





Подвижная часть линейного двигателя совершает поступательное движение, поэтому применение этих двигателей для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшим потери в передачах и повысить надежность механизма в целом.
Возможны линейные двигатели четырех видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронных. Асинхронные (индукционные) линейные двигатели благодаря простоте конструкции и высокой надежности получили наибольшее применение.
Для объяснения принципа работы линейного асинхронного двигателя обратимся к асинхронному двигателю с вращательным движением ротора. Если статор этого двигателя (рис. 17.10, а) мысленно «разрезать» и «развернуть» так, чтобы он образовал дугу с углом α (рис. 17.10, б), то диаметр ротора увеличится. При этом мы получим асинхронный двигатель с дуговым статором Частота вращения (об/мин) магнитного поля статора этого двигателя (синхронная частота)
n1 = n01 α /(2π) (17.6)
где n01 — синхронная частота вращения обычного (до «разрезания») асинхронного двигателя, об/мин; α — угол дуги статора, рад.
Из (17.6) следует, что, изменяя угол α, можно получить дуговой асинхронный двигатель на любую синхронную частоту меньше частоты вращения n01. Дуговые двигатели применяют для безредукторного привода устройств, требующих небольших частот вращения, исключив применение сложного и трудоемкого редуктора.

Рис. 17.10. К понятиям о дуговом и линейном двигателях
Если же «разрезанный» статор развернуть в плоскость, то получим асинхронный линейный двигатель (рис. 17.10, в). Принципиальное конструктивное отличие линейного асинхронного двигателя от асинхронного двигателя с вращательным движением ротора
состоит в том, что первичный элемент линейного двигателя (индуктор) создает не вращающееся, а бегущее магнитное поле и нижняя часть двигателя с короткозамкнутой обмоткой (или без нее) называемая вторичным элементом, перемещается вдоль своей оси. Скорость бегущего поля в линейном двигателе (м/с)
v1 = 2τf1 = f1Lc /p (17.7)
где f1 — частота тока в обмотке статора, Гц; τ — полюсное деление; Lc — длина статора (индуктора), м.
Принцип действия линейного асинхронного двигателя основан на том, что бегущее поле индуктора, сцепляясь с короткозамкнутой обмоткой вторичного элемента двигателя, наводит в ней ЭДС. Возникающие в стержнях этой обмотки токи взаимодействуют с бегущим полем индуктора и создают на индукторе и вторичном элементе электромагнитные силы, стремящиеся линейно переместить подвижную часть двигателя относительно неподвижной. В некоторых конструкциях линейных двигателей подвижной частью является индуктор, а в некоторых — вторичный элемент, называемый в этом случае бегунком. Если вторичный элемент линейного двигателя невозможно изготовить с короткозамкнутой обмоткой, то применяют вторичные элементы в виде полосы из меди, алюминия или ферромагнитной стали. Наиболее удовлетворительными получаются характеристики линейного двигателя при составном вторичном элементе, например выполненном в виде полосы из ферромагнитной стали, покрытой слоем меди.
Основной недостаток асинхронных двигателей с разомкнутым статором — дуговых и линейных — явление краевого эффекта, представляющего собой комплекс электромагнитных процессов, обусловленных разомкнутой конструкцией статора. К нежелательным последствиям краевого эффекта в первую очередь следует отнести появление «паразитных» тормозных усилий, направленных против движения подвижной части двигателя, и возникновение поперечных сил, стремящихся сместить подвижную часть двигателя в поперечном направлении. Кроме того, краевой эффект вызывает ряд других нежелательных явлений, ухудшающих рабочие характеристики линейных двигателей.
Линейные асинхронные двигатели применяют для привода заслонок, ленточных конвейеров, подъемно-транспортных механизмов. На рис. 17.11 показано устройство линейного асинхронного двигателя привода тележки подъемного крана. На тележке 3 расположен индуктор линейного двигателя, состоящий из шихтованного сердечника 6, в пазах которого расположена обмотка 5. Направляющая для колес 2 представляет собой стальную балку 7, к нижней части которой прикреплена стальная полоса 4. Бегущее магнитное поле индуктора наводит в стальной полосе 4 вихревые токи. Электромагнитные силы, возникающие в результате взаимодействия этих токов с магнитным полем индуктора, перемещают индуктор (тележку) вдоль стальной полосы 4.
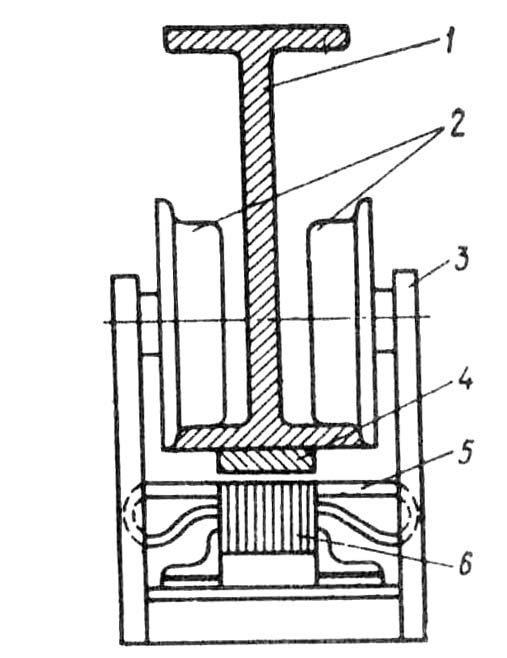
Рис. 17.11. Линейный асинхронный двигатель
привода тележки подъемного крана
Линейные асинхронные двигатели значительной мощности применяют на транспорте в качестве тяговых двигателей. Один из вариантов такого двигателя показан на рис. 17.12. Здесь индуктор 2 двигателя подвешен к транспортному средству 1, а стальная полоса 3 установлена вертикально на основании пути между рельсами. Из этой конструкции поперечная сила Fп вызванная краевым эффектом используется полезно, так как она уменьшает силу давления на несущие оси и колеса и, как следствие, уменьшает трение качения.
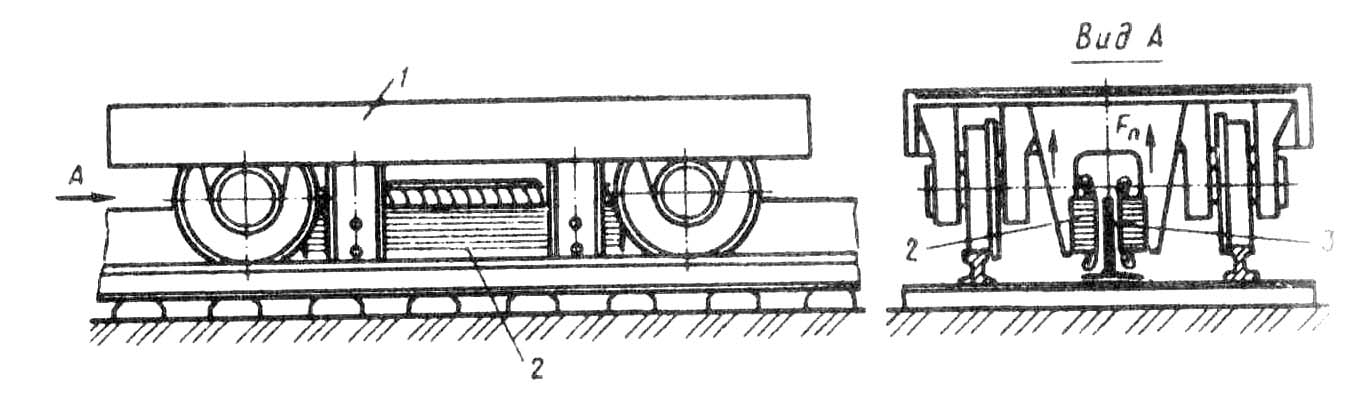
Рис 17.12. Линейный асинхронный двигатель
привода железнодорожного транспортного средства
Контрольные вопросы
1.В чем различие между схемами соединения индукционного регулятора напряжения и фазорегулятора?
2.Сколько раз напряжение на выходе ИР достигнет наибольшего значения за один оборот ротора, если обмотка имеет 2р = 6?
3.В каком направлении следует вращать ротор АПЧ, чтобы на выходе получить ЭДС частотой, большей частоты тока в сети?
4.Какую долю мощности на выходе АПЧ составит мощность приводного двигателя, если частота тока на входе АПЧ равна 50 Гц, а на выходе — 100 Гц?
5.Объясните работу сельсинов в индикаторной системе передачи. Чем вызвана ошибка в воспроизведении угла поворота?
6.Чем обеспечивается отсутствие самохода в асинхронном исполнительном двигателе?
7.Объясните принцип работы асинхронного линейного двигателя.
8.Что такое краевой эффект и каковы его нежелательные действия в линейном асинхронном двигателе?
ГЛАВА 18
• Конструктивные формы исполнения электрических машин
Читайте также:
lektsia.com
Cтраница 1
Линейные асинхронные двигатели используются в качестве насосов, когда ротором является жидкость. Для линейных асинхронных двигателей с жидким ротором недостатки из-за турбулентного течения жидкости в канале только усугубляются. [2]
Линейный асинхронный двигатель можно также выполнить в виде двух статоров, обращенных друг к другу, между которыми перемещается проводящее тело. [4]
Для линейных асинхронных двигателей с бегуном третьего типа расчет характеристик ведется, как и для управляемых асинхронных двигателей с полым немагнитным ротором, рассмотренных в гл. [5]
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и подвижной части. [7]
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фаза обмотки статор а, искажение распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и бегуне. [8]
Скольжение в линейном асинхронном двигателе: s ( Vi-Vrf / Vi, где Vi2rfi - линейная скорость бегущего поля; Vj - линейная скорость - перемещения подвижной части; т - полюсное деление. [9]
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного пассажирского транспорта на магнитном подвесе, тележек, подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте ( рис. 4.69, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. [10]
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного наземного транспорта на магнитном подвесе тележек подъемных кранов, заслонок и других линейно движущихся объектов. При использовании такого двигателя на высокоскоростном наземном транспорте ( рис. 9.16, а) статор 2 с обмоткой 3 устанавливают на движущемся экипаже 1, а ротором служит стальная полоса 5, расположенная на железнодорожном пути 4 между рельсами. [11]
Как устроен и работает линейный асинхронный двигатель. [12]
На рис. 41 показан пример использования линейных асинхронных двигателей для механизмов транспортировки грузов различных изделий. [14]
Линейные двигатели появились и в нефтяной В частности, в данной работе приводятся некоторые результата исследования воеможности применения цилиндрического линейного асинхронного двигателя / ЦЛАД / в приводе автомати8 1фО - ванного пакера предназначенного для исследования и ремонта скважин. [15]
Страницы: 1 2 3
www.ngpedia.ru
Назначение, устройство и принцип действия однофазных асинхронных двигателей
Однофазные асинхронные двигатели - машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором.
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей. выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой- выводами к зажимам с обозначениями В1 и В2 (рис. 1).
Магнитные оси этих обмоток смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая обмотка, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.

Рис. 1. Схема включения однофазного асинхронного двигателя с короткозамкнутым ротором.
Это поле можно представить двумя составляющими - одинаковыми круговыми магнитными полями прямой и обратной последовательностей, вращающимися с магнитными индукциями, вращающимися в противоположные стороны с одной и той же скоростью. Однако при предварительном разгоне ротора в необходимом направлении он при включенной рабочей фазе продолжает вращаться в том же направлении.
По этой причине пуск однофазного двигателя начинают с разгона ротора путем нажатия пусковой кнопки, вызывающего возбуждение токов в обеих фазах обмотки статора, которые сдвинуты по фазе на величину, зависящую от параметров фазосдвигающего устройства Z, выполненного в виде резистора, индуктивной катушки или конденсатора, и элементов электрических цепей, в которые входят рабочая и пусковая фазы обмотки статора. Эти токи побуждают в машине вращающееся магнитное поле с магнитной индукцией в воздушном зазоре, которая периодически и монотонно изменяется в пределах максимального и минимального значений, а конец ее вектора описывает эллипс.
Это. эллиптическое вращающееся магнитное поле находит в проводниках короткозамкнутой обмотки ротора ЭДС и токи, которые, взаимодействуя с этим полем, обеспечивают разгон ротора однофазного двигателя в направлении вращения поля, и он в.течение нескольких секунд достигает почти номинальной скорости.
Отпускание пусковой кнопки переводит электродвигатель с двухфазного режима на однофазный, поддерживаемый в дальнейшем соответствующей составляющей переменного магнитного поля, которая при своем вращении несколько опережает вращающийся ротор из-за скольжения.
Отпускание пусковой кнопки переводит электродвигатель с двухфазного режима на однофазный, поддерживаемый в дальнейшем соответствующей составляющей переменного магнитного поля, которая при своем вращении несколько опережает вращающийся ротор из-за скольжения.
Своевременное отключение пусковой фазы обмотки статора однофазного асинхронного двигателя от питающей сети необходимо в связи с ее конструктивным исполнением, предусматривающим кратковременный режим работы - обычно до 3 с, что исключает длительное пребывание ее под нагрузкой в связи с недопустимым перегревом, сгоранием изоляции и выходом из строя.
Однофазные асинхронные двигатели по сравнению с трехфазными двигателями имеют следующие недостатки:
отсутствие начального пускового момента;
малая перегрузочная способность;
более низкий КПД;
меньший коэффициент мощности (cos φ).
Линейный двигатель является электрической машиной, принцип работы которой основан на использовании энергии бегущего магнитного поля. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
Эти двигатели можно представить как разрезанную по образующей и развернутую в плоскость обычную асинхронную машину вращательного движения. Развернутый в плоскость статор асинхронного двигателя является первичным элементом, а развернутый ротор вторичным элементом линейного двигателя (рис. 1)
Принцип действия линейного двигателя подобен принципу действия асинхронного двигателя нормального исполнения. Трехфазная обмотка статора создает бегущее магнитное поле, которое индуцирует в короткозамкнутой обмотке подвижной части (бегуна) ЭДС. В результате взаимодействия тока в обмотке бегуна и магнитного поля возникают электромагнитные силы, приводящие бегун в движение.
Скольжение в линейном асинхронном двигателе s = (V1 — V2 )/V1 , где V1 = 2πf1 - линейная скорость бегущего поля; V2 - линейная скорость перемещения подвижной части; τ — полюсное деление. При номинальном режиме скольжение имеет примерно такие же значения, как и в асинхронных двигателях нормального исполнения, т. е. скорость V2 перемещения подвижной части близка к V1 .
В линейном асинхронном двигателе возникают краевые эффекты, обусловленные тем, что его статор не замкнут в кольцо и имеет конечную длину. В результате этого кроме основного магнитного бегущего поля возникает пульсирующее поле, которое можно представить в виде прямого и обратного бегущих полей. Обратное поле создает паразитные тормозные силы, вызывает неравномерное распределение тока в фазах обмотки статора, искажение распределения магнитного поля в воздушном зазоре, дополнительные потери мощности в статоре и подвижной части. Поэтому энергетические и тяговые показатели линейных двигателей хуже, чем у асинхронных двигателей нормального исполнения.
Особенно низкие энергетические показатели получаются при большом воздушном зазоре между статором и ротором. Например, в линейном двигателе, предназначенном для транспортных устройств, из-за большого зазора (около 50 мм) резко возрастает ток холостого хода, при этом КПД и коэффициент мощности составляют 0,2—0,3, а энергетический фактор А = η cos φ < 0,1.
В настоящее время линейные асинхронные двигатели используют для привода в движение экипажей высокоскоростного пассажирского транспорта на магнитном подвесе, тележек, подъемных кранов, заслонок и других линейно движущихся объектов.
ДополнительноВ некоторых случаях линейные двигатели применяют в металлообрабатывающих станках для получения возвратнопоступательного перемещения элементов станка путем периодического изменения чередования фаз обмотки статора двигателя. Однако при этом возникают довольно значительные потери мощности из-за того, что часть кинетической энергии подвижного элемента станка бесполезно теряется в каждом цикле ускорения и замедления. Кроме того, существенно увеличивается общая масса этого элемента за счет сочлененной с ней подвижной части линейного двигателя.
studfiles.net
Линейные асинхронные двигатели отличаются конструктивной простотой, надёжностью, возможностью получения большого диапазона линейных скоростей и перемещений без использования сложных кинематических связей и передающих механизмов. К их достоинствам следует отнести также отсутствие электрического контакта со вторичным элементом. Эти положительные стороны ЛАД способствовали разработке и созданию большого количества линейных электроприводов различных промышленных механизмов.
Удачно спроектированный линейный электродвигатель является неотъемлемой частью производственного механизма, накладывающего конкретные требования на его конструктивное исполнение. В связи с этим во многих практических случаях применение линейного электропривода требует практически новых проектных разработок всего производственного механизма. Поэтому к проектированию линейного электродвигателя следует подходить индивидуально для каждой промышленной установки с учётом её конструктивных особенностей и предъявляемых к линейному электроприводу требований.
В настоящее время существует множество конструктивных разновидностей ЛАД, вызванных необходимостью разрабатывать и конструировать линейный двигатель как элемент электромеханической системы, преобразующий электрическую энергию в механическую.
По конструктивным признакам и особенностям физических явлений ЛАД подразделяются на две основные группы: с поперечным и аксиальным потоком.
При индивидуальном проектировании ЛАД для множества установок требуется большое количество конструктивных исполнений ЛАД.
Применение составных и комбинированных вторичных элементов, собранных из ферромагнитных и неферромагнитных участков, обмотанных вторичных элементов, электрические параметры которых могу быть неизменные или изменяемые, в сочетании с геометрическими параметрами бегуна, которые в свою очередь могут быть как постоянные, так и переменные, позволяют формировать требуемые характеристики линейных двигателей и тем самым способствуют упрощению и сведению к минимальному количеству элементов схемы управления электропривода.
Продольные краевые эффекты, вызванные конечной длиной машины, проявляются как в плоских, так и в цилиндрических двигателях. Они обуславливаются физической природой двигателя и не могут быть полностью подавлены. Вследствие разомкнутости магнитопровода в воздушном зазоре линейного двигателя появляются пульсирующие составляющие индукции. Это явление принято называть первичным продольным краевым эффектом (ПКЭ). Пульсирующие составляющие создают дополнительные потери, искажают симметрию фазных токов. Во многих случаях дополнительные зубцы, стальные крышки индуктора позволяют снизить влияние первичного ПКЭ. Экспериментальные исследования показывают, что фазные токи в обмотках отличаются не более, чем на 2% и первичным ПКЭ можно пренебречь. Это обстоятельство существенно упрощает разработку двигателей такого типа и приводов с ними.
Характерной особенностью плоских линейных машин является также наличие у них поперечного краевого эффекта, вызванного конечной шириной машины. Наводимые во вторичном элементе токи протекают по замкнутым кольцевидным контурам. Токи, протекающие во вторичном элементе в направлении бегущего магнитного поля или в противоположном направлении, не создают полезного усилия, направленного в сторону бегущего поля, а обуславливают только возникновение поперечных усилий. Наличие этих составляющих тока увеличивает длину линий тока, а тем самым и сопротивление вторичного элемента, что приводит к уменьшению развиваемого усилия. Одновременно увеличивается величина электрических потерь во вторичном элементе. Исследованию поперечного краевого эффекта посвящены работы.
Различают вторичный ПКЭ, связанный с процессом входа и выхода вторичного элемента в активную зону .двигателя. Физическая природа вторичного ПКЭ связана с размагничиванием индуктора во входном конце и увеличении индукции на выходном конце. Исследование электромагнитного поля показывает, что в воздушном зазоре ЛАД кроме бегущей составляющей магнитного поля появляются дополнительные две прямобегущие и две обратнобегущие магнитные волны поля с убывающей амплитудой, которые создают дополнительные потери, снижают развиваемое усилие.
В высокоскоростных ЛАД оно настолько уменьшает развиваемое усилие, что без дополнительных мер по устранению вторичного ПКЭ они оказываются неработоспособными. Для двигателей средней мощности с одной парой полюсов развиваемое усилие под действием вторичного ПКЭ в рабочей точке уменьшается на 30%, что указывает на необходимость его учёта при разработке конструкции двигателя.
Вследствие того, что первичный краевой эффект незначительно влияет на характеристики ЛАД, вторичный ПКЭ в литературе часто называется просто продольным краевым эффектом. В дальнейшем будем придерживаться этого названия.
Скорость бегущего магнитного поля в ЛАД равна синхронной скорости вторичного элемента
У0=2тА> 1 где т - полюсное деление; fi — частота.
Теоретически согласно (1) заданием соответствующей частоты при принятом полюсном делении т возможно получить любую скорость движения бегущего электромагнитного поля. Но здесь возникают трудности технического исполнения ЛАД. Например, для промышленной частоты 50 Гц технологически трудно изготовить с достаточно высокими энергетическими и весовыми показателями ЛАД на скорость движения меньше 5 м/с. Технически трудно и нерационально для частоты 50 Гц изготавливать ЛАД на скорости движения 30 м/с. В этом случае получается большая длина полюсного деления, которая приводит к перерасходу обмоточного материала при изготовлении индуктора, а также вторичного элемента.
Таким образом, при заданном значении т для каждой скорости движения имеет место своя оптимальная частота питающих токов. В зависимости от скорости движения подвижного элемента все ЛАД подразделяют на три группы: быстроходные ЛАД, скорость движения более 30 м/с, частота питания 100-300 Гц, ЛАД средней быстроходности - скорость движения 5-30 м/с, частота питания 50 Гц; тихоходные ЛАД — скорость движения менее 5 м/с , частота питания 5-25 Гц. При промышленной частоте fi = 50 Гц без дополнительной аппаратуры возможно получение лишь значительных скоростей перемещения бегущего поля. Использование преобразователей частоты для получения меньшей скорости ведет к удорожанию линейного привода. Оно более целесообразно лишь при одновременном питании ряда приводов или для приводов значительной мощности. Однако в ряде случаев спроектировать электропривод с линейными двигателем бы преобразователя не представляется возможным .
Одним из направлений выполненных исследований является определение рациональных областей практического применения разрабатываемых ЛАД. Теоретически обосновано разделение ЛАД на две группы: высокоскоростные и тихоходные. При промышленной частоте качественная граница между высокоскоростными и тихоходными двигателями проходит там, где полюсное деление составляет примерно 0,03 м, а синхронная скорость -3 м/с. Большинство ЛАД промышленных установок в соответствии с требованиями технологического процесса или по условиям безопасной работы должны иметь рабочие скорости меньше 3 м/с. Это требование относится к электроприводам электротермических установок: толкателей, выталкивателей, таскателей, механизмов открывания и закрывания дверей, а также отдельных механизмов гибкого автоматизированного производства (кантователей, сбрасывателей). Полюсные деления меньше 0,03 м при трехфазной обмотке и нормальной зубцово-пазовой структуре изготовить весьма трудно. Рабочие скорости движения (0,02 - 2 м/с) обеспечиваются путём снижения частоты или при работе ЛАД при больших скольжениях, ( при увеличении потерь во вторичном элементе), а также путем изменения напряжения или частоты.
Проведенный обзор линейных электроприводов показывает многообразие различных технических решений и предпочтительность индивидуального подхода к разработке линейных электродвигателей, т.е. двигатель должен разрабатываться для каждого конкретного промышленного механизма с учетом требований, предъявляемых к электроприводу. Только при таком решении проблемы проявляются быстродействие, минимальные массогабаритные показатели механизма, экономия материалов и электроэнергии. Важной задачей, позволяющей повысить тиражи выпуска ЛАД, что без сомнения снижает их стоимость, является определение того класса механизмов, распространение которых в промышленности достаточно высокое.
Имеется целый класс механизмов металлургического производства, которые перемещаются с одинаковыми скоростями и обеспечивают примерно одинаковы тяговые усилия. К ним можно отнести : Линейный асинхронный позиционный привод ЗВМ кольцевой нагревательной печи. Линейный асинхронный позиционный электропривод механизма перемещения упорного подшипника стана, линейный асинхронный позиционный электропривод механизма перемещения стержня с оправкой прошивного стана ТПА.
Сравним некоторые модификации приводов для механизмов перемещения.
Таблица 1.
Технические Характеристики различных модификаций механизмов перемещения упорных подшипников прошивных станов
Наименование Электромеханический привод Пневматический привод Линейный электропривод
1 2 3 4
Число циклов в час 127,0 132,0 144,0
Время цикла, с 28,346 27,273 25,0
1 2 3 4
Время транспортирования заготовки от печи до зацент-ка, с 19,9 19,9 19,9
Время центрования заготовки, с 7,2 7,2 7,2
Время сбоса заготовки на наклонную решетку, с 4,3 4,3 4,3
Время скатывания по решете, с 4,8 4,8 4,8
Время задачи заготовки в валки, с 1,3 1,3 1,3
Время прошивки, с 15,4 15,4 15,4
Время отвода стержня, с 4,15 3,5 2,5
Ускорение, замедление, м/с 6,0 5,0 10,0
Скорость максимальная, м/с 3,0 4,75 6,0
Путь максимальный, м 11,0 11,0 11,0 на опорах качения, м 10,0 10,0 — на опорах скольжения, м 1,0 1,0 —
Коэффициент трения: на опорах качения од 0,12 — на опорах скольжения 0,2 0,21 0,20
Масса перемещаемая, кг 6900,0 3900,0 4000,0
Время разгона, с 0,5 0,95 0,605
Время торможения, с 0,6 1,0 0,7
Время движения с постоянной скоростью, с 3,0 1,6 1,2
Время выброса гильзы, с 2,1 2,1 2,1
Время подвода стержня и закрытия центрователей, с 5,4 4,8 3,5
Разброс времени работы механизмов по различным причинам, с 0,0 0,172 0,190
Среднее значение к.п.д. 0,55 0,6 0,4
Энергетические затраты за час работы,
МДж 28,679 21,450 78,800
Энергетические затраты на одну гильзу, кДж 225,8 162,5 533,3
Производительность, % 100,0 103,937 113,386
Из сравнения трех вариантов приводов по показателей предпочтительным оказывается вариант с линейным двигателями.
Рассмотрим, Линейный асинхронный позиционный привод кольцевой нагревательной печи, который характеризуется следующими основными параметрами.
Масса подвижной части, кг - около 6000 (т) Скорость передвижения максимальная, м/сек - 5 (Утр)
Максимальный путь перемещения - 6 м ( L )
2 Максимальное ускорение - 8 м/сек (а )
Производительность, не менее - 450 шт/час (Q) Максимальное тяговое усилие, развиваемое ЛАД и приложенное к подвижной части ЗВМ - 50x103 Н (F)
Примерно такие же параметры имеют и другие механизмы металлургического производств; что даёт основание рассматривать их как определенный класс.
Рассмотрим некоторые динамические свойства для линейного двигателя кольцевой нагревательной печи. На рис. 1 , приводится диаграмма передвижения этого механизма, из которой следует:
5м1сек=0М5сек а 8 м! сек г м
L сек f
5" 4н 3 2Н 1 О
12345"
Вперед" д ^Р ^ I j ^V ^ I j
0,6
0,6
0,6
0,6
Назад"
1ц =7,65 сек t I сек 1
Рис. 1. График скоростей перемещения машины за цикл работы
Путь, проходимый ЗВМ за время разгона и торможения (переходные процессы):
Ln=L+Lt = — + — = at = 8x0,625 = 3,12
7/7 2 2
Путь, проходимый ЗВМ с установившейся скоростью: tv =L-Lnn =6-3,12 = 2,88m
Машинное время цикла (т.е. без учета пауз):
L 2 88 t =4t +2-^ = 4x0,625+2—2— = 3,65сек
ЦМ Р тг 7 с 7 шр J
Время цикла: и = 'им +'в = 3,65 + 4 = 7, вЪсек где -tB - время работы пневмоприводов клещей и качения хобота (принято 4 сек).
Производительность (число загружаемых и выгружаемых заготовок):
Wn = hYitL==75х10з
Средняя мощность за время разгона или торможения: Wn 75х103 „
Р = —=-= 120кВт tp 0,625
Мощность, затрачиваемая на преодоление статических сил сопротивления:
Рс = Fc х Vmp = 1,765 х 103 х 5 = 8,83 х 103 дж/с = 9 кВт
Где: Fc = 0,15 х m х g = 0,015 х 12 х 103 9,81 = 1,765 х 103 Н,
Fc - сила статического сопротивления. Как видно, статическая мощность незначительна по сравнению с динамической. Энергия, затраченная на пуск, частично рекуперируется в сеть при торможении. Полная подводимая мощность:
Р 120
N = —-— = —— = 400кВА. cos ф 0,3 где соэф = 0,3 (для линейного асинхронного двигателя).
Двигатель и преобразователь должны быть рассчитаны на потребляемую мощность 400 кВА, необходимую для ускорения и замедления привода в заданное время.
Расход электроэнергии при работе 7000 часов в год составит:
А = (к х Р + Рс) х 7000 = (0,6 х 120 + 9) х 7000 = 0,567 х 103 кВтч/год. где к = 0,6 - коэффициент, учитывающий рекуперацию ,. энергии при торможении.
Тяговое усилие ЛАД:
F = m х а = 6 х 103 х 8 = 48 х 103 Н или F ~ 50 кН.
Для того чтобы спроектировать линейный двигатель быстродействующих механизмов металлургического производства необходимо решить следующие задачи:
1. Создать методики проектирования, позволяющие определить главные размеры и рассчитать параметры схемы замещения линейного асинхронного двигателя (ЛАД).
2. Рассчитать характеристики и выбрать конструкцию вторичного элемента ЛАД.
3. Выбрать материал вторичного элемента а также оптимальное соотношение толщин массивного слоя ротора и проводящего слоя.
4. Исследовать зависимость тягового усилия от добротности.
5. Показать распределение электромагнитного поля в зазоре с учетом краевых эффектов.
6. Исследовать динамические режимы работы ЛАД.
www.dissercat.com


И. Станкевич
Обычно о том, какие электродвигатели стоят на том или ином оборудовании, его владельцы особенно не задумываются, но только до тех пор, пока они не выходят из строя. А уже первые «болезни» этих «скромных тружеников» вызывают коллапс необъятных потоков грузов. На склады России поступает много иностранного подъемно-транспортного оборудования, и читателям будет интересно узнать, какие существуют типы и исполнения электродвигателей, работающих в этих машинах и механизмах.

Электродвигатели – непременная составляющая подъемно-транспортного и автоматизированного оборудования: конвейеров, автоматизированных складов, штабелеров, упаковочных автоматов и иной складской техники. Обычно эти агрегаты подбирают для своего оборудования сами изготовители, но все чаще бывает так, что покупатели и владельцы машин сами могут выбирать электрические силовые агрегаты для нужд своего предприятия в зависимости, например, от специфики условий работы отдельных его участков. В некоторых случаях компании комплектуют электродвигателями одного типа технику на всех своих складах и предприятиях, чтобы за счет унификации процедур и запчастей сократить расходы на техобслуживание. Иногда электродвигатели выбирают по соображениям невысокой стоимости.
В складском и подъемно-транспортном оборудовании наиболее широко применяют электродвигатели пяти типов:

Асинхронные двигатели переменного тока проще и дешевле электродвигателей других типов, поэтому в настоящее время их применяют все чаще. При выборе асинхронного двигателя следует учитывать два фактора – к.п.д. преобразования энергии и тип исполнения агрегата.
К.п.д. В ряде стран законодательством установлена минимальная величина к.п.д. для электродвигателей приводов, однако многие производители изготавливают электродвигатели по более жестким стандартам Национальной ассоциации производителей электрооборудования США (NEMA). Если, выбирая электродвигатель, вы видите, что он соответствует стандарту NEMA Premium, то это гарантирует его высокий к.п.д., надежность и экономичность.
У электродвигателей обычного качества к.п.д. равен 75...85%, у агрегатов высшего качества – 85...95%. Как считают специалисты, агрегаты с высоким к.п.д. стоят намного дороже обычных, но если электродвигатель будет работать непрерывно, он окупится быстро. Кроме того, благодаря экономии энергии улучшается экологическая обстановка, на которую все больше обращают внимание в цивилизованных государствах.

Тип исполнения – важная характеристика при выборе электродвигателя. Существует пять основных исполнений асинхронных электродвигателей:
• ODP (Open drip proof) – «каплезащищенный электродвигатель открытого исполнения». Этот тип электродвигателей наиболее широко используют в промышленности. Они не оборудованы вентилятором и имеют проемы в корпусе, через которые внутрь может проникнуть грязь и влага, поэтому использовать такие электродвигатели рекомендуется только в закрытых помещениях;
• TEFC (Totally Enclosed Fan Cooled) – «закрытого типа с вентиляторным охлаждением». Эти двигатели оборудованы вентилятором, создающим поток воздуха через их корпус. Вентилятор герметизирован, и инородные частицы и жидкости не могут проникнуть в электродвигатель извне. Электродвигатели в исполнении TEFC часто применяют в конвейерах;
• TENV (Totally Enclosed Non-Ventilated Motor) – «закрытого типа без охлаждения». Эти электродвигатели также используются в подъемно-транспортном оборудовании складов, если есть внешний источник, создающий воздушный поток для охлаждения двигателя;
• TEBC (Totally Enclosed Blower-Cooled Motor) – «охлаждаемый обдувом». Эти двигатели комплектуют собственным вентилятором, но расположенным и управляемым снаружи. Электродвигатели типа TEBC обычно применяют в оборудовании высокой мощности: в подъемных кранах, лебедках и т. п. или в оборудовании, работающем с переменной скоростью, где электродвигатель иногда может работать с частотой вращения, близкой к нулю;
• EPFC (Explosion Proof Fan Cooled Motor) – «во взрывозащищенном исполнении с вентиляторным охлаждением». Используются в условиях высокого содержания в воздухе горючих и взрывоопасных элементов, например, паров бензина, других нефтепродуктов, аммиака, угольной пыли и проч.
Возможности применения любого асинхронного электродвигателя расширяются благодаря использованию электропривода с частотным регулированием (VFD). Асинхронные электродвигатели традиционной конструкции работают с постоянной частотой. Электропривод с частотным регулированием позволяет менять скорость двигателя и всей машины. В складском подъемно-транспортном оборудовании электроприводы с частотным регулированием позволяют максимально увеличивать скорость в «пиковые» периоды работы и снижать в другое время, благодаря чему экономится энергия и средства.


Эти двигатели занимают свою особую нишу – они работают в оборудовании, где требуется точное регулирование положения и скорости движений. Эти устройства специально разработаны как электродвигатели с якорем малого диаметра, но развивающие высокий крутящий момент. Чем меньше якорь, тем меньше инерция и, следовательно, электродвигатель быстрее разгоняется, и машина работает быстрее.
Серводвигатели оснащают также системами управления по обратной связи: по сигналам тахометра, датчиков линейных перемещений и аналого-цифрового преобразователя (АЦП). Благодаря управлению по сигналам от этих приборов увеличивается точность движений и регулирования скорости машин. Серводвигатели применяют в оборудовании и системах, где требуется высокая точность движений: в роботизированном оборудовании, штабелерах и подобных складских машинах. Электродвигатели этого типа применяют также в оборудовании и системах, где необходима большая точность синхронизации – в машинах, выполняющих установку (позиционирование) грузов на стеллажах автоматизированных складов.

Линейные асинхронные электродвигатели – новинка в отрасли складского подъемно-транспортного оборудования. Они позволяют значительно увеличить скорость движений машин при замечательной их повторяемости и точности. Линейный асинхронный двигатель генерирует магнитное поле, которое перемещает ползун (пластину) в двигателе. Обычно ползун прикрепляется к объекту, который должен передвигаться магнитным полем: например, в сортировочных машинах ползун электродвигателя соединен с подвижным лотком распределителя.
В такой конструкции нет деталей, которые бы изнашивались. Линейные асинхронные электродвигатели обеспечивают точность движений до 0,0335 мм на 1 м перемещения, т. е. позволяют выполнять прецизионные работы. Насколько уникальна такая способность устройств, иллюстрирует тот факт, что толщина человеческого волоса составляет около 0,09 мм, т. е. в три раза больше! Скорость работы линейных асинхронных электродвигателей очень высокая – до 5 м/с, а следовательно, длительность рабочих циклов у них небольшая и производительность на высочайшем уровне. Скорость перемещения ползуна на разных отрезках в течение одного цикла можно менять, а можно задавать пошаговое перемещение – это очень полезное качество для некоторых автоматических машин.

Линейные асинхронные электродвигатели – не единственная инновация в области электрических силовых агрегатов. В последнее время в конвейерах все шире стали применять мотор-ролики (MDR – Motor Driven Roller). Еще два года назад на выставке оборудования по транспортировке материалов и логистике ProMat в Чикаго лишь несколько фирм представили конвейеры с приводом от мотор-роликов, зато в экспозиции в январе 2007 г. в ассортименте почти каждой фирмы, предлагающей конвейеры, были модели с мотор-роликами.

В Соединенных Штатах конвейеры с приводом от мотор-роликов впервые использовала почтовая служба. Конструкция их проста. Внутри ведущего ролика устанавливается миниатюрный электродвигатель постоянного тока, работающий от напряжения 24 В, и редуктор. В обычных конвейерах один мотор-ролик приходится на 9 обычных роликов.
По словам специалистов, если конвейер перемещает грузы непрерывным потоком, привод от наружных электродвигателей более экономичен. Конвейеры с мотор-роликами рентабельны и используются в основном в тех случаях, когда надо накапливать поступающие грузы на конвейере, а затем перемещать их дальше либо когда требуется разделять поток грузов на группы и перемещать грузы группами.
У мотор-роликов целый «букет» преимуществ. Уровень шума от конвейеров, оснащенных мотор-роликами, значительно ниже, чем от обычных конвейеров. Они позволяют экономить энергию: не только благодаря более высокому к.п.д. мотор-роликов, но и потому, что конвейер работает только тогда, когда надо. Еще одно преимущество – более высокий уровень систем управления мотор-роликами. В настоящее время выпускаются конвейеры с мотор-роликами, развивающие скорость до 90 м/мин, а если поток грузов уменьшился, можно снизить скорость до 30 м/мин, уменьшив таким образом износ деталей конвейера и энергопотребление. Наконец, мотор-ролик практически не нуждается в техобслуживании. Поскольку он работает лишь тогда, когда надо, его ресурс продляется на годы. Когда электродвигатель выйдет из строя, мотор-ролик заменяют другим практически без остановки конвейера.


sitmag.ru
16.12.2014
Рахимов Андрей Валерьевич
студент Электроэнергетического факультета Ставропольский государственный аграрный университет г. Ставрополь, Россия
Аннотация: В статье рассматривается актуальность внедрения линейных электродвигателей в современные технологические процессы, раскрываются достоинства и недостатки данных электрических машин, приводятся примеры использования линейных электродвигателей.
Ключевые слова: Линейный электродвигатель, электрическая машина, магнитная система, обмотка, статор, механическая передача
Линейным электродвигателем называется электрический двигатель с одним разомкнутым элементом магнитной системы, обмотка которого развернута. Обмотка создает магнитное поле, с которым взаимодействует второй элемент магнитной системы, выполненный как направляющая деталь, обеспечивающая перемещение подвижной части линейного электродвигателя [1]. Если провести классификацию конструкций линейных электродвигателей, то можно выделить несколько типов. Основные из них – синхронные, асинхронные, электромагнитные, магнитоэлектрические, магнитострикционные и пьезоэлектрические линейные двигатели [3, 7]. По принципу действия они схожи с электродвигателями, создающими вращательное движение. В основном это синхронные, асинхронные и линейные электродвигатели постоянного тока. В линейном электродвигателе существует две части: первичная – неподвижная, получившая название «статор», и вторичная – подвижная, получившая название «якорь». Якорь электродвигателя получает энергию от статора через магнитное поле.
, 2 ротор (реактивная полоса)")
Рисунок 1 - Условная схема преобразования обычного электродвигателя в линейный:
1 –статор (индуктор), 2 ротор (реактивная полоса)
Линейный электродвигатель является основной частью прямого электропривода. Он создан для преобразования электрической энергии в энергию поступательного движения, т. е. без механической передачи. Такой электропривод состоит из средств управления и изменения скорости, что значительно упрощает конструкцию исполнительных органов и позволяет усовершенствовать различные технологические процессы [6, 8]. В линейном электродвигателе имеется, питаемый электрическим током, индуктор, который является первичным элементом, и специальная реактивная полоса – вторичный элемент (рисунок 1). Эти элементы отделены воздушным зазором. Магнитная система линейного электродвигателя представлена обмоткой определенной длинны, которая необходима для создания движущегося вдоль нее магнитного поля. Это и есть неподвижный элемент. Подвижный элемент благодаря взаимодействию с магнитным полем, перемещается вдоль обмотки.
Линейные электродвигатели подразделяются на асинхронные и синхронные. В асинхронном линейном электродвигателе реактивная полоса, выполненная в виде бруска прямоугольного сечения без обмоток, закрепленная вдоль путепровода, над которым перемещается электровоз, перемещающий подвижную часть (индуктор) двигателя. Его магнитопровод выполнен с развернутыми многофазными обмотками, питаемыми от источника переменного тока. Благодаря взаимодействию магнитного поля индуктора с полем реактивной полосы, возникают силы, заставляющие перемещаться с ускорением индуктор относительно неподвижной реактивной полосы. Это перемещение происходит до тех пор, пока скорости перемещения индуктора и бегущего магнитного поля реактивной полосы не сравняются. Преимуществом такой конструкции является размещение более простой в изготовлении реактивной полосы.
Основные достоинства линейного электропривода – это отсутствие механической передачи и вращающихся частей, простота в эксплуатации, большой технический ресурс. К основным недостаткам можно отнести сложность устройства и высокую стоимость изготовления, плохие энергетические показатели, связанные с наличием больших воздушных зазоров в магнитной цепи и ее разомкнутостью.
Наиболее часто используются линейные двигатели в электрическом транспорте. Этому способствует ряд преимуществ. Прямолинейный характер движения подвижной части, подходящий для движения различных транспортных средств. Энергия магнитного поля непосредственно преобразуется в механическую, что позволяет добиться высокого КПД. Важное преимущество линейных электродвигателей состоит в независимости силы тяги от силы сцепления колес с путем. Это невозможно для обычных систем электрической тяги. Благодаря использованию линейных электродвигателей проскальзывание колес исключается, а скорости движения транспорта могут быть довольно высокими и ограничиваются лишь комфортабельностью движения, максимально допустимой скоростью вращения колес, и динамической устойчивостью транспорта и пути.
В приводе механизмов транспортировки грузов различных изделий также применяются линейные асинхронные двигатели. Как правило, это конвейеры, имеющие ленту из металла, которая проходит внутри статоров линейного двигателя, являясь при этом вторичным элементом. Использование линейного электродвигателя позволяет снизить предварительное натяжение ленты и устранить ее проскальзывание, повысить скорость и надежность работы конвейера.
В сваезабивных молотах, используемых при дорожных работах или строительстве, также применяется линейный электропривод. Статор электродвигателя перемещается вдоль стрелы в вертикальном направлении при помощи лебедки. Ударная часть молота является одновременно вторичным элементом двигателя. Для ее подъема двигатель включается таким образом, чтобы бегущее поле было направлено вверх. Когда ударная часть поднимется к крайнему верхнему положению, двигатель отключается, и она опускается вниз на сваю под действием силы тяжести. Иногда двигатель не отключается, а реверсируется, это позволяет увеличить ударную энергию. При заглублении сваи статор двигателя перемещается вниз с помощью лебедки. Электрический молот прост в изготовлении, не требует повышенной точности изготовления деталей, нечувствителен к изменению температуры и может вступать в работу практически мгновенно.
Благодаря появлению линейных электродвигателей, усовершенствованы многие технологические процессы, начиная от создания нового вида гидравлических насосов и заканчивая усовершенствованием машинного доения животных [2, 4, 5]. Развитие науки и техники позволяет упростить выполнение технологических процессов и в конечном итоге снизить издержки производства, что необходимо для повышения конкурентоспособности отечественных производителей товаров.
Список литературы:
2014 © Рахимов А.В.
nauka-rastudent.ru
 Лабораторный синхронный линейный двигатель. На заднем плане статор - ряд индукционных катушек, на переднем плане - подвижный вторичный элемент, содержащий постоянный магнит.
Лабораторный синхронный линейный двигатель. На заднем плане статор - ряд индукционных катушек, на переднем плане - подвижный вторичный элемент, содержащий постоянный магнит. 
Лине́йный дви́гатель — электродвигатель, у которого один из элементов магнитной системы разомкнут и имеет развёрнутую обмотку, создающую магнитное поле, а другой взаимодействует с ним и выполнен в виде направляющей, обеспечивающей линейное перемещение подвижной части двигателя. Сейчас разработано множество разновидностей (типов) линейных электродвигателей, например:
Многие типы линейных двигателей, такие как асинхронные, синхронные или постоянного тока, повторяют по принципу своего действия соответствующие двигатели вращательного движения, в то время как другие типы линейных двигателей (магнитострикционные, пьезоэлектрические и др.) не имеют практического исполнения как двигатели вращательного движения. Неподвижную часть линейного электродвигателя, получающую электроэнергию из сети, называют статором, или первичным элементом, а часть двигателя, получающая энергию от статора, называют вторичным элементом или якорем (название «ротор» к деталям линейного двигателя не применяется, так как слово «ротор» буквально означает «вращающийся», а в линейном двигателе вращения нет).
Наибольшее распространение в транспорте и для больших линейных перемещений получили асинхронные и синхронные линейные двигатели, но применяются также линейные двигатели постоянного тока и линейные электромагнитные двигатели. Последние чаще всего используются для получения небольших перемещений рабочих органов и обеспечения при этом высокой точности и значительных тяговых усилий.
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока, то образуется магнитное поле, ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца, в направлении перемещения магнитного поля. Ротор — в дальнейшем будем называть его уже вторичным элементом — под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V - v)/V, где v — скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%.[1] Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей лине
ru-wiki.ru









