Cтраница 1
Буровой двигатель используется на буровой крайне неэффективно. В связи с этим понятно стремление буровиков подобрать такой талевой механизм, который бы требовал меньшей мощности. Первая цифра означает число роликов талевого блока, а вторая - число роликов кронблока, входящих в одну и ту же систему оснастки. [1]
Буровой двигатель ДШОТ2 - 195 ( рис. 3.34) состоит из рабочей пары отечественного или импортного производства винтового двигателя диаметром 195 мм и шпинделя-отклонителя ШОТ2 - 195 с жестким искривленным переводником, угол которого может быть от 0 до 3 и определяется заказчиком. [3]
Буровой двигатель должен обладать способностью мгновенного изменения направления вращения, называемого реверсом. Это свойство двигателя особенно важно при подъемных операциях для свинчивания и развинчивания колонны бурильных или обсадных труб. Мгновенное изменение направления вращения двигателя часто приходится производить под полной нагрузкой. Поэтому для облегчения реверса вес вращающихся частей двигателя не должен быть очень большим, так как в противном случае вследствие силы инерции реверс будет затруднен. [4]
Забойные буровые двигатели - приводы, сообщающие вращение долоту и сочленяемые с ним. В настоящее время применяются механические, электрические, гидравлические ( винтовые, турбинные) приводы долота. [5]
Погружной буровой двигатель ( например турбобур) опускают в скважину на трубах. По трубам подается жидкость ( вода или глинистый раствор), которая приводит в действие забойный двигатель, последний передает крутящий момент колонковому набору или долоту. Затем жидкость омывает забой и выносит разрушенную породу на поверхность земли. Колонна труб не вращается - это вращательное бурение с помощью забойного двигателя - турбобура ( турбинное бурение) или электробура ( электробурение. [6]
Первая конструкция объемного бурового двигателя была предложена Г. А. Любимовым еще в 1932 г. Однако ни эта машина, ни последующие успеха не имели, пока в 1962 г., после 12 лет работы, американская фирма Смит не выпустила винтовой двигатель под названием Дайна-дрилл, представляющий обращенный одновинтовой насос, изобретенный французским инженером Муано в 1936 г. Двигатель Дайна-дрилл довольно широко применяется в США в наклонном бурении. Однако характеристика этой машины несущественно отличается от характеристик современных турбобуров, ее преимущества определяются меньшими осевыми габаритными размерами и экономичностью в эксплуатации. [7]
При турбинном бурении буровой двигатель ( турбобур) опускается в скважину и крепится непосредственно над долотом на бурильных трубах. Под действием промывочного раствора, который под большим давлением подается по бурильным трубам, турбобур вращается. В процессе бурения бурильные трубы неподвижны, вращаются только вал тур бобура и долото. У промывочного раствора появляется дополнительная и очень важная функция - носителя энергии. [8]
БАР применяется для поддержания тока бурового двигателя ( при бурении электробуром), для поддержания заданного значения нагрузки на долото ( при турбинном п роторном бурении) и для ручного управления скоростью подачи бурильного инструмента. [9]
Турбинное бурение отличается от роторного тем, что буровой двигатель - турбобур - опускают в скважину и крепят непосредтвенно над долотом. В процессе бурения бурильные трубы остаются неподвижными, вращаются только вал турбобура и долото. [10]
Турбинное бурение отличается от роторного тем, что буровой двигатель ( турбобур) опускают в скважину и крепят непосредственно над долотом. В процессе бурения бурильные трубы остаются неподвижными, вращаются только вал турбобура и долото. [12]
Турбинное бурение отличается от роторного тем, что буровой двигатель ( турбобур) опускают в скважину и крепят непосредственно над долотом. В процессе бурения бурильные трубы остаются неподвижными, вращаются только вал турбобура и долото. [13]
Долото Д при помощи роторного стола PC вращается буровым двигателем ДБ. [14]
Таким образом, если давление на забой или мощность бурового двигателя ДБ и, следовательно, вращающий момент на долоте выше заранее установленных величии, то подача долота прекращается. [15]
Страницы: 1 2 3
www.ngpedia.ru
Забойные двигатели для бурения скважин представляют собой погружное устройство, которое преобразует электрическую энергию, гидравлические или пневматические усилия, производимые буровой установкой, расположенной на поверхности, в движение бурового долота для разрушения буримой породы в забое скважины. Энергия, необходимая для приведения в движение породоразрушающего инструмента, передается к нему по колонне бурильных труб или с использованием специального кабеля и преобразуется непосредственно самим устройством в механические движения.
Использование забойного двигателя для бурения скважин позволяет увеличить скорость бурения, снизить энергозатраты и риски аварийных ситуаций, если сравнивать данную конструкцию с ротором. Кроме того, забойные двигатели продемонстрировали высокую эффективность при создании скважин с заданным отклонением по вертикали.
 Забойные двигатели, используемые при проведении буровых работ, делятся на категории по ряду критериев. В зависимости от типа движения, которое передается породоразрушающему элементу, забойные двигатели делятся на устройства ударного и вращательного действия. Энергия, передаваемая от буровой установки к забойному двигателю, может быть как электрической, так и передаваться гидравлическими или пневматическими системами, а в зависимости от целей забойные двигатели для бурения скважин могут быть колонковыми или использоваться для проведения работ по бурению сплошным забоем. В данном случае перечислены лишь основные параметры классификации данных устройств, наибольшими отличиями среди классификационных признаков характеризуется разделение забойных двигателей по типу совершаемых движений для воздействия на породу (ударов или вращения).
Забойные двигатели, используемые при проведении буровых работ, делятся на категории по ряду критериев. В зависимости от типа движения, которое передается породоразрушающему элементу, забойные двигатели делятся на устройства ударного и вращательного действия. Энергия, передаваемая от буровой установки к забойному двигателю, может быть как электрической, так и передаваться гидравлическими или пневматическими системами, а в зависимости от целей забойные двигатели для бурения скважин могут быть колонковыми или использоваться для проведения работ по бурению сплошным забоем. В данном случае перечислены лишь основные параметры классификации данных устройств, наибольшими отличиями среди классификационных признаков характеризуется разделение забойных двигателей по типу совершаемых движений для воздействия на породу (ударов или вращения).
Первый вид используется в основном при бурении скважин небольшого диаметра на глубину не превышающую 1 500 метров. Забойный двигатель для бурения скважин ударного типа сообщает породоразрушающему инструменту возвратно-поступательные движения с помощью поршня-молотка, приводимого в действие путем перепуска газа или гидравлической жидкости (в зависимости от этого рабочий орган именуется пневмодарником или гидроударником). При производстве забойных двигателей их конструкция может быть спроектирована таким образом, чтобы передаваемое усилие сообщалось рабочему органу только для осуществления поступательного движения, исключительно для его возврата в исходное положение (то есть прямого и обратного хода соответственно), а также для осуществления обоих движений.
Забойные двигатели, передающие долоту движение вращения, нашли особенно широкое применение в сфере бурения скважин для добычи нефти и газа.
Конструкция данного типа забойного двигателя подразумевает наличие фиксированного в корпусе устройства статора и закрепленного на валу ротора, при этом первый соединен с колонной труб, а второй связан с породоразрушающим элементом. Создаваемый двигателем активный момент обеспечивает движение долота для разрушения породы, а обратно направленный реактивный момент с таким же показателем усилия гасится в стенках скважины и на приводах установки на поверхности.
rosprombur.ru
Cтраница 3
При использовании автоматических регуляторов долото подается на забой автоматически, в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока бурового двигателя. Существует несколько десятков различных конструкций автоматических регуляторов подачи долота. [31]
На выбор скорости вращения инструмента наибольшее влияние оказывают твердость, трещнноватость и абразивность породы, тип бурового наконечника и его диаметр, глубина скважины, мощность бурового двигателя, кинематическая характеристика буровой установки. [32]
Автоматизация и механизация буровых работ, помимо того, что они являются основными путями облегчения труда и повышения безопасности, приобретают особое значение в связи с увеличением глубин, роста мощностей буровых двигателей и внедрением форсированных режимов бурения. [33]
При бурении двигатель должен обладать пусковым моментом больше нормального, так как при подъемных операциях его приходится пускать, имея подвешенную на талях колонну бурильных или обсадных труб. Повышенный пусковой момент бурового двигателя требуется при подъеме колонны обсадных труб. Вполне понятно, что инерционная нагрузка от двигателя в этих случаях может достигнуть значения, в несколько раз превышающего нормальную нагрузку. [34]
Мачта имеет два специальных блочка для нажимного приспособления при работе с квадратной штангой. Подъем и спуск мачты производятся при помощи ручной лебедки или бурового двигателя. Наверху мачты укреплен трехроликовын кронблок, а на обоих нижних концах имеются ручные винтовые домкраты, употребляемые для установки мачты в рабочем положении ( описание установки ПСКА-ЗООсм. [35]
Исследования работы шарошечных долот показывают, что, с точки зрения повышения долговечности породоразрушающих инструментов, наиболее благоприятным является силовой режим, при котором осевые нагрузки поддерживаются максимально допустимыми, а частота вращения долота выбирается в пределах 50 - 200 об / мин. Осуществление такого режима работы долота возможно при использовании в качестве забойного бурового двигателя винтовых машин объемного принципа действия. [36]
В экспозициях Политехнического музея представлены многие уникальные свидетельства истории нефтяного промысла. Шумилова ( 1940 - е гг.), являются первыми пред-ставителями отечественных буровых двигателей, за которыми последовала революция s технологиях глубокого бурения. Многие экспонаты признаны па - - мятниками науки и техники 1 ранга. [37]
Губкина усовершенствовали УПД Грицая - Оловянова, введя автоматическое управление краном в зависимости от нагрузки бурового двигателя. [39]
Автоматизация и механизация буровых работ, являясь основным путем к облегчению труда и увеличению безопасности, приобретает особое значение в связи с увеличением глубин, мощностей буровых двигателей и внедрением форсированных режимов бурения. [40]
Устройства подачи долота, где в качестве исполнительных двигателей используются электрические машины постоянного и переменного тока, а также электромагнитные муфты, получили наибольшее распространение. Одним из наиболее ранних устройств этого типа является автомат М. М. Скворцова, первая конструкция которого появилась на нефтяных промыслах в 1925 г. В усовершенствованном виде этот автомат начал использоваться в 1929 г. Автомат осуществлял автоматическую подачу долота в функции тока нагрузки бурового двигателя. [41]
Страницы: 1 2 3
www.ngpedia.ru
TDS-11SA
Буровая Система
Верхнего Привода
Общее Описание
Общее Описание
Предисловие/Условные обозначения в руководстве
Информация по мерам безопасности..........................................…… 1-5
Обозначение направления………. ................................................……. 1-6
Расположение материала ...............................................................……. 1-6
Раздел 1 Общий Обзор
Введение ..................................................................…………………… 1-7
Раздел 2 Описание основных узлов
Введение………………… .................................................................... 1-9
Буровые двигатели переменного тока.......................................…….. 1-9
Система охлаждения двигателей...............................................…….. 1-12
Узел трансмиссии/ двигателя (основной корпус) и вертлюга.....… 1-14
Система противовеса ................................................………………… 1-16
Каретка и направляющий рельс ................................................ …… 1-18
Гидравлическая система управления ........................................ ……. 1-20
Трубный манипулятор PH-55 .................................................... …….. 1-23
Вращающийся адаптер штроп ............................................... …….. 1-24
Предохранительный зажим крутящего момента ....................……… 1-26
Система двустороннего наклона штроп...................................……… 1-27
Встроенный противовыбросовый клапан (IBOP) ................……… 1-28
Элеватор бурильный труб ..................................................………….. 1-28
Панель бурильщика ....................................................……………….. 1-30
Круглый переключатель............................................................………. 1-30
Потенциометр ограничения крутящего момента ..................………. 1-30
Потенциометр ограничения крутящего момента при свинчивании…. 1-31
Переключатели и кнопки управления ......................................………. 1-31
Световые индикаторные устройства. ...........................................……. 1-31
Контуры питания ........................................................……………….. 1-32
Инвертор переменной частоты (VFI) .......................…………. ……. 1-33
Выпрямитель /емкостное сопротивление....................... ………..……. 1-34
Силовые блоки ........................................................ ……………… 1-34
Секции управления ....................................................………… …….. 1-34
Раздел 3 Технические характеристики
Буровые двигатели переменного тока .......................………………. 1-35
Инвертор переменной частоты (VFI)……… ..........................……… 1-35
Тормозная система двигателей.................................................……… 1-35
Система охлаждения двигателей ............................................……… 1-36
Коробка передач…….................................................................……… 1-36
Смазка коробки передач……… ...............................................……… 1-36
Гидравлическая система ……..................................................... …….. 1-37
Технические характеристики системы....................................……….. 1-37
Чертежи и схемы .....................................................................………… 1-38
ПредисловиеУсловные обозначения в руководстве
Информация по мерам безопасности
Информация, касающаяся возможного травматизма персонала буровой бригады и повреждений оборудования, появляется на страницах данного руководства. Она выделена таким образом, чтобы привлечь внимание читателя к важной информации, предупреждению или примечанию. Примеры приводятся ниже. Просьба с особым вниманием подходить к важным сообщениям такого рода.
| ● | Обозначает рекомендацию относительно правил эксплуатации или обслуживания, не несущих опасности травм персонала или ущерба оборудования. |
| ▲ | Обозначает рекомендацию, относящуюся к возможному повреждению оборудования. |
| u | Обозначает рекомендацию, относящуюся к существующей возможности получения травм персоналом буровой бригады. |
Для предотвращения травм персонала и повреждения оборудования необходимо ознакомиться с настоящим руководством, а также с соответствующими материалами, перед началом работ по эксплуатации, осмотру и обслуживанию оборудования.
Обозначение направления
Ссылки на левую, правую или заднюю стороны узлов TDS-11SA, встречающиеся на страницах данного руководства, предполагают, что читающий находится позади буровой системы верхнего привода, которая в свою очередь обращена в сторону центра скважины.
Расположение материала
В настоящей папке содержится несколько раздельных частей, каждая из которых может быть отделена для удобства чтения.
Раздел 1
Общий Обзор
Введение
В настоящей части руководства содержится описание и теория работы основных узлов, составляющих Буровую Систему Верхнего Привода TDS-11SA.
Система TDS-11SA является высокомобильной и компактной верхнеприводной буровой системой. Бурение производится с помощью двух буровых двигателей переменного тока переменной частоты мощностью 350 или 400 лошадиных сил. Встроенная гидравлическая система обеспечивает питание всех вспомогательных функций, снимая необходимость установки отдельного гидравлического силового блока и подводки линий подач гидравлической жидкости.
На Рисунке 1-1 на следующей странице показано девять основных узлов, составляющих систему TDS-11SA.
Рис.1-1. Система TDS-11SA в стандартном исполнении
| AС Drilling Motors | Буровые двигатели сети переменного тока |
| Counterbalance System | Система противовеса |
| Bail | Серьга |
| Gooseneck (S- pipe) | S-образная труба |
| Bonnet | Крышка |
| Washpipe Packing Assembly | Уплотнительный узел грязевой трубы |
| Transmission/Motor Housing and Swivel Assy. | Корпус трансмиссии/двигателя и вертлюг в сборе |
| Carriage and Guide Beam | Каретка и направляющий рельс |
| Pipehandler | Трубный манипулятор |
 Раздел 2 Описание основных узлов
Раздел 2 Описание основных узлов
Введение
Ниже приводится описание узлов и компонентов системы TDS-11SA, и определяются термины, применяемые в настоящем руководстве.
Буровые двигатели переменного тока
В системе TDS-11SA используется два двигателя сети переменного тока мощностью 350 или 400 л.с. Двигатели устанавливаются вертикально, бок о бок, на основной корпус(Рис.1-2).
Рис.1-. Буровой двигатель сети переменного тока
Main Body Основной корпус
350 hp AC Drilling Motor Буровой двигатель сети переменного тока мощностью 350 л.с.
 Крепление двигателей к основному корпусу производится при помощи модифицированного D-образного крепления. Такой способ монтажа позволяет осуществлять монтаж двигателей без клиньев или специальной центровки. Вал каждого двигателя оканчивается зубчатой передачей на нижнем торце, и тормозным диском на верхнем торце. Два тормозных диска гидравлического действия, установленных в верхней части каждого двигателя, удерживают крутящий момент в бурильной свече, а также участвуют в позиционировании свечи при горизонтальном бурении (Рис.1-3). Управление тормозными дисками осуществляется дистанционно, при помощи электромагнитного клапана.
Крепление двигателей к основному корпусу производится при помощи модифицированного D-образного крепления. Такой способ монтажа позволяет осуществлять монтаж двигателей без клиньев или специальной центровки. Вал каждого двигателя оканчивается зубчатой передачей на нижнем торце, и тормозным диском на верхнем торце. Два тормозных диска гидравлического действия, установленных в верхней части каждого двигателя, удерживают крутящий момент в бурильной свече, а также участвуют в позиционировании свечи при горизонтальном бурении (Рис.1-3). Управление тормозными дисками осуществляется дистанционно, при помощи электромагнитного клапана.
Буровые двигатели переменного тока являются двигателями открытого типа. Это означает, что воздух, охлаждающий двигатель, проходит сквозь него. Двигатели, изготавливаемые специально для применения в буровых системах верхнего привода, имеют встроенные датчики температуры, обмотку специальной пропитки, высокопрочные подшипники, а также валы с коническими выходами, позволяющими облегчить обслуживание систем передачи и торможения.
Рис. 1-3. Тормозная система буровых двигателей
Calipers and Shoes Башмаки
Brake Disc Тормозной диск
 Система охлаждения двигателей
Система охлаждения двигателей
Система охлаждения двигателей в TDS-11SA представляет собой вентиляторную систему нагнетательного типа. Она состоит из двух моторов сети переменного тока мощностью 5 л.с., каждый из которых установлен сверху одного бурового двигателя (Рис. 1-4). Воздух поступает через воздухозаборное устройство, являющееся одновременно кожухом тормоза, затем он проходит по жесткому трубопроводу и поступает в каждый двигатель. После прохождения через внутренне пространство бурового двигателя, воздух выходит через louver отверстие, расположенное в днище двигателей.
Рис.1-4. Система охлаждения двигателей
5 HP AC Blower Motors Двигатели вентилятора, мощность 5 л.с.
Louvers Вытяжные отверстия
AC Drilling Motor Буровой двигатоель сети переменного тока
Air Flow Duct Возбуховод
Centrifugal Blower Вентилятор центробежного типа
(2 Places) (в двух местах)
Disk Brake Housing Кожух тормозного диска
Intake Air Flow Воздухозаборное устройство
(Between Motor and Brake Housing) (Между двигателем и кожухом тормоза)
Exhaust Air Flow Вытяжное устройство

megaobuchalka.ru
Cтраница 2
При ручной подаче бурильщик, руководствуясь показаниями приборов ( амперметра в цепи статора бурового двигателя и индикатора веса), периодически растормаживает барабан лебедки, что приводит к подаче долота. Таким способом весьма трудно осуществить плавную и равномерную подачу долота, что нередко приводит к осложнениям и снижению качественных и количественных показателей бурения. Автоматизация во многом устраняет эти недостатки. [16]
При ручной подаче бурильщик, руководствуясь показаниями приборов ( амперметра в цепи статора бурового двигателя и индикатора веса), периодически растормаживает барабан лебедки, что приводит к подаче долота. Таким способом весьма трудно осуществить плавную и равномерную подачу долота. Автоматизация во многом устраняет эти недостатки. [17]
При ручной подаче бурильщик, руководствуясь показаниями приборов ( амперметра в цепи статора бурового двигателя и индикатора веса), периодически растормаживает барабан лебедки, что приводит к подаче долота. Таким способом весьма трудно осуществить плавную и равномерную подачу долота, что нередко приводит к осложнениям и снижению качественных и количественных показателей бурения. Автоматизация во многом устраняет эти недостатки. [18]
При ручной подаче бурильщик, руководствуясь показаниями фиборов ( амперметра в цепи статора бурового двигателя или шдикатора веса), периодически растормаживает барабан ле - 5едки, что приводит к подаче долота. Таким способом весьма трудно осуществить плавную и равномерную подачу долота. [19]
При ручной подаче бурильщик, руководствуясь показаниями приборов ( амперметра в цепи статора бурового двигателя и индикатора веса), периодически растормаживает барабан лебедки, что ведет к подаче долота. Таким способом весьма трудно осуществить плавную и равномерную подачу долота. Автоматизация во многом устраняет эти недостатки. [20]
УПД Грицая - Оловянова, введя автоматическое управление краном в зависимости от нагрузки бурового двигателя. Дальнейшее усовершенствование гидравлических УПД было сделано С. Б. Годжаевым, который применил автоматическое управление проходным сечением для жидкости, перетекающей из одной полости цилиндра в другую, в функции осевого давления на долото. [22]
И все же, несмотря на неудачу, стало очевидным, что вполне возможно перенести буровой двигатель с поверхности земли на забой. [23]
Знать, при каком виде разрушения проходятся отложения, необходимо для правильной оценки условий работы долот и буровых двигателей, разработки режимов бурения, выявления потенциальных возможностей технической вооруженности буровых установок и определения путей дальнейшего совершенствования технологии бурения. Для этого, очевидно, нужны данные о физико-механических свойствах пород, слагающих разрез данной площади, и критерии, при помощи которых можно было бы сравнительно легко устанавливать вид разрушения. [24]
При роторном бурении с автоматом достигаются равномерная подача бурильного инструмента на забой и автоматический подъем инструмента при перегрузках буровых двигателей. [25]
При использовании автоматических регуляторов долото по-гается на забой автоматически в зависимости от параметров, сарактеризующих режим бурения, например давления-аа забой 1ли тока бурового двигателя. В настоящее время существует несколько десятков различных конструкций автоматических ре - уляторое подачи долота. Наземные автоматические регуляторы подачи по конструктивному признаку силового узла можно разделить на электромашинные, гидравлические и фрикци-шные. Применение наземных автоматических регуляторов подачи долота по сравнению с ручной подачей обеспечивает увеличение механической скорости бурения и проходки на долото на 5 - 15 %, что окупает затраты на их изготовление и обслуживание. [26]
При использовании автоматических регуляторов долото подается на забой автоматически в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока бурового двигателя. В настоящее время существует несколько десятков различных конструкций автоматических регуляторов подачи долота. Наземные автоматические регуляторы подачи по конструктивному признаку силового узла можно разделить на электромашинные, гидравлические и фрикционные. Применение наземных автоматических регуляторов подачи долота по сравнению с ручной подачей обеспечивает увеличение механической скорости бурения и проходки на долото на 5 - 15 %, что окупает затраты на их изготовление и обслуживание. [27]
При использовании автоматических регуляторов долото подается на забой автоматически в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока статора бурового двигателя. [28]
При использовании автоматических регуляторов долото подается на забой автоматически, в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока бурового двигателя. В настоящее время существует несколько десятков различных конструкций автоматических регуляторов подачи долота. Наземные автоматические регуляторы подачи по конструктивному признаку силового узла можно разделить на электромашинные, гидравлические и фрикционные. Применение наземных автоматических регуляторов подачи долота по сравнению с ручной подачей обеспечивает увеличение механической скорости бурения и проходки на долото на 5 - 15 %, что полностью окупает затраты на их изготовление и обслуживание. [29]
При использовании автоматических регуляторов долото подается на забой автоматически, в зависимости от параметров, характеризующих режим бурения, например давления на забой или тока бурового двигателя. В настоящее время существует несколько десятков различных конструкций автоматических регуляторов подачи долота. Наземные автоматические регуляторы подачи по конструктивному признаку силового узла можно разделить на электромашинные, гидравлические и фрикционные. [30]
Страницы: 1 2 3
www.ngpedia.ru

Правильный выбор мотор-редуктора для малогабаритной буровой установки - залог успешного бурения скважин на воду. Прежде чем приобретать тот или иной вращатель, нужно определиться с методом бурения, а также применяемым буровым инструментом. От этого зависит какая нужна будет мощность (крутящий момент) и какие потребуются обороты на валу вращателя.
К примеру, характеристики установки разведывательного бурения УРБ 2А2 на базе ЗИЛ-130 которая позволяет бурить любые скважины на воду следующие - 20-300 об/минуту на вращателе и крутящий момент 3500 н.м. для бурения сухим способом - шнеками D135 на глубину 30-40 метров необходим крутящий момент 2500-3500 Н.м. и обороты около 100 об/мин. выдать такие характеристики можно только с помощью привода в виде автотракторного палубного дизеля мощностью 50-80 Квт. поэтому бурение шнеками и малогабаритная буровая установка малосовместимы.
Чаще всего бурение на МГБУ выполняется методом прямой промывки, т.е. подачи бурового раствора к рабочему инструменту - шарошечному долоту или пикобуру. Для такого метода бурения нужна гораздо меньшая мощность так как инструмент работает только на забое, пятно контакта а следовательно и усилия невелики, а вынос породы происходит за счет работы бурового насоса. Крутящий момент необходимый для такого метода составляет примерно 250-500 Нм, такой момент можно получить с простого электрического мотор-редуктора мощностью 2-3 кВт.
Теоретически можно конечно увеличить мощность до 6-7 квт но тогда необходимо менять конструкцию каркаса установки, делать делать его в виде стрелы или П-образным с раскосами жесткости. Обороты вращателя для работы на работы на малогабаритных установках как правило находятся в диапазоне 50-90 об/минуту. Это связано с тем что шаткость конструкции и малая точность изготовления вращающихся деталей на больших оборотах может вызвать сильную вибрацию и биение колонны буровых штанг и обрыв соединений. Для бурения мягких пород до 4-й категории буримости (глины, супеси, пески) таких оборотов и крутящего момента вполне достаточно.
Естественно что разработкой мотор-редукторов именно для малогабаритных установок никто специально не занимался. Чаще всего просто применяют стандартные двигатели от агрегатов используемых в сельском хозяйстве и промышленности. Три основных редуктора которые устанавливают на МГБУ это редуктор ТСН 00.76 от привода наклонного транспортера навозоуборочного комплекса, или общепромышленные редуктора 3МП-40 или 3МП-50. приводом для этих редукторов является фланцевый асинхронный электродвигатель трехфазного тока мощностью 2.2 кВт и выдающий 1500 оборотов в минуту.

Этот мотор-редуктор в просторечии именуемый "навозник" является самым оптимальным и популярным вращателем для малогабаритных буровых установок. Его преимущества - надежность и простота конструкции, легкодоступность (продается в любом крупном агромаше) и ремонтопригодность, запчасти есть в том же агромаше почти всегда в наличии. Минусом является большой вес (95 кг), хотя иногда это является преимуществом - обеспечивается дополнительное давление на буровой инструмент и сравнительно малое количество оборотов на валу - 56 об/минуту.

Редукторы 3МП-40 и 3МП-50 являются близнецами, их разница только в крутящем моменте на валу. Они выдают порядка 80 об/минуту, но их конструкция более сложна чем у ТСН, это планетарные редуктора с сателитными шестернями как в мостах автомобилей. Они выпускаются в двух видах - для горизонтальной схемы установки - на лапах и для вертикальной с фланцевым соединением. Данные редуктора весят немного меньше чем ТСН и лучше подходят для установки на переносную МГБУ. Но как правило в большинстве фирм торгующих промышленным оборудованием такой редуктор и запчасти к нему заказная позиция со сроком поставки около месяца.
Цена эти редуктоов на 15-20% дороже чем ТСН.
burenie-voda72.ru
Винтовой двигатель предназначен для бурения скважин долотами диаметром 215,9 – 244,5 мм при забойной температуре не свыше 1200С. По сравнению с другими гидравлическими забойными двигателями винтовой имеет преимущества:
По принципу действия винтовой двигатель представляет собой планетарно-роторную гидравлическую машину объемного типа с косозубым зацеплением.
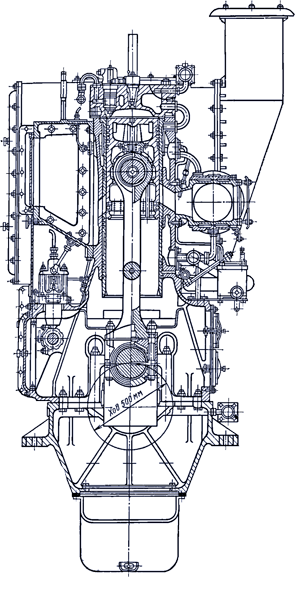
 Двигатель состоит из вращающегося ротора и неподвижного статора. Стальной статор внутри имеет привулканизированную резиновую обкладку с винтовыми зубьями левого направления. На стальном роторе нарезаны наружные винтовые зубья также левого направления. Число зубьев ротора на 1единицу меньше числа зубьев статора. Ось ротора смещена относительно оси статора на величину эксцентриситета, равного половине высоты зуба (рисунок 44). Шаги винтовых линий ротора и статора прямо пропорциональны числу зубьев. Зубья ротора и статора, соприкасаясь, образуют рабочие камеры.
Двигатель состоит из вращающегося ротора и неподвижного статора. Стальной статор внутри имеет привулканизированную резиновую обкладку с винтовыми зубьями левого направления. На стальном роторе нарезаны наружные винтовые зубья также левого направления. Число зубьев ротора на 1единицу меньше числа зубьев статора. Ось ротора смещена относительно оси статора на величину эксцентриситета, равного половине высоты зуба (рисунок 44). Шаги винтовых линий ротора и статора прямо пропорциональны числу зубьев. Зубья ротора и статора, соприкасаясь, образуют рабочие камеры.
Рисунок 44. Поперечное сечение рабочих органов
винтового забойного двигателя
1 – статор,
2 - ротор
Буровой раствор под давлением проходит через двигатель, при этом ротор вращается относительно статора по часовой стрелке. За счет разницы в числах зубьев ротора и статора обеспечивается пониженная частота вращения и высокий крутящий момент на выходе
Наивысшие показатели бурения винтовым двигателем достигаются в сочетании с низкооборотными долотами, а также с гидромониторными. Вооружение долота выбирают в зависимости от твердости породы.
Винтовые двигатели обладают большей моментностью, чем турбобуры. Под моментностью двигателя понимают вращающий момент, развиваемый двигателем, отнесенный к его длине и диаметру:
 ,(30)
,(30)
где М- вращающий момент двигателя,
L – длина двигателя,
D – диаметр двигателя.
Благодаря этому винтовые двигатели можно конструировать меньшего диаметра по сравнению с турбобурами. Винтовые двигатели обладают большей, чем у турбобуров, удельной мощностью – это эффективная мощность, отнесенная к единице массы двигателя.
При спуске двигателя в скважину за 10-15 м до забоя следует включить буровой насос, при этом двигатель начинает работать. Незапуск двигателя фиксируется по резкому подъему давления в нагнетательной линии насосов. В таком случае двигатель нужно запускать с вращением бурильной колонны ротором при одновременном прокачивании раствора. Запуск двигателя ударами о забой не допускается.
Во избежание левого вращения инструмента под действием реактивного момента двигателя ведущую трубу фиксируют от проворачивания в роторе с помощью клиньев.
По своим энергетическим характеристикам винтовые двигатели позволяют создавать на долоте высокие осевые нагрузки: Д-195 до 250-300 кН; Д-85 до 30кН.
Наивысшие показатели бурения винтовым двигателем достигаются в сочетании с низкооборотными долотами, а также с гидромониторными. Вооружение долота выбирают в зависимости от твердости породы.
При бурении винтовым двигателем инструмент необходимо подавать плавно, без рывков. Периодически инструмент следует проворачивать. Расход промывочной жидкости следует выбирать исходя из условий необходимой очистки забоя. По мере износа рабочей пары расход промывочной жидкости необходимо увеличить на 20-25% от первоначальной величины для сохранения рабочей характеристики (рисунок 45).
При постоянном расходе жидкости двигатель характеризуется изменением вращающего момента М от перепада давления, частоты вращения, мощности и КПД.

Наибольшая частота вращения соответствует режиму холостого хода, а максимальный вращающий момент – режиму торможения при частоте вращения равной нулю. При увеличении момента торможения перепад давления возрастает, одновременно повышается мощность и КПД.
Режим максимальной мощности называется эффективным, а наивысшего КПД – оптимальным.Зона устойчивой работы двигателя находится между этими режимами при частоте вращения 50-100 об/мин. При достижении предельного момента торможения вал двигателя останавливается, а величина давления определяется герметичностью пары ротор-статор.
В рабочей области от режима холостого хода до оптимального частота вращения прямо пропорциональная расходу жидкости, поэтому при изменении расхода жидкости частота определяется по формуле (31):
 , (31)
, (31)
где Q1, Q2 – изменение расхода жидкости, л/с.
Винтовые роторные двигатели имеют ряд преимуществ, что позволило использовать их как гидравлические забойные двигатели:
Условия создания шлюзов в паре ротор – статор объемных винтовых двигателей следующие:
 , (32)
, (32)
 (33)
(33)
Теоретически винтовой двигатель может любые передаточные отношение.
Двигатели с малозаходными винтовыми механизмами развивают большие частоты вращения при небольшом вращающем моменте. По мере увеличения числа заходов ротора вращающий момент увеличивается и снижается частота вращения. Это объясняется тем, что винтовой механизм с многозаходным ротором выполняет роль двигателя и одновременно редуктора, передаточное отношение которого пропорционально числу заходов ротора.
poznayka.org