Универсальными называют коллекторные двигатели, которые могут работать как от сети постоянного, так и от сети однофазного переменного тока.
Коллекторный двигатель постоянного тока в принципе может работать от сети переменного тока, так как при переходе от положительного полупериода переменного напряжения к отрицательному направление электромагнитного момента сохраняется неизменным. Объясняется это тем, что при переходе к отрицательному полупериоду почти одновременно с изменением направления тока в обмотке якоря меняется направление тока в обмотке возбуждения, т. е. меняется полярность полюсов.

Рис. 29.16. К принципу работы универсального коллекторного двигателя
Однофазные коллекторные двигатели имеют преимущественно последовательное возбуждение. Применение параллельного возбуждения (рис. 29.14,  ) в данном случае ограничивается значительной индуктивностью параллельной обмотки возбуждения, имеющей большое число витков. Это создает значительный фазовый сдвиг между током якоря
) в данном случае ограничивается значительной индуктивностью параллельной обмотки возбуждения, имеющей большое число витков. Это создает значительный фазовый сдвиг между током якоря  и током возбуждения
и током возбуждения на угол
на угол (рис. 29.14, б). Среднее значение электромагнитного момента в этом случае определяется выражением, аналогичным выражению (25.24), но учитывающим угол сдвига между током якоря и магнитным потоком:
(рис. 29.14, б). Среднее значение электромагнитного момента в этом случае определяется выражением, аналогичным выражению (25.24), но учитывающим угол сдвига между током якоря и магнитным потоком:
 , (29.34)
, (29.34)
где  — максимальное значение магнитного потока;
— максимальное значение магнитного потока;  — угол сдвига фаз между током якоря и током возбуждения;
— угол сдвига фаз между током якоря и током возбуждения;  — уголсдвига фаз между током возбуждения и магнитным потоком, обусловленный наличием магнитных потерь в машине [
— уголсдвига фаз между током возбуждения и магнитным потоком, обусловленный наличием магнитных потерь в машине [ ,а следовательно,
,а следовательно,  ].
].
В двигателе последовательного возбуждения (рис. 29.14, в) ток якоря  и ток возбуждения
и ток возбуждения  совпадают по фазе:
совпадают по фазе:  = 0 (рис. 29.14, г). Поэтому среднее значение электромагнитного вращающего момента в двигателе последовательного возбуждения
= 0 (рис. 29.14, г). Поэтому среднее значение электромагнитного вращающего момента в двигателе последовательного возбуждения  больше, чем в двигателе параллельного возбуждения:
больше, чем в двигателе параллельного возбуждения:
 . (29.35)
. (29.35)
Электромагнитный момент двигателя последовательного возбуждения при работе от сети переменного тока имеет постоянную составляющую  (рис. 29.14, д) и переменную составляющую
(рис. 29.14, д) и переменную составляющую  , изменяющуюся с частотой, равной удвоенной частоте сети
, изменяющуюся с частотой, равной удвоенной частоте сети  (рис. 29.14, е). Результирующий момент этого двигателя является пульсирующим M~
(рис. 29.14, е). Результирующий момент этого двигателя является пульсирующим M~  (рис. 29.14,ж): M~ =
(рис. 29.14,ж): M~ = .Небольшие участки графика
.Небольшие участки графика  с отрицательным (тормозящим) моментом обусловлены фазовым сдвигом между векторамимагнитного потока
с отрицательным (тормозящим) моментом обусловлены фазовым сдвигом между векторамимагнитного потока  и током
и током (рис. 29.14,г). Пульсации момента M~ практически не нарушают работу двигателя, включенного в сеть переменного тока, так как сглаживаются за счет момента инерции вращающегося якоря.
(рис. 29.14,г). Пульсации момента M~ практически не нарушают работу двигателя, включенного в сеть переменного тока, так как сглаживаются за счет момента инерции вращающегося якоря.
По своей конструкции универсальные коллекторные двигатели отличаются от двигателей постоянного тока тем, что их станина и главные полюсы делаются шихтованными из листовой электротехнической стали. Это дает возможность сократить магнитные потери, которые при работе двигателя от сети переменного тока повышаются, так как переменный ток в обмотке возбуждения вызывает перемагничивание всей магнитной цепи, включая станину и сердечники полюсов.
Основной недостаток однофазных коллекторных двигателей — тяжелые условия коммутации. Дело в том, что в коммутирующих секциях помимо реактивной ЭДС и ЭДС внешнего поля (см. § 27.3) наводится трансформаторная ЭДС  , действующее значение которой
, действующее значение которой
 . (29.36)
. (29.36)
Эта ЭДС наводится переменным магнитным потоком возбуждения, сцепленным с коммутирующими секциями. Для уменьшения трансформаторной ЭДС необходимо уменьшить поток  , ачтобы мощность двигателя при этом осталась прежней, следует увеличить число полюсов в двигателе.
, ачтобы мощность двигателя при этом осталась прежней, следует увеличить число полюсов в двигателе.
Применение в обмотке якоря двигателя одновитковых секций  также способствует ограничению
также способствует ограничению  , но при этом увеличивается количество пластин в коллекторе, а следовательно, возрастают его размеры. Применение добавочных полюсов с обмоткой, включенной последовательно в цепь якоря, позволяет добиться полной взаимной компенсации трансформаторной ЭДС только при определенных значениях тока якоря и частоты вращения. При других режимах работы двигателя условия коммутации остаются тяжелыми. Регулировка частоты вращения и реверсирование однофазного коллекторного двигателя выполняются так же, как и в двигателях постоянного тока последовательного возбуждения.
, но при этом увеличивается количество пластин в коллекторе, а следовательно, возрастают его размеры. Применение добавочных полюсов с обмоткой, включенной последовательно в цепь якоря, позволяет добиться полной взаимной компенсации трансформаторной ЭДС только при определенных значениях тока якоря и частоты вращения. При других режимах работы двигателя условия коммутации остаются тяжелыми. Регулировка частоты вращения и реверсирование однофазного коллекторного двигателя выполняются так же, как и в двигателях постоянного тока последовательного возбуждения.
В универсальном коллекторном двигателе стремятся получить примерно одинаковые частоты вращения при номинальной нагрузке, как на постоянном, так и на переменном токе. Достигается это тем, что обмотку возбуждения двигателя выполняют с ответвлениями: при работе двигателя от сети постоянного тока обмотка возбуждения используется полностью, а при работе от сети переменного тока — частично (рис. 29.15,  ).
).
Расхождения в характеристиках двигателя на постоянном и переменном токе объясняются тем, что при работе от сети переменного тока на величину и фазу тока оказывают влияние индуктивные сопротивления обмоток якоря и возбуждения.
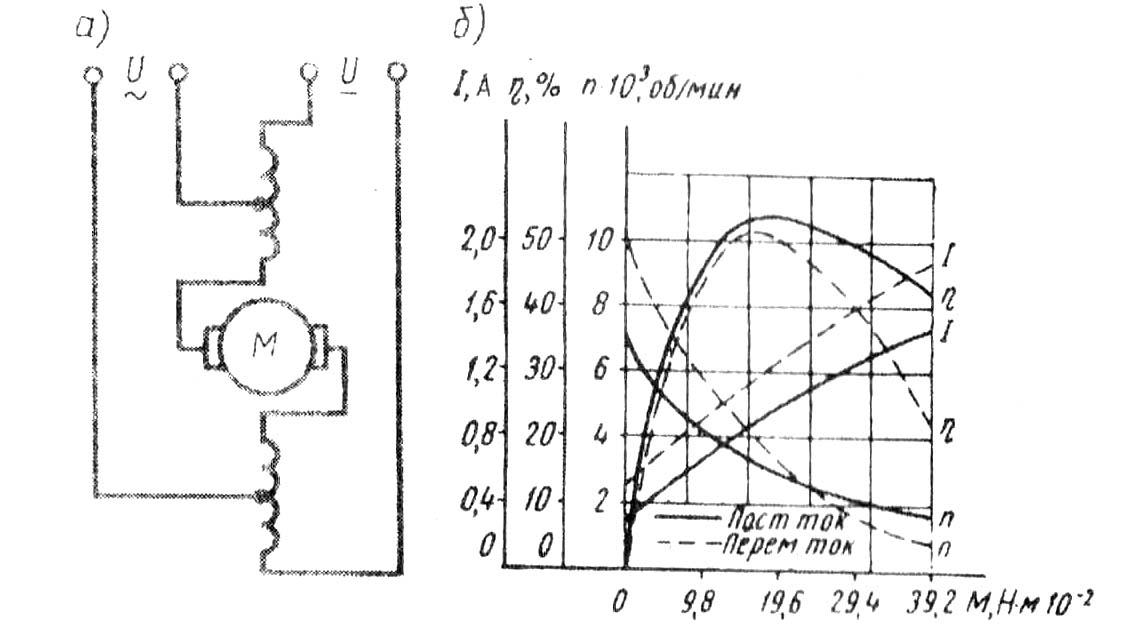
Рис. 29.17. Схема соединений и рабочие характеристики универсального коллекторного двигателя
Однако уменьшение числа витков обмотки возбуждения обеспечивает сближение характеристик лишь при нагрузке, близкой к номинальной. На рис. 29.15, б приведены рабочие характеристики универсального коллекторного двигателя типа УМТ-22 (55 Вт, 200 об/мин, 110/127 В). Потребляемый двигателем ток при работе от сети переменного тока больше, чем при работе этого же электродвигателя от сети постоянного тока, так как переменный ток помимо активной имеет еще и реактивную составляющую. Коэффициент полезного действия универсальных двигателей при переменном токе ниже, чем при постоянном, что вызвано повышенными магнитными потерями. Области применения универсальных коллекторных двигателей достаточно широки: их применяют в автоматике, для привода различного электроинструмента, бытовых электроприборов и др.
Контрольные вопросы
Какие способы ограничения пускового тока применяются в двигателях постоянного тока?
С какой целью при пуске двигателя параллельного возбуждения сопротивление реостата в цепи возбуждения устанавливают минимальным?
Сравните двигатели параллельного и последовательного возбуждения по их регулировочным свойствам.
Какова разница в конструкции коллекторных двигателей постоянного и переменного тока?
studfiles.net
Доброго времени суток, дорогие читатели! В предыдущих статьях были рассмотрены электромоторы переменного тока. В этой же статье я расскажу про движки, работающие на постоянном токе. Будет рассмотрено их устройство и, немного, история и принцип работы. Начнем.
Принцип действия двигателя постоянного тока этих машин основывается на эффекте отталкивания одноименных и притягивания разноименных полюсов магнита. Первым такое устройство придумал русский инженер Якоби. В 38-ом году 19-го столетия появилась первая модель промышленного масштаба и, с того времени, больших изменений в конструкции не было.

Если брать моторы с небольшой мощностью, то в них обязательно явным образом присутствует один из магнитов (он крепится прямо на корпус машины).
Второй появляется после подачи напряжения на обмотку якоря. С этой целью применяется устройство особого типа, именуемое коллекторно-щеточным узлом. Коллектор является кольцом, проводящим ток, которое крепится на вал мотора. К нему подключаются выводы обмоток якоря.
Для возникновения вращающего момента нужна непрерывная смена полюсов якорного магнита. Это должно выполняться в тот момент, когда якорь проходит через «магнитную нейтраль». Конструктивным образом это выполняется благодаря разделению коллекторного кольца на части (секторы) при помощи непроводящих ток пластин.
Выводы якорных обмоток цепляют к секторам поочередно. Для соединения коллектора и сети питания применяются щетки – стержни из графита с высокой электропроводимостью и маленьким коэффициентом трения по скольжению.
Моторы большой мощности не снабжаются физическими магнитами в силу того, что это сильно утяжелит их конструкцию.
В этих машинах, для создания постоянного магнитного поля, применяют металлические стержни с обмотками, подключаемые к положительной, либо отрицательной шине питания. Полюса одноименного типа подключают один за другим (последовательным образом).
Двигатель может иметь одну, либо четыре пары полюсов. Количество же щеток-токосъемников должно соответствовать числу пар полюсов. У моторов с большой мощностью предусматриваются некоторые конструктивные хитрости. Одна из них заключается в сдвигании щеточного узла на некоторый угол по отношению против вращения после старта мотора и смены нагрузки на нем.
Делается это с целью компенсации эффекта «якорной реакции», который приводит к торможению вала, в результате чего происходит уменьшение эффективности мотора.
Мы рассмотрели двигатели коллекторного типа. Однако кроме них, имеются и устройства не имеющие коллекторов. Движки подобного типа имеют ротор, на котором есть постоянные магниты и статор с обмотками. Существует два вида таких моторов: Inrunner (с магнитами внутри ротора) и Outrunner (у них магниты находятся снаружи, вращаясь вокруг статора, имеющего обмотки).
Машины первого типа, как правило, используются в моторах с высоким числом оборотов и малым числом полюсов. Второй же тип применяют, если требуется заиметь движок с большим моментом и малыми оборотами. По конструкции двигатели Inrunner наиболее просты в силу того, что их статор может, одновременно, служить корпусом, а, значит, на него можно смонтировать устройства для крепления.
У двигателей системы Outrunner вращающейся частью является наружная его часть. Движок крепится за неподвижный вал или другие части статора. Если же такой двигатель используется как мотор-колесо, то крепится он посредством неподвижной оси и заведением проводов статора через его пустотелую ось.
Число полюсов ротора всегда четно. Магниты, используемые в этих движках, обычно имеют прямоугольную форму. Иногда применяются, конечно, магниты цилиндрической формы, но это гораздо реже. Монтируются же магниты так, чтобы их полюса чередовались.
Не всегда случается совпадение количества магнитов и полюсов (может случаться так, что несколько магнитов формируют один полюс).
Размеры устанавливаемых в моторах магнитов различны и зависят они от самого движка и его характеристик. От мощности используемых магнитов зависит то, каким будет момент развиваемой на валу силы.
К ротору магниты крепятся при помощи особого клея (встречаются, конечно, варианты с магнитодержателями, но гораздо реже). Сам ротор может быть изготовлен как из магнитопроводящего материала (сталь), так и из немагнитопроводящего (сплавы алюминия, пластик и пр.), и комбинированным.
Обмотки трехфазных моторов без коллектора наматываются проводом из меди. Провод же используется и одножильный и многожильный. Статоры этих двигателей изготавливают из сложенных листов стали, являющейся магнитопроводящей.
Статор должен иметь столько зубьев, чтобы их количество делилось на количество рабочих фаз. Статор может иметь такое число зубьев, что оно как больше, так и меньше, чем полюсов у ротора.
Наиболее простой движок, имеющий три полюса статора. Однако используется подобная конструкция весьма редко (поскольку, в любой момент времени в работе лишь пара фаз, в результате чего возникает вибрация и перекос). Чтобы избавиться от этих неприятных явлений, делается много полюсов, а обмотки равномерно распределяются между ними. В таком случае не возникает разбалансировки магнитных сил.
Помимо всего прочего, такие моторы могут снабжаться, либо не снабжаться датчиками положения ротора. Датчики, в большинстве своем, работают на принципе эффекта Холла. Они реагируют на магнитные поля и располагаются по статору так, чтобы магниты ротора действовали на них (то есть под углом 120 градусов между собой). Естественно, имеется ввиду 120 электрических градусов.
Датчики могут располагаться и внутри и снаружи двигателя. Вторым способом можно оснащать движки, изначально не имеющие датчиков.
Иногда датчики ставят на специальное приспособление, дающее возможность небольшого перемещения датчиков. В то же время, если необходим реверс такого мотора, то устанавливается второй комплект датчиков Холла, настраиваемых на обратное направление вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
podvi.ru
Коллекторный двигатель — это электрическая машина, соединяющая обмотку ротора с коллектором для преобразования электрической энергии в механическую. Бывают коллекторные двигатели постоянного и переменного тока. Основным достоинством коллекторных двигателей постоянного тока является возможность регулирования частоты вращения в широком диапазоне, линейность механической и, в большинстве случаев, регулировочной характеристики, большой пусковой момент, высокое быстродействие, малая масса и объем на единицу полезной мощности и более высокий КПД по сравнению с двигателями переменного тока той же мощности.
По функциональному назначению коллекторные двигатели постоянного тока подразделяются на силовые и управляемые. Силовые электродвигатели выполняются со стабилизацией и без стабилизации частоты вращения. КПД двигателей постоянного тока различной мощности лежит в пределах 10—85% и зависит от функционального назначения двигателя, режима работы, степени использования, способа возбуждения, конструктивного исполнения. Наибольший КПД имеют двигатели с полым якорем и возбуждением от постоянных магнитов, наименьший — двигатели с электромагнитным возбуждением. В коллекторном двигателе переменного тока ротор с коллектором используются в качестве механического преобразователячастоты.
От синхронного и бесколлекторного асинхронного двигателя коллекторный двигатель переменного тока плавно и экономично регулирует скорость вращения при хороших пусковых и рабочих характеристиках, но данные двигатели малонадежны из-за необходимости тщательного ухода за коллекторными щетками. Коллекторные двигатели бывают однофазные и трехфазные. Однофазные двигатели, разработанные в конце XIX в., долгое время не применялись. Сегодня их вращающийся момент получается при взаимодействии магнитных полей, которые создаются обмотками возбуждения статора и обмоткой ротора. Этот вращающийся момент всегда направлен только в одну сторону. Изменить направление можно лишь при переключении концов обмотки возбуждения.
Данная обмотка мощностью более 10—15 кВт служит для компенсации реакции ротора, а дополнительные полюсы служат для улучшения коммутации. Улучшениями коммутации занимался в 1912 г. электротехник К. И. Шенфер.
Трехфазные коллекторные двигатели переменного тока являются асинхронными электрическими машинами, которые работают со скоростью, отличающейся от скорости вращения поля. На статоре коллекторного двигателя располагается трехфазная обмотка, а на роторе — обмотка, соединенная с коллектором, имеющим трехфазную систему щеток. Данные двигатели бывают параллельного и последовательного возбуждения. При параллельном возбуждении одна обмотка ротора питается через контактные кольца от сети, а другая — вспомогательная — соединяется с коллектором, который имеет двойную трехфазную систему щеток. При этом обмотка статора состоит из трех отдельных секций — фаз. Щетки каждой фазы могут как сдвигаться, так и раздвигаться. Такие трехфазные коллекторные двигатели переменного тока иногда применяются в прядильной, резиновой и полиграфической промышленности.

enciklopediya-tehniki.ru
 Универсальные коллекторные движки — это электродвигателималой мощности поочередного возбуждения с секционированной обмоткойвозбуждения, по этому они могут работать как на неизменном, так и напеременном стандартных напряжениях приблизительно с схожими качествами ичертами. Такие электродвигатели употребляют для привода маломощныхбыстроходных устройств и многих бытовых устройств. Они допускают обычное, обширноеи плавное регулирование скорости.
Универсальные коллекторные движки — это электродвигателималой мощности поочередного возбуждения с секционированной обмоткойвозбуждения, по этому они могут работать как на неизменном, так и напеременном стандартных напряжениях приблизительно с схожими качествами ичертами. Такие электродвигатели употребляют для привода маломощныхбыстроходных устройств и многих бытовых устройств. Они допускают обычное, обширноеи плавное регулирование скорости.
По собственному устройству эти движки отличаются от движковнеизменного тока общего внедрения конструкцией статора, магнитную системукоторого собирают из топких изолированных друг от друга листовэлектротехнической стали с выступающими полюсами, на которых располагают по двесекции обмотки возбуждения. Эти секции соединяют поочередно с якорем ирасполагают по обе стороны от его выводов, что понижает радиопомехи отценообразования на коллекторе под щетками, которое при питании мотора от сетипеременного напряжения в особенности усиливается из-за существенного ухудшениякритерий коммутации.
Зависимо от конструкции мотора обмотка возбужденияможет быть соединена с якорем снутри машины либо может иметь самостоятельныевнешние зажимы, что удобнее для конфигурации направления вращения якоря методомперемены мест проводов, подходящих к его зажимам либо к зажимам обмоткивозбуждения. Якорь универсальных движков устроен так же, как и якорь машиннеизменного тока, а обмотка его присоединена к коллекторным пластинам, к которымприжаты щетки.
Запуск этих движков делают конкретным включением всеть неизменного либо переменного напряжения, которое соответствует номинальномунапряжению, обозначенному в ее табличке.
Скорость якоря универсального коллекторного моторапоочередного возбуждения прямо пропорциональна напряжению на его зажимах иназад пропорциональна амплитуде магнитного потока, зависящей от нагрузки навалу электродвигателя.
Механические свойства у таких электродвигателейотличаются зависимо от того на каком напряжении (переменном либо неизменном)работает электродвигатель, потому что при питании от сети неизменного напряжениянаходится только падение напряжения, сделанное сопротивлениями обмотоквозбуждения и якоря неизменному току, в то время как при присоединении к сетипеременного напряжения появляется еще существенное индуктивное падение напряженияна обмотках возбуждения и якоря. Не считая этого, при переменном токе при малойскорости якоря имеет место значимый сдвиг фаз меж напряжением и током, чторезко понижает момент на валу мотора.
Для получения приблизительно схожих механических чертна переменном и неизменном токе включают секционированную обмотку возбуждениямотора на неизменный ток стопроцентно, а при включении на переменный ток —отчасти, зачем движок присоединяют к соответственной сети зажимами собозначениями «+» и » — » либо зажимами с обозначениями «~».
При номинальных режимах, отвечающих питанию от сетинеизменного и переменного напряжений, номинальная скорость якоря схожа.Но при перегрузке мотора, присоединенного к сети переменного напряжения,скорость якоря миниатюризируется посильнее, а при разгрузке растет резвее, чем приработе его от сети неизменного напряжения.
При холостом ходе скорость якоря может превысить номинальнуюв 2,5 — 4 раза и выше, а это не допустимо из-за значимых центробежных сил,которые могут повредить якорь. По этой причине режим холостого хода допустимтолько для движков малой номинальной мощности с относительно большеннымимеханическими потерями, ограничивающими скорость якоря. Движки смалозначительными механическими потерями всегда должны нести нагрузку более 25%номинальной.
Регулирование скорости якоря производят конфигурациейнапряжения на зажимах машины, также шунтированием обмотки возбуждения либообмотки якоря резистором. Из этих методов полюсное регулирование,осуществляемое параллельным включением обмотки возбуждения регулируемогорезистора, является более экономным.
Главным преимуществом универсальных коллекторных движковпо сопоставлению с асинхронными и синхронными движками будет то, что ониразвивают значимый исходный пусковой момент благодаря поочереднойобмотке возбуждения и позволяют без внедрения повышающего редуктора получитьскорость якоря существенно выше синхронной.
Быстроходность универсальных коллекторных движковограничивает их размеры и массу.
Номинальный к. п. д. этих машин находится в зависимости от их номинальноймощности, быстроходности и рода тока. Так, у движков номинальной мощностью от5 до 100 Вт он составляет от 0,25 до 0,55, а в машинах номинальной мощностью до600 Вт его значение доходит до 0,70 и выше, при этом работа движков напеременном токе всегда сопровождается пониженным к. п. д., что вызванозавышенными магнитными и электронными потерями. Номинальный коэффициентмощности этих движков составляет 0,70 — 0,90.
Создатель статьи: Повный А. В.
Электрическая электротехническая библиотека
elektrica.info