Ответ 13:
Асинхронные двигатели с короткозамкнутым ротором используются в электроприводе (с регулированием скорости оборотов), транспортерах, в подъемных механизмах, вентиляторных установках, компрессорах, нагнетающих ( жидкостных) насосах, различных мешалках( бетон, тесто), шаровые мельницы, дробильные установки, пилорамы, привод станков.
Контрольные вопросы для тестирования
Что называют машиной переменного тока ?
Перечислите режимы работы машин переменного тока.
По каким показателям можно определить режим работы асинхронной машины ?
Что называют электромагнитным моментом? Единицы измерения.
Как направлен вектор магнитной индукции катушки с током? Привести рисунок.
Каким образом электрическая энергия потребляемая АД из сети преобразуется в механическую энергию вращения ротора?
Что называют числом пар полюсов машины ?
Принцип действия однофазных АД ( с пусковой обмоткой
Принцип действия однофазных ( 2-х обмоточных ) АД с фазосдвигающим конденсатором. ?
Тема № 6. ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
Цели работы:1) ознакомиться с устройством и принципом действия, пуском в ход и способами регулирования частоты вращения двигателя постоянного тока параллельного возбуждения;
2) изучить основные характеристики двигателя и методику их снятия.

Рис. 47
Работа выполняется на универсальном стенде (рис.47). В качестве нагрузки двигателя постоянного тока М1 используется трехфазный асинхронный двигательМ2, работающий в режиме динамического тормоза. Чтобы асинхронный двигатель функционировал как тормоз, его статорная обмотка питается постоянным током от мостового выпрямителя, включенного во вторичную цепь автотрансформатораТ. Вращая движок автотрансформатора, устанавливают ток тормоза и, тем самым, задают необходимый тормозной момент на валу двигателя. Для измерения тока тормоза используется амперметрРА1. Автотрансформатор включается в сеть переменного тока выключателемQ1.
и, тем самым, задают необходимый тормозной момент на валу двигателя. Для измерения тока тормоза используется амперметрРА1. Автотрансформатор включается в сеть переменного тока выключателемQ1.
В цепь якоря исследуемого двигателя М1 включен пусковой реостат , в цепь обмотки возбуждения - регулировочный реостат
, в цепь обмотки возбуждения - регулировочный реостат и амперметрРА3, измеряющий ток возбуждения. Двигатель включается в сеть постоянного тока выключателемQ2. Напряжение сетиUизмеряется вольтметромPV, а ток двигателя
и амперметрРА3, измеряющий ток возбуждения. Двигатель включается в сеть постоянного тока выключателемQ2. Напряжение сетиUизмеряется вольтметромPV, а ток двигателя - амперметромРА4.
- амперметромРА4.
Электрическая цепь стенда представлена на рис. 46. Частота вращения двигателя измеряется тахометром, не показанном на схеме. Шкала данного прибора отградуирована в об/мин (с коэффициентом 2/3).
Контрольные вопросы
Ответ1:Двигатель постоянного тока служит для преобразования электрической энергии постоянного тока в механическую энергию. Двигатель параллельного возбуждения, состоит из двух основных частей: неподвижной - статора и вращающейся – ротора. Конструкция и электрическая схема соединения представлена на рис.48 и рис.49 соответственно.

Рис. 48

Статор представляет собой стальной корпус – станину, на внутренней цилиндрической поверхности которого укреплены сердечники полюсов с полюсными наконечниками. На сердечники надеты катушки, составляющие обмотку возбуждения, подключенную к источнику постоянного тока. Обмотка возбуждения расположена на главных (основных) полюсах и создает основной магнитный поток двигателя. Кроме главных полюсов на станине могут быть дополнительные полюса, предназначенные для улучшения коммутации.
Ротор состоит из якоря и коллектора, которые крепятся на одном валу и в механическом отношении составляют одно целое. Якорь представляет собой цилиндрический сердечник, собранный из листов электротехнической стали для снижения магнитных потерь. В его пазах уложена обмотка, выполненная из отдельных секций соединенных между собой и с коллекторными пластинами.
Коллектор представляет собой цилиндр, составленный из отдельных медных пластин, изолированных друг от друга и от вала якоря. На коллектор накладываются неподвижные графитовые (медно-графитовые) щетки, посредством которых осуществляется соединение обмотки якоря с источником постоянного тока. Коллектор и щетки предназначены для изменения направления тока в проводниках обмотки якоря при их переходе из зоны магнитного полюса одной полярности (например, северного полюса) в зону полюса другой полярности – (южного полюса). Благодаря этому сохраняется неизменным направление вращения якоря.
При подключении двигателя к источнику постоянного тока в обмотках возбуждения и якоря появляются токи ( и
и ) В результате взаимодействия тока якоря с магнитным потоком, создаваемым обмоткой возбуждения, возникает сила Ампера и, соответственно, электромагнитный момент вращения:
) В результате взаимодействия тока якоря с магнитным потоком, создаваемым обмоткой возбуждения, возникает сила Ампера и, соответственно, электромагнитный момент вращения:
 ,
,
где  - коэффициент, зависящий от конструктивных параметров двигателя;
- коэффициент, зависящий от конструктивных параметров двигателя; - ток якоря;
- ток якоря; - магнитный поток машины.
- магнитный поток машины.
Полезный вращающий момент на валу двигателя Мменьше электромагнитного момента на величину потерь холостого хода , обусловленного механическими и магнитными потерями.
, обусловленного механическими и магнитными потерями.
 .
.
В установившемся режиме момент вращения равен тормозному моменту
 .
.
При вращении якоря его проводники пересекают магнитное поле и в них наводится ЭДС  , где
, где - частота вращения якоря;
- частота вращения якоря; - величина постоянная для данной машины.
- величина постоянная для данной машины.
Так как ЭДС направлена против тока якоря, то ее называют противо-ЭДС.
studfiles.net
Агрегат, преобразующий электрическую энергию в механическую, называется электродвигателем. Эти машины могут применяться в бытовой технике (маломощные асинхронные двигатели) и в промышленности (краны и лебедки общепромышленного значения и прочее).
 Рисунок 1. Классический пример трехфазного асинхронного электродвигателя - двигатель серии АИР Наибольшее распространение получили трехфазные асинхронные электродвигатели — они используются во всех сферах народного хозяйства (станки и оборудование, автоматика, телемеханика и т. д.).
Рисунок 1. Классический пример трехфазного асинхронного электродвигателя - двигатель серии АИР Наибольшее распространение получили трехфазные асинхронные электродвигатели — они используются во всех сферах народного хозяйства (станки и оборудование, автоматика, телемеханика и т. д.).
На сегодняшний день именно этот тип электрических машин наиболее распространен. Объясняется это простотой эксплуатации, надежностью этих машин, небольшим весом и удачными габаритными размерами.
Электродвигатель с короткозамкнутым ротором используется в электроприводах разных станков (металлообрабатывающих, грузоподъемных, ткацких, деревообрабатывающих), в вентиляторах, землеройных машинах, в лифтах, насосах, бытовых приборах и т.д.
Электродвигатель асинхронный с короткозамкнутым ротором позволяет значительно снизить энергопотребление оборудованием, которое он питает, обеспечить высокий уровень его надежности, увеличить срок службы. Совокупность этих характеристик, как правило, сразу положительно отражается на модернизации всего производства.
Основные виды и некоторые характеристики электродвигателя асинхронного однофазного и трехфазного
Сегодня самыми востребованными в разных отраслях промышленности и любого производства являются следующие виды машин:
 Рисунок 2. Двигатель с фазным ротором — крановый серии МТF. Электродвигатели прочно вошли в современную промышленность. От их надежности и качества зависит все производство. Не важно, стиральная машина или ткацкий станок, складское оборудование или система вентиляции — работа многих машин невозможна без исправной работы электромотора. В этой связи важно не просто купить электродвигатель, например у надежного поставщика, но и неукоснительно соблюдать все указанные в сопроводительных документах условия эксплуатации. Для северного сурового климата, к примеру, требуются специальные двигатели, которые имеют встроенную температурную защиту. Кроме того, следует регулярно производить осмотры с необходимым и своевременным ремонтом.
Рисунок 2. Двигатель с фазным ротором — крановый серии МТF. Электродвигатели прочно вошли в современную промышленность. От их надежности и качества зависит все производство. Не важно, стиральная машина или ткацкий станок, складское оборудование или система вентиляции — работа многих машин невозможна без исправной работы электромотора. В этой связи важно не просто купить электродвигатель, например у надежного поставщика, но и неукоснительно соблюдать все указанные в сопроводительных документах условия эксплуатации. Для северного сурового климата, к примеру, требуются специальные двигатели, которые имеют встроенную температурную защиту. Кроме того, следует регулярно производить осмотры с необходимым и своевременным ремонтом.
cable.ru
 Электродвигатели применяются достаточно широко. Асинхронные электродвигатели могут применяться как в бытовой технике, так и на промышленных предприятиях.
Электродвигатели применяются достаточно широко. Асинхронные электродвигатели могут применяться как в бытовой технике, так и на промышленных предприятиях.
Асинхронный электродвигатель благодаря простоте в производстве и надёжности в эксплуатации широко применяют в электрическом приводе. Электродвигатели асинхронные имеют свои специфические свойства, области применения и ограничения использования.
У асинхронного электродвигателя ограничен диапазон регулирования частоты вращения и значительное потребление реактивной мощности в режиме малых нагрузок. Создание регулируемых статических полупроводниковых преобразователей частоты существенно расширяет область применения электродвигателей асинхронных в автоматических регулируемых электроприводах.
Электродвигатель состоит из двух основных частей – статора и ротора. Статором называется неподвижная часть машины. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротором, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные электродвигатели бывают с короткозамкнутым и с фазным роторами. Электродвигатели с короткозамкнутым ротором наиболее распространены, они достаточно просты по устройству и удобны в эксплуатации.
Электродвигатели асинхронные с короткозамкнутым ротором имеют следующие преимущества:
Однако асинхронные электродвигатели с короткозамкнутым ротором имеют и свои недостатки. К ним относятся:
Применение асинхронных электродвигателей с короткозамкнутым ротором ограничено, они применяются в тех случаях, когда не требуется регулирование скорости вращения двигателя.
Преимущества асинхронных электродвигателей с фазным ротором:
Электродвигатели асинхронные с фазным ротором используются в тех случаях, когда требуется уменьшить пусковой ток и повысить пусковой момент, а также когда требуется регулирование скорости в небольших пределах.
Перегрузочная способность электродвигателей асинхронныххарактеризуется отношением максимального момента двигателя Мм к его номинальному моменту Мн. В зависимости от величины мощности и назначения двигателя отношение Мм/Мн колеблется примерно в пределах 1-3.
Посмотреть ассортимент асинхронных электродвигателей
Электродвигатели асинхронные: электродвигатель 5АМ, 5АИ, АИР
npocom.ru
 Рис. 1. Асинхронный электродвигатель с фазным ротором Асинхронные электродвигатели с фазным ротором (рис. 1) характеризуются лучшими пусковыми и регулировочными свойствами. Основными компонентами любых электродвигателей являются статор и ротор. В качестве статора используется шихтованный магнитопровод, запрессованный в станину (рис. 2). Три катушки, оси которых расположены под углом 120 градусов друг к другу, уложены в пазах магнитопровода. В зависимости от используемого напряжения, фазы обмоток соединяются по одной из известных в электротехнике схем: «треугольник» или «звезда».
Рис. 1. Асинхронный электродвигатель с фазным ротором Асинхронные электродвигатели с фазным ротором (рис. 1) характеризуются лучшими пусковыми и регулировочными свойствами. Основными компонентами любых электродвигателей являются статор и ротор. В качестве статора используется шихтованный магнитопровод, запрессованный в станину (рис. 2). Три катушки, оси которых расположены под углом 120 градусов друг к другу, уложены в пазах магнитопровода. В зависимости от используемого напряжения, фазы обмоток соединяются по одной из известных в электротехнике схем: «треугольник» или «звезда».
Ротор имеет вид цилиндра. Он собран из специальных листов, изготовленных из электротехнической стали, расположенных на валу. Обмотка ротора тоже трехфазная. При этом в ней содержится такое же количество пар полюсов, что и в обмотке статора. Концы фазных катушек соединяются с контактными кольцами, которые закреплены также на валу. Выход во внешнюю цепь осуществляется с помощью специальных металлографитовых щеток.
 Рис. 2. Статор электродвигателя
Рис. 2. Статор электродвигателя
Электродвигатели с фазным ротором характеризуются следующими особенностями, выгодно отличающими их от двигателей с короткозамкнутым ротором:
Каталог асинхронных электродвигателей богат и разнообразен, так как они находят применение во многих отраслях народного хозяйства. Такие электродвигатели отличаются как своими характеристиками, так и назначением. Так, если рассматривать условия их работы, то двигатели бывают открытого, защищенного, закрытого и взрывоопасного исполнения. Если за основу брать способ охлаждения, то их можно поделить на 4 группы:
По рабочему положению, двигатели бывают горизонтального и вертикального исполнения.
Двигатели снабжаются техническим паспортом, который содержит основные характеристики асинхронных электродвигателей. Рассмотрим расшифровку этих данных на примере двигателя типа 4А10082УЗ, относящегося к асинхронным двигателям серии 4А. Из маркировки следует, что высота оси вращения равна 100 мм, корпус короткий; является двухполюсным, климатическое исполнение — У, категория — 3. Кроме того, принято указывать количество фаз и частоту переменного тока, а также номинальную мощность и коэффициент мощности двигателя (cos φ).
Асинхронные двигатели широко применяются в различных сферах: металлургии, экструдерах, машинах для литья, печатных и упаковочных оборудованиях, в станках с ЧПУ, в пищевой и текстильной промышленности и так далее.
cable.ru
Электродвигатели применяются как главная составляющая электро-привода различных станков, так и в составе с отдельными установками, где необходимо преобразование электрической энергии в механическую (дви- жение) например: вентиляторы с клиноременной передачей, косилки различных модификаций и т.д. Низковольтные асинхронные электродвигатели общего назначения мощностью 0,25...400 кВт, именуемые во всем мире стандартные асинхронные двигатели, составляют основу силового электропривода, применяемого во всех областях человеческой деятельности. Их совершенствованию в промышленно развитых странах придают большое значение. В настоящее время рынок, призванный отражать интересы потребителей, не формулирует сколько-нибудь определенных требований к стандартным асинхронным двигателям, кроме ценовых. В связи с этим для выявления тенденций их совершенствования необходимо исходить из требований внешнего рынка и из достижений основных производителей стандартных асинхронных двигателей.
Асинхронные двигатели - наиболее распространенный вид электрических машин, потребляющих в настоящее время около 40% всей вырабатываемой электроэнергии. Их установленная мощность постоянно возрастает.
Асинхронный двигатели широко применяются в приводах металлообрабатывающих, деревообрабатывающих и других видов станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в лифтах, в ручном электроинструменте, в бытовых приборах и т.д. Практически нет отрасли техники и быта, где не использовались бы асинхронные двигатели.
Потребности народного хозяйства удовлетворяются главным образом двигателями основного исполнения единых серий общего назначения, т.е. применяемых для привода механизмов, не предъявляющих особых требований к пусковым характеристикам, скольжению, энергетическим показателям, шуму и т.п. Вместе с тем в единых сериях предусматривают также электрические и конструктивные модификации двигателей, модификации для разных условий окружающей среды, предназначенные для удовлетворения дополнительных специфических требований отдельных видов приводов и условий их эксплуатации. Модификации создаются на базе основного исполнения серий с максимально возможным использованием узлов и деталей этого исполнения.
В некоторых приводах возникают требования, которые не могут быть удовлетворены двигателями единых серий. Для таких приводов созданы специализированные двигатели, например электробуровые, краново-металлургические и др.
Низковольтные асинхронные электродвигатели общего назначения мощностью 0,25...400 кВт, именуемые во всем мире стандартные асинхронные двигатели, составляют основу силового электропривода, применяемого во всех областях человеческой деятельности.
Их совершенствованию в промышленно развитых странах придают большое значение. В настоящее время рынок, призванный отражать интересы потребителей, не формулирует сколько-нибудь определенных требований к стандартным асинхронным двигателям, кроме ценовых. В связи с этим для выявления тенденций их совершенствования необходимо исходить из из достижений основных производителей стандартных асинхронных двигателей.
| Следующая >Основные неисправности и ремонт в процессе эксплуатации |
xn----8sbnaarbiedfksmiphlmncm1d9b0i.xn--p1ai
Cтраница 2
После выставки во Франкфурте-на - Майне применение асинхронных двигателей и вообще трехфазного тока стало быстро распространяться сначала в Европе, а потом в Америке. [16]
Более простым и дешевым является электропривод с применением асинхронного двигателя с жидкостным реостатом, однако последний требует особого наблюдения и неудобен в эксплуатации. [17]
В установках, где по условиям эксплуатации допустимо применение асинхронного двигателя с фазным ротором, возможности регулируемого электропривода расширяются. Введение дополнительного сопротивления в цепь ротора позволяет вывести часть потерь скольжения из обмоток двигателя. Благодаря этому снижается необходимое завышение габарита двигателя и появляется возможность расширить диапазон мощностей привода при рассмотренных выше способах регулирования скорости. По своим характеристикам данный способ аналогичен реостатному. [18]
При отсутствии взрывозащищеяного электрооборудования допускается в крайнем случае применение асинхронных двигателей с кароткозамкнутым ротором в закрытом обдуваемом исполнении и электроаппаратуры в герметичном или пылевлагонепроницаемом исполнении. [19]
Этот способ компенсации экономически более выгоден, чем применение асинхронных двигателей и батарей конденсаторов. [20]
В ряде случаев, когда требуется небольшое число скоростей, бывает целесообразным применение асинхронных двигателей с переключением обмотки на разных числах пар полюсов. Однако при этом: возможно получение лишь небольшого числа станда ртных скоростей вращения ( обычно не более 4), не всегда достаточно удовлетворяющих требованиям технологического процесса. [21]
С точки зрения надежности и экономичности целесообразно в первую очередь рассмотреть возможности применения асинхронных двигателей с короткозамкнутым ротором. Это наиболее простой в эксплуатации, надежный двигатель, имеющий наименьшие массу, габариты и стоимость, а также высокие энергетические показатели по сравнению с другими электродвигателями. [22]
Очевидно, что наиболее простым и приемлемым для указанных механизмов является электропривод с применением асинхронных двигателей с короткозамкнутым ротором. Но не всегда можно и целесообразно останавливаться на таких двигателях. [23]
Таким образом, рассмотренная универсальная система управления реверсивным тирнсторным электроприводом позволяет существенно расширить управляемость и область применения асинхронных двигателей. [24]
Если в рассматриваемом диапазоне требуется иметь лишь ограниченное число скоростей, а именно 2 - 4, то наиболее рациональным будет применение асинхронных двигателей с переключением полюсов, конечно, при условии, что они изготовляются для соответствующих мощностей и нет необходимости осуществлять весьма частые реверсы и пуски. [25]
Оехематически изображен сверлильный - анок для трех случаев: а) при приме - Тении нерегулируемого двигателя и Механическом регулировании скорости, при электромеханическом регулировании скорости с применением асинхронного двигателя с переключением полюсов и в) при электрическом регулировании скорости с применением регулируемого двигателя постоянного тока. [27]
При массовом производстве общепромышленных типов асинхронных двигателей малой и средней мощности крупные машины изготовляются мелкими сериями, а очень крупные - по индивидуальным заказам; кроме того, некоторые Йодификации могут не изготовляться в массовом производстве, однако масштабы производства и применения асинхронных двигателей настолько велики по сравнению с другими типами машин, что при их проектировании на первое место выступает экономический подход. Этому способствует еще и то обстоятельство, что асинхронные машины по роду своего применения редко бывают машинами предельной мощности ( в отличие от турбо - и гидрогенераторов или синхронных компенсаторов), и поэтому некоторые ограничения на основные размеры не накладываются в процессе разработки проекта, а это позволяет варьировать переменные в более широком диапазоне и затрудняет получение лучшего из приемлемых, или оптимального, решения. G другой стороны, при разработке индивидуальных заказов довольно часто можно выполнить машину на уже имеющихся сердечниках и решить вопрос, какой из типоразмеров лучше подходит для применения. [28]
В этом случае тихоходные синхронные двигатели имеют общий вал с поршневыми машинами ( без муфты), что делает установку очень компактной, надежной и удобной в эксплуатации. Применение асинхронных двигателей было бы очень невыгодно из-за очень низкого cos cp этих двигателей при малой скорости. [29]
Применение асинхронного двигателя с фазным ротором было вызвано необходимостью плавного преодоления большого пускового момента мельницы, что позволяло улучшить условия эксплуатации механической части привода ( венцовой шестерни, редуктора) и не завышать установленную мощность электродвигателя. Наличие пускового реостата и колец являлось недостатком этого электродвигателя, поэтому для мельниц был рекомендован асинхронный двигатель с коротко-замкнутым ротором. [30]
Страницы: 1 2 3 4
www.ngpedia.ru
К преимуществам двигателей такого типа, в частности, перед асинхронными двигателями с фазным ротором, относятся простота обслуживания и отсутствие подвижных контактов. Здесь нет щеток и контактных колец, питание подается только на неподвижную трехфазную обмотку статора, что и делает этот двигатель весьма удобным для самых разных сфер применения, практически универсальным. Такой двигатель прост в изготовлении и сравнительно дешев, затраты при эксплуатации минимальны, а надежность высока.
Если нагрузка на двигатель не чувствительна к скорости вращения его ротора, если не требуется регулировка оборотов, то возможно включение двигателя в любую сеть без каких-либо дополнительных преобразователей. Справедливости ради стоит отметить, что при включении такого трехфазного двигателя в однофазную сеть, требуется подключение пускового фазосдвигающего конденсатора, что отнюдь не является проблемой.
Если говорить о недостатках асинхронных двигателей с короткозамкнутым ротором, то их несколько. При включении двигателя в сеть пусковой ток довольно велик, при этом пусковой момент значительно меньше номинального, это несколько ограничивает область применения, и если требуется большой пусковой момент, то асинхронный двигатель с короткозамкнутым ротором не подойдет.
Однако этот недостаток можно преодолеть применением частотного преобразователя, позволяющего плавно повышать обороты, и таким образом обеспечить достаточно высокий пусковой момент.
Проблема регулировки оборотов также имеет место, но и решить ее можно аналогичным образом, опять же применением частотного преобразователя. Современная полупроводниковая база делает частотные преобразователи с каждым годом все более доступными.
Еще одним недостатком асинхронных двигателей с короткозамкнутым ротором является их низкий коэффициент мощности, особенно при малой нагрузке и на холостом ходу, что снижает эффективность такой электрической системы в целом. В масштабах предприятий это чревато существенными потерями, поэтому широко распространена практика применения систем компенсации реактивной мощности, когда параллельно с обмотками электродвигателя устанавливают компенсирующие конденсаторы.
Устройство асинхронных электродвигателей с короткозамкнутым ротором.
Асинхронный двигатель - это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство

На рисунке: 1 - вал, 2,6 - подшипники, 3,8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.

Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется "беличьей клеткой". В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.

Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье - асинхронный двигатель с фазным ротором.

Принцип работы
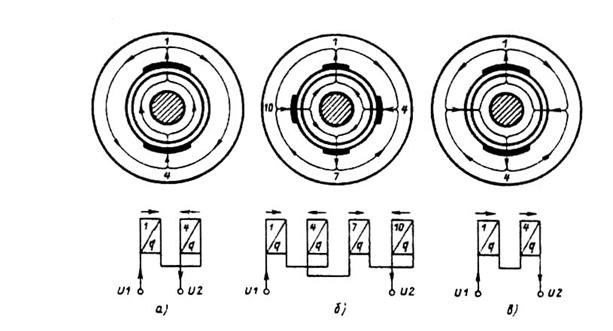
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s - это величина, которая показывает, насколько синхронная частотаn1магнитного поля статора больше, чем частота вращения ротораn2, в процентном соотношении. 
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр-критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме - 1 - 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
megalektsii.ru