
Если за счет внешнего вращающего момента вал двигателя раскручивается до скорости выше синхронной  , то скольжение становится отрицательным и машина переходит в генераторный режим.
, то скольжение становится отрицательным и машина переходит в генераторный режим.
При скольжениях  скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
На рисунке для наглядности критическое скольжение составляет около 0,5. Такие значения в реальных машинах нормального исполнения не бывают. Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой  .
.
Выражение не позволяет анализировать свойства характеристики в общем виде. Однако, если его разделить на , то получится удобное выражение в относительных единицах, называемое по имени автора формулой Клосса
 .
.
 В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.
В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.  . Эту характеристику легко можно получить из характеристики , если учесть, что
. Эту характеристику легко можно получить из характеристики , если учесть, что  , т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости
, т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости  , а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
, а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
Линеаризованная механическая характеристика рабочего участка примет вид

Пуск двигателя
Пуск двигателей является тяжелым режимом, сопровождающимся повышенными нагрузками на электрическую цепь машины, а также на трансмиссию и механизм приводимый во вращение. Поэтому при пуске обычно ставится задача снижения токов и вращающего момента двигателя и/или скорости их изменения. В асинхронных двигателях нормального исполнения пусковой момент лишь незначительно больше номинального и при большом моменте инерции нагрузки возникает необходимость его повышения.
 На практике используются способы прямого пуска; пуска с пониженным напряжением питания и пуска с изменением сопротивления ротора.
На практике используются способы прямого пуска; пуска с пониженным напряжением питания и пуска с изменением сопротивления ротора.
Для двигателей с короткозамкнутым ротором возможны только первые два способы пуска.
Прямой пуск или пуск непосредственным включением в сеть осуществляют замыканием выключателя (рис 1. а)). В первый момент времени ток статора в 5-7 раз превосходит номинальное значение. Поэтому такой способ применяют только для двигателей малой мощности.
Уменьшение пускового тока достигается понижением напряжения с помощью сопротивлений или реакторов (индуктивностей), включаемых последовательно в цепи обмоток статора (рис.1 б) и в)), переключением соединения обмоток звезда-треугольник (рис.1 д)) и понижением напряжения с помощью автотрансформаторов (рис.1 г)). При всех этих способах в начале пуска понижается напряжение на статоре двигателя, а затем он включается на полное напряжение. Расчет активных сопротивлений и сопротивления  реакторов, а также напряжения автотрансформаторов производится из условия ограничения тока статора до допустимого значения. Однако следует иметь в виду, что пусковой момент уменьшается пропорционально
реакторов, а также напряжения автотрансформаторов производится из условия ограничения тока статора до допустимого значения. Однако следует иметь в виду, что пусковой момент уменьшается пропорционально  , поэтому при этих способах могут возникнуть проблемы с разгоном двигателя, особенно при больших моментах инерции нагрузки. Переключение обмоток со звезды на треугольник соответствует уменьшению напряжения при пуске в
, поэтому при этих способах могут возникнуть проблемы с разгоном двигателя, особенно при больших моментах инерции нагрузки. Переключение обмоток со звезды на треугольник соответствует уменьшению напряжения при пуске в  раз, что вызывает трехкратное уменьшение пускового момента.
раз, что вызывает трехкратное уменьшение пускового момента.
Двигатели с фазным ротором позволяют регулировать процесс пуска изменением добавочных сопротивлений  , включаемых в цепь ротора (рис.2 а). Изменение добавочного сопротивления не влияет на величину максимального момента двигателя и вызывает только изменение критического скольжения. При условии
, включаемых в цепь ротора (рис.2 а). Изменение добавочного сопротивления не влияет на величину максимального момента двигателя и вызывает только изменение критического скольжения. При условии  пусковой момент будет равен максимальному. Пуск двигателя с фазным ротором производят при ступенчатом или плавном изменении добавочного сопротивления (рис.2 б)). Вначале его значение устанавливают в соответствии с условием максимума и разгон начинается из точки 1 в точку 2, где сопротивление уменьшается и момент скачком увеличивается при переходе двигателя на новую механическую характеристику, соответствующую новому значению сопротивления ротора. Разгон продолжается из точки 3 в точку 4, где снова изменяется сопротивление цепи ротора. В точке 4 оно замыкается накоротко и двигатель переходит на естественную механическую характеристику в точку 5 и разгоняется долее до рабочей точки 6. Таким образом, пуск двигателя с фазным ротором происходит с уменьшением сопротивления ротора по мере разгона.
пусковой момент будет равен максимальному. Пуск двигателя с фазным ротором производят при ступенчатом или плавном изменении добавочного сопротивления (рис.2 б)). Вначале его значение устанавливают в соответствии с условием максимума и разгон начинается из точки 1 в точку 2, где сопротивление уменьшается и момент скачком увеличивается при переходе двигателя на новую механическую характеристику, соответствующую новому значению сопротивления ротора. Разгон продолжается из точки 3 в точку 4, где снова изменяется сопротивление цепи ротора. В точке 4 оно замыкается накоротко и двигатель переходит на естественную механическую характеристику в точку 5 и разгоняется долее до рабочей точки 6. Таким образом, пуск двигателя с фазным ротором происходит с уменьшением сопротивления ротора по мере разгона.
 Этот же принцип используется в короткозамкнутых двигателях с улучшенными пусковыми свойствами. Улучшение свойств достигается использованием эффекта вытеснения тока ротора. На рисунке 3 показан паз ротора и сечение его стержня. Нижняя часть стержня сцепляется (охватывается) всеми линиями магнитного поля, а по мере перемещения вверх, число линий сцепляющихся с элементами стержня уменьшается. Соответственно уменьшается и индуктивное сопротивление вышележащих слоев стержня. Поэтому ток распределяется по сечению стержня неравномерно. Плотность его j минимальна в глубоких слоях и максимальна в верхних. Этот эффект зависит от частоты тока в стержне и проявляется тем сильнее, чем выше частота. Поэтому при пуске, когда частота тока максимальна и равна частоте сети стержень обладает высоким эквивалентным сопротивлением, а в процессе разгона ток перераспределяется по всему сечению и сопротивление уменьшается. Таким образом, в двигателях, в которых используется эффект вытеснение тока реализуется система автоматического управления сопротивлением ротора. К числу двигателей с улучшенными пусковыми свойствами относятся глубокопазные двигателя и двигатели с двойной беличьей клеткой.
Этот же принцип используется в короткозамкнутых двигателях с улучшенными пусковыми свойствами. Улучшение свойств достигается использованием эффекта вытеснения тока ротора. На рисунке 3 показан паз ротора и сечение его стержня. Нижняя часть стержня сцепляется (охватывается) всеми линиями магнитного поля, а по мере перемещения вверх, число линий сцепляющихся с элементами стержня уменьшается. Соответственно уменьшается и индуктивное сопротивление вышележащих слоев стержня. Поэтому ток распределяется по сечению стержня неравномерно. Плотность его j минимальна в глубоких слоях и максимальна в верхних. Этот эффект зависит от частоты тока в стержне и проявляется тем сильнее, чем выше частота. Поэтому при пуске, когда частота тока максимальна и равна частоте сети стержень обладает высоким эквивалентным сопротивлением, а в процессе разгона ток перераспределяется по всему сечению и сопротивление уменьшается. Таким образом, в двигателях, в которых используется эффект вытеснение тока реализуется система автоматического управления сопротивлением ротора. К числу двигателей с улучшенными пусковыми свойствами относятся глубокопазные двигателя и двигатели с двойной беличьей клеткой.
Торможение
Тормозные режимы могут возникать в двигателях при определенных условиях работы или создаваться искусственно для ускорения процесса остановки.
Торможение может быть генераторным с отдачей энергии в сеть, противовключением и динамическим.
 Генераторный режим асинхронной машины возникает когда ротор начинает вращаться со скоростью выше синхронной. При этом ЭДС статора
Генераторный режим асинхронной машины возникает когда ротор начинает вращаться со скоростью выше синхронной. При этом ЭДС статора  становится больше напряжения сети
становится больше напряжения сети  , ток меняет фазу на 180° и электромагнитный момент меняет знак на противоположный, противодействуя вращению ротора. Генераторное торможение может возникать за счет действия нагрузки на вал двигателя.
, ток меняет фазу на 180° и электромагнитный момент меняет знак на противоположный, противодействуя вращению ротора. Генераторное торможение может возникать за счет действия нагрузки на вал двигателя.
Чаще возникает задача быстрой остановки ротора. Она реализуется переключением порядка следования фаз обмотки статора. При этом магнитное поле начинает вращаться в противоположную сторону и двигатель переходит в режим реверса. Ему соответствует механическая характеристика Р (см. рисунок), представляющая собой естественную характеристику развернутую на 180° . Переключение любых двух выводов статорных обмоток приведет к скачкообразному переходу из точки a в точку b на новой характеристике, затем снижению скорости до точки d. Если в момент остановки ротора не отключить питание статора, то двигатель начнет разгоняться в противоположную сторону и придет в статическое состояние в новой рабочей точке e.
Динамическое торможение осуществляется путем подключения одной, двух или трех обмоток статора к источнику постоянного тока. В этом режиме двигатель имеет механическую характеристику, проходящую через начало координат (характеристика ДТ на рис.). Таким образом, при отключении двигателя от сети переменного тока и подключении к сети постоянного тока рабочая точка переместится вначале в точку c, а затем по характеристике ДТ в точку остановки в начале координат.
poznayka.org










