





Содержание
1. Введение
2. Основная часть
2.1 Характерные особенности бесконтактных двигателей
2.2 Конструкция бесконтактного двигателя
2.3 Схема электромагнитной системы линейного бесконтактного двигателя
3. Заключение
4. Список использованной литературы
5. Приложения
1. Введение
В начале 60-х г. были разработаны первые бесконтактные электродвигатели постоянного тока типа БП-203, БП-251 и БПС-202. В первом космическом скафандре в кислородном нагнетателе был установлен бесконтактный электродвигатель БПК-401.
За прошедшие 40 лет разработаны 4 поколения бесконтактных электродвигателей. Двигатели 4-го поколения серии БК-1 (20 модификаций), БК-2 (6 модификаций) и ДБ (5 модификаций) применяются в приводах вентиляторов и насосов систем жизнеобеспечения, в системах терморегулирования КА и скафандрах космонавтов. Только на орбитальной станции «Мир» установлено более 100 таких электродвигателей.
Для обеспечения большого гарантийного ресурса двигателей в составе КА с длительным сроком активного существования НПП ВНИИЭМ ведет разработку бесконтактных электродвигателей постоянного тока с гидростатическими опорами ротора для насосных агрегатов. НПП ВНИИЭМ также ведет постоянную работу по совершенствованию разработанных изделий, дальнейшему повышению их надежности и долговечности, а также по созданию новых изделий, в наибольшей степени отвечающих требованиям потребителя.
Техническое решение для бесконтактного гидроподвеса вращающегося ротора обеспечивает возможность реализации электрической машины насосного исполнения с практически неограниченным ресурсом, определяемым лишь сроком сохраняемости электротехнических материалов и комплектующих элементов, способных обеспечить гарантийный ресурс двигателя в составе элек-тронасосного агрегата более 100 тыс. часов.
2. Основная часть
2.1 Характерные особенности бесконтактных двигателей
Коллекторные двигатели постоянного тока обладают хорошими регулировочными свойствами и экономичны, но наличие скользящего контакта коллектор – щетки ограничивает область их применения.
В настоящее время в связи с развитием силовой полупроводниковой электроники появились и начали получать все более широкое распространение бесконтактные двигатели постоянного тока. При замене механического коммутатора – коллектора с щетками полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех, особенно при высоких частотах вращения, когда очень быстро изнашиваются щетки и значительно увеличиваются искрение и радиопомехи.
В отличие от обычного коллекторного двигателя бесконтактный двигатель постоянного тока обладает рядом характерных особенностей.
1. Силовая обмотка якоря расположена на статоре и состоит из нескольких катушек, сдвинутых относительно друг друга в пространстве. Ротор выполняют в виде постоянного магнита.
2. Положение оси магнитного потока ротора по отношению к осям катушек силовой обмотки статора определяется бесконтактными датчиками (трансформаторными, индукционными, магнитоэлектрическими, фотоэлектрическими).
3. Бесконтактный полупроводниковый коммутатор осуществляет коммутацию катушек силовой обмотки статора по сигналам датчиков положения. При мощности двигателей до 0,5 – 1 кВт в качестве коммутирующих элементов обычно используются транзисторы, при большей мощности – тиристоры.
Эти факторы позволяют при устранении скользящего контакта коллектор–щетки сохранить основную особенность машины постоянного тока, заключающуюся в том, что частота переключения катушек обмотки якоря определяется частотой вращения ротора. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением.
2.2 Конструкция бесконтактного двигателя
Рассмотрим простейшую конструкцию бесконтактного двигателя (рис.1).
В корпусе 1 расположены электромагнитные системы двигателя и датчика положения. Магнитопровод статора двигателя 2 выполнен из электротехнической стали. В его пазах расположена обмотка 3, состоящая из двух обмоток, сдвинутых в пространстве на 90°. Каждая обмотка представляет собой сосредоточенную многовитковую катушку. Ротор 4 с одной парой полюсов изготовлен из постоянного магнита. При подаче постоянного напряжения на обмотку статора по ней проходит ток, который по взаимодействии с магнитным потоком ротора создает вращающий момент.
Роль датчика положения ротора относительно обмотки статора выполняют два магнитоуправляемых диода Д1 и Д2, расположенных на дополнительном кольцевом магнитопроводе 5, и вращающийся ферромагнитный диск 6. Диск имеет немагнитную вставку 7, занимающую половину его толщины на половине окружности. Магнитный поток датчика Фд создается постоянным магнитом 8 с радиальной намагниченностью. Каждый из магнитоуправляемых диодов одну половину оборота вала находится в зоне действия магнитного потока Фд и открыт, а вторую - вне зоны действия магнитного потока Фд и закрыт.
Работа датчиков и полупроводникового коммутатора К (рис.2) согласована при расположении датчиков Д1 и Д2 по осям обмоток статора 1 и 2 и линии симметрии диска СС перпендикулярно оси полюсов ротора. В положении, изображенном на рис.2, a, сигнал, управляющий коммутатором, снимается с датчика Д1, и коммутатор подает на обмотку 1 напряжение указанной на рисунке полярности.
Когда сигнал отсутствует, коммутатор К подает на обмотку 1 напряжение противоположной полярности (рис. 2, б). Аналогично со сдвигом на 90° подключается к коммутатору обмотка 2 по сигналам датчика Д2. При этом изменение коммутатором полярности напряжения на обмотках статора осуществляется в момент перехода оси потока ротора через ось данной обмотки статора. Тем самым обеспечивается изменение направления тока в обмотке статора при подходе оси полюса ротора противоположного знака. Следовательно, сохраняется одно направление вращающего момента эм, создаваемого силами Fэм, в пределах полного оборота ротора, т.е. выполняется роль коллектора электрической машины постоянного тока.
На рис.3 показана схема подключения обмоток двигателя к транзисторам TI и Т8 коммутатора и таблица, определяющая порядок переключения транзисторов по сигналам датчиков Д1 и Д2.
Известно, что электромагнитный момент, действующий на виток с током, помещенный в магнитное поле, пропорционален току витка и магнитному потоку и зависит от угла между осями витка и поля. Зависимость электромагнитного момента от угла поворота ротора для двухобмоточного двигателя, включенного по схеме рис. 3, показана на рис. 4.
На этом рисунке M1 и M2 – моменты взаимодействия раздельно с 1 и 2 обмотками, M1,2 - результирующий момент.
Как видно из графиков M1 и M2, при включении напряжения только на одну обмотку статора ротор двигателя не приходит во вращение, если начальное положение ротора соответствует углу Θ, при котором вращающий момент эм меньше момента сопротивления на валу. Кроме того, существенная пульсация вращающего момента в пределах оборота ротора приводит, соответственно, к нестабильности мгновенной угловой скорости ротора.
При наличии двух (и более) обмоток на статоре уменьшение момента взаимодействия ротора с одной из обмоток компенсируется увеличением момента взаимодействия с другой. Соответственно, обеспечивается достаточно большой пусковой момент при любом угловом положении ротора, снижение пульсации вращающего момента в пределах оборота и нестабильности мгновенной угловой скорости ротора.
Характеристики бесконтактных микродвигателей тем ближе к характеристикам классического двигателя постоянного тока, чем больше число обмоток на статоре. Однако пропорционально числу обмоток увеличивается необходимое число чувствительных элементов датчиков положения и число транзисторов в коммутаторе. Поэтому практически число обмоток нецелесообразно более трех–четырех.
2.3 Схема электромагнитной системы линейного бесконтактного двигателя
Для повышения стабильности момента и угловой скорости в пределах оборота применяют специальные схемы модуляции тока в обмотках статора.
В настоящее время крупными сериями выпускаются только бесконтактные микродвигатели. Однако наблюдается тенденция роста выпуска бесконтактных двигателей малой мощности, которые могут составить конкуренцию высокомоментным двигателям, используемым в промышленных роботах, приводах подач обрабатывающих центров и т.д. Объясняется это, в частности, тем что сами бесконтактные двигатели имеют меньшие габариты и массу, чем коллекторные, так как у них лучше условия охлаждения – источники тепла только на статоре, и отсутствует такой источник нагрева, как узел трения коллектор–щетки. Правда, бесконтактный двигатель не может работать без полупроводникового коммутатора.
В ряде случаев двигатели постоянного тока целесообразно делать линейными.
На рис.5, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является подвижной частью линейного двигателя. Якорь 3 представляет собой диэлектрическую пластину, на поверхности которой методом фотолитографии выполнена печатная схема проводников 4. Якорь является неподвижной частью двигателя. Длина якоря lя больше длины индуктора lи на длину хода индуктора. Проводники якоря объединены в катушки, оси которых сдвинуты по длине якоря. Выводы катушек подсоединены к полупроводниковому коммутатору. На рис. 5, б показана схема кинематического звена поступательного перемещения с линейным двигателем. Якорь 3 прикреплен к неподвижной направляющей 5, а индуктор 1 – к подвижной каретке 6. На направляющей по осям катушек якоря расположены сигнальные элементы, вызывающие срабатывание датчиков положения индуктора относительно якоря, расположенных на каретке.
mirznanii.com
 Бесконтактный двигатель постоянного тока
Бесконтактный двигатель постоянного тока просмотров - 1225
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а)механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
рис. 30.4. Бесконтактный двигатель постоянного тока:
— блок-схема,
— магнитная система
В качестве датчиков положения ротора применяют чувствительные различные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Хота (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактны-
ми площадками, к которым припаяны выводы /—2, подключенные к источнику напряжения , и выводы 3—4, с которых снимают выходной сигнал
. В случае если в цепи 1—2 проходит ток
, а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение
. Значение ЭДС зависит от тока
и магнитной индукции В, а полярность — от направления тока
в цепи 1—2 и направления вектора магнитной индукции В.
Рис. 30.5. Датчик ЭДС Холла
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VТ1—VТ4 (рис. 30.6). Четыре обмотки (фазы) двигателя расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1—VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2)осуществляется от источника напряжением
.
Рис. 30.6. Принципиальная схема БДПТ
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). В случае если по какой-либо из обмоток (фаз) статора проходит ток от начала Н1—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VТ2 переходит в открытое состояние. В обмотке (фаза) статора появляется ток
, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8,
). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке
возникает ток
и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз
и
. Вектор этого потока повернут относительно оси 2—4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы
, поворачивается относительно оси полюсов 2—4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.
Рис. 30.9. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Таблица 30.1
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-коллекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них... [читать подробенее]
oplib.ru
Двигатели постоянного тока обычного исполнения имеют ценное качество–возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно–коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.

Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с  –фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
–фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме "закрыт" или "открыт".
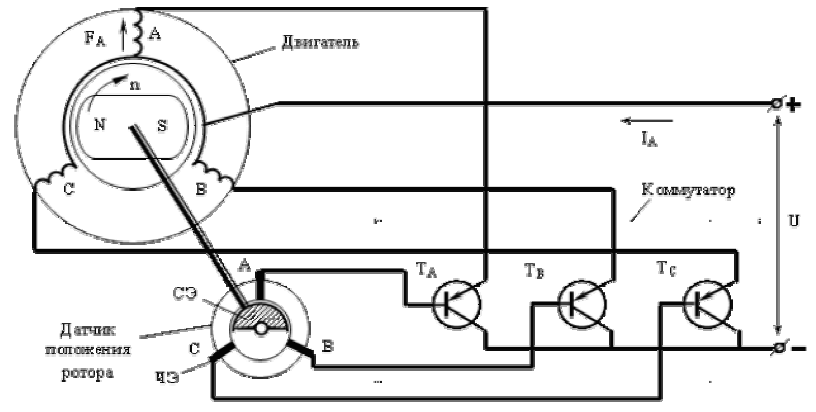
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис. 5.2, сигнальный элемент через чувствительный элемент "А" открывает транзистор  . По обмотке А протекает ток
. По обмотке А протекает ток . Намагничивающая сила обмотки
. Намагничивающая сила обмотки взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший
взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
сразу два транзистора:  и
и . Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора
. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора , которая повернется на
, которая повернется на по сравнению с первым положением (2–й такт на рис. 5.3).
по сравнению с первым положением (2–й такт на рис. 5.3).

Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше  , транзистор
, транзистор закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3–4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента – возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 (5.1)
(5.1)
где  – постоянный коэффициент;
– постоянный коэффициент;  – угол между потоком ротора и НС статора.
– угол между потоком ротора и НС статора.
Так как при вращении двигателя угол  непрерывно меняется, то и момент двигателя не остается постоянным.
непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять–таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо–ЭДС равна 0, а ток – наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.

Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора. В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3–4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. 
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 , (5.3)
, (5.3)
где  – электромагнитная постоянная времени.
– электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 . (5.4)
. (5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при  .
.
Вращающий момент прямо пропорционален току якоря, поэтому
 (5.5)
(5.5)
или
 (5.6)
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую – не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую – переменную. Она появляется из–за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение  .Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
.Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС  в формулу (5.6), получим механическую характеристику бесконтактного двигателя
в формулу (5.6), получим механическую характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент ( ,
, ), а за базисную скорость – скорость холостого хода (
), а за базисную скорость – скорость холостого хода ( ,
, ). Время
). Время
 ;
;  .
.

Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения  и
и  :
: 
Разделим обе части уравнения (5.7) на  :
:
 . (5.8)
. (5.8)
Обозначим  . С учетом
. С учетом  получим
получим
 , (5.9)
, (5.9)
где  – относительная скорость двигателя.
– относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Датчики положения ротора. Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.

Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора ( ,
, ,
, ), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы:
1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в  ?
?
studfiles.net
Двигатели постоянного тока обычного исполнения имеют ценное качество–возможность широко и плавно регулировать скорость вращения. Вместе с тем они обладают существенным недостатком, обусловленным щеточно–коллекторным узлом. Вполне естественно, что появилась мысль создать двигатели, обладающие достоинствами двигателей постоянного тока и свободные от их недостатков. Такие двигатели называются бесконтактными двигателями постоянного тока.
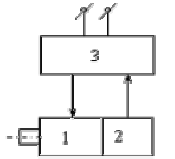
Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с  –фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
–фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис. 5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в пространстве на 120 градусов и соединенными в звезду, ДПР с одним сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их число равно числу обмоток статора), коммутатор, выполненный на трех транзисторах, работающих в ключевом режиме, т.е. в режиме "закрыт" или "открыт".

Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном на рис. 5.2, сигнальный элемент через чувствительный элемент "А" открывает транзистор  . По обмотке А протекает ток
. По обмотке А протекает ток  . Намагничивающая сила обмотки
. Намагничивающая сила обмотки  взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший
взаимодействует с потоком постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во вращение (1–й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При повороте ротора на угол чуть больший  СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
СЭ будет воздействовать сразу на два ЧЭ: на "А" и на "В". Это значит, что будут открыты
сразу два транзистора: и  . Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора
. Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС статора  , которая повернется на
, которая повернется на  по сравнению с первым положением (2–й такт на рис. 5.3).
по сравнению с первым положением (2–й такт на рис. 5.3).
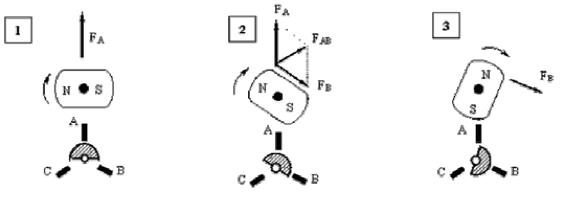
Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействовать с полем постоянного магнита; двигатель продолжает развивать вращающий момент.
Когда угол поворота станет чуть больше  , транзистор закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
, транзистор закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по–прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3–й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3–4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного тока.
1. Пульсация вращающего момента – возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
 (5.1)
(5.1)
где  – постоянный коэффициент;
– постоянный коэффициент;  – угол между потоком ротора и НС статора.
– угол между потоком ротора и НС статора.
Так как при вращении двигателя угол непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря периодически изменяется, становясь то поперечной, то продольно намагничивающей, то продольно размагничивающей (рис. 5.4). Объясняется это опять–таки скачкообразным перемещением НС статора (якоря). Размагничивающее действие поля статора особенно сильно при пуске двигателя, т.к. при этом противо–ЭДС равна 0, а ток – наибольший. С этим необходимо считаться при выборе постоянных магнитов, стабилизация которых происходит в режиме короткого замыкания.
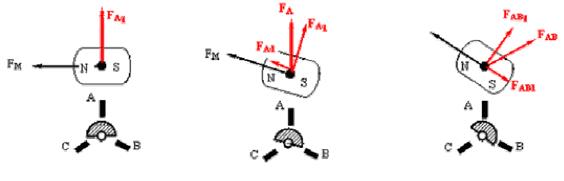
Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора. В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3–4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. 
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
 (5.2)
(5.2)
Решая его относительно тока, получим
 , (5.3)
, (5.3)
где  – электромагнитная постоянная времени.
– электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
 . (5.4)
. (5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при  .
.
Вращающий момент прямо пропорционален току якоря, поэтому
 (5.5)
(5.5)
или
 (5.6)
(5.6)
Анализ выражения (5.6) показывает, что момент имеет две составляющие. Первую – не зависящую от времени. Она равна моменту при отсутствии индуктивности. Вторую – переменную. Она появляется из–за индуктивности обмоток. Эта составляющая при всех скоростях имеет отрицательное значение  . Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
. Поэтому можно утверждать, что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий момент обычного коллекторного двигателя.
Подставим значение ЭДС  в формулу (5.6), получим механическую характеристику бесконтактного двигателя
в формулу (5.6), получим механическую характеристику бесконтактного двигателя
 (5.7)
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (  ,
,  ), а за базисную скорость – скорость холостого хода (
), а за базисную скорость – скорость холостого хода (  , ). Время
, ). Время 
 ;
;  .
.
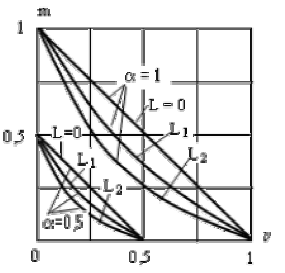
Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения  и
и  :
: 
Разделим обе части уравнения (5.7) на  :
:
 . (5.8)
. (5.8)
Обозначим  . С учетом
. С учетом  получим
получим
 , (5.9)
, (5.9)
где  – относительная скорость двигателя.
– относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при разных индуктивностях обмоток статора L. Видно, что с увеличением L нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
Датчики положения ротора.Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.

Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора (  ,
,  ,
,  ), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
), сдвинутыми в пространстве на 120 эл. град. Сердечники трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя и тр. Первичные обмотки трансформаторов (I) питаются напряжением высокой частоты (порядка нескольких килогерц) от маломощного источника. Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы:
1) Нарисуйте диаграмму НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что дуга чувствительного элемента не 180° , а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в  ?
?
Тихоходные двигатели
В технике часто возникает потребность в двигателях с низкими скоростями вращения (от единиц до нескольких десятков оборотов в минуту) без использования механических редукторов. Применение редукторов нежелательно по причинам их повышенного шума, значительных масс и габаритов, люфтов и ряда других отрицательных последствий. Малые скорости вращения микродвигателей можно получить следующими принципиально разными способами:
1)выполнением дробных обмоток, т.е. обмоток с числом пазов на полюс и фазу  ;
;
2)использованием принципа электромагнитной редукции;
3)выполнением двигателей с катящимся или волновым ротором.
Дробные обмотки
Получение малых скоростей путем увеличения числа пар полюсов (при  ) в микромашинах невозможно из–за ограниченных габаритов последних. Это тем более затруднительно, что во многих случаях они выполняются на повышенные частоты (200, 400 и более герц). Использование обмоток с позволяет решить задачу. Однако не всякое значение q даст положительный результат.
) в микромашинах невозможно из–за ограниченных габаритов последних. Это тем более затруднительно, что во многих случаях они выполняются на повышенные частоты (200, 400 и более герц). Использование обмоток с позволяет решить задачу. Однако не всякое значение q даст положительный результат.
В нашем случае число пазов на полюс и фазу можно записать в виде
 , (6.1)
, (6.1)
где:  – число пазов статора;
– число пазов статора;  – число пар полюсов; – число фаз;
– число пар полюсов; – число фаз;  и
и  – положительные числа.
– положительные числа.
Для того чтобы получить удовлетворительные обмотки, надо выполнить ряд условий:
1) и должны быть несократимыми числами;
2)знаменатель дроби не должен быть кратным числу фаз. Другими словами, для трехфазных обмоток не должно быть кратным 3, а для двухфазных – четным числом;
3) и связаны соотношением , где  – целое число.
– целое число.
Иногда возникает задача выполнить обмотку с максимальным числом пар полюсов в статоре с заданным числом пазов . Тогда
 . (6.2)
. (6.2)
В этом случае числитель дроби выбирается из условия
 (6.3)
(6.3)
Кривая НС обмоток с дробным содержит большое число высших гармоник. Причем, чем ближе к предельному значению, тем ярче выражены эти гармоники. Поэтому значительная часть момента двигателя теряется на преодоление тормозных составляющих. Энергетические показатели таких двигателей, как правило, невысокие.
В качестве примера выполним двухфазную обмотку с числом пазов  и максимально возможным числом пар полюсов.
и максимально возможным числом пар полюсов.
Решая (6.2), получаем
 .
.
Из условия (6.3) находим числитель дроби :
 , т.е.
, т.е.  .
.
Следовательно  .
.
Шаг обмотки по пазам
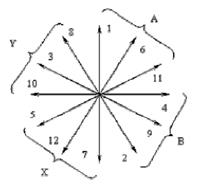
Рис. 6.1. Звезда пазовых ЭДС
Находим угол сдвига пазовых ЭДС в электрических градусах
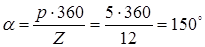 .
.
Строим звезду пазовых ЭДС (рис. 6.1) и разбиваем ее на фазные зоны (в нашем случае на
4) Рисуем пазы, указываем направление токов, приняв, что в зонах Y, A они текут вверх, а в зонах B, X – вниз (рис. 6.2)

Рис. 6.2. Схема дробной обмотки (  )
)
Наконец соединяем катушки наиболее короткими перемычками и получаем нужную обмотку.
На рис. 6.3 для момента времени, когда ток в фазах А и Y равен  , построена диаграмма НС. Видно, что кривая намагничивающих сил далеко не синусоидальная, т.е. она содержит большое число ярко выраженных гармоник. Однако обмотка все–таки создает магнитное поле с 10 полюсами.
, построена диаграмма НС. Видно, что кривая намагничивающих сил далеко не синусоидальная, т.е. она содержит большое число ярко выраженных гармоник. Однако обмотка все–таки создает магнитное поле с 10 полюсами.
Задачи:
1) Построить кривую НС для момента времени, когда ток в фазе А максимальный, а в фазе В равен нулю.
2) Перечислить все возможные значения дробного , если  ,
,  . При каком гармонический состав поля будет наиболее благоприятным?
. При каком гармонический состав поля будет наиболее благоприятным?
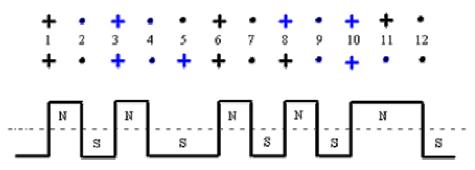
Рис. 6.3. Кривая намагничивающих сил дробной обмотки ( )
infopedia.su

Рис 1.47 Бесконтакный двигатель постоянного тока:
а) – блок-схема, б) – магнитная система
Вал двигателя Д (рис. 1.47, а) механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР—выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
В качестве датчиков положения ротора применяют различные чувствительные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора.
…
Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п.

Рис 1.48. Датчик ЭДС Холла
Наиболее целесообразно использовать датчики ЭДС Холла (рис. 1.48), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактными площадками, к которым припаяны выводы 1—2, подключенные к источнику напряжения U1, и выводы 3—4, с которых снимают выходной сигнал U2. Если в цепи 1—2 проходит токI, а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение U2. Значение ЭДС зависит от тока I и магнитной индукции В, а полярность — от направления тока I в цепи 1—2 и направления вектора магнитной индукции В.
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VT1—VT4 (рис. 1.49). Четыре обмотки (фазы) двигателя w1—w4 расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 1.47).
Датчики Холла ДХ1 иДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VT1— VT4 работают в релейном (ключевом) режиме (рис. 1.49). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2) осуществляется от источника напряжением U1.
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 1.50). Если по какой-либо из обмоток (фаз) статора проходит ток от начала h2—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
При положении ротора, показанном на рис.1.49, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VT2 переходит в открытое состояние. В обмотке (фаза) статора w2 появляется ток i2, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 1.51 а). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VT3. В фазной катушке w3 возникает ток i3 и полюсы 3 и 1 приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз w2 и w3. Вектор этого потока повернут относительно оси 2—4 на угол 45° (рис. 1.51 б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VT2 закрывается, транзистор VT3 останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы w3, поворачивается относительно оси полюсов 2—4 еще на 45° (рис. 1.51 в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VT3 и VT4.

Рис 1.49. Принципиальная схема БДПТ

Рис 1.50 Расположение обмоток фаз на полюсах статора БДПТ
Дальнейшую работу элементов схемы БДПТ (рис. 1.51) до завершения вектором потока Ф одного оборота проследим по табл. 1 и рис. 1.51, а—з.
Таблица 1


Рис. 1.51. Магнитное поле статора в четырехполюсном БДПТ.
На рис. 1.52. показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.

Рис 1.52. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения U1 в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-коллекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.
Раздел 2. Трансформаторы.
Трансформаторы. Назначение, применение, типы.
Трансформатором наз. статический электромагнитный аппарат, предназначенный для преобразования переменного тока одного напряжения в переменный ток другого напряжения.
Тр-ры широко применяются при передаче энергии от электростанций к потребителям на большие расстояния, при распределении ее между приемниками, в выпрямительных установках, усилительных, сварочных, нагревательных и других эл. установках, а также в устройствах связи, сигнализации, автоматики, радио, телевидения и т.д.
При передаче эл. энергии величина тока обуславливает потери энергии в линии. Для уменьшения потерь можно уменьшить сопротивление проводов путем увеличения сечения. Это увеличение веса, укрупнение вышек, затраты на медь и т.д. Однако увеличение напряжения при постоянной мощности приводит к уменьшению тока, а значит можно уменьшить сечение проводов. Передача энергии становится экономически целесообразной и выгодной. Передача энергии производится при очень высоких напряжениях (до 500 кв. и более). Получить такое напряжение в генераторах невозможно, поэтому в начале линии устанавливают повышающие трансформаторы, которые увеличивают напряжение до нужной величины, а в конце линий эл. передач устанавливают понижающие трансформаторы.
На судах при помощи тр-ров создают несколько систем разных по величине напряжений для питания различных устройств и приборов.
| | | следующая страница ==> | |
| Потери и кпд машин постоянного тока. | | | Тема 2.1. Однофазные трансформаторы. |
Дата добавления: 2014-04-17; просмотров: 11.
Поделиться с ДРУЗЬЯМИ:refac.ru
Содержание
1. Введение
2. Основная часть
2.1 Характерные особенности бесконтактных двигателей
2.2 Конструкция бесконтактного двигателя
2.3 Схема электромагнитной системы линейного бесконтактного двигателя
3. Заключение
4. Список использованной литературы
5. Приложения
1. Введение
В начале 60-х г. были разработаны первые бесконтактные электродвигатели постоянного тока типа БП-203, БП-251 и БПС-202. В первом космическом скафандре в кислородном нагнетателе был установлен бесконтактный электродвигатель БПК-401.
За прошедшие 40 лет разработаны 4 поколения бесконтактных электродвигателей. Двигатели 4-го поколения серии БК-1 (20 модификаций), БК-2 (6 модификаций) и ДБ (5 модификаций) применяются в приводах вентиляторов и насосов систем жизнеобеспечения, в системах терморегулирования КА и скафандрах космонавтов. Только на орбитальной станции «Мир» установлено более 100 таких электродвигателей.
Для обеспечения большого гарантийного ресурса двигателей в составе КА с длительным сроком активного существования НПП ВНИИЭМ ведет разработку бесконтактных электродвигателей постоянного тока с гидростатическими опорами ротора для насосных агрегатов. НПП ВНИИЭМ также ведет постоянную работу по совершенствованию разработанных изделий, дальнейшему повышению их надежности и долговечности, а также по созданию новых изделий, в наибольшей степени отвечающих требованиям потребителя.
Техническое решение для бесконтактного гидроподвеса вращающегося ротора обеспечивает возможность реализации электрической машины насосного исполнения с практически неограниченным ресурсом, определяемым лишь сроком сохраняемости электротехнических материалов и комплектующих элементов, способных обеспечить гарантийный ресурс двигателя в составе элек-тронасосного агрегата более 100 тыс. часов.
2. Основная часть
2.1 Характерные особенности бесконтактных двигателей
Коллекторные двигатели постоянного тока обладают хорошими регулировочными свойствами и экономичны, но наличие скользящего контакта коллектор – щетки ограничивает область их применения.
В настоящее время в связи с развитием силовой полупроводниковой электроники появились и начали получать все более широкое распространение бесконтактные двигатели постоянного тока. При замене механического коммутатора – коллектора с щетками полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех, особенно при высоких частотах вращения, когда очень быстро изнашиваются щетки и значительно увеличиваются искрение и радиопомехи.
В отличие от обычного коллекторного двигателя бесконтактный двигатель постоянного тока обладает рядом характерных особенностей.
1. Силовая обмотка якоря расположена на статоре и состоит из нескольких катушек, сдвинутых относительно друг друга в пространстве. Ротор выполняют в виде постоянного магнита.
2. Положение оси магнитного потока ротора по отношению к осям катушек силовой обмотки статора определяется бесконтактными датчиками (трансформаторными, индукционными, магнитоэлектрическими, фотоэлектрическими).
3. Бесконтактный полупроводниковый коммутатор осуществляет коммутацию катушек силовой обмотки статора по сигналам датчиков положения. При мощности двигателей до 0,5 – 1 кВт в качестве коммутирующих элементов обычно используются транзисторы, при большей мощности – тиристоры.
Эти факторы позволяют при устранении скользящего контакта коллектор–щетки сохранить основную особенность машины постоянного тока, заключающуюся в том, что частота переключения катушек обмотки якоря определяется частотой вращения ротора. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением.
2.2 Конструкция бесконтактного двигателя
Рассмотрим простейшую конструкцию бесконтактного двигателя (рис.1).
В корпусе 1 расположены электромагнитные системы двигателя и датчика положения. Магнитопровод статора двигателя 2 выполнен из электротехнической стали. В его пазах расположена обмотка 3, состоящая из двух обмоток, сдвинутых в пространстве на 90°. Каждая обмотка представляет собой сосредоточенную многовитковую катушку. Ротор 4 с одной парой полюсов изготовлен из постоянного магнита. При подаче постоянного напряжения на обмотку статора по ней проходит ток, который по взаимодействии с магнитным потоком ротора создает вращающий момент.
Роль датчика положения ротора относительно обмотки статора выполняют два магнитоуправляемых диода Д1 и Д2, расположенных на дополнительном кольцевом магнитопроводе 5, и вращающийся ферромагнитный диск 6. Диск имеет немагнитную вставку 7, занимающую половину его толщины на половине окружности. Магнитный поток датчика Фд создается постоянным магнитом 8 с радиальной намагниченностью. Каждый из магнитоуправляемых диодов одну половину оборота вала находится в зоне действия магнитного потока Фд и открыт, а вторую - вне зоны действия магнитного потока Фд и закрыт.
Работа датчиков и полупроводникового коммутатора К (рис.2) согласована при расположении датчиков Д1 и Д2 по осям обмоток статора 1 и 2 и линии симметрии диска СС перпендикулярно оси полюсов ротора. В положении, изображенном на рис.2, a, сигнал, управляющий коммутатором, снимается с датчика Д1, и коммутатор подает на обмотку 1 напряжение указанной на рисунке полярности.
Когда сигнал отсутствует, коммутатор К подает на обмотку 1 напряжение противоположной полярности (рис. 2, б). Аналогично со сдвигом на 90° подключается к коммутатору обмотка 2 по сигналам датчика Д2. При этом изменение коммутатором полярности напряжения на обмотках статора осуществляется в момент перехода оси потока ротора через ось данной обмотки статора. Тем самым обеспечивается изменение направления тока в обмотке статора при подходе оси полюса ротора противоположного знака. Следовательно, сохраняется одно направление вращающего момента эм, создаваемого силами Fэм, в пределах полного оборота ротора, т.е. выполняется роль коллектора электрической машины постоянного тока.
На рис.3 показана схема подключения обмоток двигателя к транзисторам TI и Т8 коммутатора и таблица, определяющая порядок переключения транзисторов по сигналам датчиков Д1 и Д2.
Известно, что электромагнитный момент, действующий на виток с током, помещенный в магнитное поле, пропорционален току витка и магнитному потоку и зависит от угла между осями витка и поля. Зависимость электромагнитного момента от угла поворота ротора для двухобмоточного двигателя, включенного по схеме рис. 3, показана на рис. 4.
На этом рисунке M1 и M2 – моменты взаимодействия раздельно с 1 и 2 обмотками, M1,2 - результирующий момент.
Как видно из графиков M1 и M2, при включении напряжения только на одну обмотку статора ротор двигателя не приходит во вращение, если начальное положение ротора соответствует углу Θ, при котором вращающий момент эм меньше момента сопротивления на валу. Кроме того, существенная пульсация вращающего момента в пределах оборота ротора приводит, соответственно, к нестабильности мгновенной угловой скорости ротора.
При наличии двух (и более) обмоток на статоре уменьшение момента взаимодействия ротора с одной из обмоток компенсируется увеличением момента взаимодействия с другой. Соответственно, обеспечивается достаточно большой пусковой момент при любом угловом положении ротора, снижение пульсации вращающего момента в пределах оборота и нестабильности мгновенной угловой скорости ротора.
Характеристики бесконтактных микродвигателей тем ближе к характеристикам классического двигателя постоянного тока, чем больше число обмоток на статоре. Однако пропорционально числу обмоток увеличивается необходимое число чувствительных элементов датчиков положения и число транзисторов в коммутаторе. Поэтому практически число обмоток нецелесообразно более трех–четырех.
2.3 Схема электромагнитной системы линейного бесконтактного двигателя
Для повышения стабильности момента и угловой скорости в пределах оборота применяют специальные схемы модуляции тока в обмотках статора.
В настоящее время крупными сериями выпускаются только бесконтактные микродвигатели. Однако наблюдается тенденция роста выпуска бесконтактных двигателей малой мощности, которые могут составить конкуренцию высокомоментным двигателям, используемым в промышленных роботах, приводах подач обрабатывающих центров и т.д. Объясняется это, в частности, тем что сами бесконтактные двигатели имеют меньшие габариты и массу, чем коллекторные, так как у них лучше условия охлаждения – источники тепла только на статоре, и отсутствует такой источник нагрева, как узел трения коллектор–щетки. Правда, бесконтактный двигатель не может работать без полупроводникового коммутатора.
В ряде случаев двигатели постоянного тока целесообразно делать линейными.
На рис.5, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является подвижной частью линейного двигателя. Якорь 3 представляет собой диэлектрическую пластину, на поверхности которой методом фотолитографии выполнена печатная схема проводников 4. Якорь является неподвижной частью двигателя. Длина якоря lя больше длины индуктора lи на длину хода индуктора. Проводники якоря объединены в катушки, оси которых сдвинуты по длине якоря. Выводы катушек подсоединены к полупроводниковому коммутатору. На рис. 5, б показана схема кинематического звена поступательного перемещения с линейным двигателем. Якорь 3 прикреплен к неподвижной направляющей 5, а индуктор 1 – к подвижной каретке 6. На направляющей по осям катушек якоря расположены сигнальные элементы, вызывающие срабатывание датчиков положения индуктора относительно якоря, расположенных на каретке.
Работа линейного бесконтактного двигателя мало отличается от работы рассмотренного ранее вращающегося бесконтактного двигателя. Различие состоит в том, что силы электромагнитного взаимодействия тока якоря с полем возбуждения индуктора создают тяговое электромагнитное усилие Fтяг в плоскости якоря, которое приводит к поступательному перемещению индуктора.
3. Заключение
Бесконтактные электродвигатели постоянного тока типа БК-1, БК-2, ДБ предназначены для применения в составе научной и служебной аппаратуры космических аппаратов, других технических средств с высокой надежностью и длительным сроком службы без регламентного обслуживания. Основными узлами двигателей являются ротор с постоянными магнитами, статор с обмотками и датчиками положения ротора на эффекте Холла, полупроводниковый коммутатор (встроенный для двигателей БК-1 и БК-2, либо выполненный в виде отдельного конструктива для двигателей типа ДБ). Ротор двигателей БК-2 и ДБ отделен от статора герметичной гильзой, что обеспечивает надежную изоляцию внутренней полости двигателей с вращающимся ротором от окружающей среды, дает возможность простыми средствами встроить электродвигатель, например в насос гидросистемы, не заботясь об установке на вал двигателя каких-либо уплотнителей.
Бесконтактные электродвигатели типа БК-1, БК-2, ДБ различных модификаций успешно применяются в приводах вентиляторов и насосов систем жизнеобеспечения и терморегулирования космических аппаратов, пилотируемых кораблей, скафандров космонавтов. Они используются для перекачки горячей щелочи в насосах электрохимических источников тока, обеспечивают функционирование компрессоров микрокриогенных установок, ряда приборов и систем, в том числе автоматизированных технологических комплексов.
4. Список использованной литературы
1. Учебное пособие «Электромеханические устройства автоматики». М. – 2002.
2. Стома С.А., Ремизов В.Е., Кузьмин В.Н., Медушев С.В., Михайлов Е.М., Тихомиров В.К. Изделия точной электромеханики для космических аппаратов (опыт создания и эксплуатации). М.: МЭИ. 1999.
5. Приложения
бесконтактный двигатель ток аппаратура
Рисунок 1.

Рисунок 2.

Рисунок 3.

Рисунок 4.

Рисунок 5.

znakka4estva.ru
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а)механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
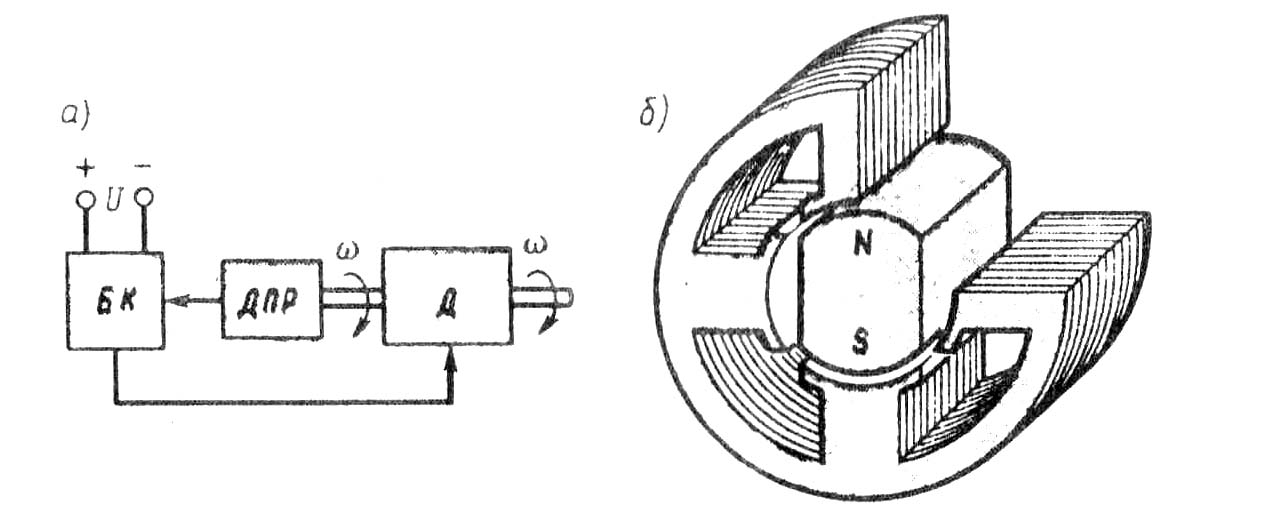
рис. 30.4. Бесконтактный двигатель постоянного тока:
 — блок-схема,
— блок-схема,  — магнитная система
— магнитная система
В качестве датчиков положения ротора применяют чувствительные различные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Хота (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактны-
ми площадками, к которым припаяны выводы /—2, подключенные к источнику напряжения  , и выводы 3—4, с которых снимают выходной сигнал
, и выводы 3—4, с которых снимают выходной сигнал  . Если в цепи 1—2 проходит ток
. Если в цепи 1—2 проходит ток  , а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение . Значение ЭДС зависит от тока
, а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение . Значение ЭДС зависит от тока  и магнитной индукции В, а полярность — от направления тока в цепи 1—2 и направления вектора магнитной индукции В.
и магнитной индукции В, а полярность — от направления тока в цепи 1—2 и направления вектора магнитной индукции В.
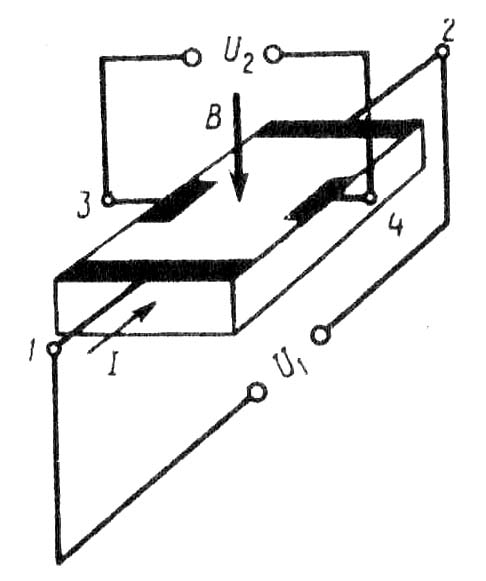
Рис. 30.5. Датчик ЭДС Холла
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VТ1—VТ4 (рис. 30.6). Четыре обмотки (фазы) двигателя 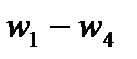 расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1—VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2)осуществляется от источника напряжением .
расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1—VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2)осуществляется от источника напряжением .

Рис. 30.6. Принципиальная схема БДПТ
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). Если по какой-либо из обмоток (фаз) статора проходит ток от начала Н1—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
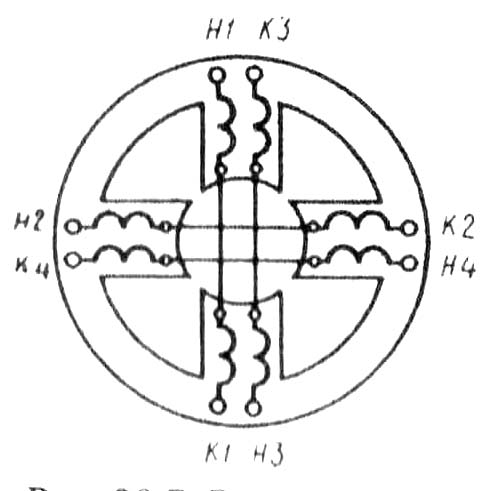
Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VТ2 переходит в открытое состояние. В обмотке (фаза) статора  появляется ток
появляется ток  , протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке
, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке  возникает ток
возникает ток  и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.
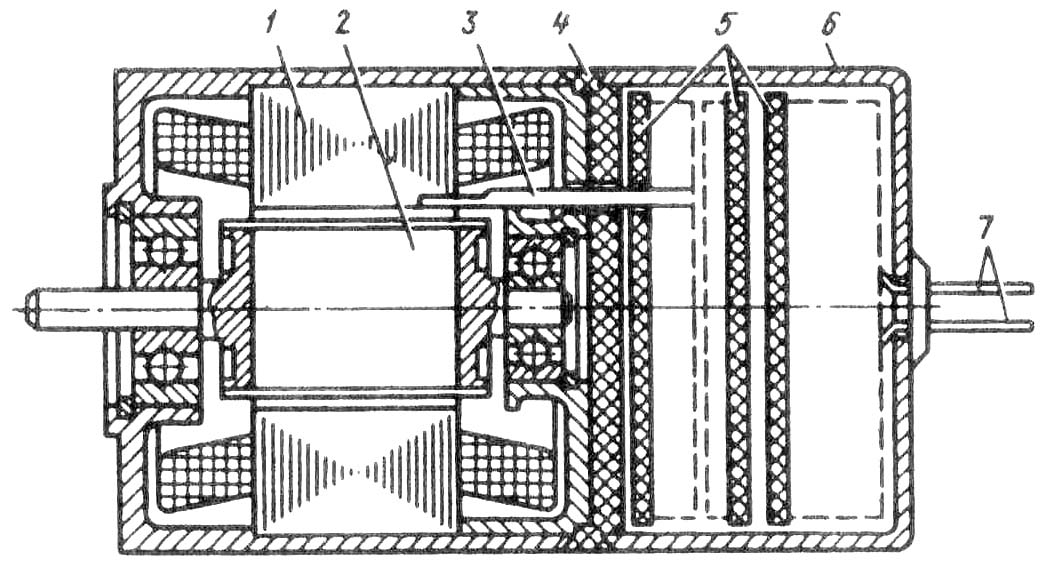
Рис. 30.9. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Таблица 30.1
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения  в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-коллекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.
Читайте также:
lektsia.com










