Все более широкое применение находит так называемый вентильно - индукторный электропривод (ВИП), основными достоинствами которого являются простота, технологичность, невысокая стоимость применяемого индукторного электродвигателя, сочетающиеся с широкими регулировочными возможностями. Мощность таких ЭП составляет от единицы до нескольких сотен киловатт и более.
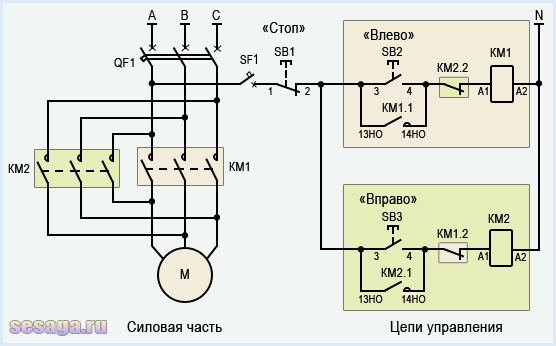
Структурная схема сило вой части ВИП в случае питания его от трехфазной сети переменного тока. В ее состав входят индукторный двигатель ИД, электронный коммутатор К. выпрямитель В, датчик положения ротора двигателя ДП и система управления СУ. Особенность ВИП состоит в применении индукторного двигателя с различным числом полюсов статора и зубцов на роторе (обычно в пределах 4... 12). К примеру возьмём: трехфазный двигатель, имеющий шесть полюсов статора и четыре зубца на роторе. На полюсах статора ИД расположены три обмотки А —а, В—Ь, С—с, подключенные к электронному коммутатору, выполняемому обычно на силовых транзисторах того или иного типа. В качестве управляемых ключей коммутатора используются силовые полярные транзисторы Т1 ... Тб с изолированным затвором типа IGBT. Управление ключами осуществляет схема управления обеспечивающая подачу на них импульсов управления с необходимой последовательностью и частотой, которые определяются сигналами задания скоростиUз.с и датчика положения Uд.п
Принцип действия ВИП состоит в следующем. При подаче импульсов управления на пару транзисторов (ключей) одной фазы коммутатор подключает обмотку этой фазы двигателя к выходу выпрямителя В. По обмотке начинает протекать ток, создающий в двигателе магнитное поле. Это магнитное поле вызывает появление электромагнитных сил притяжения между полюсами статор ближайшими к ним зубцами ротора, которые и создают вращающий момент на валу двигателя. Под действием этого момента ротор перемещается в согласованное положение, в котором оси возбужденных полюсов статора и ближайших к ним зубцов ротора будут совпадать.
Так как число полюсов статора и зубцов ротора различно, при согласованном положении ротора с работающей фазой следующая фаза оказывается в рассогласованном положении и подготовленной к очередному подключению, к источнику питания. Требуемая последовательность подключения фаз двигателя к источнику питания, при которой на его валу обеспечивает постоянное направление вращающего момента, осуществляется с помощью находящегося на валу датчика положения.
Скорость вращения ротора определяется формулой:
где  — частота коммутации обмоток;m— число фаз двигателя;n- число зубцов ротора.
— частота коммутации обмоток;m— число фаз двигателя;n- число зубцов ротора.
Формула показывает возможность выполнения ВИП с личными скоростями. При высокой частоте коммутации обмоток ИД имеют большие скорости вращения, а большое число полюсов статора и зубцов ротора определяет их низкие скорости. При низких скоростях ИД из кинематической схемы ВИП можно исключить редукторы.
Механические характеристики в разомкнутой структуре ВИП при различных напряжениях питания U. При помощи различных обратных связей могут быть сформированной характеристики, обеспечивающие регулирование координат ЭП требуемым качеством. В ВИП за счет выбора моментов включения и отключения обмоток двигателя может быть реализован и тормозной режим работы. ДиодыD1….D6 служат для обеспечения возможности циркуляции электромагнитной мощности ЭП при отключении силовых транзисторов, а конденсатор С играет роль фильтра на выходе выпрямителя.
В современных схемах ВИП широко используются микропроцессорные средства управления, позволяющие в ряде случаев отказаться от применения датчика положения, а необходимую для работы информацию о положении ротора получать косвенным путем. Это позволяет упростить кинематическую схему ВИП и сделать его более простым и надежным.
Литература:
В.В. Москаленко – «Электрический привод» 2000г.
13
studfiles.net
 Вентильно–индукторный двигатель – это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода.
Вентильно–индукторный двигатель – это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода.
 Структурная схема вентильно–индукторного двигателя
Структурная схема вентильно–индукторного двигателя
 По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, ИМ в ВИД не является самодостаточной. Она принципиально неспособна работать без преобразователя частоты и системы управления. Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии.
По своей структуре ВИД ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, ИМ в ВИД не является самодостаточной. Она принципиально неспособна работать без преобразователя частоты и системы управления. Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии.
 Особенности конструкции индукторной машины ИМ, входящая в состав ВИД, может иметь различные конструктивные исполнения. На рисунке приведено поперечное сечение 4 х–фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ первая цифра указывает число полюсов статора, вторая – ротора.
Особенности конструкции индукторной машины ИМ, входящая в состав ВИД, может иметь различные конструктивные исполнения. На рисунке приведено поперечное сечение 4 х–фазной ИМ конфигурации 8/6. При обозначении конфигурации ИМ первая цифра указывает число полюсов статора, вторая – ротора.
 Анализ показывает, что ИМ имеет следующие конструктивные особенности: – Сердечники статора и ротора имеют явнополюсную структуру. – Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора. – Сердечники статора и ротора выполняются шихтованными. – Обмотка статора – сосредоточенная катушечная. Она может быть одно- или многофазной. – Фаза ИМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора и ротора. В 4 х–фазном исполнении они имеют конфигурацию 16/12. Фаза такой ИМ состоит из двух пар катушек, которые располагаются на полюсах статора таким образом, что их оси ортогональны. – Катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно; в магнитном – согласно или встречно. – Обмотка на роторе ИМ отсутствует.
Анализ показывает, что ИМ имеет следующие конструктивные особенности: – Сердечники статора и ротора имеют явнополюсную структуру. – Число полюсов относительно невелико. При этом число полюсов статора больше числа полюсов ротора. – Сердечники статора и ротора выполняются шихтованными. – Обмотка статора – сосредоточенная катушечная. Она может быть одно- или многофазной. – Фаза ИМ, как правило, состоит из двух катушек, расположенных на диаметрально противоположных полюсах статора. Известны ИМ с удвоенным числом полюсов статора и ротора. В 4 х–фазном исполнении они имеют конфигурацию 16/12. Фаза такой ИМ состоит из двух пар катушек, которые располагаются на полюсах статора таким образом, что их оси ортогональны. – Катушки фазы могут быть соединены в электрическом отношении параллельно или последовательно; в магнитном – согласно или встречно. – Обмотка на роторе ИМ отсутствует.
 На рисунке приведены ИД различной конфигурации: Однофазная ИМ конфигурации 2/2 Трехфазная ИМ конфигурации 6/4 Двухфазная ИМ конфигурации 4/4 Четырехфазная ИМ конфигурации 8/6
На рисунке приведены ИД различной конфигурации: Однофазная ИМ конфигурации 2/2 Трехфазная ИМ конфигурации 6/4 Двухфазная ИМ конфигурации 4/4 Четырехфазная ИМ конфигурации 8/6
 Принцип действия Рассмотрим принцип действия ВИД на примере 4 х–фазного двигателя c ИМ конфигурации 8/6 К пояснению принципа действия ВИД: а) рассогласованное положение сердечников для фазы А; б) промежуточное положение сердечников для фазы А; в) согласованное положение сердечников для фазы А.
Принцип действия Рассмотрим принцип действия ВИД на примере 4 х–фазного двигателя c ИМ конфигурации 8/6 К пояснению принципа действия ВИД: а) рассогласованное положение сердечников для фазы А; б) промежуточное положение сердечников для фазы А; в) согласованное положение сердечников для фазы А.
 Рассогласованным положением сердечников статора и ротора для некоторой фазы ИМ называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей q ротора, то есть зубцы фазы располагаются строго напротив пазов ротора.
Рассогласованным положением сердечников статора и ротора для некоторой фазы ИМ называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей q ротора, то есть зубцы фазы располагаются строго напротив пазов ротора.
 В магнитном поле фазы А ротор будет стремиться ориентироваться таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное значение. При этом на сердечники статора и ротора будут действовать одинаковые по значению и обратные по направлению пондеромоторные силы (ПС) тяжения. Очевидно, что силы, действующие на 1 ый и 4 ый зубцы ротора, будут стремиться повернуть его по часовой стрелке, а силы, действующие на 2 ой и 5 ый зубцы – против. В силу того, что ротор в данном положении симметричен относительно оси возбужденной фазы, равнодействующая азимутальной составляющей этих сил будет равна нулю. Таким образом, в рассогласованном положении ИМ и ВИД не развивают вращающего момента. Рассогласованное положение представляет собой точку неустойчивого равновесия. Действительно, если под действием какого–либо внешнего воздействия ротор отклонится от рассогласованного положения в том или ином направлении, то равнодействующая азимутальных составляющих ПС сердечников уже не будет равна нулю. Следовательно, возникнет вращающий момент, который будет стремиться повернуть ротор в направлении от рассогласованного положения.
В магнитном поле фазы А ротор будет стремиться ориентироваться таким образом, чтобы магнитный поток, пронизывающий его, принял максимальное значение. При этом на сердечники статора и ротора будут действовать одинаковые по значению и обратные по направлению пондеромоторные силы (ПС) тяжения. Очевидно, что силы, действующие на 1 ый и 4 ый зубцы ротора, будут стремиться повернуть его по часовой стрелке, а силы, действующие на 2 ой и 5 ый зубцы – против. В силу того, что ротор в данном положении симметричен относительно оси возбужденной фазы, равнодействующая азимутальной составляющей этих сил будет равна нулю. Таким образом, в рассогласованном положении ИМ и ВИД не развивают вращающего момента. Рассогласованное положение представляет собой точку неустойчивого равновесия. Действительно, если под действием какого–либо внешнего воздействия ротор отклонится от рассогласованного положения в том или ином направлении, то равнодействующая азимутальных составляющих ПС сердечников уже не будет равна нулю. Следовательно, возникнет вращающий момент, который будет стремиться повернуть ротор в направлении от рассогласованного положения.
 Возьмем другое положение ротора, показанное на рис. б. Здесь фаза А имеет большее потокосцепление и индуктивность, чем в рассогласованном положении, что объясняется меньшей величиной зазора между сердечниками. При этом равнодействующая азимутальных составляющих ПС сердечников отлична от нуля, и созданный ею электромагнитный момент стремиться повернуть ротор ИМ против часовой стрелки. Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис. В. Оно называется согласованным положением фазы А.
Возьмем другое положение ротора, показанное на рис. б. Здесь фаза А имеет большее потокосцепление и индуктивность, чем в рассогласованном положении, что объясняется меньшей величиной зазора между сердечниками. При этом равнодействующая азимутальных составляющих ПС сердечников отлична от нуля, и созданный ею электромагнитный момент стремиться повернуть ротор ИМ против часовой стрелки. Вращение ротора будет продолжаться до тех пор, пока он не займет положение, показанное на рис. В. Оно называется согласованным положением фазы А.
 Согласованным положением сердечников статора и ротора ИМ для какой–либо фазы называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей d ротора, то есть зубцы фазы располагаются строго напротив полюсов ротора. Это положение характеризуется максимальным значением индуктивности фазы и сцепленного с ней магнитного потока, что объясняется минимальной величиной магнитного сопротивления зазора между сердечниками. В этом положении ПС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ИМ в этом положении равен нулю. Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой–либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
Согласованным положением сердечников статора и ротора ИМ для какой–либо фазы называется такое положение, при котором ось каждой катушки этой фазы совпадает с одной из осей d ротора, то есть зубцы фазы располагаются строго напротив полюсов ротора. Это положение характеризуется максимальным значением индуктивности фазы и сцепленного с ней магнитного потока, что объясняется минимальной величиной магнитного сопротивления зазора между сердечниками. В этом положении ПС притяжения сердечников имеют только радиальные составляющие. В силу чего вращающий момент ИМ в этом положении равен нулю. Согласованное положение представляет собой точку устойчивого равновесия. Действительно, если под действием какой–либо внешней силы ротор отклонится от согласованного положения в ту или иную сторону, то возникший электромагнитный момент будет стремиться вернуть его в согласованное положение.
 Шумы и вибрации ВИД Пондеромоторные силы взаимодействия сердечников статора и ротора в ВИД имеют две составляющих: азимутальную, определяющую вращающий момент двигателя, и радиальную, наличие которой влечет за собой деформацию сердечников. Деформация сердечников приводит к возникновению вибрации двигателя и излучению звуковых волн. Исследования показывают, что основным элементом конструкции ВИД, излучающим звуковые волны, является сердечник статора. Для снижения уровня шумов и вибраций следует проектировать ВИД таким образом, чтобы резонансные частоты сердечника статора принимали как можно большие значения. При этом резко снижается вероятность того, что первые гармоники в кривой пондеромоторной силы будут иметь частоты, совпадающие с резонансными. Исследования показывают, что наиболее важными являются первые три резонансные частоты. Характер деформаций статора при возникновении резонанса по ним для случая 3 х-фазного двигателя конфигурации 6/4 представлен на рис.
Шумы и вибрации ВИД Пондеромоторные силы взаимодействия сердечников статора и ротора в ВИД имеют две составляющих: азимутальную, определяющую вращающий момент двигателя, и радиальную, наличие которой влечет за собой деформацию сердечников. Деформация сердечников приводит к возникновению вибрации двигателя и излучению звуковых волн. Исследования показывают, что основным элементом конструкции ВИД, излучающим звуковые волны, является сердечник статора. Для снижения уровня шумов и вибраций следует проектировать ВИД таким образом, чтобы резонансные частоты сердечника статора принимали как можно большие значения. При этом резко снижается вероятность того, что первые гармоники в кривой пондеромоторной силы будут иметь частоты, совпадающие с резонансными. Исследования показывают, что наиболее важными являются первые три резонансные частоты. Характер деформаций статора при возникновении резонанса по ним для случая 3 х-фазного двигателя конфигурации 6/4 представлен на рис.
 Деформация статора при резонансе по первой резонансной частоте. Деформация статора при резонансе по третьей резонансной частоте. Деформация статора при резонансе по второй резонансной частоте Деформация сердечника статора при работе ВИД.
Деформация статора при резонансе по первой резонансной частоте. Деформация статора при резонансе по третьей резонансной частоте. Деформация статора при резонансе по второй резонансной частоте Деформация сердечника статора при работе ВИД.
 Достоинства и недостатки ВИД Все достоинства и недостатки ВИД можно разделить на две группы: – характеристики, обусловленные ИМ; – характеристики, обусловленные преобразователем частоты и системой управления; В соответствии с этими группами ниже приведены достоинства и недостатки ВИД.
Достоинства и недостатки ВИД Все достоинства и недостатки ВИД можно разделить на две группы: – характеристики, обусловленные ИМ; – характеристики, обусловленные преобразователем частоты и системой управления; В соответствии с этими группами ниже приведены достоинства и недостатки ВИД.
 Достоинства ВИД и недостатки, обусловленные ИМ: Достоинства – простота и технологичность конструкции ИМ; – низкая себестоимость; – высокая надежность; – высокая ремонтопригодность; – низкие потери в роторе; – минимальные температурные эффекты; – низкий момент инерции; – возможность работы на больших частотах вращения; – возможность работы в агрессивных средах; – высокая степень утилизации. Недостатки – высокий уровень шумов и вибраций; – плохое использование стали; – работа возможна только совместно с преобразователем частоты; – значительные отходы при штамповке;
Достоинства ВИД и недостатки, обусловленные ИМ: Достоинства – простота и технологичность конструкции ИМ; – низкая себестоимость; – высокая надежность; – высокая ремонтопригодность; – низкие потери в роторе; – минимальные температурные эффекты; – низкий момент инерции; – возможность работы на больших частотах вращения; – возможность работы в агрессивных средах; – высокая степень утилизации. Недостатки – высокий уровень шумов и вибраций; – плохое использование стали; – работа возможна только совместно с преобразователем частоты; – значительные отходы при штамповке;
 Достоинства и недостатки ВИД, обусловленные преобразователем частоты и системой управления: Достоинства: – возможность оптимального управления процессом электромеханического преобразования энергии для конкретного нагрузочного устройства; – высокие массо-габаритные и энергетические характеристики. Недостатки: – пониженная электросовместимость с сетью из-за высокого содержания высших гармоник в токах обмоток.
Достоинства и недостатки ВИД, обусловленные преобразователем частоты и системой управления: Достоинства: – возможность оптимального управления процессом электромеханического преобразования энергии для конкретного нагрузочного устройства; – высокие массо-габаритные и энергетические характеристики. Недостатки: – пониженная электросовместимость с сетью из-за высокого содержания высших гармоник в токах обмоток.
present5.com
Предложение относится к электрическим машинам и может быть применено при конструировании и изготовлении вентильно-индукторных двигателей с кольцевой обмоткой возбуждения, размещенной на статоре.
Технический результат полезной модели - снижение уровня шумов, издаваемых вращающимся вентильно-индукторным двигателем в области акустических частот.
Двигатель содержит станину 1 с торцевыми щитами 2, в которых на опорах 3 вращения установлен вал 4. Станина 1 и щиты 2 образуют корпус, в полости которого на станине 1 вдоль вала 4 соосно закреплены две пары зубчатых пакетов 5 статора. Между пакетами 5 каждой пары размещены кольцевые обмотки 6 возбуждения. Фазные обмотки 7, число которых кратно шести, охватывают одноименные зубцы 8 пакетов 5 статора. На валу 4 напротив зубчатых пакетов 5 статора закреплены со сдвигом относительно друг друга две пары зубчатых пакетов 9 ротора с зубцами 10. Число зубцов 8 пакетов 5 статора кратно шести, а число зубцов 10 пакетов 9 ротора кратно двум, больше шести и не равно числу зубцов пакетов статора. 1 з.п.ф., 2 ил.
Область техники
Предложение относится к электрическим машинам и может быть применено при конструировании и изготовлении вентильно-индукторных двигателей с кольцевой обмоткой возбуждения, размещенной на статоре.
Уровень техники
Известны вентильно-индукторные двигатели, содержащие корпус в виде станины с торцевыми щитами, в которых на опорах вращения установлен вал, по меньшей мере, одну пару зубчатых пакетов статора, соосно закрепленных на станине вдоль оси вала, между которыми размещена кольцевая обмотка возбуждения, фазные обмотки, охватывающие зубцы пакетов статора, и зубчатые пакеты ротора, закрепленные на валу напротив зубчатых пакетов статора [RU 2277284 МПК Н02К 19/10, 2006]. Фазные обмотки образуют несколько трехфазных групп, питаемых вентильными преобразователями. В известном двигателе число зубцов пакетов статора кратно шести, а число зубцов пакетов ротора является простым числом, начиная с пяти (5, 7, 11, 13, 17..).
Вентильно-индукторные двигатели имеют перед двигателями других типов (асинхронными, синхронными) ряд преимуществ, описанных, в частности, в указанном патенте.
Основным недостатком известных вентильно-индукторных двигателей, препятствующим их широкому распространению, является высокий уровень вибрации и шума, издаваемого вращающимся двигателем в наиболее чувствительной для человеческого уха частотной области - 300÷3000 гц.
Задача полезной модели - устранить указанный недостаток.
Раскрытие существа полезной модели
Технический результат, достигаемый при использовании полезной модели - снижение уровня вибрации и шума, издаваемого вращающимся вентильно-индукторным двигателем в частотной области слышимости человеческого уха.
Предметом полезной модели является вентильно-индукторный двигатель, содержащий станину с торцевыми щитами, в которых на опорах вращения установлен вал, по меньшей мере, одну пару зубчатых пакетов статора, соосно закрепленных на станине вдоль оси вала, между которыми размещена кольцевая обмотка возбуждения, фазные обмотки, охватывающие зубцы пакетов статора, и зубчатые пакеты ротора, закрепленные на валу напротив зубчатых пакетов статора, при этом число зубцов пакетов статора кратно шести, а число зубцов пакетов ротора кратно двум, больше шести и не равно числу зубцов пакетов статора.
В отличие от известного устройства в предлагаемом двигателе число зубцов пакетов ротора четное. Как показал сравнительный машинный имитационный эксперимент, в котором исследовались радиальные усилия, возникающие на корпусах вентильно-индукторных двигателей с различным числом зубцов на пакетах ротора, приведенная совокупность признаков позволяет многократно снизить уровень акустического шума от вращающихся вентильно-индукторных двигателей и. тем самым, улучшить экологическую обстановку в местах их работы.
Полезная модель имеет развитие, уточняющее число зубцов пакетов статора и ротора для частного случая.
Осуществление полезной модели с учетом ее развития
На фиг.1 и фиг.2 показан пример осуществления предлагаемого вентильно-индукторного двигателя с учетом развития полезной модели. На фиг.1 представлено осевое сечение двигателя, на фиг.2 - радиальное сечение корпуса двигателя с установленными в нем пакетами ротора и статора (обмотки условно не показаны).
Двигатель (см. фиг.1) содержит станину 1 с торцевыми щитами 2, в которых на опорах 3 вращения установлен вал 4 из немагнитного материала, например, нержавеющей стали. Станина 1 и щиты 2 образуют корпус, в полости которого на станине 1 вдоль вала 4 соосно закреплены две пары зубчатых пакетов 5 статора. Между пакетами 5 каждой пары размещены кольцевые обмотки 6 возбуждения. Фазные обмотки 7, число которых кратно трем, состоят из двух катушек, каждая из которых охватывает одноименные зубцы 8 (см. фиг.2) пакетов 5 статора. При этом число зубцов пакетов статора кратно шести. Катушки одной фазной обмотки сдвинуты относительно друг друга на 180 электрических градусов.
Напротив зубчатых пакетов 5 статора на валу 4 закреплены со сдвигом относительно друг друга две пары зубчатых пакетов 9 ротора с зубцами 10. Число зубцов 8 каждого пакета 5 статора равно двадцати четырем, а число зубцов 10 каждого пакета 9 ротора равно десяти.
Крепление пакетов 9 ротора выполнено с помощью втулки 11 из магнитомягкого материала, обеспечивающей магнитную связь между пакетами 9 ротора. Пакеты 5 статора и пакеты 9 ротора шихтованы из листов электротехнической стали.
Устройство работает следующим образом.
Обмотки 6 возбуждения и фазные обмотки 7 запитываются от внешних источников: обмотки возбуждения 6 - постоянным током от возбудителя, а фазные обмотки 7 - напряжениями регулируемой частоты от трехфазных вентильных преобразователей. Магнитные потоки, создаваемые размещенными на статоре фазными обмотками 7 и обмотками 6 возбуждения, замыкаются через пакеты 9 ротора. Принцип действия двигателя основан на магнитном притяжении зубца пакета ротора к ближайшему зубцу пакета статора.
Трехфазные токи в фазных обмотках 7, задаваемые питающими их вентильными преобразователями, при неравенстве числа зубцов 8 в пакетах 5 статора и числа зубцов 10 в пакетах 9 ротора обеспечивают вращение вала 4 с частотой и вращающим моментом, значения которых регулируются системой управления вентильными преобразователями.
Из-за неизбежной на практике несимметрии кругового воздушного зазора между поверхностями зубцов 8 статора и зубцов 10 ротора (вызванной, например, несоосностью статора и ротора) электромагнитные силы, радиально действующие на корпус двигателя, при вращении вала 4 не остаются постоянными, а имеют переменную составляющую. Переменные силовые воздействия вызывают вибрации корпуса и других элементов конструкции, являющиеся источниками шума. Частота переменной составляющей зависит от частоты вращения вала и числа зубцов пакетов статора и ротора, а ее уровень от степени несимметрии магнитного зазора между пакетами статора и ротора.
Экспериментальные исследования двигателя с роторами, имеющими различное число зубцов при одинаковых степенях несимметрии магнитного зазора (в 10, 20, 30, 40 и 50%), проводились на двигателе, статор которого имеет двадцать четыре зубца. Исследования показали, что не только частота, но и уровень переменных силовых воздействий зависит от числа зубцов ротора и при прочих равных условиях существенно меньше для роторов с четным числом зубцов. При этом КПД двигателя снижается незначительно по сравнению с оптимальным в отношении КПД случаем, когда число зубцов ротора равно простому числу. Например, для роторов с десятью и четырнадцатью зубцами снижение КПД не превышает 0,5%. Для вентильно-индукторных двигателей с рабочим диапазоном частот вращения 750-1500 об/мин, характерным, например, для приводов сетевых насосов теплоснабжения, наибольшее снижение шума дает использование ротора с десятью зубцами.
1. Вентильно-индукторный двигатель, содержащий станину с торцевыми щитами, в которых на опорах вращения установлен его вал, по меньшей мере, одну пару зубчатых пакетов статора, соосно закрепленных на станине вдоль оси вала, между которыми размещена кольцевая обмотка возбуждения, фазные обмотки, охватывающие зубцы пакетов статора, и зубчатые пакеты ротора, закрепленные на валу напротив зубчатых пакетов статора, при этом число зубцов пакетов статора кратно шести, а число зубцов пакетов ротора кратно двум, больше шести и не равно числу зубцов пакетов статора.
2. Вентильно-индукторный двигатель по п.1, в котором число зубцов пакетов статора равно двадцати четырем, а число зубцов пакетов ротора - десяти или четырнадцати.

poleznayamodel.ru
Изобретение относится к электротехнике, в частности к электрическим машинам, и может быть использовано в электроприводе, на транспорте, в системах управления. Техническим результатом, достигаемым данным изобретением, является уменьшение удельной массы и потерь в двигателе, а также повышение пускового момента и снижение пульсации рабочего момента. Сущность изобретения состоит в том, что двигатель состоит из индуктора и якоря, устанавливаемых с возможностью относительного вращения или линейного перемещения и содержащих автономные С-образные сердечники с полюсными выступами, закрепленные напротив друг друга поперек направления относительного перемещения. Катушки возбуждения размещаются на полюсных выступах сердечников индуктора и через управляемые вентильные ключи соединены с источником постоянного напряжения. При циклической подаче тока в катушки возникает магнитное тяжение между сердечниками индуктора и якоря, которое создает рабочий момент или тягу. 2 з.п. ф-лы, 4 ил.
Изобретение относится к электрическим машинам и может быть использовано в электроприводе, на транспорте, в системах управления.
Известны электрические машины с переменным магнитным сопротивлением - индукторные и реактивные, обладающие простой конструкцией благодаря безобмоточному ротору и отсутствию щеточных контактов [1]. Их недостатком являются необходимость размещения на статоре распределенных статорных обмоток и увеличенная масса магнитопровода. Известны также вентильно-индукторные двигатели, широко применяемые в современных технологиях [2]. Наиболее близкий к данному изобретению является вентильно-индукторный реактивный двигатель (называемый в английской литературе Switched Reluctance Motor - SRМ)[3], содержащий индуктор, на котором размещается шихтованный магнитопровод с полюсными выступами, охваченными фазными катушками возбуждения с вентильными коммутаторами для поочередного подключения катушек фаз к источнику постоянного тока, и якорь, установленный с возможностью рабочего перемещения относительно индуктора и снабженный магнитопроводом с полюсными выступами, число которых не равно числу полюсных выступов индуктора, причем размеры выступов обеспечивают циклическое согласованное расположение выступов индуктора и якоря напротив друг друга через рабочий зазор одновременно для одной фазы. Индуктор размещен на наружном цилиндрическом статоре и выполнен в виде общего для всех фаз кольцевого сердечника с полюсными выступами, обращенными к оси двигателя и охваченными фазными катушками, подключенными через вентильные ключи к сети постоянного тока, а якорь размещен на роторе и выполнен в виде цилиндрического сердечника с наружными полюсными выступами, обращенными к индуктору. Ротор закреплен в подшипниках с возможностью вращения относительно статора. Как и любая электрическая машина, двигатель может выполняться линейным, когда индуктор и якорь изготовляются в виде параллельных сплошных линейных сердечников с обращенными друг к другу полюсными выступами и катушками возбуждения на выступах индуктора. Недостатками двигателя как в цилиндрическом, так и в линейном варианте являются большие удельная масса (кг/кВт) и потери, а также пониженный пусковой момент и значительные пульсации рабочего момента. Повышенная удельная масса двигателя определяется, во-первых, относительно низкими значениями главного показателя эффективности работы двигателя - кратности изменения магнитной проводимости ( ): к = max/min, так как при рассогласованном положении полюсных выступов индуктора и якоря, когда = min, имеются значительные потоки рассеяния, замыкающиеся через кольцевой магнитопровод якоря, противолежащий полюсным выступам индуктора. В известных конструкциях к
): к = max/min, так как при рассогласованном положении полюсных выступов индуктора и якоря, когда = min, имеются значительные потоки рассеяния, замыкающиеся через кольцевой магнитопровод якоря, противолежащий полюсным выступам индуктора. В известных конструкциях к  10. Во-вторых, большая масса и пониженный пусковой момент двигателя объясняются тем, что пусковой и рабочий моменты создаются одновременно полюсными выступами индуктора для одной фазы, число которых нельзя существенно увеличить, так как при этом полюса сужаются, увеличивается магнитное рассеяние и падает к. Число фаз двигателя m=z1/2, где z1 - число полюсных выступов индуктора в поперечном сечении. Относительно малое число фаз приводит к заметным пульсациям рабочего момента при переключении фазы, что ухудшает рабочие и акустические характеристики двигателя. Кроме того, в двигателе имеются взаимные магнитные потоки между фазами из-за общего магнитопровода, что снижает значение к. Повышенные потери в двигателе возникают из-за большого объема стальных сердечников и большой длины силовых линий рабочего магнитного потока, замыкающихся по кольцевому сердечнику через полюсы одной из фаз, между которыми располагаются полюсы остальных фаз. Кроме того, в линейной модификации двигателя возникают дополнительные магнитные потери в концевых зонах из-за нарушения симметрии магнитной цепи и взаимоиндукции между фазами, имеющими общий сердечник. Целью изобретения является снижение удельной массы и потерь в двигателе, а также повышение пускового момента и уменьшение пульсаций рабочего момента. Цель достигается тем, что магнитопроводы индуктора и якоря выполнены в виде автономных C-образных сердечников с полюсными выступами, расположенных поперек направления относительного рабочего перемещения индуктора и якоря. При цилиндрическом исполнении двигателя индуктор выполнен в виде цилиндра из немагнитного материала, на внутренней стороне которого размещаются последовательно сдвинутые по азимуту и параллельные оси цилиндра C-образные сердечники с катушками возбуждения, а якорь выполнен в виде внутреннего соосного с индуктором цилиндра из немагнитного материала с закрепленными на его периферии C-образными сердечниками, параллельными оси цилиндра. Двигатель допускает линейное исполнение, в котором индуктор выполнен линейным в виде по крайней мере одной немагнитной жесткой полосы, на которой с равномерным продольном сдвигом закреплены поперечные автономные C-образные сердечники с катушками возбуждения, а якорь выполнен в виде аналогичной параллельной полосы, на которой также размещены поперечные автономные C-образные сердечники с соответствующим продольном сдвигом. Во всех модификациях предложенного двигателя индуктор и якорь могут альтернативно размещаться как на неподвижной части (статоре), так и на подвижной части (роторе). Положительный эффект указанной совокупности отличительных признаков заключается в том, что по сравнению с прототипом в двигателе, благодаря отсутствию кольцевых сердечников, существенно уменьшается длина магнитных линий рабочего потока и магнитная проводимость при рассогласованном положении полюсных выступов индуктора и якоря, что повышает кратность изменения магнитной проводимости к и соответственно мощность двигателя в заданных габаритах. Удельная масса двигателя при этом снижается. Кроме того, в двигателе, по сравнению с прототипом, удваивается число фаз (m=z1), так как каждый C-образный сердечник индуктора с катушками может соответствовать одной автономной фазе. Увеличение m приводит к повышению рабочего и пускового моментов (или тяги в линейных конструкциях), т.е. снижению его удельной массы и улучшению пускового режима, а также к уменьшению пульсации момента (тяги). Благодаря автономности сердечников и фаз исключается их вредное взаимное индуктивное влияние, что также повышает к и снижает удельную массу двигателя. Объем и масса стальных сердечников уменьшаются благодаря отсутствию общих для всех фаз наружных и внутренних кольцевых сердечников индуктора и якоря, что приводит к снижению удельной массы и повышению КПД. Объем поперечных участков C-образных сердечников существенно меньше объема исключаемых кольцевых сердечников индуктора и якоря. В линейной модификации двигателя исключаются концевые эффекты благодаря автономности фаз и симметрии магнитных цепей, что также снижает потери в двигателе и его удельную массу. При линейном исполнении прототипа в концевых зонах необходимо было бы размещать дополнительные холостые полюсные выступы или увеличивать толщину продольных сердечников для облегчения замыкания рабочего потока. Кроме того, линейный двигатель для наиболее актуальных транспортных применений позволяет обеспечить магнитный подвес и боковую стабилизацию подвижного элемента, что также уменьшает удельную массу и потери по сравнению с установками, имеющими отдельные системы подвеса и стабилизации [4]. На фиг. 1 показан продольный разрез вентильно-индукторного реактивного двигателя в цилиндрическом исполнении; на фиг. 2 - его поперечное сечение; на фиг. 3 - продольный разрез линейного вентильно-индукторного реактивного двигателя; на фиг. 4 - поперечное сечение линейного двигателя. В цилиндрическом исполнении (фиг. 1 и 2) двигатель содержит индуктор 1 в виде наружного немагнитного цилиндра 2, на внутренней стороне которого установлены параллельно оси автономные C-образные шихтованные сердечники 3 с катушками возбуждения 4, подключенными через вентильные коммутаторы (не показаны) к сети постоянного тока. Якорь 5 выполнен в виде внутреннего немагнитного цилиндра 6, на периферии которого закреплены параллельно оси автономные C-образные шихтованные сердечники 7. Рабочие поверхности полюсных выступов сердечников 3 и 7 имеют цилиндрический профиль. Цилиндр 6 крепится на валу 8, закрепленном в подшипниках 9 с помощью боковых щитов 10 и 11. Крепление C-образных сердечников может осуществляться, например, винтами 12 и 13, с помощью клея, штифтов или зажимов (не показаны). Сердечники 3 и 7 равномерно сдвинуты по азимуту и в согласованном положении отделены друг от друга рабочим зазором 14 с цилиндрическим профилем. Отношение сердечников 3 и 7 определяется необходимым числом фаз и обычно равно 6/4, 8/6 и т.д. [3]. Возможно обращенное исполнение двигателя (не показано), когда индуктор выполняется в виде внутреннего немагнитного цилиндра, на внешней стороне которого размещаются параллельно оси C-обраные сердечники с катушками возбуждения, а якорь выполнен в виде наружного немагнитного цилиндра с закрепленными на его внутренней стороне параллельно оси C-образными сердечниками. В линейном исполнении (фиг. 3 и 4) индуктор двигателя 15 выполнен в виде немагнитной жесткой полосы 16, на которой закреплены поперечные C-образные сердечники 17 с катушками возбуждения 4. Линейный якорь 18 содержит аналогичную немагнитную жесткую полосу 19, на которой закреплены поперечные C-образные сердечники 20. Рабочие поверхности полюсных выступов 17 и 20 плоские. В согласованном положении сердечники 17 и 20 разделены линейным рабочим зазором 21. Сердечники 17 и 20 крепятся на полосах (16 и 19), например, винтами 12 и 13 или скобами, штифтами, клеем (не показаны). Катушки возбуждения 4 в цилиндрическом и линейном двигателях могут размещаться как на обоих полюсных выступах каждого C-образного сердечника индуктора, так и на одном из них с целью уменьшения объема проводников и снижения потерь. Сердечники индуктора и якоря наматываются из стальной ленты с последующим разрезанием аналогично сердечникам типа ШЛ для трансформаторов [5]. Могут использоваться стандартные серийно выпускаемые блоки трансформаторных сердечников. При больших мощностях двигателя (более десятков киловатт) возможно изготовление составных C-образных сердечников в виде прямоугольных блоков из шихтованной листовой стали, скрепляемых винтами или клеем [1]. Работает двигатель следующим образом. По заданной программе катушки возбуждения 4 каждой фазы с помощью простых вентильных коммутаторов (транзисторных или тиристорных) циклически подключаются к сети или источнику постоянного напряжения при рассогласованном положении полюсных выступов, когда магнитная проводимость минимальна (min). Ток в катушках благодаря малой индуктивности быстро нарастает и создает магнитный поток, замыкающийся через рабочий зазор по смежным C-образным сердечником индуктора и якоря. В работающей фазе эти сердечники смещены друг относительно друга, поэтому возникает сила магнитного тяжения (тяга), стремящаяся установить сердечники индуктора и якоря в согласованное положение, когда магнитная проводимость максимальна (max). Благодаря тяге возникает движение якоря относительно индуктора и перемещение механической нагрузки. Очевидно, что тяга двигателя (или момент) тем больше, чем больше кратность к = max/min При приближении полюсных выступов якоря к согласованному положению данная фаза отключается и включаются катушки следующей фазы, в которой C-образные сердечники индуктора и якоря имеют необходимое смещение. Благодаря этому тяга сохраняется. Затем включается следующая фаза и т.д. При отключении катушек часть запасаемой в них магнитной энергии рекуперируется в сеть через обратные диоды или компенсируется в дополнительных емкостях. Пульсации рабочего момента и тяги будут тем меньше, а пусковые режимы тем лучше, чем больше фаз в двигателе. Описанная электрическая машина согласно принципу обратимости может работать как в режиме двигателя, так и в режиме генератора. Предложенный двигатель обеспечивает уменьшение удельной массы на 20% и потерь на 20-30% по сравнению с прототипом. Он позволяет повысить пусковой момент (тягу) на 10-20% и в несколько раз понизить пульсации рабочего момента (тяги). Линейный двигатель помимо других применений может эффективно использоваться для транспортных систем, создавая как рабочую продольную тягу, так и силы магнитного подвеса и боковой стабилизации. При использовании предложенного линейного двигателя на транспорте возможно размещение индуктора на экипаже, а якоря на полотне или, наоборот, якоря на экипаже, индуктора на полотне. В первом случае требуется питание катушек возбуждения через контактную сеть, однако конструктивно простое полотно дороги - конструктивно простое. Оно состоит из опорной (например, бетонной) поверхности, на которой закреплены пассивные C-образные сердечники. Такое полотно примерно в 10 раз дешевле традиционного полотна для скоростного транспорта, содержащего непрерывный линейный магнитопровод с уложенной в его пазах распределенной многофазной обмоткой, создающей синусоидальное бегущее поле [4]. Во втором случае усложняется конструкция полотна, содержащего индуктор, но существенно упрощается тяговое оборудование на экипаже, состоящее только из набора пассивных автономных C-образных сердечников. Масса и стоимость подвижной части тягового оборудования уменьшаются примерно в 2-2,5 раза по сравнению с традиционными системами, предполагающими размещение на экипаже электромагнитов тяги, подвеса и боковой стабилизации, с их питанием от вспомогательного линейного генератора [4]. Источники информации 1. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины. - М. :Высшая школа, 1987, ч. 1-2. 2. Ильинский Н.Ф. Перспективы применения вентильно-индукторного привода в современных технологиях. Электротехника, 1997, N 2. 3. Miller T.J. E.Switched Reluctance Motors and Their Control. - Oxford: Magna Physics Publishing and Clarendon Press, 1993. 4. Транспорт с магнитным подвесом. Ю.А.Бахвалов, В.И.Бочаров, В.А.Винокуров и др.; под ред. В.И.Бочарова, В.Д.Нагорского. - М.:Машиностроение, 1991. 5. Бальян Р.Х. Трансформаторы для радиоэлектроники. - М.: "Сов. радио", 1971.
10. Во-вторых, большая масса и пониженный пусковой момент двигателя объясняются тем, что пусковой и рабочий моменты создаются одновременно полюсными выступами индуктора для одной фазы, число которых нельзя существенно увеличить, так как при этом полюса сужаются, увеличивается магнитное рассеяние и падает к. Число фаз двигателя m=z1/2, где z1 - число полюсных выступов индуктора в поперечном сечении. Относительно малое число фаз приводит к заметным пульсациям рабочего момента при переключении фазы, что ухудшает рабочие и акустические характеристики двигателя. Кроме того, в двигателе имеются взаимные магнитные потоки между фазами из-за общего магнитопровода, что снижает значение к. Повышенные потери в двигателе возникают из-за большого объема стальных сердечников и большой длины силовых линий рабочего магнитного потока, замыкающихся по кольцевому сердечнику через полюсы одной из фаз, между которыми располагаются полюсы остальных фаз. Кроме того, в линейной модификации двигателя возникают дополнительные магнитные потери в концевых зонах из-за нарушения симметрии магнитной цепи и взаимоиндукции между фазами, имеющими общий сердечник. Целью изобретения является снижение удельной массы и потерь в двигателе, а также повышение пускового момента и уменьшение пульсаций рабочего момента. Цель достигается тем, что магнитопроводы индуктора и якоря выполнены в виде автономных C-образных сердечников с полюсными выступами, расположенных поперек направления относительного рабочего перемещения индуктора и якоря. При цилиндрическом исполнении двигателя индуктор выполнен в виде цилиндра из немагнитного материала, на внутренней стороне которого размещаются последовательно сдвинутые по азимуту и параллельные оси цилиндра C-образные сердечники с катушками возбуждения, а якорь выполнен в виде внутреннего соосного с индуктором цилиндра из немагнитного материала с закрепленными на его периферии C-образными сердечниками, параллельными оси цилиндра. Двигатель допускает линейное исполнение, в котором индуктор выполнен линейным в виде по крайней мере одной немагнитной жесткой полосы, на которой с равномерным продольном сдвигом закреплены поперечные автономные C-образные сердечники с катушками возбуждения, а якорь выполнен в виде аналогичной параллельной полосы, на которой также размещены поперечные автономные C-образные сердечники с соответствующим продольном сдвигом. Во всех модификациях предложенного двигателя индуктор и якорь могут альтернативно размещаться как на неподвижной части (статоре), так и на подвижной части (роторе). Положительный эффект указанной совокупности отличительных признаков заключается в том, что по сравнению с прототипом в двигателе, благодаря отсутствию кольцевых сердечников, существенно уменьшается длина магнитных линий рабочего потока и магнитная проводимость при рассогласованном положении полюсных выступов индуктора и якоря, что повышает кратность изменения магнитной проводимости к и соответственно мощность двигателя в заданных габаритах. Удельная масса двигателя при этом снижается. Кроме того, в двигателе, по сравнению с прототипом, удваивается число фаз (m=z1), так как каждый C-образный сердечник индуктора с катушками может соответствовать одной автономной фазе. Увеличение m приводит к повышению рабочего и пускового моментов (или тяги в линейных конструкциях), т.е. снижению его удельной массы и улучшению пускового режима, а также к уменьшению пульсации момента (тяги). Благодаря автономности сердечников и фаз исключается их вредное взаимное индуктивное влияние, что также повышает к и снижает удельную массу двигателя. Объем и масса стальных сердечников уменьшаются благодаря отсутствию общих для всех фаз наружных и внутренних кольцевых сердечников индуктора и якоря, что приводит к снижению удельной массы и повышению КПД. Объем поперечных участков C-образных сердечников существенно меньше объема исключаемых кольцевых сердечников индуктора и якоря. В линейной модификации двигателя исключаются концевые эффекты благодаря автономности фаз и симметрии магнитных цепей, что также снижает потери в двигателе и его удельную массу. При линейном исполнении прототипа в концевых зонах необходимо было бы размещать дополнительные холостые полюсные выступы или увеличивать толщину продольных сердечников для облегчения замыкания рабочего потока. Кроме того, линейный двигатель для наиболее актуальных транспортных применений позволяет обеспечить магнитный подвес и боковую стабилизацию подвижного элемента, что также уменьшает удельную массу и потери по сравнению с установками, имеющими отдельные системы подвеса и стабилизации [4]. На фиг. 1 показан продольный разрез вентильно-индукторного реактивного двигателя в цилиндрическом исполнении; на фиг. 2 - его поперечное сечение; на фиг. 3 - продольный разрез линейного вентильно-индукторного реактивного двигателя; на фиг. 4 - поперечное сечение линейного двигателя. В цилиндрическом исполнении (фиг. 1 и 2) двигатель содержит индуктор 1 в виде наружного немагнитного цилиндра 2, на внутренней стороне которого установлены параллельно оси автономные C-образные шихтованные сердечники 3 с катушками возбуждения 4, подключенными через вентильные коммутаторы (не показаны) к сети постоянного тока. Якорь 5 выполнен в виде внутреннего немагнитного цилиндра 6, на периферии которого закреплены параллельно оси автономные C-образные шихтованные сердечники 7. Рабочие поверхности полюсных выступов сердечников 3 и 7 имеют цилиндрический профиль. Цилиндр 6 крепится на валу 8, закрепленном в подшипниках 9 с помощью боковых щитов 10 и 11. Крепление C-образных сердечников может осуществляться, например, винтами 12 и 13, с помощью клея, штифтов или зажимов (не показаны). Сердечники 3 и 7 равномерно сдвинуты по азимуту и в согласованном положении отделены друг от друга рабочим зазором 14 с цилиндрическим профилем. Отношение сердечников 3 и 7 определяется необходимым числом фаз и обычно равно 6/4, 8/6 и т.д. [3]. Возможно обращенное исполнение двигателя (не показано), когда индуктор выполняется в виде внутреннего немагнитного цилиндра, на внешней стороне которого размещаются параллельно оси C-обраные сердечники с катушками возбуждения, а якорь выполнен в виде наружного немагнитного цилиндра с закрепленными на его внутренней стороне параллельно оси C-образными сердечниками. В линейном исполнении (фиг. 3 и 4) индуктор двигателя 15 выполнен в виде немагнитной жесткой полосы 16, на которой закреплены поперечные C-образные сердечники 17 с катушками возбуждения 4. Линейный якорь 18 содержит аналогичную немагнитную жесткую полосу 19, на которой закреплены поперечные C-образные сердечники 20. Рабочие поверхности полюсных выступов 17 и 20 плоские. В согласованном положении сердечники 17 и 20 разделены линейным рабочим зазором 21. Сердечники 17 и 20 крепятся на полосах (16 и 19), например, винтами 12 и 13 или скобами, штифтами, клеем (не показаны). Катушки возбуждения 4 в цилиндрическом и линейном двигателях могут размещаться как на обоих полюсных выступах каждого C-образного сердечника индуктора, так и на одном из них с целью уменьшения объема проводников и снижения потерь. Сердечники индуктора и якоря наматываются из стальной ленты с последующим разрезанием аналогично сердечникам типа ШЛ для трансформаторов [5]. Могут использоваться стандартные серийно выпускаемые блоки трансформаторных сердечников. При больших мощностях двигателя (более десятков киловатт) возможно изготовление составных C-образных сердечников в виде прямоугольных блоков из шихтованной листовой стали, скрепляемых винтами или клеем [1]. Работает двигатель следующим образом. По заданной программе катушки возбуждения 4 каждой фазы с помощью простых вентильных коммутаторов (транзисторных или тиристорных) циклически подключаются к сети или источнику постоянного напряжения при рассогласованном положении полюсных выступов, когда магнитная проводимость минимальна (min). Ток в катушках благодаря малой индуктивности быстро нарастает и создает магнитный поток, замыкающийся через рабочий зазор по смежным C-образным сердечником индуктора и якоря. В работающей фазе эти сердечники смещены друг относительно друга, поэтому возникает сила магнитного тяжения (тяга), стремящаяся установить сердечники индуктора и якоря в согласованное положение, когда магнитная проводимость максимальна (max). Благодаря тяге возникает движение якоря относительно индуктора и перемещение механической нагрузки. Очевидно, что тяга двигателя (или момент) тем больше, чем больше кратность к = max/min При приближении полюсных выступов якоря к согласованному положению данная фаза отключается и включаются катушки следующей фазы, в которой C-образные сердечники индуктора и якоря имеют необходимое смещение. Благодаря этому тяга сохраняется. Затем включается следующая фаза и т.д. При отключении катушек часть запасаемой в них магнитной энергии рекуперируется в сеть через обратные диоды или компенсируется в дополнительных емкостях. Пульсации рабочего момента и тяги будут тем меньше, а пусковые режимы тем лучше, чем больше фаз в двигателе. Описанная электрическая машина согласно принципу обратимости может работать как в режиме двигателя, так и в режиме генератора. Предложенный двигатель обеспечивает уменьшение удельной массы на 20% и потерь на 20-30% по сравнению с прототипом. Он позволяет повысить пусковой момент (тягу) на 10-20% и в несколько раз понизить пульсации рабочего момента (тяги). Линейный двигатель помимо других применений может эффективно использоваться для транспортных систем, создавая как рабочую продольную тягу, так и силы магнитного подвеса и боковой стабилизации. При использовании предложенного линейного двигателя на транспорте возможно размещение индуктора на экипаже, а якоря на полотне или, наоборот, якоря на экипаже, индуктора на полотне. В первом случае требуется питание катушек возбуждения через контактную сеть, однако конструктивно простое полотно дороги - конструктивно простое. Оно состоит из опорной (например, бетонной) поверхности, на которой закреплены пассивные C-образные сердечники. Такое полотно примерно в 10 раз дешевле традиционного полотна для скоростного транспорта, содержащего непрерывный линейный магнитопровод с уложенной в его пазах распределенной многофазной обмоткой, создающей синусоидальное бегущее поле [4]. Во втором случае усложняется конструкция полотна, содержащего индуктор, но существенно упрощается тяговое оборудование на экипаже, состоящее только из набора пассивных автономных C-образных сердечников. Масса и стоимость подвижной части тягового оборудования уменьшаются примерно в 2-2,5 раза по сравнению с традиционными системами, предполагающими размещение на экипаже электромагнитов тяги, подвеса и боковой стабилизации, с их питанием от вспомогательного линейного генератора [4]. Источники информации 1. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины. - М. :Высшая школа, 1987, ч. 1-2. 2. Ильинский Н.Ф. Перспективы применения вентильно-индукторного привода в современных технологиях. Электротехника, 1997, N 2. 3. Miller T.J. E.Switched Reluctance Motors and Their Control. - Oxford: Magna Physics Publishing and Clarendon Press, 1993. 4. Транспорт с магнитным подвесом. Ю.А.Бахвалов, В.И.Бочаров, В.А.Винокуров и др.; под ред. В.И.Бочарова, В.Д.Нагорского. - М.:Машиностроение, 1991. 5. Бальян Р.Х. Трансформаторы для радиоэлектроники. - М.: "Сов. радио", 1971.Формула изобретения
1. Вентильно-индукторный реактивный двигатель, содержащий индуктор, на котором размещается шихтованный магнитопровод с полюсными выступами, охваченными фазными катушками возбуждения с вентильными коммутаторами для поочередного подключения катушек фаз к источнику постоянного тока, и якорь, установленный с возможностью рабочего перемещения относительно индуктора и снабженный магнитопроводом с полюсными выступами, число которых не равно числу полюсных выступов индуктора, причем размеры выступов обеспечивают циклическое согласованное расположение выступов индуктора и якоря напротив друг друга через рабочий зазор единовременно для одной фазы, отличающийся тем, что магнитопроводы индуктора и якоря выполнены в виде автономных С-образных сердечников с полюсными выступами, расположенных поперек направления относительного рабочего перемещения индуктора и якоря, при этом каждый С-образный сердечник индуктора с фазными катушками возбуждения на его полюсных выступах соответствует одной автономной фазе. 2. Вентильно-индукторный реактивный двигатель по п.1, отличающийся тем, что индуктор выполнен в виде наружного цилиндра из немагнитного материала, на внутренней стороне которого размещены последовательно сдвинутые по азимуту и параллельные оси цилиндра автономные С-образные сердечники с фазными катушками возбуждения, а установленный в подшипниках якорь выполнен в виде внутреннего соосного с индуктором цилиндра из немагнитного материала с закрепленными на его периферии С-образными сердечниками, параллельными оси цилиндра. 3. Вентильно-индукторный реактивный двигатель по п.1, отличающийся тем, что индуктор выполнен линейным в виде, по крайней мере, одной немагнитной полосы, на которой с равномерным продольным сдвигом закреплены поперечные автономные С-образные сердечники с фазными катушками возбуждения, а якорь выполнен в виде параллельной индуктору немагнитной полосы, на которой размещены автономные С-образные сердечники с соответствующим продольным сдвигом.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4www.findpatent.ru
Изобретение относится к области электротехники и предназначено для использования в электроприводах различных механизмов и исполнительных устройств автоматических систем. Технический результат, достигаемый при использовании настоящего изобретения, состоит в уменьшении коэффициента возврата энергии, снижении мощности потерь в вентильно-индукторных двигателях и увеличении их крутящего момента. Вентильно-индукторные двигатели предлагаемой конструкции содержат явнополюсный симметричный статор с сосредоточенными обмотками, выполненный из ферромагнитного материала, и двухполюсный симметричный ротор, выполненный из ферромагнитного материала, без обмоток и без постоянных магнитов. Пазы ротора в вентильно-индукторном двигателе заполнены материалом, обладающим диамагнетическими свойствами, а соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами. При таком конструктивном выполнении в вентильно-индукторном двигателе магнитные потоки рассеивания практически отсутствуют из-за того, что пути замыкания этих потоков преграждаются конструктивными элементами, обладающими диамагнетическими свойствами и являющимися по своей сути магнитными изоляторами. Уменьшение магнитных потоков рассеивания приводит к уменьшению коэффициента возврата энергии, уменьшению потерь и увеличению крутящего момента двигателя. 2 ил.
Предлагаемое изобретение относится к электротехнике и предназначено для использования в электроприводах различных механизмов и исполнительных устройствах автоматических систем.
Известен реактивный электродвигатель, содержащий статор с распределенной многофазной обмоткой и явнополюсный ротор с объемными высокотемпературными сверхпроводящими вставками, обладающими свойствами диамагнетиков и играющими роль концентраторов магнитного поля ротора [Ковалев Л.К., Илюшин К.В., Ковалев К.Л., Ларионов С.А. Исследование реактивного электродвигателя с объемными ВТСП элементами в роторе // Электричество, 2002, №5 - с.72-79].
Основными недостатками этого двигателя являются сложная конструкция ротора и большие лобовые части обмоток статора.
Из известных технических решений наиболее близкими по достигаемому результату к предлагаемому изобретению являются реверсивные вентильно-индукторные двигатели, содержащие явнополюсный статор, выполненный из ферромагнитного материала, с сосредоточенными обмотками и явнополюсный пассивный безобмоточный ротор, выполненный из ферромагнитного материала (Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003. - с.6-8, рис.2, 4, 5).
Такие двигатели имеют невысокое соотношение азимутальной и нормальной составляющих пондеромоторных сил и большой коэффициент возврата энергии (Кузнецов В.А., Кузьмичев В.А. Вентильно-индукторные двигатели. - М., Издательство МЭИ, 2003. - с.30). Эти показатели во многом обуславливаются большими потоками рассеивания магнитного поля в пазах статора и ротора. Следовательно, недостатками известных вентильно-индукторных двигателей являются недостаточно высокий крутящий момент, большая мощность омических потерь в обмотках, обусловленных большим коэффициентом возврата энергии, и большая мощность потерь в магнитопроводе, обусловленная наличием потоков рассеивания.
Целью предлагаемого изобретения является увеличение крутящего момента и снижение мощности потерь в вентильно-индукторных двигателях.
Поставленная цель достигается тем, что в известных вентильно-индукторных двигателях, содержащих явнополюсный статор, выполненный из ферромагнитного материала, с полюсами, на которых размещены сосредоточенные обмотки, и явнополюсный ротор, выполненный из ферромагнитного материала, без обмоток и без постоянных магнитов, пазы ротора заполнены материалом, обладающим диамагнетическими свойствами, а соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами.
Диамагнетики имеют χm<0 и малое абсолютное значение, равное (0,1÷10)·106, где: χm - магнитная восприимчивость вещества; идеальными диамагнетиками являются сверхпроводящие материалы (Яворский Б.М., Детлаф А.А. Справочник по физике. - М: Наука, 1968. - С.468-470), поэтому в такой конструкции происходит концентрация магнитного поля в зазоре, в области перекрытия полюсов ротора и статора. При этом уменьшаются потоки рассеивания, это приводит к уменьшению коэффициента возврата энергии, уменьшению потерь и увеличению крутящего момента двигателя.
По сравнению с наиболее близкими аналогичными техническими решениями предлагаемые устройства имеют следующие новые признаки:
1. пазы ротора, выполненного из ферромагнитного материала, заполнены материалом, обладающим диамагнетическими свойствами;
2. соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предлагаемого изобретения уменьшается коэффициент возврата энергии, уменьшаются потери и увеличивается крутящий момент двигателя.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По отличительным признакам проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Вентильно-индукторных двигателей, содержащих явнополюсный статор, выполненный из ферромагнитного материала, с полюсами, на которых размещены сосредоточенные обмотки, и явнополюсный ротор, выполненный из ферромагнитного материала, без обмоток и без постоянных магнитов, пазы которого заполнены материалом, обладающим диамагнетическими свойствами, а соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами, не обнаружено.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
Сущность предлагаемого изобретения поясняется чертежами.
На фиг.1 показан традиционный трехфазный вентильно-индукторный двигатель с удвоенным числом пар полюсов.
На фиг.1 обозначено: 1 - статор; 2 - ротор; 3 - обмотка; 4 - магнитные силовые линии.
На фиг.2 показан трехфазный вентильно-индукторный двигатель с удвоенным числом пар полюсов и концентраторами магнитного поля.
На фиг.2 обозначено: 1 - статор; 2 - ротор; 3 - обмотка; 4 - магнитные силовые линии; 5 - пазы ротора, выполненные из ферромагнитного материала, заполненные материалом, обладающим диамагнетическими свойствами; 6 - Т-образные клинья, выполненные из материалов, обладающих диамагнетическими свойствами.
Положительный эффект, в предлагаемом техническом решении объясняется при сравнении замыкания магнитных силовых линий фиг.1 и фиг.2.
Из фиг.1 видно, что части магнитного потока замыкаются через пазы ротора и статора, эти части магнитного потока являются потоками рассеивания и увеличивают коэффициент возврата энергии, увеличивают потери и уменьшают крутящий момент вентильно - индукторного двигателя.
В вентильно-индукторном двигателе с концентраторами магнитного поля, показанном на фиг.2, пазы ротора которого заполнены материалом, обладающим диамагнетическими свойствами, а соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами, магнитные потоки рассеивания практически отсутствуют из за того, что пути замыкания этих потоков преграждаются конструктивными элементами, выполненными из материала, обладающего диамагнетическими свойствами, и являющимися по своей сути магнитными изоляторами. Это позволяет уменьшить коэффициент возврата энергии, уменьшить потери и увеличить крутящий момент двигателя.
Следовательно, при реализации предлагаемого изобретения улучшаются энергетические характеристики двигателя.
Таким образом, использование в известных вентильно-индукторных двигателях, содержащих явнополюсный статор, выполненный из ферромагнитного материала, на полюсах которого размещены сосредоточенные обмотки, и явнополюсный ротор, выполненный из ферромагнитного материала, без обмоток и без постоянных магнитов, ротора, пазы которого заполнены материалом, обладающим диамагнетическими свойствами, и статора, соседние полуобмотки которого отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами, позволит улучшить технические характеристики оборудования, оснащенного электроприводами с такими вентильно-индукторными двигателями.
Вентильно-индукторный двигатель, содержащий явнополюсный статор, выполненный из ферромагнитного материала, на полюсах которого размещены сосредоточенные обмотки, и явнополюсный ротор, выполненный из ферромагнитного материала, без обмоток и без постоянных магнитов, отличающийся тем, что пазы ротора заполнены материалом, обладающим диамагнетическими свойствами, а соседние полуобмотки статора отделены друг от друга при помощи Т-образных клиньев, выполненных из материалов, обладающих диамагнетическими свойствами.
www.findpatent.ru
ВЕНТИЛЬНО – ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД
ДЛЯ ЭЛЕКТРОТРАНСПОРТА
За последние 20 лет в мире выполнен большой объем исследований и разработок нового вида электрических машин – вентильно–индукторных двигателей (ВИД) и базирующихся на них электроприводов. Этому способствует:
 большая простота устройства ВИД,
определяющая относительно
невысокую стоимость изготовления, а
также простоту и дешевизну их
эксплуатации;
большая простота устройства ВИД,
определяющая относительно
невысокую стоимость изготовления, а
также простоту и дешевизну их
эксплуатации;
стремительное развитие
силовой и управляющей
полупроводниковой техники.
Анализ научно – технической информации, посвященной этому направлению, позволяет сделать вывод о перспективности применения электроприводов с ВИД в качестве тяговых, в особенности для городского и напольного электротранспорта. Предпосылками для этого, кроме уже отмеченных особенностей ВИД, служат его удобная для целей тяги естественная характеристика момент/частота вращения и способность обеспечивать постоянство мощности в широком диапазоне частоты вращения, имея при этом высокий коэффициент полезного действия. Широкое внедрение IGBT–транзисторов и современных микроконтроллеров позволяет создавать относительно недорогие силовые преобразователи (ШИМ – инверторы) требуемой мощности и формировать характеристики электропривода, отличающиеся большой гибкостью и высокой эффективностью.
Фирмой «ЭлКоН» было принято решение разработать вентильно – индукторный электропривод с питанием от аккумуляторной батареи для электротележки грузоподъемностью 2 тонны. Разработка предполагает двоякое назначение: замену морально устаревшего релейно-контакторного привода тележки с двигателем постоянного тока и проведение широких исследований тягового электропривода с ВИД, имея в виду перспективу его внедрения на городском электротранспорте (в первую очередь для троллейбусов).
В содружестве с лабораторией “Motorola” Новосибирского Технического университета разработан вентильно – индукторный привод мощностью 5,5 кВт. Электропривод включает в себя ВИД с датчиками положения, микропроцессорную систему управления и ШИМ-инвертор.
ВИД имеет следующие технические данные:
| Мощность | 5,5 кВт |
| Напряжение питания | 80 В |
| номинальная частота вращения | 1500 об/мин (реверсивная) |
| число фаз статора | 3 |
| соотношение чисел полюсов статора и ротора | 12 / 8 |
| к.п.д. | 0,9 |
|
|
Изготовлен макетный образец вентильно-индукторного электропривода. Силовая часть ШИМ-инвертора выполнена на IGBT-модулях с номинальным током 200 А и напряжением 600 В.
|
|
|
| Вентильно-индукторный двигатель | Силовая часть ШИМ-инвертора |
Система управления электроприводом, выполненная на базе микроконтроллера Motorola, реализует регулирование частоты вращения двигателя, регулирование тока в фазах двигателя и управление углами включения и выключения импульсов тока в фазах двигателя. На выходе микроконтроллер формирует импульсы для управления модулями силовой части инвертора.
Импульсы управления от микроконтроллера усиливаются и формируются для управления модулями силовой части ШИМ-инвертора драйверами International Rectifier. Конструктивно система управления выполнена в виде двух печатных плат.
|
Плата драйверов |
 |
Плата контроллера |
Система управления электропривода
Управление движением тележки в эксплуатации осуществляется с помощью 10-тиступенчатого ножного задатчика, по форме унифицированного с существующей педалью управления и двухпозиционным переключателем направления движения.
Во время наладки, испытаний и исследований управление электроприводом и корректировка его параметров осуществляется с помощью персонального компьютера, на экран которого могут быть выведены все контролируемые и корректируемые параметры системы управления инвертором и системы регулирования приводом.
Макетный образец привода прошел стендовые испытания. Результаты испытаний показали вполне удовлетворительное соответствие расчетных и опытных показателей двигателя, исполнение приводом всех заложенных в него функций: разгон двигателя до заданной частоты вращения с заданным темпом, переход с одной скоростной характеристики на другую, торможение с рекуперацией энергии, реверсирование.
Результаты испытаний электропривода с ВИД показывают хорошее совпадение заданных и реализованных параметров электропривода, что подтверждает корректность разработанной системы автоматизированного проектирования электропривода.
Изготовлен опытный образец вентильно – индукторного привода той же мощности, предназначенный для установки на электротележку. В нем применены комплектующие тех же типов, что и в макетном образце и используются силовые модули отечественного производства.
Следует отметить, что установленная мощность разработанного преобразователя значительно (в 5-6 раз) больше номинальной мощности привода электротележки, так как все комплектующие преобразователя позволяют поднять питающее напряжения до 400-500 В и таким образом увеличить выходную мощность.
www.pifelkon.narod.ru
| Посмотреть изделия спроектированные и изготовленные в ФГУП НИИАЭ>>
Индукторные машины известны с середины 19 века. Из большого разнообразия индукторных машин в настоящее время наибольшее распространение получили вентильные индукторные машины с самоподмагничиванием, называемые в иностранной технической литературе SRM (switched reluctance motors - моторы с переключаемым магнитным сопротивлением). Кроме того, до настоящего времени определённое применение имеют машины с аксиальным возбуждением, прежде всего, как генераторы, в станочных приводах и приводах роботов применяются реактивные двигатели. Вентильные индукторные машины с самоподмагничиванием получили наибольшее распространение благодаря простоте конструкции – ротор из шихтованного электротехнического железа имеет явно выраженные зубцы (Рис. 1), статор выполнен в виде пакета электротехнического железа и имеет явно выраженные полюсные выступы, вокруг которых уложены катушки (рис.2).  Число зубцов ротора Z2 и полюсных выступов (зубцов) статора Z1 и их форма выбираются таким образом, что магнитная проводимость под полюсными выступами меняется при повороте ротора, последовательно для катушек разных фаз. При запитывании катушек током зубцы ротора выстраиваются напротив зубцов (полюсных выступов) статора, в которых протекает ток, при переключении токов с одной фазы на другую ротор поворачивается. При непрерывной коммутации фаз ротор вращается с частотой, в Z2 раза медленнее частоты изменения тока. Возможна работа как в синхронном режиме, так и в режиме бесконтактного двигателя постоянного тока, энергетические показатели во втором случае выше. Известными преимуществами индукторных двигателей (ИД) перед асинхронными и синхронными машинами, предназначенными для работы в составе регулируемого электропривода, являются их более высокая надежность, простота и технологичность конструкции, повышенный КПД и лучшие массо-габаритные показатели, более низкая стоимость в серийном производстве. К недостаткам этих двигателей обычно относят повышенный шум и вибрация двигателя, но существуют способы их уменьшения. ВИМС может эффективно применяться в тех случаях, где его преимущества относительно более распространенных приводов с асинхронным двигателем (АД) и синхронным двигателем (СД), оказываются наиболее заметными, а именно:
Этот список может быть значительно расширен. Электроприводы с ВИМС выполняются до 5 мВт, с максимальным моментом до 100 кНм, максимальной скоростью до 150000 об/мин, минимальной скоростью 1об/сутки. Наша организация разработала ВИМС оригинальной конструкции, для которых разработаны оригинальные алгоритмы управления, позволяющие максимально использовать преимущества данных машин. Были изготовлены и испытаны привода различного назначения. Посмотреть изделия спроектированные и изготовленные в ФГУП НИИАЭ>> |
www.niiae.ru