





Трёхфазные двигатели постоянного тока довольно часто применяются в быту и промышленности. Для их управления требуется техническое средство, преобразующее сигналы малой мощности в токи, способные управлять моторами.
Для этой цели существуют схемы различной степени сложности. Все они отличаются друг от друга либо мощностью, либо элементной базой, на основе которой они изготовлены. Рассмотрим для начала простейшие схемы.
Начинающему электрику приходится задаться вопросом подключения мотора к микроконтроллеру. Самым простым и мощным посредником для этого станет транзистор. Подойдут и полевые, и биполярные транзисторы. Самая элементарная схема управления двигателем постоянного тока показана на рисунке.

По существу, это наипростейший драйвер двигателя постоянного тока, предназначенный выполнить свою функцию. Диод, подключенный параллельно обмоткам мотора, защитит от возгорания элементов микросхемы в момент остановки электродвигателя, когда ЭДС самоиндукции создаст на обмотках резкий скачок напряжения. Транзистор КТ315 позволит:
Для двухстороннего управления необходимо более сложное устройство.
Составление электроэлементов соответствующим образом (по типу Н-моста) позволит управлять мотором в обе стороны. H-мост представлен на чертеже:

Где INA, INB — входные сигналы управления;
VCC — электропитание моторов, в несколько раз превышающее напряжения управляющего сигнала;
GND — общая земля.
При подаче положительного сигнала на один из входов, электродвигатель будет вращаться в ту или иную сторону. Обычно, схема драйвера кроме H-моста, дополняется защитными диодами, фильтрами, опторазвязками и другими улучшениями. Самым популярным чипом драйвером является IR2110.
H-мост предназначается для управления моторами тогда, когда потребляемая мощность превышает 300 Вт. Если детали на рисунке слишком мелкие, то кликните по этой картинке — она увеличится.

В подобных схемах используются МОП-транзисторы. Система управления создаётся на основе микроконтроллеров. Результатом будет сформированная чистая синусоида на выходе.
Использование в бытовых условиях трёхфазных двигателей постоянного тока не вызывает никаких затруднений тогда, когда управление ими осуществляется посредством специальных драйверов, например:



Вооружившись технологией и желанием собрать устройство своими руками можно смело браться за дело. При работе драйверов требуется учитывать конструктивные особенности и некоторые рекомендации по подключению:
Трёхфазные электродвигатели широко применяются на разнообразном оборудовании, их постоянно совершенствуют, благодаря развитию полупроводниковой техники. Предлагаются универсальные решения создания устройств, работающих в широком диапазоне рабочих параметров, обеспечивающих надежную и удобную эксплуатацию агрегатов.
При желании можно самим собрать драйвер, и с помощью него вращать трёхфазный двигатель. По стоимости покупка отдельных компонентов схем и выполнение сборки собственноручно обходится дешевле, чем приобретение готового устройства.
electricdoma.ru

Направления разработок 5-го поколения интегральных драйверов IR для электропривода
Поскольку современные разработки массового электропривода для промышленных приложений и бытовой техники ориентированы в основном на применение трехфазных асинхронных электродвигателей и бесконтактных двигателей постоянного тока, компания International Rectifier уделяет большое внимание совершенствованию соответствующей элементной базы, в том числе высоковольтных микросхем драйверов МОП-затворов. ИС трехфазных драйверов являются наиболее перспективным техническим решением для управления инверторами приводов мощностью до нескольких киловатт. Они позволяют интегрировать на одном кристалле необходимый набор функций управления и защиты силовой электроники, создавать наиболее простую, компактную и стабильную схему управления, не требуют сложных схем питания, обладают высоким быстродействием. Рост требований к силовой электронике массового привода, прежде всего по цене, компактности, КПД, надежности, отражается и на требованиях к драйверам. Технология драйверов 5-го поколения была разработана компанией IR специально для того, чтобы иметь возможность удовлетворять эти растущие требования на длительную перспективу. Эта технология позволяет повысить уровень интеграции функциональных возможностей при сохранении площади кристалла и цены.
В новых разработках драйверов IR для электропривода мощностью до нескольких киловатт можно выделить два основных направления.
Первое преследует цель создания максимально компактных ИС с минимальной ценой при ограниченном росте функциональных возможностей. Эти ИС предназначены для замены ИС предыдущего поколения при модернизации электроники привода, с целью снижения цены и упрощения схемотехники.
Второе направлено на разработку ИС для привода нового поколения с существенно более высокой эффективностью, широким набором функциональных возможностей при сохранении уровней цены и сложности схемотехники.
В рамках этих направлений IR уже приступила к серийному производству нескольких новых семейств драйверов.
Трехфазные драйверы для модернизации серийной продукции
Первым из новых семейств этого направления является серия IRS2336Dx, которая должна заменить популярную серию IR2136x предыдущего поколения.
Общая характеристика серии
В семейство входят 600-вольтовые драйверы IRS2336D и IRS23364D. Диапазон выходных напряжений первого равен 10…20 В (предназначен для управления силовыми МОП-транзисторами), второго 12…20 В (предназначен для управления IGBT). Драйверы выпускаются в 28-выводных корпусах DIP, SOIC и 44-выводном PLCC в бессвинцовом исполнении. Температурный диапазон эксплуатации микросхем от -40 до 125°С, хранения — от -55 до 150°С. Изделия этой серии относятся к классу ИС для индустриальных приложений по стандарту JEDEC JESD 47-E. Микросхемы в корпусах для поверхностного монтажа отвечают требованиям устойчивости к воздействию влажности уровня MSL-3 по JEDEC J-STD-020C. Схема включения этих микросхем представлена на рис. 1.

Рис. 1. Схема включения ИС серии IRS2336xD
Она во многом схожа со схемой для драйверов серии IR2136x, отсутствует лишь цепь бутстрепного ультрабыстрого диода.
Для упрощения перехода со старых ИС серии IR2136x на новые сохранено расположение и назначение выводов. ИС имеет 6 входов управления ключами инвертора (HIN-верхними, LIN-нижними), совместимых с КМОП- и ТТЛ-логикой любого уровня (включая 3,3 В), что позволяет реализовать управление драйвером напрямую от микроконтроллера. Выходы управления ключами инвертора (HO-верхние, LO-нижние) синфазны со входами HIN, LIN у драйвера IRS23364D и находятся в противофазе у IRS2336D.
Типовой уровень выходных токов драйверов новой серии (выводы HO, LO микросхемы) составляет 180 мА и 330 мА (втекающий/вытекающий ток затвора). Графики из справочных листов драйверов серии IRS2336xD (рис. 2) помогут подобрать частоту переключения драйверов при известных величине заряда затвора ключей инвертора и напряжении шины постоянного тока.

Рис. 2. Зависимость максимальной частоты переключения драйвера от заряда затвора транзистора и напряжения шины постоянного тока
Вход En (Enable) предназначен для дистанционного управления драйвером. Разрешение на работу драйвера дается при высоком логическом уровне на входе, запрещение при низком (уровень 0,8 В). Входной фильтр ИС на этом входе устраняет возможность срабатывания от ложных импульсов длительностью до 200 нс.
Интегрированный бутстрепный контур
В новых драйверах роль бутстрепного диода выполняют BootFET — бутстрепные МОП-транзисторы, интегрированные в кристалл ИС, что во многих случаях исключает необходимость применения внешних бутстрепных ультрабыстрых диодов и резисторов. Три бутстрепных транзистора подсоединены ко входу питания Vcc и к выходам Vв1, Vв2, Vв3 источников питания с плавающим уровнем, как показано на рис. 3.

Рис. 3. Подключение BootFET в ИС IRS2336xD
Интегральные BootFET включены только при высоком уровне выходов LO управления нижними ключами инвертора (рис. 4).

Рис. 4. График состояния BootFET
Напряжение Vвs на конденсаторе между выходами B и S циклически повышается в зависимости от времени нахождения выхода LO на низком уровне, емкости конденсатора, напряжения исток-сток (коллектор-эмиттер) и падения напряжения на антипараллельном диоде инвертора. Временные диаграммы бустрепных транзисторов примерно повторяют состояние выходов LO. BootFET находятся в проводящем состоянии при высоком уровне выхода LO и когда Vвs не превышает напряжение питания микросхемы Vcc (равное 15 В) более чем на 10%.
Интегральные бутстрепные транзисторы способны заменить внешние бутстрепные диоды в большинстве практических приложений. Ограничения в их применении могут быть связаны или со специфической схемотехникой (например, при реализации схем 6-шаговой модуляции) или с более низким, чем у ультрабыстрых диодов, быстродействием (в типовых бутстреных цепях обычно применяют диоды со временем обратного восстановления 100 нс). В этих случаях задача может быть решена дополнением схемы включения обычной бутстрепной цепью с ультрабыстрым диодом.
Повышенная устойчивость к помехам
С целью обеспечения высокой помехоустойчивости в драйверах новой серии сохранено разделение сигнальной и силовой земли, как это ранее было сделано в серии IR2136x. Выход сигнальной земли Vss используется в схемах защиты от перегрузки по току и формирования управления на входах HIN, LIN. Выход силовой земли COM совместно с выходами LO применяется при формировании управления нижними ключами инвертора. Помимо этого в новых драйверах применяются усовершенствованные входные фильтры. Отличие в логике работы такого фильтра иллюстрирует рис. 5.

Рис. 5. Логика работы обычного и усовершенствованного входных фильтров
Входной фильтр с обычной логикой работы бланкирует появление высокого уровня на выходе на время фильтрации tFIL,IN, и длительность выходного импульса по отношению ко входному уменьшается на время фильтрации (пунктирная линия на рис. 5). В усовершенствованном фильтре выходной сигнал также появляется с задержкой tFIL,IN, но длительность выходного импульса совпадает с длительностью входного (сплошная линия). Это позволяет эффективно устранять срабатывание схемы как от положительных, так и от отрицательных импульсных помех длительностью менее tFIL,IN. При более длинных входных импульсах длительность входных и выходных импульсов совпадает с достаточно высокой точностью (рис. 6).

Рис. 6. Длительность импульса на выходе усовершенствованного входного фильтра
В драйверах серии IRS2336xD усовершенствованные входные фильтры установлены на входах HIN, LIN управления инвертором (время фильтрации 350 нс) и на входе EN (200 нс).
Обеспечение надежного управления ключами инвертора
Временные задержки между сигналами управления на входе и выходными сигналами меняются в диапазоне 400…750 нс, а времена нарастания и спада на выходе — в диапазонах 110…190 нс и 35…75 нс соответственно. В трехфазных драйверах предусмотрено несколько ступеней функциональной защиты для предотвращения одновременного включения транзисторов инвертора и возникновения сквозных токов.
Специальная логическая схема устанавливает низкий уровень на выходах управления затворами верхнего и нижнего ключей при одновременном появлении высокого логического уровня на входах управления, тем самым блокируя работу драйвера.
В динамическом режиме работы драйвера разброс времен задержки между входным и выходным сигналами и фронтов выходных сигналов каналов драйвера может привести к перекрытию выходных сигналов и нежелательному срабатыванию ключей инвертора. Для предотвращения этого в схеме драйвера предусмотрен логический узел, который обеспечивает одинаковое время срабатывания верхнего и нижнего каналов драйвера, управляющих стойкой инвертора. Максимальная разница времен срабатывания составляет 50 нс (параметр МТ справочного листа). Помимо этого устраняется разница во временах срабатывания как между нижними, так и между верхними ключами.
Для предотвращения сквозных токов инвертора в драйверах предусмотрен узел формирования фиксированной паузы на переключение. Номинальная длительность паузы 300 нс (диапазон 190…420 нс). Схема формирования пауз обеспечивает для каналов управления верхним и нижним ключом разброс длительности пауз не более 60 нс. Это же относится и к разбросу длительности пауз между схемами управления всеми тремя стойками инвертора.
Высокая устойчивость к отрицательному смещению на выходе
Напряжение на выходах трехфазного инвертора (средние точки стоек) при идеальных условиях работы меняется от нуля (шина нулевого потенциала) до напряжения шины постоянного тока. На средней точке стойки Vs может за короткое время возникнуть значительное отрицательное смещение, которое будет передано на выход драйвера. Причиной этого может быть наличие индуктивной нагрузки, паразитные индуктивности в стойках инвертора, коммутация больших токов в течение коротких промежутков времени. Такая ситуация может происходить как в рабочем режиме, так и в режиме короткого замыкания, выключения при перегрузке по току и т.д. Драйверы новой серии способны успешно противостоять таким воздействиям. График на рис. 7 иллюстрирует возможность работы драйверов серии IRS2336xD при ударных отрицательных смещениях напряжения до минус 60 В.
 в зависимости от времени")
Рис. 7. Устойчивость к отрицательному смещению на выходе (средней точке стойки) в зависимости от времени
С учетом этого драйверы новой серии являются гораздо более надежными силовыми ИС для управления инверторами приводов в реальных условиях эксплуатации.
Функции защиты
В новых ИС сохранены функции защиты, реализованные ранее в ИС серии IR2136x.
Вывод FAULT предназначен для передачи информации об аварийной ситуации за время работы таймера, программируемого внешней цепью RRCIN, CRCIN. Номинал резистора может быть выбран в диапазоне от 0,5 до 2 Мом, керамический конденсатор может иметь емкость до 1 нФ. Работа драйвера блокируется в двух случаях — при низком напряжении питания (уровень 8,9…8,2 В) и при наличии высокого уровня на входе ITRIP.
Рисунок 8 иллюстрирует вторую из этих ситуаций. При высоком уровне сигнала на выводе ITRIP напряжение на выводах VRCIN и VFAULT снижается до уровня на выводе Vss (сигнальная земля).

Рис. 8. Временные диаграммы работы таймера и выхода FAULT
Когда уровень сигнала на выводе ITRIP становится низким, запускается таймер, который спустя время tFLTCLR (определяется постоянной времени RС-цепи) производит сброс входа FAULT, уровень сигнала на котором снова становится высоким.
Вход ITRIP может быть использован для обнаружения перегрузки по току в шине нулевого потенциала инвертора. В этом случае выходы ИС переводятся на низкий уровень и выдается сигнал аварийной ситуации по выходу FAULT. Номиналы делителя R0, R1, R2 (рис. 9) определяются исходя из порогового уровня 0,46 В на входе ITRIP и уровня тока срабатывания защиты.

Рис. 9. Схема обнаружения перегрузки по току
Аналогичным образом может быть обеспечена защита от перегрева. Параметры термистора Rt и резисторов R3, R4 должны быть выбраны таким образом, чтобы пороговое напряжение 0,46 В было достигнуто при максимально допустимой температуре. Рисунок 9 показывает, как обеспечить одновременную реализацию этих возможностей с помощью развязывающих диодов.
(Продолжение следует)
Литература
1. Data sheet IR2136x
2. Data sheet IRS2336xD.

Получение технической информации, заказ образцов, поставка —e-mail: [email protected]
Силовой миниблок для сильноточных POL-конверторов
Компания International Rectifier анонсировала iP1206 — новое техническое решение для реализации понижающих синхронных конверторов, применяемых при питании телекоммуникационного и сетевого оборудования. Микросхема является новейшим дополнением в семействе iPOWIRTM силовых миниблоков, содержащих все пассивные компоненты и полупроводниковые приборы для реализации силовой части синхронных преобразователей. На базе iP1206 можно реализовать однофазный конвертор с выходным током до 30 А и двухфазный конвертор с двумя независимыми выходами на токи по 15 А. Обе опции основаны на противофазной работе каналов с целью снижения пульсаций входного напряжения и тока. Для достижения высокой объемной плотности в iP1206 применены полноценный ШИМ-контроллер и оптимизированный силовой каскад на современных полупроводниковых приборах.
Поскольку новая микросхема содержит все важные с точки зрения качества преобразования полупроводниковые и пассивные компоненты, то для создания высококачественного преобразователя требуется дополнительно всего несколько пассивных мощных компонентов. При этом существенно снижаются требования к квалификации разработчика и печатной плате. Особенностями iP1206PBF являются постоянная частота ШИМ 600 кГц в каналах, ограничение тока без потерь, защита от перенапряжения и перегрева, режим старта со смещением, трэкинг выходного напряжения.
Диапазон входных напряжений составляет 7,5…14,5 В, выходных 0,8…5,5 В. Микросхема выпускается в корпусе LGA. Для упрощения освоения применения iP1206 компания предлагает демонстрационный преобразователь IRDCiP1206-B 2х15А и онлайн-моделирование работы преобразователя iP1206 Spice circuit simulation.
Метки: driver, IR, Силовые
В 2015 году компания Infineon приобрела компанию International Rectifier, тем самым значительно усилив свои лидирующие позиции в области силовой электроники. ...читать далее
www.compel.ru
 В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.

Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
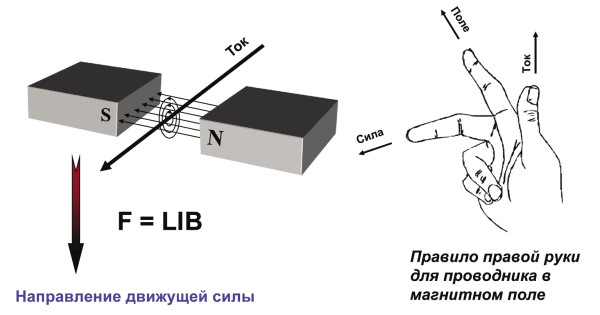
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
Особенности эксплуатации коллекторных двигателей:
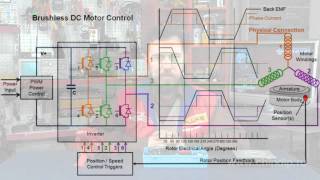
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
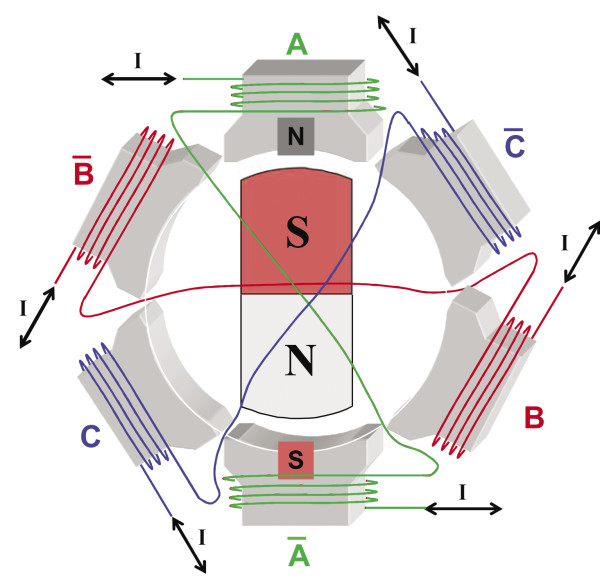
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).

Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.

Рис. 6. Датчики положения ротора электродвигателей
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Рис. 9. Полушаговый режим управления ШД
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Рис. 10. Управление ШД в режиме микрошага
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.

Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.

Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).

Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.

Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).

Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.

Рис. 17. Блок-схема драйвера DRV8837
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.

Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.

Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Получение технической информации, заказ образцов, заказ и доставка.
Рубрика: примеры применений Метки: Texas Instrument, Texas Instruments, TI, бесколлекторный двигатель, коллекторный двигатель, НЭ, управление электродвигателями, шаговый двигатель, электродвигатели
В середине 2001 г. компании Texas Instruments и КОМПЭЛ заключили официальное дистрибьюторское соглашение, которое явилось результатом длительной и успешной работы КОМПЭЛ в качестве официального дистрибьютора фирмы Burr-Brown. (Как известно, Burr-Brown вошла в состав TI так же, как и компании Unitrode, Power Trend и Klixon).
С этого времени компания КОМПЭЛ получила доступ к поставке всей номенклатуры производимых компанией TI компонентов, ...читать далее
www.compel.ru

Подключение 3х фазного двигателя в однофазную сеть. До 1,7 кВт.

Контроллер трехфазного двигателя для электровелосипеда. H-Мосты из MOSFET. Управление мощным двигателем...

Драйвер Асинхронного Двигателя ...
Продолжение: https://www.youtube.com/watch?v=CD3QQxclnX4 Транзисторы КТ814 и КТ961 / КТ815. Плату, схему и исходный код теста скачива...

контролер на PIC16F84 (самописная прошивка) + оптический драйвер HCPL3120 -транзисторы IGBT IKW50N60h4 100А (при 25C) 50А (до...

Запускаем асинхронный двигатель 800 ватт 380в,от BLDC без сенсорного контроллера. Питания 24 вольта.

В этом видео я покажу, как подключит драйвер двигателей постоянного тока L298N =======================================================.

Драйвер Трехфазного Бесколлекторного Двигателя ...

Рассмотрены методы проверки и диагностики неисправности обрыва стержней ротора асинхронного электродвиг...

Драйвер 3х Фазного Двигателя ...

Проверка работы схема, для запуска трехфазного асинхронного двигателя, от сети 220 вольт без конденсаторов....


Частотник от надежного производителя по ценам, ниже чем в Китае! Преобразователь для регулировки частоты...

Драйвер 3 Х Фазного Двигателя ...

Драйвер Асинхронного Двигателя ...
3-х фазный симисторный регулятор, схема. https://goo.gl/photos/QM2uXn4yMxgPXNBRA.

Драйвер Асинхронного Двигателя ...


Самодельный частотник для регулирования оборотов трёхфазного двигателя - вещь, скажу я вам!

Самодельный частотный преобразователь для трехфазного двигателя Тема посвящена самостоятельному изготов...

Простой способ определения начала и конца фазных обмоток электродвигателя.

Какие Надо Драйвера для Трехфазного Преобразователя Частоты ...

Описание и схема устройства: https://drive.google.com/file/d/0B0h2Fo_Qjot3am01Sm1GUmNDQTA/view?usp=sharing ...
Драйвер для эл. двигателя.

Управление асинхронным двигателем контроллером STM8S903, ссылка на статью http://progcont.ru/?option=article_page_class&name=19.


Подключение бесколлекторного двигателя к микроконтроллерам AVR, подробное описание тут http://radioparty.ru/programming/avr...

Закончил привод Y своего cnc станка. Т.к. подходящего шагового двигателя для этой оси я не нашел , то сделал...

Приобрёл у ребят - http://www.elenblog.ru/ElektroPlata_ru Регулятор Оборотов с Поддержанием мощности для коллекторного двига...

Подписывайтесь на нашу группу Вконтакте — http://vk.com/chipidip, и Facebook — https://www.facebook.com/chipidip * Огромное количеств...


РЕГУЛЯТОР ОБОРОТОВ ЭЛЕКТРОДВИГАТЕЛЯ - http://elektroplata.ru/reguljator-oborotov-elektrodvigatelja-tda1085?tracking=1015 КОЛЛЕКТОРНЫЙ ...

Подписывайтесь на нашу группу Вконтакте — http://vk.com/chipidip, и Facebook — https://www.facebook.com/chipidip * Бесщеточные двигат...

Драйвер Двигателей Своими Руками ...


Начало ролика - регулировка опережения работы датчиков холла, далее пробные заезды в безсенсорном режиме,...

Рассмотрим работу частотного преобразователя компании «Оптим Электро» на примере преобразователя серии...
como fazer uma carretilha de pipa como spawnar boss no pixelmon como configurar modem telsec mini strada com som pistola de pregador como tirar o audio ingles de um filme dual audio tiara da galinha pintadinha como ativar o antivirus da oi marmorato passo a passo magebot 8.6
debojj.net
Созданный в конце XIX столетия, трёхфазный асинхронный двигатель стал незаменимой составляющей современного промышленного производства.
Для плавного пуска и остановки такого оборудования требуется специальное устройство – преобразователь частоты. Особо актуально наличие преобразователя для крупных двигателей с большой мощностью. С помощью этого дополнительного устройства можно регулировать пусковые токи, то есть, контролировать и ограничивать их величину.
 Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Если регулировать пусковой ток исключительно механическим способом, не удастся избежать энергетических потерь и уменьшения срока службы оборудования. Показатели этого тока в пять-семь раз превышают номинальное напряжение, что недопустимо для нормальной работы оборудования.
Принцип работы современного преобразователя частоты подразумевает использование электронного управления. Они не только обеспечивают мягкий пуск, но и плавно регулируют работу привода, придерживаясь соотношения между напряжением и частотой строго по заданной формуле.
Основное преимущество устройства – экономия в потреблении электроэнергии, составляющая в среднем 50%. А также возможность регулировки с учётом потребностей конкретного производства.
Устройство функционирует по принципу двойного преобразования напряжения.
На выходе выдаются прямоугольные импульсы, которые под воздействием обмотки статора двигателя (её индуктивности) становятся близкими к синусоиде.
 Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
Производители делают упор на стоимость преобразователя. Поэтому многие опции доступны только у дорогих моделей. При выборе устройства следует определиться с основными требованиями для конкретного использования.
 Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Собрать инвертор или преобразователь можно самостоятельно. В настоящее время в сети находится множество инструкций и схем такой сборки.
Основная задача – получить «народную» модель. Дешёвую, надёжную и рассчитанную на бытовое применение. Для работы оборудования в промышленных масштабах, конечно, лучше отдать предпочтение устройствам, реализуемым магазинами.Порядок действий по сборке схемы частотного преобразователя для электродвигателя
Для работы с домашней проводкой, с напряжением 220В и одной фазой. Примерная мощность двигателя до 1кВт.
На заметку. Длинные провода нужно снабдить помехоподавляющими кольцами.
Регулировка вращения ротора двигателя вмещается в диапазон частоты 1:40. Для малых частот необходимо фиксированное напряжение (IR компенсация).
 Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для однофазной проводки на 220В (использования в домашних условиях) подключение осуществляется по схеме «треугольник». Выходной ток не должен превышать 50% от номинального!
Для трёхфазной проводки на 380В (промышленного использования) подключение двигателя к частотному преобразователю осуществляется по схеме «звезда».
Преобразователь (или инвертор) имеет соответствующие клеммы, помеченные буквами.
Для продления срока эксплуатации преобразователя необходимо соблюдать следующие правила:
Повышение температур приводит к засыханию термопроводящей пасты и разрушению конденсаторов. На силовых компонентах привода её следует менять ни реже одного раза в три года.
Управление асинхронным мотором (например, как подключить трёхфазный электродвигатель в сеть 220в) – довольно сложный процесс. Преобразователи, изготовленные кустарно, дешевле промышленных аналогов и вполне подходят для использования в бытовых целях. Однако для применения на производстве предпочтительнее установить инверторы, собранные в заводских условиях. Обслуживание таких дорогих моделей под силу только хорошо обученному техническому персоналу.
elektrik24.net
Начнем с общей структурной схемы.

Данная структурная схема построена по так называемой схеме двойного преобразования. Трехфазное напряжение 380В частотой 50 Гц поступает на вход неуправляемого выпрямителя. На выходе выпрямителя напряжение составляет около 540 В. Это и есть первый этап преобразования. На втором этапе напряжение при помощи инвертора преобразуется в широтно-модулированные импульсы, которые и поступают на обмотки электродвигателя. Статорные обмотки имеют активно-индуктивный характер сопротивления и являются фильтрами, сглаживающими ток. Среднее значение тока будет зависеть от среднего значения приложенного напряжения, то есть от соотношения длительностей внутри периода ШИМ. Блок управления реализует основные алгоритмы управления инвертором. Обеспечивает диагностику силового модуля, а также выполняет функции противоаварийной защиты. Блок питания предназначен для питания цепей управления.
Выпрямитель. Схема выпрямителя предельно проста.

На вход силового блока поступает трехфазное напряжение сети амплитудой 380 В, и частотой 50 Гц. Для защиты от перенапряжения в схеме используются варисторы VR1- VR3. Далее входное напряжение поступает на выпрямитель с промежуточным звеном постоянного тока. Выпрямитель 36МТ160 представляет собой трехфазную мостовую схему (т.н схема Ларионова) конструктивно выполненную в одном модуле. Во время зарядки конденсатора промежуточного контура протекает очень большой кратковременный ток. Это может вывести из строя выпрямитель. Ток зарядки ограничивается включением балластного резистора R4 последовательно с конденсаторами DC-звена, который активизируется только при включении преобразователя. После зарядки конденсаторов резистор шунтируется, контактными реле К1. Большая емкость конденсаторов требуется для сглаживания напряжения промежуточного звена. После выключения инвертора из сети, конденсаторы сохраняют высокое напряжение в течение определенного времени.
Вот что получилось в итоге.
Блок питания. Собран на микросхеме UC3843. Вообще, что касается блока питания, то вовсе не важно какой будет использован. Хоть самодельный хоть купленный. Главное, на мой взгляд, по возможности питание драйвера IGBT и питания блока управления было от отдельных обмоток трансформатора.
Схема.

Фото.

Инвертор. Схема инвертора.

IGBT-драйвер собран на транзисторах FGA25N120 и связке оптопары TLP250 и микросхемы TC4420. Что касается микросхемы TC4420 то ее мне посоветовал использовать один мой друг который занимается усилителями «класса D».
Готовый инвертор.


Подопытный кролик Электродвигатель. Двигатель взял для начала малой мощности. Закрепил на нем инкрементальный энкодер «RO6345» фирмы «IFM».

Все это протестировано, проверено и ждет изготовления блока управления. Будем надеется что у меня хватит терпения, времени и сил довести этот проект до работающего прототипа.
Продолжение следует…
we.easyelectronics.ru
Электропитание
Главная ![]() Радиолюбителю
Радиолюбителю ![]() Электропитание
Электропитание
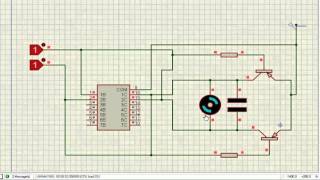
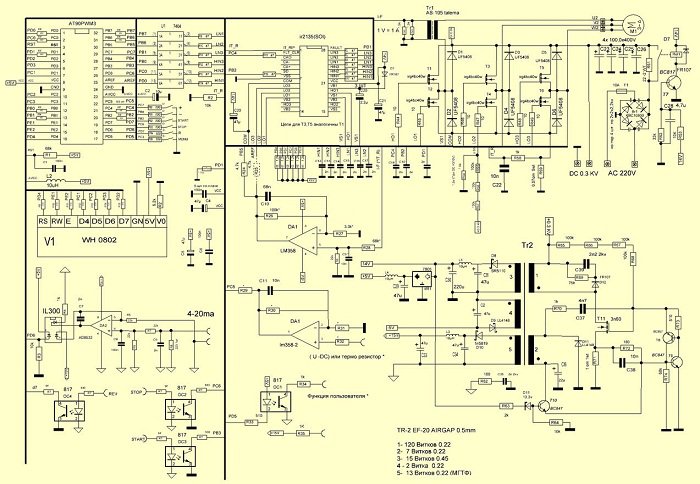
Предлагаемый инвертор состоит из микроконтроллера, узла защиты от превышения допустимого тока нагрузки и мощных коммутаторов напряжения на IGBT. управляемых специализированными микросхемами-драйверами.

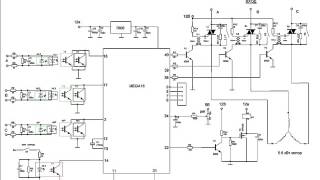
Рис. 1
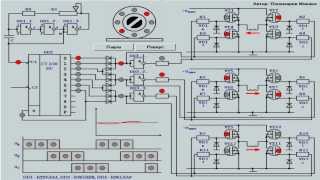
На рис. 1 представлена схема инвертора.Тактовая частота микроконтроллера задана внешней цепью R5R6C2 Входящим в нее подстроенным резистором R5 можно ее установить такой, чтобы частота сформированного трехфазного напряжения соответствовала требуемой. На выходах RBO-RB5 микроконтроллера формируются сигналы управления узлами А1-A3 - мощными коммутаторами напряжения 300 В. Эти узлы идентичны и построены по стандартной схеме. При желании три установленные в них микросхемы IR2110 можно заменить одной - IR2130 На выходе RB7 микроконтроллера формируются импульсы установки триггера токовой защиты в исходное состояние.Трехфазное напряжение близкой к синусоидальной формы образуется на выходах ХТЗ-ХТ5 инвертора за счет программного изменения соотношения интервалов открытого и закрытого состояний "верхних" и "нижних" плеч коммутаторов А1- A3. В каждой фазе формируется по 36 импульсов переменной длительности на период выходного напряжения Больше, к сожалению, не позволяют ограниченные ресурсы примененного микроконтроллера.
Датчиком тока нагрузки инвертора для узла защиты от превышения его допустимого значения служит резистор R10, включенный в общую минусовую цепь питания коммутаторов А1- A3. Если падение напряжения на этом резисторе превысит 1,7 В, изменяется логический уровень напряжения на выходе компаратора DA1, что "перебрасывает" триггер из элементов DD2.1, DD2.2 в состояние с высоким уровнем на выходе элемента DD2.2. Этот уровень, поступая в узлы А1- A3 запрещает работу установленных там микросхем-драйверов, что приводит к немедленному закрыванию всех IGBT и к прекращению тока во всех трех фазах подключенного к инвертору электродвигателя Триггер возвращается в исходное состояние по сигналу микроконтроллера. Порог срабатывания защиты устанавливают подстроечным резистором R1.Источник напряжения 300 В собран по схеме, предложенной Э Мурадханя-ном и Э Пилипосяном в статье "Регулируемый выпрямитель для питания электродвигателей" ("Радио", 2006, №11, с. 40-43) с учетом поправки в "Радио", 2007, № 6, с. 50. Источник был дополнен сетевым фильтром При эксплуатации инвертора важно обеспечить очередность включения питающего напряжения. Первым напряжение 220 В подается на трансформатор Т1 (рис 1) и лишь затем включается напряжение 300 ВИнвертор был проверен при работе с асинхронным трехфазным двигателем мощностью 1 кВт, обмотки которого были соединены треугольником. Форма тока в фазах, проверенная с помощью осциллографа, подключенного через трансформатор тока, оказалась практически синусоидальной. При проверке было выяснено, что пусковой момент на валу двигателя недостаточен, а пусковой ток слишком велик.Тот факт, что выходное напряжение источника 300 В после его включения плавно нарастает в течение приблизительно 3 с, был использован для устранения указанных недостатков путем плавного пуска двигателя. Для этого необходимо изменять частоту трехфазного напряжения пропорционально текущему значению напряжения источника 300 В Чтобы реализовать эту идею, микроконтроллер PIC16F84 был заменен на PIC16F676, имеющий встроенный АЦП.

Рис. 2
Схема замены показана на рис. 2.В программу микроконтроллера PIC16F676 введен анализ текущего значения напряжения источника 300 В. При его изменении от 0 до 300 В частота формируемого трехфазного напряжения нарастает от 12 до 50 Гц и в дальнейшем остается равной достигнутому значению.
Программы для микроконтроллеров PIC16F84 и РIС 16F676 можно скачать здесь.
Автор: А. Титов, г. Сходня Московской обл.
Дата публикации: 24.06.2010
Мнения читателейВы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net









