





Содержание
1. Цель работы
2. Назначение АИД
3. Конструкция АИД
4. Магнитные поля АИД
5. Вращающий момент АИД
6. Способы управления АИД
7. Самоход и способы его устранения
8. Статические свойства АИД
9. Динамические свойства АИД
10. Программа экспериментальных исследований АИД
11. Расчеты и построения
12. Содержание отчета
13. Контрольные вопросы
Приложение А
Приложение Б
1. Цель работы
В настоящей лабораторной работе изучается назначение, конструкция, принцип действия, а также статические и динамические свойства асинхронного исполнительного двигателя переменного тока (АИД) с полым немагнитным ротором.
Изучаемый двигатель предназначен для работы в системах управления и автоматики (СУ и А) как преобразователь электрического сигнала, вырабатываемого устройством управления СУ и А, в скорость вращения или угол поворота вала.
Существуют три разновидности асинхронных исполнительных микродвигателей: с полым немагнитным ротором, с полым магнитным ротором и с короткозамкнутой обмоткой типа беличьего колеса. В СУ и А наибольшее распространение получили асинхронные исполнительные двигатели с полым немагнитным ротором. Такие двигатели производятся на мощности от сотых долей до нескольких сотен ватт, для стандартной – 50 Гц. и повышенных частот (200, 400,500 и 1000 Гц.) питающего напряжения. Скорость их вращения лежит в диапазоне 1500¸ 3000 oб/ мин.
Основными достоинствами асинхронных исполнительных двигателей с полым немагнитным ротором являются:
- Малый момент инерции J ротора.
- Значительный пусковой момент вследствие повышенного сопротивления ротора, что совместно с малым J приводит к значительному быстродействию двигателя, малой электромеханической постоянной времени и обеспечивает повышенную устойчивость следящих систем с таким типом двигателей.
- Механическая (выходная, нагрузочная) характеристика двигателя близка к прямолинейной за счёт большого активного сопротивления ротора, обеспечивающего значительное критическое скольжение (то есть скольжение при максимальном моменте
 ).
). - Широкий диапазон регулирования скорости (кратность регулирования
 ), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода.
), отсутствие скачкообразных изменений, прямая пропорциональность скорости напряжению управления, способность к быстрому реверсу (изменению направления вращения), отсутствие высших зубцовых гармоник в кривой поля, что определяет плавность и бесшумность хода. - Самоторможение двигателя при снятии сигнала управления (определяется большим
 ).
). - Отсутствие подвижных контактов, малый момент трения, отсутствие искрения и радиопомех, стабильность и надёжность в эксплуатации.
- Независимость параметров и характеристик двигателя от температуры, давления, влажности.
- Возможность улучшения массо-габаритных показателей при переходе к повышенным (400 ¸ 500 Гц.) частотам питающего напряжения.
Асинхронный исполнительный двигатель с полым немагнитным ротором имеет следующие недостатки:
- Большой немагнитный зазор в магнитной цепи машины (
 ), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности (
), что определяет большой намагничивающий ток, увеличенные потери энергии и относительно низкий, по сравнению с другими типами АИД, коэффициент мощности ( ).
). - Значительное электрическое сопротивление ротора и, как следствие, работа двигателя при больших скольжениях, что приводит к увеличению потерь энергии в статоре и роторе, а также к снижению КПД.
- Относительно увеличенные удельные (то есть приходящиеся на единицу полезной мощности) масса и габариты двигателя.
3. Конструкция АИД
Конструкция АИД должна решать задачу преобразования электрической энергии в механическую, приводящую во вращение вал двигателя с присоединённой нагрузкой (объектом управления). Это преобразование в общем виде описывается законом электромагнитного усилия, который утверждает, что механическая сила возникает при взаимодействии одноимённых полей (электрических или магнитных) и приложена к инерционным источникам этих полей.
В электромагнитных устройствах систем управления взаимодействуют два магнитных поля, причём одно поле должно создаваться той частью машины, которая будет вращаться, а источник второго поля может быть неподвижным. Поэтому в конструкции любой электрической машины имеется неподвижная часть- статор и подвижная- ротор.
В данной лабораторной работе исследуется АИД переменного тока с полым немагнитным ротором. Схема его конструкции показана на рисунке 1, а макет имеется на рабочем столе возле лабораторного стенда.

Рисунок 1 - Схема конструкции асинхронного исполнительного двигателя с полым немагнитным ротором
Неподвижная часть машины состоит из внешнего магнитопровода 5 с обмотками 4,внутреннего магнитопровода 3, корпуса 6, левого 7 и правого 8 подшипниковых щитов с подшипниками 9 и узлов 10 соединения корпуса со щитами. Подвижная часть машины содержит вал 2 с жёстко укреплённым на нём тонкостенным цилиндром 1. Внешний магнитопровод 5 неявнополюсный, представляет собой стальное кольцо собранное из листовой электротехнической стали, по внутренней поверхности которого расположены пазы, в которые укладываются две распределённые обмотки, изготовленные из изолированного медного провода круглого или прямоугольного сечения. Оси этих обмоток смещены в пространстве на 90 электрических градусов. Внутренний магнитопровод 3 также неявнополюсный,набран из листов электоротехнической стали и укреплён на цилиндрическом выступе одного из подшипниковых щитов 7. Он служит для уменьшения магнитного сопротивления на пути рабочего магнитного потока машины и не имеет пазов и обмоток.
В микродвигателях, мощность которых не превышает 1.5 Вт, диаметр расточки статора (внутренний диаметр внешнего магнитопровода 6) мал и для облегчения укладки обмоток пазы выполняют по внешней поверхности внутреннего магнитопровода 3. При этом его диаметр несколько увеличивают для увеличения обмоточного пространства. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем магнитопроводе.
Корпус и подшипниковые щиты в микромашинах выполняются из алюминиевых сплавов. В крупных машинах эти части конструкции выполняются обычно сварными из стальных листов необходимой толщины, реже литыми. Подшипники чаще всего используются шариковые качения, а в крупных машинах - роликовые. Если от двигателя требуется бесшумная работа, применяют подшипники скольжения – бронзовые или бронзографитные. В микромашинах используются полузакрытые пазы для укладки обмоток – рисунок 2. Внутреннюю поверхность паза изолируют 1, заполняют проводниками обмотки 2 и закрепляют проводники деревянными или пластмассовыми клиньями 3. На рисунке 2 показан паз, выполненный на внешнем магнитопроводе, если же его выполнять на внутреннем магнитопроводе, то граница пройдёт по штриховой линии.

Рисунок 2 - Полузакрытый паз магнитопровода
Особенностью рассматриваемого двигателя является конструкция его ротора. Вал ротора 2 свободно вращается в подшипниках 9. На валу жёстко укреплён тонкостенный цилиндр 1, который также именуется стаканом. Стакан выполняется из немагнитного токопроводящего материала, как правило, из алюминиевых сплавов. Данная технология используется для получения минимальной механической инерционности двигателя, то есть для снижения его постоянной времени. Толщина стенок зависит от мощности двигателя и составляет
 мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода
мм, изготовление более тонких стенок технологически усложнено. Воздушные зазоры между стенками стакана и, обращёнными к нему поверхностями магнитопровода  мм. Общий воздушный зазор в двигателе
мм. Общий воздушный зазор в двигателе мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт.
мм. Это обуславливает увеличение удельной (то есть приходящейся на единицу мощности) массы и габаритов по сравнению с другими типами асинхронных двигателей. Поэтому АИД с полым немагнитным ротором строят в диапазоне мощностей от долей до нескольких сотен ватт. 4. Магнитные поля АИД
Схема включения асинхронного исполнительного двигателя с полым немагнитным ротором показана на рисунке 3.
Теория вращающихся электромеханических преобразователей энергии показывает, что общее требование к работоспособной электрической машине заключается в том, чтобы магнитные поля ротора и статора обладали одинаковым количеством пар полюсов и были неподвижны относительно друг друга при работе машины в установившемся режиме. Значит, если поле ротора вращается, то для обеспечения неподвижности относительно него, поле статора тоже должно вращаться. Поле статора создаётся токами, протекающими по двум его обмоткам. Одна из них называется обмоткой возбуждения ОВ и постоянно находится под напряжением
 . Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение
. Втораяобмотка расположена перпендикулярно обмотке возбуждения и называется обмоткой управления ОУ. Напряжение  на обмотку
на обмотку 
Рисунок 3 - Схема включения АИД
управления подаётся от устройства управления лишь в том случае если необходимо вращение ротора. Такая машина называется двухфазной. Чтобы эти две обмотки создавали вращающееся поле, их необходимо питать токами
 и
и  , сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0 суммарное поле
, сдвинутыми относительно друг друга во времени (по фазе). Процесс создания вращающегося поля в двухфазной машине, когда обмотки статора сдвинуты в пространстве на 90 электрических градусов и питаются токами, сдвинутыми по фазе на 90 градусов, показан на рисунке 4. В момент времени t=t0 суммарное поле  равно полю возбуждения
равно полю возбуждения  , так как ток
, так как ток  максимален, а ток
максимален, а ток  в обмотке управления в этот момент равен нулю. В момент t=t1 имеем wt=45°,
в обмотке управления в этот момент равен нулю. В момент t=t1 имеем wt=45°,  ,
,  ,
,  . При t=t2 имеем wt=90°,
. При t=t2 имеем wt=90°,  ,
,  ,
,  и т. д. Очевидно, суммарный вектор
и т. д. Очевидно, суммарный вектор  по величине остаётся неизменным и равным
по величине остаётся неизменным и равным  , а по направлению
, а по направлению mirznanii.com
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется

Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.

Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
studfiles.net
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется

Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.

Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
studfiles.net
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется

Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.

Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
studfiles.net
Cтраница 1
Асинхронные исполнительные двигатели [7-11, 60, 61] широко применяются в системах автоматического управления. Одна из обмоток статора называется обмоткой возбуждения ( В) и находится под постоянным напряжением ( /, а вторая называется обмоткой управления ( У) и питается напряжением Uy, значение ( рис. 31 - 1, а к б) или фаза ( рис. 31 - 1, в) которого изменяются под воздействием управляющего сигнала. В первом случае управление называется амплитуд-н ы м, а, во втором - фазовым. В обоих случаях напряжения [ / и Uy сдвинуты по фазе, в результате чего двигатель способен развивать вращающий момент. [2]
Асинхронные исполнительные двигатели имеют следующие разновидности конструкции ротора: 1) с обмоткой в виде беличьей клетки, 2) полый немагнитный ротор и 3) полый ферромагнитный ротор. [4]
Асинхронные исполнительные двигатели [7-11, 60, 61] широко применяются в системах автоматического управления. Одна из обмоток статора называется обмоткой возбуждения ( 8) и находится под постоянным напряжением UB, а вторая называется обмоткой управления ( У) и питается напряжением Uv, значение ( рис. 31 - 1, а и б) или фаза ( рис. 31 - 1, в) которого изменяются под воздействием управляющего сигнала. В первом случае управление называется амплитудным, а во втором - фазовым. [6]
Асинхронные исполнительные двигатели имеют следующие разновидности конструкции ротора: 1) с обмоткой в виде беличьей клетки, 2) полый немагнитный ротор и 3) полый ферромагнитный ротор. [8]
Асинхронные исполнительные двигатели, применяемые в устройствах автоматики, служат для преобразования подводимого к ним электрического сигнала в механическое перемещение вала. При заданном тормозном моменте частота вращения двигателя должна строго соответствовать подводимому напряжению и меняться при изменении его величины или фазы. Таким образом, исполнительные двигатели являются управляемыми двигателями. [9]
Асинхронные исполнительные двигатели, применяемые в устройствах автоматики, служат для преобразования подводимого к ним электрического сигнала в механическое перемещение вала. При заданном тормозном моменте скорость вращения двигателя должна строго соответствовать подводимому напряжению и меняться при изменении его величины или фазы. Таким образом, исполнительные двигатели являются управляемыми двигателями. [11]
Асинхронные исполнительные двигатели, применяемые в устройствах автоматики, служат для преобразования подводимого к ним электрического сигнала в механическое перемещение вала. При заданном тормозном моменте частота вращения двигателя должна строго соответствовать подводимому напряжению и изменяться в широком диапазоне - от нуля до максимума при изменении его значения или фазы. Таким образом, исполнительные двигатели являются управляемыми. [12]
Асинхронные исполнительные двигатели имеют на статоре две отдельные обмотки, сдвинутые в пространстве под углом 90 зл. Одна из них постоянно присоединена к напряжению сети и называется обмоткой возбуждения. На другую обмотку подается сигнал управления, величина или фаза которого определяет скорость вращения двигателя. Ее называют обмоткой управления. Для предупреждения самохода активное сопротивление короткозамкнутого ротора выбирается настолько большим, чтобы исключить возможность вращения двигателя за счет однофазного пульсирующего поля, иначе после исчезновения сигнала на обмотке управления двигатель продолжал бы вращаться как однофазный. В этом случае после снятия сигнала с обмотки управления на ротор действует тормозной момент ( см. рис. XI.32, в), вследствие чего время остановки ротора оказывается меньшим, чем при одновременном снятии напряжения с обмоток возбуждения и управления. [13]
Асинхронный исполнительный двигатель соединен с приводным валом через электромагнитную муфту. На счетчике предварительно устанавливается величина перемещения. При включении системы муфта замкнута и механизм перемещается. Сигнал со съемника датчика поступает на управление ШД. Шаговый двигатель вращает механический счетчик. [15]
Страницы: 1 2 3 4 5
www.ngpedia.ru
Асинхронные исполнительные двигатели выпускаются следующих видов: 1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа "беличья клетка".
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности – от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора–сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1–1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина
которых обычно не превосходит 0,15–0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.

Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1–5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую – на внешнем статоре.
Достоинства двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01–0,1 с. при f = 50 Гц и 0,02–0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05–0,1)rр].
3) Высокая чувствительность – малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Недостатки двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая – для авиационной и космической техники, а третья – для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3–3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2–0,3 мм). Однако намагничивающий ток ( ) этого двигателя практически мало отличается от
) этого двигателя практически мало отличается от  двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные с омеднением ротора с целью увеличения пускового момента, оказались малоэффективными. Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам в работе. В целом эти двигатели значительно уступают двигателям с полым немагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой "сквозной" конструкции.
Первые отличаются от силовых машин только повышенным активным сопротивлением ротора и используются в тех установках, где требования высокого быстродействия не играют существенной роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что диаметр расточки статора  равен наружному диаметру подшипника
равен наружному диаметру подшипника  (рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.
(рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.

Рис. 1.18. Асинхронный исполнительный двигатель "сквозной" конструкции
"Сквозная" конструкция позволяет получать воздушные зазоры в 0,03–0,05 мм, что на уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно  .
.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД,  , вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
studfiles.net
Асинхронные исполнительные двигатели выпускаются следующих видов:
1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа "беличья клетка".
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности - от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора-сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1-1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина которых обычно не превосходит 0,15-0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.
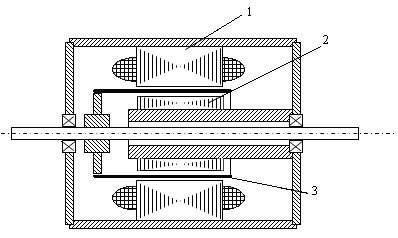
Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1-5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую - на внешнем статоре.
Д о с т о и н с т в а двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01-0,1 с. при f = 50 Гц и 0,02-0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05-0,1)rр].
3) Высокая чувствительность - малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Н е д о с т а т к и двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая - для авиационной и космической техники, а третья - для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3-3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2-0,3 мм). Однако намагничивающий ток (Im) этого двигателя практически мало отличается от Im двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные сомеднением ротора с целью увеличения пускового момента, оказались малоэффективными.Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам вработе. Вцелом эти двигатели значительно уступают двигателям с полымнемагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым роторомвыпускаются обычного исполнения и специальной, так называемой "сквозной" конструкции.
Первые отличаются от силовых машин только повышенным активным сопротивлением ротора и используются в тех установках, где требования высокого быстродействия не играют существенной роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что диаметр расточки статора Di равен наружному диаметру подшипника Dп (рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.

Рис. 1.18. Асинхронный исполнительный двигатель "сквозной" конструкции
"Сквозная" конструкция позволяет получать воздушные зазоры в 0,03-0,05 мм, что на порядок меньше, чем в двигателях традиционной конструкции. Кроме того, для уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно Lр/Dр = 2-3.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД, cosj, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
studfiles.net









