Асинхронный короткозамкнутый электродвигатель (рисунок 5.1) и АД с фазным ротором (рисунок 5.2) широко распространены в электроприводе благодаря большому ресурсу безотказной работы, высоким показателям в работе, хорошим регулировочным свойствам.
На рисунке 5.3 представлена схема замещения одной фазы электродвигателя с учетом параметров намагничивающего контура с активным rm и индуктивным xm сопротивлениями.
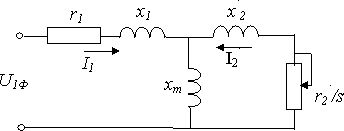


В схеме замещения:
r1 - активное сопротивление фазы статорной обмотки;
r2′ - приведенное к статору активное сопротивление фазы роторной обмотки;
x1 - индуктивное сопротивление фазы статорной обмотки;
x2′ - приведенное к статору индуктивное сопротивление фазы роторной обмотки;
xm - индуктивное сопротивление контура намагничивания.
В соответствии со схемой замещения, роторный ток I2’ имеет значение

Из (5.1) следует, что роторный ток I2’ зависит от скольжения s, т.е. от частоты вращения ротора машины, поскольку

Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0), а при частоте вращения w=w0 идеального холостого хода скольжение равно s = 0. Из соотношения следует также, что при пуске роторный ток достигает максимального значения I2к’@ (8¸10)Iном, и его следует ограничивать.
Частота тока ротора fp при значении частоты fc сетевого напряжения fp = fc×s, следовательно, при пуске s=1 и асинхронная машина может быть представлена трансформатором напряжения, поскольку fp=fc =50Гц. По мере разгона двигателя и его работе с номинальным скольжением sн, которое не превышает sн 0,1; падает и частота роторного тока fp = 1..5Гц.
Мощность Р1, потребляемая АД из сети, расходуется на покрытие потерь в контуре намагничивания ∆Рm и в обмотке статора ∆Р1, остаток ее преобразуется в электромагнитную мощность РЭ , которая равна

В свою очередь,  , и, решая совместно и находим значение электромагнитного момента
, и, решая совместно и находим значение электромагнитного момента
 .
.
Зависимость (5.4) является описанием механической характеристики АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:
 .
.
Зависимость имеет максимум при критическом значении скольжения, равном

и критическом (максимальном) моменте

Заметим, знак (+) относится к двигательному режиму, а знак (-) к генераторному режиму машины.
Для практических расчетов, удобнее использовать формулу Клосса, полученную из выражений
 , где
, где  .
.

В крупных асинхронных машинах r1 << r2’ , и ε ≈0. Механическая характеристика АД имеет вид, изображенный на рисунке 2.4. Характерные точки характеристики:
1- s=0; М=0, при этом скорость двигателя равна синхронной;
2- s=sном, М=Мном - номинальный
режим работы двигателя;
3- s = sк, М = Мкр.Д - максимальный момент в двигательном режиме;
4- s = 1, М = Мп - начальный пусковой момент;
5- s = -sк, М = Мкр.Г - максимальный момент в генераторном режиме.
Анализируя влияние напряжения питания U на механические характеристики электродвигателя, имеем на основании соотношений (5.6) и (5.7), что критическое скольжениеsкостается постоянным при понижении напряжения, а критический момент Mкр.д уменьшается пропорционально квадрату питающего напряжения (рисунок 5.5).
При понижении сетевого напряжения до значения 0,9×Uном, т.е. на 10% от Uном, критический момент Mкр.д уменьшается на 19%. При снижении питающего напряжения для развития прежнего значения момента двигатель должен работать с большими роторными токами.
При проектировании электродвигателя следует убедиться, что значение пускового (s = 1) и критического моментов (s = sк) при минимально возможном напряжении удовлетворяют требованиям рабочей машины.
Анализируя влияние активного сопротивления, вводимого в роторную цепь, на основании соотношений (5.5)-(5.6), что с увеличением роторного
сопротивления, которое становится равным (r2’ + Rдоб), увеличивается критическое скольжение Sк, но величина критического момента двигателя Mкр.д остается без изменения.
Механические характеристики приведены на рисунке 12. Метод используется для запуска машины, когда на время пуска в роторную цепь включается значительное по величине Rдоб. Диаграмма запуска аналогична диаграмме запуска двигателя постоянного тока независимого возбуждения. Для расчета искусственных механических характеристик при введении сопротивления Rдоб в роторную цепь используется соотношение

где sи и se – скольжения соответственно на искусственной и естественной характеристиках.
Зная величину Rдоб, вводимого в роторную цепь, для тех же значений момента по соотношению (5.8) производится расчет скольжений sи на искусственной характеристике.
Введение активно – индуктивных сопротивлений в роторную цепь машины (рисунок 14) используется для поддержания большего постоянства пускового момента машины по сравнению с естественной характеристикой машины – механическая характеристика машины в области скольжений 1<s<sк представляется более плавной кривой.
Критический момент машины Mкр.д и критическое скольжение sк машины изменяются в соответствии с соотношениями. Введение активных и индуктивных сопротивлений в статорную цепь машины (рисунок ) используется для уменьшения броска пускового тока машины, поскольку напряжение непосредственно на зажимах статора становится функцией тока и по мере уменьшения пускового тока (разгон) указанное напряжение растет и восстанавливается до значения, близкого к Uном. Вывод активных и индуктивных сопротивлений из статорной цепи машины осуществляется релейно - контакторной или бесконтактной схемой.
studfiles.net
|
| Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валуn = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристикиполучаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики. Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. |
Выражение для электромагнитного момента (*) справедливо для любого режима работы и может быть использовано для построения зависимости момента от скольжения при изменении последнего от +∞ до −∞ (рис. 2.14).

Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при пуске в ход (S=1) как Mпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение момента – критическим моментом Mкр. Отношение критического момента к номинальному называют перегрузочной способностью двигателя
Mкр/Mн=λ=2÷3.
Из анализа формулы (*) на максимум можно получить соотношения для Mкр и Sкр
| Mкр=Cм | U12 | ; Sкр≈ | R2 | . |
| 2X2 | X2 |
Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.
Из выражения (*), разделив M на Mкр, можно получить формулу, известную под названием «формула Клосса», удобную для построенияM=f(S).
|
| M | = | 2 |
| Mкр | S/Sкр+Sкр/S |
Если в эту формулу подставить вместо M и S номинальные значения момента и скольжения (Mн и Sн), то можно получить соотношение для расчета критического скольжения.
 .
.
Участок характеристики (рис. 2.14), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Mн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется отSкрдо 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Энергетическая диаграмма АД
Преобразование активной мощности в двигателе связано с потерями. Они делятся на электрические, магнитные и механические.
Отобразим энергетическую диаграмму двигателя, описывая энергетические процессы, протекающие в двигателе.

 –активная мощность, потребляемая двигателем из сети.
–активная мощность, потребляемая двигателем из сети.

Часть мощности  теряется на нагрев обмотки статора
теряется на нагрев обмотки статора . Другая часть мощности рассеивается на магнитные потери в сердечнике статора
. Другая часть мощности рассеивается на магнитные потери в сердечнике статора .
.
Остальная мощность с помощью основного магнитного потока передается из статора в ротор и является электромагнитной мощностью двигателя.
Часть электромагнитной мощности расходуется на нагрев обмотки ротора. Магнитные потери в сердечнике ротора малы и  , а частота
, а частота . Поэтому магнитные потери в сердечнике ротора не указываются.
. Поэтому магнитные потери в сердечнике ротора не указываются.
 –механическая мощность двигателя. Механические потери обусловлены трением вала ротора в подшипниках и сопротивлением воздуха.
–механическая мощность двигателя. Механические потери обусловлены трением вала ротора в подшипниках и сопротивлением воздуха.
Уравнение баланса активной мощности имеет вид:


При проектировании и эксплуатации АД представляет интерес соотношение между активной и реактивной мощностями, называемое коэффициентом мощности:

Q1=const, не зависит от нагрузки
Р1 повышается с повышением нагрузки, а, следовательно, повышается cosφ

studfiles.net
Расчётные формулы электродвигателей
Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а

где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в.
Синхронное число оборотов электродвигателя

где р —число пар полюсов обмотки статора электродвигателя, f — частота.
Номинальное число оборотов асинхронного электродвигателя

где s — скольжение асинхронного электродвигателя, %.
Скольжение асинхронного электродвигателя, %

Номинальный момент вращения электродвигателя, кГ·м

где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ.
Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек

где  квт — сумма потерь в электродвигателе.
квт — сумма потерь в электродвигателе.
Окружная скорость (шкива, вала, коллектора, ротора), м/сек.

где D — диаметр соответствующего элемента машины, м.
Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора

где прег — пониженное число оборотов двигателя в минуту;
ηрег — к. п. д. при пониженном числе оборотов.
Соотношения между единицами измерения работы

Соотношения между единицами измерения мощности

trudova-ohrana.ru
Расчётные формулы электродвигателей
Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а
где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в.
Синхронное число оборотов электродвигателя
где р —число пар полюсов обмотки статора электродвигателя, f — частота.
Номинальное число оборотов асинхронного электродвигателя
где s — скольжение асинхронного электродвигателя, %.
Скольжение асинхронного электродвигателя, %
Номинальный момент вращения электродвигателя, кГ·м
где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ.
Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек
где квт — сумма потерь в электродвигателе.
Окружная скорость (шкива, вала, коллектора, ротора), м/сек.
где D — диаметр соответствующего элемента машины, м.
Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора
где прег — пониженное число оборотов двигателя в минуту;
ηрег — к. п. д. при пониженном числе оборотов.
Соотношения между единицами измерения работы
Соотношения между единицами измерения мощности
trudova-ohrana.ru
Рассуждая аналогично случаю с приведенным трансформатором составим основные уравнения асинхронного двигателя.
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора:
 В роторной обмотке аналогичное уравнение будет иметь вид:
В роторной обмотке аналогичное уравнение будет иметь вид:
 Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
 Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 где
где

Для того чтобы параметры ротора и статора изобразить на одной векторной диаграмме асинхронного двигателя, произведем приведение параметров обмотки ротора к параметрам обмотки статора. При этом обмотку ротора с числом фаз m2, обмоточным коэффициентом k2 и числом витков W2 заменяют обмоткой с m1×k1×W1, соблюдая при этом энергетический баланс в роторе.
Не останавливаясь на методике приведения параметров, которая повторяется из статьи «приведенный трансформатор», перепишем основные уравнения приведенного асинхронного двигателя:



www.mtomd.info