Использование асинхронного двигателя в регулируемом электроприводе представляет особый интерес, т.к. АД является наиболее простым, дешевым и надежным двигателем. Возможности его регулирования, аналогичные возможностям регулирования ДНВ изменением напряжения на якоре, обеспечиваются изменением частоты напряжения и тока статорной обмотки. Для реализации этой возможности питание двигателя необходимо осуществлять от управляемого преобразователя частоты.
В качестве преобразователей частоты могут использоваться электромашинные и статические преобразователи. К электромашинным преобразователям относятся синхронные генераторы, приводимые во вращение регулируемым двигателем постоянного тока, и асинхронные преобразователи частоты, вращаемые к.з. АД. К статическим преобразователям относятся тиристорные преобразователи, выполняемые на базе автономных инверторов напряжения и тока, а также преобразователи, выполненные на базе силовых транзисторов.
При частотном управлении АД возникает необходимость, как отмечено ранее при рассмотрении электромеханических свойств АД, регулировать не только частоту, но и величину подводимого напряжения, причем напряжение регулируется не только в функции частоты, но ещё и в функции нагрузки двигателя. Регулирование напряжения только в функции частоты с учетом характеристик механизма может быть реализовано в разомкнутых системах частотного управления. Регулирование напряжения в функции частоты и нагрузки можно осуществить лишь в замкнутых системах.
Верхний предел регулирования частоты, следовательно, скорости АД, ограничивается прочностью крепления обмоток ротора и заметным увеличением потерь в стали статора. Нижний предел ограничен сложностью реализации источника питания с низкой частотой и возможностью неравномерности вращения двигателя. Как правило, напряжение при частотном управлении регулируется лишь вниз по отношению к номинальному, а частота вверх и вниз по отношению к основной.
При выборе соотношения между частотой и напряжением, подводимым к статору АД, чаще всего исходят из условия сохранения перегрузочной способности двигателя для любой из его регулировочных механических характеристик. Основной закон частотного регулирования (закон Костенко), известный ещё из курса электрических машин, в математической форме имеет вид
 , где
, где
МС и М’C -статические моменты сопротивления соответствующие скорости двигателя при частотах f1 и f’1.
U1 и U’1 -соответствующие частотам f1 и f’1 напряжения.
В относительных единицах этот закон запишется так:
 , где
, где 
Из него следует, что закон изменения напряжения определяется не только частотой источника питания, но и характером изменения момента сопротивления механизма на валу двигателя при изменении угловой скорости.
Согласно формуле Бланка 
или в относительных единицах 
Учитывая, что  , а
, а , можно написать
, можно написать

Тогда основной закон после подстановки в формулу 
значения C , будет иметь вид: 
При постоянном моменте на валу двигателя МС
(следовательно и С ) не зависит от скорости, а значит и частоты. Поэтому х=0 и

 или
или
 , а в именованных единицах
, а в именованных единицах 
П олученный закон – это закон пропорционального управления. Механические характеристики двигателя при этом законе изображены на рисунке. Жесткость характеристик сохраняется сравнительно высокой. Критический момент в зоне частот, близких к основной, практически остается неизменной. Однако при значительном снижении чистоты (ниже 0,5f1H ) сопротивление
олученный закон – это закон пропорционального управления. Механические характеристики двигателя при этом законе изображены на рисунке. Жесткость характеристик сохраняется сравнительно высокой. Критический момент в зоне частот, близких к основной, практически остается неизменной. Однако при значительном снижении чистоты (ниже 0,5f1H ) сопротивление  становится соизмеримым по величине с сопротивлением r1 статора или даже меньше его. Влияние падения напряжения на r1 становится весьма заметным, к намагничивающей цепи двигателя подводится тем меньшее напряжение, чем меньше частота. Это вызывает уменьшение критического момента, следовательно, перегрузочной способности двигателя.
становится соизмеримым по величине с сопротивлением r1 статора или даже меньше его. Влияние падения напряжения на r1 становится весьма заметным, к намагничивающей цепи двигателя подводится тем меньшее напряжение, чем меньше частота. Это вызывает уменьшение критического момента, следовательно, перегрузочной способности двигателя.
Плавное регулирование до f1=0 при этом законе невозможно. Невозможно также обеспечить устойчивую работу двигателя при Мс=const в широком диапазоне регулирования частоты.
Закон пропорционального регулирования можно легко реализовать при разомкнутой системе, Этот закон целесообразен только для крупных АД, а для мелких, маломощных он малоэффективен , т.к. уже при 1<0,5 перегрузочная способность двигателя заметно снижается (у них большое r1). Потери в двигателе больше, чем при основном законе.
При идеальном вентиляторном моменте сопротивления x=2 , 0=0 и

 или
или 
М еханические характеристики при этом законе изображены на рис. При постоянной мощности статической нагрузки РС=const
еханические характеристики при этом законе изображены на рис. При постоянной мощности статической нагрузки РС=const  или
или  : В этом случае Х=-1 Приняв 0=0, получим закон управления
: В этом случае Х=-1 Приняв 0=0, получим закон управления
 или
или 
Механические характеристики при этом законе имеют вид, изображенный на р исунке. Возможны также законы, обеспечивающие постоянство потокосцеплений статора S=const, ротора r=const, взаимного потокосцепления статора и ротора m=const. Возможен закон поддержания относительной частоты тока ротора (=const), абсолютной частоты тока ротора (f2=const), закон управления по ЭДС и моменту
исунке. Возможны также законы, обеспечивающие постоянство потокосцеплений статора S=const, ротора r=const, взаимного потокосцепления статора и ротора m=const. Возможен закон поддержания относительной частоты тока ротора (=const), абсолютной частоты тока ротора (f2=const), закон управления по ЭДС и моменту
 или
или 
studfiles.net
Амплитудное управление
Амплитудное управление возможно такими АД, которые имеют "мягкую" механическую характеристику и при наличии обратной связи по скорости, как показано на рис. 1-24.
В данной схеме вентильный преобразователь ВП меняет величину напряжения U, подаваемого на двигатель, в зависимости от управляющего сигнала Uу, поступающего от операционного усилителя ОУ. ОУ меняет Uу так, чтобы напряжения на его входах были равны, т.е. ωз =ω. Таким образом, как показано на рис. 1-25, в некотором диапазоне нагрузок М рабочая точка переходит с одной характеристики на другую из-за изменения напряжения U, что приводит к поддержанию постоянной частоты вращения равной заданной, т.е. характеристики становятся достаточно жесткими, а двигатель управляемым.
данной схеме вентильный преобразователь ВП меняет величину напряжения U, подаваемого на двигатель, в зависимости от управляющего сигнала Uу, поступающего от операционного усилителя ОУ. ОУ меняет Uу так, чтобы напряжения на его входах были равны, т.е. ωз =ω. Таким образом, как показано на рис. 1-25, в некотором диапазоне нагрузок М рабочая точка переходит с одной характеристики на другую из-за изменения напряжения U, что приводит к поддержанию постоянной частоты вращения равной заданной, т.е. характеристики становятся достаточно жесткими, а двигатель управляемым.
 Частотное управление.
Частотное управление.
С истема частотного управления АД показана на рис. 1-26.
истема частотного управления АД показана на рис. 1-26.
Она применяется для управления двигателями с "жесткой" характеристикой. Здесь меняется частота питания f, с помощью автономного инвертора АИ, и амплитуда напряжения U, с помощью управляемого выпрямителя УВ под управлением управляющего устройства УУ в зависимости от задаваемой частоты вращения ωз.
Вид механических характеристик двигателя при частотном управлении показан на рис. 1-27.
 Аналитическое выражение для близкого к линейному рабочего участка характеристики можно приближенно представить в виде формулы (1-21), из которой видно, что частота вращения ротора двигателя ω пропорциональна частоте вращения поля статора ω1, которая, в свою очередь, пропорциональна частоте питания f. Амплитуда напряжения питания меняется так, чтобы отношение амплитуды и частоты оставалось постоянным k
Аналитическое выражение для близкого к линейному рабочего участка характеристики можно приближенно представить в виде формулы (1-21), из которой видно, что частота вращения ротора двигателя ω пропорциональна частоте вращения поля статора ω1, которая, в свою очередь, пропорциональна частоте питания f. Амплитуда напряжения питания меняется так, чтобы отношение амплитуды и частоты оставалось постоянным k ;
; ,
,
где  (1-21)
(1-21)
Управление асинхронным двухфазным двигателем (АДД). Импульсное управление АДД.
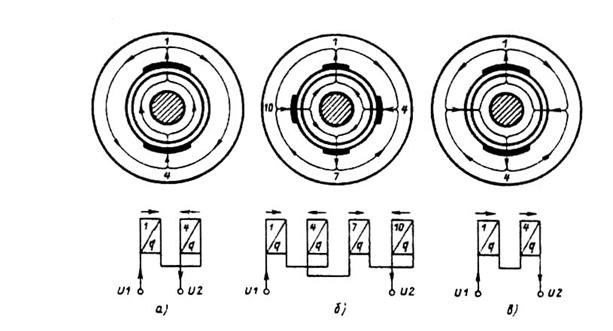
 Основным элементом импульсного управления АДД является двухфазный инвертор, показанный на рис.2-3.1,а Этот инвертор, состоящий из двух инверторов, формирующих напряжения переменного тока основной частоты для питания обмотки управления (Uоу) и возбуждения (Uов). Эти инверторы должны формировать напряжения, сдвинутые друг относительно друга на 90 электрических градусов, причем инвертор, формирующий напряжения Uоу, должен быть управляемым, т.е. иметь возможность изменять это напряжение по амплитуде (действующему значению). Эту функцию можно выполнить с помощью ШИМ на основной или несущей частоте. На рис. 2-3.1, б показана временная диаграмма работы инвертора с управлением величиной напряжения Uоу с помощью ШИМ на основной частоте. Здесь для управления АДД изменяется скважность восьми импульсов ключей СКЗ, что приводит к сдвигу и изменению по длительности импульсов напряжения Uоу, как показано на рис. 2-3.1, б Так как изменение длительности импульса Uоу приводит к изменению действующего значения основной гармоники, такое управление эквивалентно амплитудно-фазовому управлению на основной частоте.
Основным элементом импульсного управления АДД является двухфазный инвертор, показанный на рис.2-3.1,а Этот инвертор, состоящий из двух инверторов, формирующих напряжения переменного тока основной частоты для питания обмотки управления (Uоу) и возбуждения (Uов). Эти инверторы должны формировать напряжения, сдвинутые друг относительно друга на 90 электрических градусов, причем инвертор, формирующий напряжения Uоу, должен быть управляемым, т.е. иметь возможность изменять это напряжение по амплитуде (действующему значению). Эту функцию можно выполнить с помощью ШИМ на основной или несущей частоте. На рис. 2-3.1, б показана временная диаграмма работы инвертора с управлением величиной напряжения Uоу с помощью ШИМ на основной частоте. Здесь для управления АДД изменяется скважность восьми импульсов ключей СКЗ, что приводит к сдвигу и изменению по длительности импульсов напряжения Uоу, как показано на рис. 2-3.1, б Так как изменение длительности импульса Uоу приводит к изменению действующего значения основной гармоники, такое управление эквивалентно амплитудно-фазовому управлению на основной частоте.
Функциональная схема САР частоты вращения двигателя постоянного тока показана на рисунке 3-4. В этой схеме реализуется пропорциональный закон управления с помощью дифференциального услилителя, на прямой вход которого подается напряжение задания Uз от задатчика, а на инверсный - напряжение обратной связи Uос от тахогенератора, измеряющего частоту вращения. Сигнал управления U=(Uз-Uос)К'п подается на силовую схему вентильного преобразователя и через него на якорную цепь двигателя, осуществляя опорное управление ДПТ. Тахогенератор подключен к ДПТ через редуктор с коэффициентом передачи Кред. Структурная схема системы без учета инерционности якорной цепи ДПТ и тахогенератора ТГ показана нарисунке 3-5. Т
этой схеме реализуется пропорциональный закон управления с помощью дифференциального услилителя, на прямой вход которого подается напряжение задания Uз от задатчика, а на инверсный - напряжение обратной связи Uос от тахогенератора, измеряющего частоту вращения. Сигнал управления U=(Uз-Uос)К'п подается на силовую схему вентильного преобразователя и через него на якорную цепь двигателя, осуществляя опорное управление ДПТ. Тахогенератор подключен к ДПТ через редуктор с коэффициентом передачи Кред. Структурная схема системы без учета инерционности якорной цепи ДПТ и тахогенератора ТГ показана нарисунке 3-5. Т очность системы характеризуется величиной ошибки управления дельта w которую можно совмещать с сигналом рассоглосования Е через параметры обратной связи: дельта w = Е/Кос. Общая ошибка состоит из ошибки по заданию Е' и ошибки по возмущению Е'', которые можно вычислить через передаточные функции по заданию и возмущению как показано ввыражении (3-4 ). Передаточные функции Wе'(p) и Wе''(p) можно вычислить по структурной схеме системы и получить ихвыражения ( 3-5 ) и( 3-6 ) .
очность системы характеризуется величиной ошибки управления дельта w которую можно совмещать с сигналом рассоглосования Е через параметры обратной связи: дельта w = Е/Кос. Общая ошибка состоит из ошибки по заданию Е' и ошибки по возмущению Е'', которые можно вычислить через передаточные функции по заданию и возмущению как показано ввыражении (3-4 ). Передаточные функции Wе'(p) и Wе''(p) можно вычислить по структурной схеме системы и получить ихвыражения ( 3-5 ) и( 3-6 ) .

 ;
; 

 ;
;  (3-3)
(3-3)
Для анализа точности системы рассматривают различные режимы:
режим стабилизации при Vз=const;
режим движения с постоянным ускорением Vз=Vt;
переходный режим, когда Vз изменяется скачком.
Для статической системы характерно наличие статической ошибки, которая может быть вычислена по формулам ( 3-3 ) ,( 3-4 ) ,( 3-5 ) при t->бесконечности, т.е. р->0. Так получим для составляющих статической ошибки выражения поформулам ( 3-6 ) и( 3-7 ) . Нарисунке 3-7 показана механическая характеристика двигателя с П-регулятором и без регулятора. При отсутствии регулятора уменьшение частоты вращения, при нагрузке двигателя, дельта w будет выражатьсяформулой ( 3-8 ) , а при наличии П-регулятораформулой ( 3-7 ) , из сравнения которых видно, что П-регулятор уменьшает статическую ошибку по возмущению в ( 1+ Кос Кп/Кэм ) раз, т.е. чем больше Кп, тем меньше статичекая ошибка, но она никогда не может быть сделана равной 0, поэтому такая система называется статической. Динамическая ошибка в такой системе пропорциональна скорости изменения задающего воздействия V. Изменение частоты вращения при разгоне двигателя с выходом на постоянную установку показано нарисунке 3-7 . Что касается быстродействия системы, то оно увеличивается при увеличении Кп, как видно из формулы, например, ( 3-4 ) в которой постоянная времени уменьшается в ( 1+К ) раз.

 (3-8)
(3-8)
 (3-7)
(3-7)
studfiles.net
Использование АД в регулируемом электроприводе представляет особый интерес, т.к. АД является наиболее простым, дешевым и надежным двигателем. Возможности его регулирования, обеспечиваются изменением частоты, U и I статорной обмотки. Для реализации этой возможности питание двигателя необходимо осуществлять от управляемого преобразователя частоты. В качестве преобразователей частоты могут использоваться электромашинные и статические преобразователи. При частотном управлении АД возникает необходимость, регулировать не только частоту, но и величину подводимого U, причем U регулируется не только в функции частоты, но ещё и в функции нагрузки двигателя. Регулирование U в функции частоты и нагрузки можно осуществить лишь в замкнутых системах.
Законы частотного управления. Основной закон частотного регулирования (закон Костенко), известный ещё из курса электрических машин, в математической форме имеет вид
 , где МС и М’C -статические моменты сопротивления соответствующие скорости двигателя при частотах f1 и f’1. U1 и U’1 -соответствующие частотам f1 и f’1 напряжения.
, где МС и М’C -статические моменты сопротивления соответствующие скорости двигателя при частотах f1 и f’1. U1 и U’1 -соответствующие частотам f1 и f’1 напряжения.
Закон изменения напряжения определяется не только частотой источника питания, но и характером изменения момента сопротивления механизма на валу двигателя при изменении угловой скорости. Согласно формуле Бланка  или в относительных единицах
или в относительных единицах Учитывая, что
Учитывая, что , а
, а , можно написать
, можно написать Тогда основной закон после подстановки в формулу
Тогда основной закон после подстановки в формулу значенияC , будет иметь вид:
значенияC , будет иметь вид:  При постоянном моменте на валу двигателя МС (следовательно и С ) не зависит от скорости, а значит и частоты. Поэтому х=0 и
При постоянном моменте на валу двигателя МС (следовательно и С ) не зависит от скорости, а значит и частоты. Поэтому х=0 и
 или
или , а в именованных единица
, а в именованных единица  Полученный закон – этозакон пропорционального управления. Механические характеристики двигателя при этом законе изображены на рисунке. Плавное регулирование до f1=0 при этом законе невозможно. Невозможно также обеспечить устойчивую работу двигателя при Мс=const в широком диапазоне регулирования частоты.
Полученный закон – этозакон пропорционального управления. Механические характеристики двигателя при этом законе изображены на рисунке. Плавное регулирование до f1=0 при этом законе невозможно. Невозможно также обеспечить устойчивую работу двигателя при Мс=const в широком диапазоне регулирования частоты. 

Закон пропорционального регулирования  Механические характеристики при этом законе изображены на рис. . Приняв0=0 получим закон управления
Механические характеристики при этом законе изображены на рис. . Приняв0=0 получим закон управления
 или
или 

11.1. Статические мех. хар-ки. Для получения основных соотношений воспользуемся Т образной схемой замещения АД, которая наиболее точно отражает реальные физические процессы в двигателе.

 ,
,  ,
, , Sа - абсолютное скольжение. после преобразований получим уравнение механической характеристики АД для случая частотного управления
, Sа - абсолютное скольжение. после преобразований получим уравнение механической характеристики АД для случая частотного управления
 , где
, где  ;
; ;
; ;
; ;
; . Т.о.
. Т.о. При пропорциональном законе управления
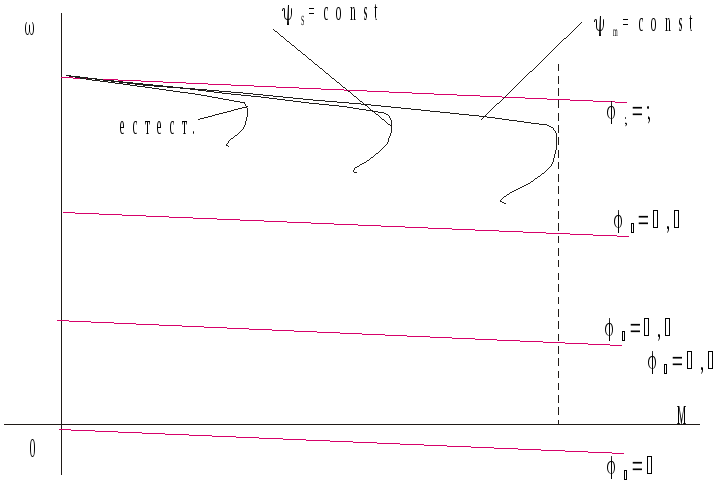
При пропорциональном законе управления , который графически можно представить в виде прямой (см. график). Точке А , для которойf1=f1H (1=1) и U1=U1H (V1=1) , соответствует естественная характеристика двигателя, которая изображена на следующем рисунке. Здесь же приведено семейство механических характеристик при 1<1. Видно, что перегрузочная способность двигателя уменьшается, особенно при 1 <0,5. Объясняется это, тем, что при снижении частоты всё больше начинает сказываться влияние падения напряжения на активном сопротивлении r1, которое от частоты не зависит. Все большая часть питающего напряжения начинает прикладываться к r1 , а к остальной части схемы, в том числе к цепи намагничивания, - меньшая.
, который графически можно представить в виде прямой (см. график). Точке А , для которойf1=f1H (1=1) и U1=U1H (V1=1) , соответствует естественная характеристика двигателя, которая изображена на следующем рисунке. Здесь же приведено семейство механических характеристик при 1<1. Видно, что перегрузочная способность двигателя уменьшается, особенно при 1 <0,5. Объясняется это, тем, что при снижении частоты всё больше начинает сказываться влияние падения напряжения на активном сопротивлении r1, которое от частоты не зависит. Все большая часть питающего напряжения начинает прикладываться к r1 , а к остальной части схемы, в том числе к цепи намагничивания, - меньшая.

Т.о. закон пропорционального управления не очень хорош .Выход из положения - при уменьшении f1 напряжение U1 уменьшать в меньшей степени (смотри пунктир на графике V1=f(1))
Механические характеристики в этом случае будут иметь вид, изображенный на следующем графике. Иначе говоря, можно подобрать такую зависимость V1 от , которая обеспечит постоянство критического момента при изменении частоты, в том числе и при 1=0. Данный закон регулирования может быть обеспечен лишь при условии, если напряжение изменяется не только в функции частоты, но и нагрузки на валу двигателя.
При изменении нагрузки изменяются токи в роторе и статоре. Это изменяет падение напряжения на r1. Поэтому напряжение, подводимое к статору при изменении частоты необходимо регулировать т.о., чтобы скомпенсировать падение напряжения на r1и других элементах схемы замещения. Этим самым можно обеспечить постоянство потокосцеплений.
11.2.Если напряжение, подводимое к статору, регулировать т.о., чтобы компенсировать падение напряжения и на.r1и на x1 и на xl2, то можно обеспечить r=const. В этом случае можно считать, что двигатель питается напряжением Er , а не U1 и  . Компенсация падений напряжения наr1, x1, x2’ равносильна тому, что как - будто этих сопротивлений нет вообще, следовательно b=0;с=0;d=0;е=1. Уравнения механических характеристик и Мкр принимают вид (вместо V1 подставляем er):
. Компенсация падений напряжения наr1, x1, x2’ равносильна тому, что как - будто этих сопротивлений нет вообще, следовательно b=0;с=0;d=0;е=1. Уравнения механических характеристик и Мкр принимают вид (вместо V1 подставляем er):
 ;
;
Зависимость М от скольжения линейна. Характеристики получаются такими, как у компенсированной машины постоянного тока независимого возбуждения. Перегрузочная способность теоретически равна . Именно этот вариант и реализуется в современных системах частотно регулируемых электроприводов.
В принципе и это не является пределом. При компенсации падения напряжения ещё и на r2’ можно получить абсолютно жесткую механическую характеристику с постоянным скольжением (см.график).
studfiles.net
Для осуществления возможности регулирования момента и скорости в современных электроприводах используются следующие методы частотного управления, такие как:
Наибольшее распространение получили асинхронные электроприводы со скалярным управлением. Его используют в приводах компрессоров, вентиляторов, насосов и прочих механизмов в которых необходимо удерживать на определенном уровне или скорость вращения вала электродвигателя (применяется датчик скорости), либо какого-то технологического параметра (к примеру, давление в трубопроводе, с применением соответствующего датчика).
Принцип действия скалярного управления асинхронным двигателем – амплитуда и частота питающего напряжения изменяются по закону U/f^n = const, где n>=1. То, как будет выглядеть данная зависимость в конкретном случае, зависит от требований предъявляемых нагрузкой электроприводу. Как правило, в качестве независимого воздействия выступает частота, а напряжение при определенной частоте определяется видом механической характеристики, а также значениями критического и пускового моментов. Благодаря скалярному управлению обеспечивается постоянная перегрузочная способность асинхронного двигателя, независящая от частоты напряжения, и все же при довольно низких частотах может произойти значительное снижение момента, развиваемого двигателем. Максимальное значение диапазона скалярного управления, при котором возможно осуществление регулирования значения скорости вращения ротора электродвигателя, без потери момента сопротивления не превышает 1:10.
Скалярное управление асинхронным двигателем довольно просто реализуется, но все же имеются два значительных недостатка. Во-первых, если на валу не установлен датчик скорости, то невозможно осуществлять регулирование значения скорости вращения вала, поскольку она зависит от воздействующей на электропривод нагрузки. Установка датчика скорости с легкостью решает данную проблему, но еще одним значительным недостатком остается – отсутствие возможности регулирования значения момента на валу двигателя. Можно конечно установить датчик момента, но стоимость подобных датчиков, как правило, превышает стоимость самого электропривода. Причем, даже если установить датчик управления моментом, то процесс управления этим самым моментом окажется невероятно инерционным. Еще одно «но» - скалярное управление асинхронным двигателем характеризуется тем, что невозможно осуществление одновременного регулирования скорости и момента, поэтому приходится осуществлять регулирование той величины, которая в данный момент времени наиболее важна в силу условий технологического процесса.
Дабы устранить недостатки, которыми обладает скалярное управление двигателем, еще в 71-м году прошлого века компанией SIEMENS было предложено внедрение метода векторного управления двигателем. В первых электроприводах с векторным управлением использовались двигатели, в которых были встроены датчики потока, что значительно ограничивало область применения подобных приводов.
Система управления современных электроприводов содержит в себе математическую модель двигателя, позволяющую рассчитать скорость вращения и момент вала. Причем в качестве необходимых датчиков устанавливаются только датчики тока фаз статора двигателя. Специально разработанная структура системы управления обеспечивает независимость и практически безынерционность регулирования основных параметров – момент вала и скорость вращения вала.
К сегодняшнему дню сформировались следующие системы векторного управления асинхронным двигателем:
Применение методов векторного управления зависит от области применения электропривода. Если диапазон измерения значения скорости не превышает 1:100, а требования, предъявляемые к точности, колеблются в пределах ±1,5%, то используется бездатчиковая система управления. Если измерение скорости осуществляется в пределах достигающих значений 1: 10000 и больше, а уровень точности должен быть довольно высоким (±0,2% при частоте вращения ниже 1 Гц), или же необходимо позиционировать вал или осуществлять регулирование момента на валу при низких частотах вращения, то применяется система, имеющая обратную связь по скорости.
Преимущества векторного метода управления асинхронным двигателем:
Несмотря на очевидные преимущества, метод векторного управления имеет и определенные недостатки – большая сложность вычислений, для работы необходимо знание параметров двигателя. Помимо всего прочего колебания значения скорости при постоянной нагрузке значительно больше, нежели при скалярном методе управления. Кстати, существуют такие сферы, где используются электроприводы исключительно со скалярным методом управления. К примеру, групповой электропривод, в котором один преобразователь подпитывает несколько двигателей.
ruaut.ru
Использование АД в регулируемом электроприводе представляет особый интерес, т.к. АД является наиболее простым, дешевым и надежным двигателем. Возможности его регулирования, обеспечиваются изменением частоты, UиIстаторной обмотки. Для реализации этой возможности питание двигателя необходимо осуществлять от управляемого преобразователя частоты. В качестве преобразователей частоты могут использоваться электромашинные и статические преобразователи. При частотном управлении АД возникает необходимость, регулировать не только частоту, но и величину подводимогоU, причемUрегулируется не только в функции частоты, но ещё и в функции нагрузки двигателя. РегулированиеUв функции частоты и нагрузки можно осуществить лишь в замкнутых системах.
При выборе соотношения между частотой и напряжением, подводимым к статору АД, чаще всего исходят из условия сохранения перегрузочной способности двигателя для любой из его регулировочных механических характеристик. Основной закон частотного регулирования (закон Костенко) в математической форме имеет вид
 , где МСи М’C-статические моменты сопротивления соответствующие скорости двигателя при частотахf1иf’1;U1иU’1-соответствующие частотамf1иf’1напряжения.
, где МСи М’C-статические моменты сопротивления соответствующие скорости двигателя при частотахf1иf’1;U1иU’1-соответствующие частотамf1иf’1напряжения.
З-н изменения Uопределяется не только частотой источника питания, но и хар-ом изменения момента сопр-я механизма на валу двигателя при изменении угловой ск-ти.
 Мех. хар-ки двигателя при этом законе изображены на рис. Жесткость хар-к сохраняется высокой. Критический момент в зоне частот, близких к основной, остается неизменной. Влияние паденияUнаr1становится весьма заметным, к намагничивающей цепи двигателя подводится тем меньшееU, чем меньше частота. Это вызывает ↓ критического момента, →, перегрузочной способности двигателя.Плавное регул-е доf1=0 при этом законе невозможно. Невозможно также обеспечить устойчивую работу двигателя при Мс=const в широком диапазоне регулирования частоты.
Мех. хар-ки двигателя при этом законе изображены на рис. Жесткость хар-к сохраняется высокой. Критический момент в зоне частот, близких к основной, остается неизменной. Влияние паденияUнаr1становится весьма заметным, к намагничивающей цепи двигателя подводится тем меньшееU, чем меньше частота. Это вызывает ↓ критического момента, →, перегрузочной способности двигателя.Плавное регул-е доf1=0 при этом законе невозможно. Невозможно также обеспечить устойчивую работу двигателя при Мс=const в широком диапазоне регулирования частоты.
Закон пропорционального регулир-я можно легко реализовать при разомкнутой системе. Этот закон целесообразен только для крупных АД,потери в двигателе больше, чем при основном законе. М ех. хар-ки при этом законе изображены на рис.
ех. хар-ки при этом законе изображены на рис.
Механические характеристики при этом законе изображены на рис. При постоянной мощности статической нагрузки РС=const  или
или : В этом случае Х=-1 Приняв0=0, получим закон управления
: В этом случае Х=-1 Приняв0=0, получим закон управления
 или
или
Для получения основных соотношений воспользуемся Т образной схемой замещения АД, которая наиболее точно отражает реальные физические процессы в двигателе. 
Здесь 
 ;
; ;
; , Sа – абсолютноескольжение.
, Sа – абсолютноескольжение.

При пропорциональном законе управления  , который графически можно представить в виде прямой (см. график). Точке А, для которойf1=f1H(1=1) иU1=U1H(V1=1) , соответствует естеств. хар-ка двигателя, которая изображена на следующем рис. Здесь приведено семейство мех. хар-к при1<1. Перегрузочная способность двигателя ↓, особенно при1<0,5. ↓ Мкрограничивает диапазон регулирования, т.к. при некоторой частоте перегрузочная способность будет очень малой.
, который графически можно представить в виде прямой (см. график). Точке А, для которойf1=f1H(1=1) иU1=U1H(V1=1) , соответствует естеств. хар-ка двигателя, которая изображена на следующем рис. Здесь приведено семейство мех. хар-к при1<1. Перегрузочная способность двигателя ↓, особенно при1<0,5. ↓ Мкрограничивает диапазон регулирования, т.к. при некоторой частоте перегрузочная способность будет очень малой.
 При ↓ частоты начинает сказываться влияние паденияUна акт. сопр-ииr1, которое от частоты не зависит. Все большая часть пит.Uначинает прикладываться кr1, а к остальной части схемы, в том числе к цепи намагничивания, - меньшая. Т.о.закон пропорционального управления не очень хорош.
При ↓ частоты начинает сказываться влияние паденияUна акт. сопр-ииr1, которое от частоты не зависит. Все большая часть пит.Uначинает прикладываться кr1, а к остальной части схемы, в том числе к цепи намагничивания, - меньшая. Т.о.закон пропорционального управления не очень хорош.
В ыход из положения - при уменьшенииf1 напряжениеU1уменьшать в меньшей степени (смотри пунктир на графикеV1=f(1)).
ыход из положения - при уменьшенииf1 напряжениеU1уменьшать в меньшей степени (смотри пунктир на графикеV1=f(1)).
М ех. хар-ки в этом случае будут иметь вид, изображенный на следующем графике. Можно подобрать такую зависимостьV1от, которая обеспечит постоянство критич. момента при изменении частоты, в том числе и при1=0. При малых частотах ток, потребляемый двигателем, больше, чем на естеств. хар-ке и двигатель сильно греется. Если же ему обеспечить номинальный нагрев, то придется уменьшитьU, что приведет к ↓Мкр. Получается, что принципиально невозможно обеспечить законV1=f(1), при котором удовлетворялись бы 2 противоречия, т.е. обеспечение перегрузочной способности и нормального нагрева двигателя при снижении частоты. Данный закон регулирования может быть обеспечен лишь при условии, еслиUизменяется не только в функции частоты, но и нагрузки на валу двигателя.
ех. хар-ки в этом случае будут иметь вид, изображенный на следующем графике. Можно подобрать такую зависимостьV1от, которая обеспечит постоянство критич. момента при изменении частоты, в том числе и при1=0. При малых частотах ток, потребляемый двигателем, больше, чем на естеств. хар-ке и двигатель сильно греется. Если же ему обеспечить номинальный нагрев, то придется уменьшитьU, что приведет к ↓Мкр. Получается, что принципиально невозможно обеспечить законV1=f(1), при котором удовлетворялись бы 2 противоречия, т.е. обеспечение перегрузочной способности и нормального нагрева двигателя при снижении частоты. Данный закон регулирования может быть обеспечен лишь при условии, еслиUизменяется не только в функции частоты, но и нагрузки на валу двигателя.
Управление при s=const. Этот случай соответствует такому регулированию напряжения, приложенного к статору, при котором обеспечивается компенсация падения напряжения наr1. ЭДСes=e1в этом случае становится независимой от нагрузки, т.е. становится постоянной при данном значении частоты. При изменении частоты нужно изменять напряжение. Пропорционально изменению частоты будет изменятся иes. Это соответствует стабилизации потокосцепления . Если же будет изменяться нагрузка, то дополнительно нужно регулировать напряжение т.о., чтобы скомпенсировать изменившееся падение напряжения наr1и этим самым обеспечить как постоянствоes, так и постоянство потокосцепленияS.
. Если же будет изменяться нагрузка, то дополнительно нужно регулировать напряжение т.о., чтобы скомпенсировать изменившееся падение напряжения наr1и этим самым обеспечить как постоянствоes, так и постоянство потокосцепленияS.
Уравнение механической характеристики примет вид.
 ;
; 
П ри изменении частоты нужно пропорционально изменять и Еm, что и соответствует компенсации падений напряжения наr1 иx1. Уравнение механической характеристики:
ри изменении частоты нужно пропорционально изменять и Еm, что и соответствует компенсации падений напряжения наr1 иx1. Уравнение механической характеристики:
 ;
; 
Анализ показывает, что в этом случае получим увеличение Мкр примерно в 2 раза при всех частотах по сравнению с Мкр на естественной характеристике. При снижении частоты относительная жесткость характеристик возрастет.
Если напряжение, подводимое к статору, регулировать т.о., чтобы компенсировать падение напряжения и на.r1и наx1и наxl2, то можно обеспечитьr=const. В этом случае можно считать, что двигатель питается напряжениемEr, а неU1и .
.
Компенсация падений напряжения на r1,x1,x2’равносильна тому, что как - будто этих сопротивлений нет вообще, следовательноb=0;с=0;d=0;е=1. Уравнения механических характеристик и Мкр принимают вид (вместоV1подставляемer):
 ;
; 
Зависимость М от скольжения линейна. Характеристики получаются такими, как у компенсированной машины постоянного тока независимого возбуждения. Перегрузочная способность теоретически равна . Именно этот вариант и реализуется в современных системах частотно регулируемых электроприводов.
В принципе и это не является пределом. При компенсации падения напряжения ещё и на r2’можно получить абсолютно жесткую механическую характеристику с постоянным скольжением (см. график).
Т.о. только при реализации рассмотренных здесь законов возможности АД используется полностью.

11. Регулирование скорости ДПТ НВ и ПВ. Реостатное регулирование, регулирование изменением подводимого напряжения, регулирование изменением магнитного потока; механические характеристики при указанных способах регулирования; основные показатели регулирования.
Двигатель постоянного тока с независимым возбуждением (ДПТ НВ)
Д ПТ НВ работает при Ф=const. Ур-е механической характеристики.
ПТ НВ работает при Ф=const. Ур-е механической характеристики.  . Подставляем
. Подставляем =>
=>
Уравнение электромеханической характеристики.  .
.
В установившемся режиме diя/dt=dM/dt=0.Ур-я статических характеристик: 

Хар-ки двигателя, при отсутствии в якорной цепи добав. сопротивления при Uя =const и ф=const, являются естественными. Наклон их определяется величинами  .
.
При изменении параметров двигателя, сети, или при использовании специальных схем включения характеристики двигателя будут искусственными.
1
 . при изменении сопротивления в якорной цепи ↓ жесткость характеристик
. при изменении сопротивления в якорной цепи ↓ жесткость характеристик . Семейство мех. хар-к, соответствующих различным значениямRдоб, изображено на рис., причем Rд3>Rд2>Rд1. В частном случае при U=0 когда якорь замкнут на некоторое сопротивление, все хар-ки пересекаются в начале координат Из графиков видно, что ↑ сопротивления вызывает ↓ скорости дв-ля, т.к при этом ↑ падение напряжения на якоре, ↓ ток, следовательно и ↓ момент двигателя.
. Семейство мех. хар-к, соответствующих различным значениямRдоб, изображено на рис., причем Rд3>Rд2>Rд1. В частном случае при U=0 когда якорь замкнут на некоторое сопротивление, все хар-ки пересекаются в начале координат Из графиков видно, что ↑ сопротивления вызывает ↓ скорости дв-ля, т.к при этом ↑ падение напряжения на якоре, ↓ ток, следовательно и ↓ момент двигателя.
2 . При измененииU, подводимого к якорю двигателя, изменяется 0. Жесткость характеристик неизменна. Чтобы менять подводимое U,необходимо питать двигатель от источника регулируемого напряжения.
. При измененииU, подводимого к якорю двигателя, изменяется 0. Жесткость характеристик неизменна. Чтобы менять подводимое U,необходимо питать двигатель от источника регулируемого напряжения.
3. Иногда необходимо ↑ рабочую скорость сверх основной. При U=const ослабляем магнитный поток дв-ля. ↓Ф вызывает ↑ 0, т.к.  , но ↓жесткость хар-к
, но ↓жесткость хар-к . В => будет ↑ падение скорости при одном и том же значении Мс.
. В => будет ↑ падение скорости при одном и том же значении Мс.
Уравнение мех. хар-ки при ослабленном Ф.  ;
; .
.
При пуске двигателя в ход(=0), iя не зависит от Ф, а зависит от U и RЯ:  .
.
Х арактеристики
арактеристики для Ф пересекаются в 1 точке на оси абсцисс. Механические хар-ки
для Ф пересекаются в 1 точке на оси абсцисс. Механические хар-ки ,точки пересечения характеристик не совпадают. При нагрузках, слева от точек пересечения, ωдв ↑, а при нагрузках справа– ωдв ↓. Это явление - опрокидывание регулирования. Причиной является то, что при Мс=const ослабление Ф влияет на скорость в 2-х направлениях: ↑ скорость и ↓ω вследствие ↑ падения напряжения из-за ↑ тока (из-за ↓ЭДС). В точках пересечения эти факторы уравновешивают друг друга, скорость не изменяется. При нормальных нагрузках точки пересечения характеристик находятся в зоне больших токов (нагрузок).
,точки пересечения характеристик не совпадают. При нагрузках, слева от точек пересечения, ωдв ↑, а при нагрузках справа– ωдв ↓. Это явление - опрокидывание регулирования. Причиной является то, что при Мс=const ослабление Ф влияет на скорость в 2-х направлениях: ↑ скорость и ↓ω вследствие ↑ падения напряжения из-за ↑ тока (из-за ↓ЭДС). В точках пересечения эти факторы уравновешивают друг друга, скорость не изменяется. При нормальных нагрузках точки пересечения характеристик находятся в зоне больших токов (нагрузок).
ДПТ ПВ (последовательного возбуждения)
У ДПТ ПВ обмотка возбуждения включена последовательно с обмоткой якоря и его поток Ф =f(iя) зависит от нагрузки машины. Уравнение электромеханической характеристики:
ДПТ ПВ обмотка возбуждения включена последовательно с обмоткой якоря и его поток Ф =f(iя) зависит от нагрузки машины. Уравнение электромеханической характеристики:

П ри измененииU на зажимах дв-ля хар-ки перемещаются вниз или вверх по отношению к естественной. При ↑ сопротивления якорной цепи ωдв↓ и характеристики смещаются вниз. Жесткость характеристик ↓. Из графиков видно, что ω↓ при увеличении нагрузки. Характеристики являются мягкими. Поэтому ДПВ непригодны для ЭПов, требующих постоянства скорости при меняющейся нагрузке.
ри измененииU на зажимах дв-ля хар-ки перемещаются вниз или вверх по отношению к естественной. При ↑ сопротивления якорной цепи ωдв↓ и характеристики смещаются вниз. Жесткость характеристик ↓. Из графиков видно, что ω↓ при увеличении нагрузки. Характеристики являются мягкими. Поэтому ДПВ непригодны для ЭПов, требующих постоянства скорости при меняющейся нагрузке.
studfiles.net