Зачастую приходится понижать скорость вращения двигателя, выполняющего определенные задачи в механизме. Уменьшение числа оборотов элеткродвигателя можно добиться с помощью самодельных приборов, управляющих схем стандартного изготовления.
Электродвигатели переменного тока часто используются в деятельности человека, на металлообрабатывающих станках, транспорта, крановых механизмов и другого оборудования. Двигатели превращают энергию переменного тока питания во вращение вала и агрегатов. Используются в основном асинхронные двигатели переменного тока.
Ротор, а также и статор двигателя состоят из катушек провода, уложенного в сердечник, изготовленный из специальной стали. Классификация электродвигателей следует от способа закладки обмотки.
Обмотка из латунных и медных стержней вставляется в сердечник, по краям устанавливаются кольца. Такая катушка провода называется короткозамкнутым (КР) ротором. Электродвигатели небольшой мощности имеют стержни, а также диски, которые были отлиты вместе. Для электродвигателей с мощным моментом детали отливаются отдельно, затем свариваются. Обмотка статора может быть подключена двумя методами: треугольником, звездой.

Фазный ротор состоит из 3-фазной роторной обмотки, подключенной контактными кольцами и щетками к питанию. Обмотка соединена «звездой».

Распространенным двигателем на станках и подъемных устройствах является двигатель с короткозамкнутым ротором, поэтому пример для расчета следует брать для него. Сетевое напряжение поступает на статорную обмотку. Обмотки смещены друг от друга на 120 градусов. Возникшее поле электромагнитной индукции возбуждает электрический ток в обмотке. Ротор начинает работать под действием ЭМС.
Основной характеристикой работы двигателя является число оборотов в минуту. Рассчитываем это значение:
n = 60 f / p, обор / мин;
где f – частота сети, герц, р – количество полюсов статора (в парах).
На корпусе электродвигателя имеется табличка с техническими данными. Если ее нет, то можно самому рассчитать число оборотов вала оборудования по другим имеющимся данным. Расчет производится тремя способами.

2 p = Z1 / y, где 2р – количество полюсов, Z1 – число пазов в статоре, у – шаг обмотки.
Выбираем из таблицы подходящие обороты двигателя:

2p = 0,35 Z1 b / h или 2 p = 0,5 Di / h,
где 2р – количество полюсов, Z1 – число пазов, b – размер зуба, см, h – высота спинки, см, Di – диаметр по зубцам, см.
По результатам расчета и индукции следует число витков обмотки, сравнивается со значениями мотора по паспорту.
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
Регулировка частоты и напряжения с помощью частотного преобразователя, путем создания дополнительной катушки с переключением полюсов пар, являются самыми востребованными способами.
Существует множество частотных преобразователей для асинхронных двигателей, а также различных регуляторов для них. Самостоятельно возможно изготовить прибор для регулировки частоты, применяя транзисторы или тиристоры. Прибор работает как в быту, так и для станочного оборудования, крановых механизмов, различных регулируемых приводов агрегатов.
Мощный регулятор частоты и напряжения показан на схеме. Прибор плавно изменяет параметры привода, экономит энергию, снижает расходы на обслуживание.
Для применения этой схемы в быту, она сложная. Если использовать симистор рабочим элементом, то схема упрощается, и выглядит иначе.

Регулировка будет происходить работой потенциометра, определяюцим фазу импульса входа, и открывающего симистор.

Эффект эксплуатации станков, обрабатывающих металл, подъемных устройств также следует из вращения двигателя, как и сами его эксплуатационные параметры. В продаже имеется множество приборов для регулировки частоты, однако можно вполне собрать такой прибор собственными силами.
Если проанализировать цены и функции преобразователей частоты, то можно понять, что по цене определяется количество встроенных функции частотного преобразователя. Дорогие модели обладают большой функциональностью. Но для выбора прибора лучше руководствоваться требуемыми условиями применения.
Если кабель для подключения на 220 В с 1-й фазой, применяется схема «треугольника». Нельзя подключать частотник, если выходной ток выше 50% от номинального значения.
Если кабель питания на три фазы 380 В, то делается схема «звезды». Чтобы проще было подключать питание, предусмотрены контакты и клеммы с буквенными обозначениями.
В приборе должна быть колодка с клеммой подключения к земле. Подробней, как подключить, здесь.
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний по обслуживанию:
Электроэнергия постоянно дорожает, руководители организаций вынуждены экономить разными путями. В условиях промышленного производства большая часть энергии расходуется механизмами, имеющими электродвигатели.
Изготовители устройств для электротехнических машин и агрегатов предлагают специальные устройства и приборы для управления электромоторами. Такие устройства экономят энергию электрического тока. Они называются инверторами или частотными преобразователями.
Финансовые затраты на покупку частотника не всегда оправдывают экономию средств, так как стоимость их сопоставима со стоимостью сэкономленной энергии. Не всегда привод механизма можно быстро оснастить инвертором. Какие сложности при этом возникают? Разберем способы запуска асинхронных двигателей для пониманию достоинств инверторов.
Можно определить 4 метода пуска двигателей.
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
Экономия рассчитывается:

где Э – экономия денег в рублях;
Рпч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Модуль №4. Частотное регулирование скорости асинхронного двигателя
 Watch this video on YouTube
Watch this video on YouTube chistotnik.ru
Иногда в процессе работы необходимо определить количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далеко не каждый электрик с этой задачей может справиться. Но в этом нужно разбираться. Определить количество оборотов электродвигателя очень легко и просто.

Асинхронный электродвигатель АС-82-4.
Определяем его по обмотке. Для этого надо снять крышку двигателя. Лучше это проделывать с задней крышкой, т. к. шкив или полумуфту снимать не надо.
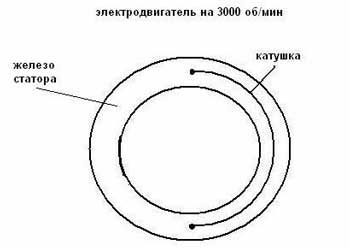
Достаточно снять кожух охлаждения и крыльчатку - и крышка двигателя окажется доступна. После снятия крышки обмотку видно достаточно хорошо. Найдите одну секцию и смотрите, сколько места она занимает по окружности круга (статора). А теперь запоминайте: если катушка занимает половину круга (180 град.), это двигатель на 3000 об./мин.
Если в окружности вместится три секции (120 град.), это двигатель 1500 об./мин. Если в статоре вмещается четыре секции (90 град.), этот двигатель на 1000 об./мин.
Вот так совсем просто можно определить количество оборотов "неизвестного" электродвигателя. На представленных рисунках это видно хорошо.
Это метод определения подходит, когда катушки обмоток намотаны секциями. А бывают обмотки "всыпные", и тут данный методом не подойдет. Но "всыпные" обмотки встречается редко.

Цифровой лазерный тахометр.
Есть еще один метод определения количества оборотов. В роторе электродвигателя есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем вращать ротор. Эту ЭДС можно "поймать" миллиамперметром. Наша задача заключается в следующем: нужно найти обмотку одной фазы, независимо от того как соединены обмотки, треугольником или звездой. К кончикам обмотки подключаем миллиамперметр. Вращая вал двигателя, смотрим, сколько раз отклонится стрелка миллиамперметра за один оборот ротора.
Вот по этой таблице можно посмотреть, что за двигатель перед вами:
В СССР выпускался прибор ТЧ10-Р, может, у кого сохранился. Для тех, кто не видел и не знал о таком измерителе, прилагаю фото. В комплекте имеется две насадки: для измерения оборотов по оси вала и для измерения по окружности вала.
Измерить колличество оборотов можно и с помощью цифрового лазерного тахометра
Технические характеристики:
Поделитесь полезной статьей:
Topfazaa.ru

Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух

Катушка
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько

Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.

Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.

Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min(2p) 4 1500 r/min(2p) 6 1000 r/min(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”

“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / миРазрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболееТочность: + / – 0,05%Рабочее расстояние: 50mm ~ 500mmТакже указывается малое и наибольшее значениеДля тех кому реально необходимо – просто супер вещь!Л. Рыженков
elektrica.info
Асинхронные двигатели используются в станках и прочем оборудовании, как электроприводы, для приведения в действие движущихся частей. Их широкое применение обусловлено простой конструкцией и сравнительно небольшой стоимостью. В этих условиях важное значение имеет регулировка оборотов асинхронного двигателя, позволяющая работать в самых разных условиях. Стандартные схемы предусматривают механические системы передач, которые не очень удобны при определенных обстоятельствах. Электрическое управление дает ряд преимуществ, несмотря на все сложности, связанные с подключением.
Электрическая регулировка скорости позволяет точно и плавно настраивать необходимые рабочие режимы. Эта операция может производиться сразу несколькими способами, связанными с изменениями параметров двигателя и электрического тока.

Прежде всего, может изменяться напряжение, подаваемое на статор, а также вспомогательное сопротивление роторной цепи. Кроме того, скорость вращения связана с изменением количества пар полюсов и частотой тока.
При последних двух способах, изменение скорости вращения происходит без существенного снижения мощности и потерь коэффициента полезного действия. Все они имеют свои достоинства и недостатки, но, в целом, успешно используются для регулировки. Эти способы считаются наиболее подходящими для асинхронных двигателей с конструкцией короткозамкнутого ротора. Именно эти двигатели чаще всего используются в производственной сфере.
Чаще всего применяется частотное регулирование, которое производится с помощью полупроводниковых преобразователей. Их действие основано на особенностях асинхронных двигателей. Здесь магнитное поле вращается с частотой, связанной с частотой, которая имеется у напряжения электрической сети.

Для того, чтобы работа двигателя была эффективной, одновременно с частотой, необходимо изменять и напряжение. Изменение значения напряжения находится в тесной связи с моментом нагрузки. При постоянной нагрузке, напряжение будет изменяться в пропорции с показателем частоты.
С помощью современных приборов, регулировка оборотов асинхронного двигателя может производиться в самом широком диапазоне. При необходимости, можно применять ускорение или замедление агрегатов, в зависимости от тех или иных технологических операций. Для задания нужных параметров используются специальные модули управления. Силовыми переключателями служат специальные транзисторы повышенной мощности. При высокой частоте переключения искажения тока получаются наиболее минимальными.
electric-220.ru
 Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна

При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.

Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.

Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.

При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также - Торможение асинхронного двигателя
electroandi.ru

Зачастую, покупая с рук электродвигатель, автовладелец (и не только) в последующем обнаруживает, что к нему нет никакой документации. В таком случае, как правило, приходится самостоятельно определять обороты электродвигателя, а многие, как свидетельствует практика, не знают, как это сделать. Данная статья расскажет, как определить обороты электродвигателя самостоятельно и, что следует при этом знать.
1. На сегодняшний день асинхронные электродвигатели подразделяются на три группы, каждая из которых говорит об индивидуальном обращении ротора в минуту. Первая группа – электродвигатели, делающие 1000 оборотов в минуту. Стоит сразу заметить, что данная цифра немного преувеличена, так как двигатель асинхронный.
Он делает, как правило, около 950-970 оборотов, но для удобства специалисты такие цифры решили округлить. Ко второй группе относятся двигатели, количество обращений ротора которых составляет 1500 за минуту. Эта цифра так же округленная, на самом деле электродвигатель делает 1430—1470 оборотом в минуту.
Третья группа асинхронных электродвигателей – это группа, к которой относится деталь, ротор которой оборачивается вокруг себя три тысячи раз за одну минуту. Реальная цифра оборотов – 2900-2970.
2. Для того, чтобы определить обороты электродвигателя, вам сначала нужно выявить, к какой же именно из указанных выше групп он относится. Для этого откройте одну из его крышек и найдите под низом катушку обмотки. Помните, такая катушка может состоять, как из одной детали, так и из нескольких, в частности трех-четырех. Кроме всего прочего знайте, что подобных катушек в электродвигателе может быть несколько. Вам достаточно одной, до которой, чтобы рассмотреть, нужно меньше всего прикладывать усилий.
3. Внимание! Катушки между собой связаны определенными деталями, которые иногда мешают рассмотреть нужную информацию. Ни при каких обстоятельствах нельзя отсоединять ничего друг от друга. Внимательно приглядитесь к выбранной вами детали и попробуйте приблизительно определить размер катушки относительно кольца статора.

4. Данное расстояние, чтобы узнать обороты электродвигателя, вовсе не нужно определять до точности. Приблизительные расчеты подойдут вам.
Если размер катушки, примерно, закрывает собой половину кольца статора, то скорость вращения ротора – три тысячи оборотов в минуту.
Если размер катушки покрывает, приблизительно, треть самого кольца, электродвигатель будет относиться ко второй группе и, следовательно, число оборотов, которые он сможет совершать, не будет превышать отметки 1500 за минуту.

Когда размер катушки равен одной четвертой по отношению к кольцу – число оборотов электродвигателя будет 1000 оборотов за одну минуту и, соответственно, двигатель будет относиться к третьей группе.

Не забывайте, что указанные цифры – это всего лишь приблизительная картина вращения, в реальности они могут отличаться и это зависит от множества факторов.
Эти статьи вам тоже пригодятся:
♦ Супер-лупа со светодиодами
♦ Как получить электричество с помощью радиоволн
♦ Самый простейший МР3 усилитель
♦ Антенна для телевизора из пивных банок
Теперь посмотрите это полезное видео:
Будем благодарны, если Вы поделитесь этой статьей здесь:Этот сайт читают уже более 950 человек! Вы тоже можете получать новые материалы по почте:
mas-te.ru
 Более всераспространены последующие методы регулирования скорости асинхронного мотора: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, мотора изменение частоты питающего напряжения, также переключение числа пар полюсов.
Более всераспространены последующие методы регулирования скорости асинхронного мотора: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, мотора изменение частоты питающего напряжения, также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного мотора методом введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к повышению утрат мощности и понижению частоты вращения ротора мотора за счет роста скольжения, так как n = nо (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала мотора миниатюризируется.
Твердость механических черт существенно понижается с уменьшением частоты вращения, что ограничивает спектр регулирования до (2 — 3) : 1. Недочетом этого метода являются значимые энергопотери, которые пропорциональны скольжению. Такое регулирование может быть только для мотора с фазным ротором.
 Регулирование частоты вращения асинхронного мотора конфигурацией напряжения на статоре
Регулирование частоты вращения асинхронного мотора конфигурацией напряжения на статоре
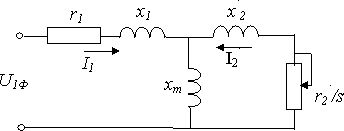
Изменение напряжения, подводимого к обмотке статора асинхронного мотора, позволяет регулировать скорость при помощи относительно обычных технических средств и схем управления. Для этого меж сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя врубается регулятор напряжения.
При регулировании частоты вращения асинхронного мотора конфигурацией напряжения, подводимого к обмотке статора, критичный момент Мкр асинхронного мотора меняется пропорционально квадрату подводимого к движку напряжения Uрет (рис. 3), а скольжение от Uрег не зависит.

Рис. 1. Механические свойства асинхронного мотора с фазным ротором при разных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного мотора методом конфигурации напряжения на статоре

Рис. 3. Механические свойства асинхронного мотора при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то движок не будет крутиться, потому нужно запустить его при номинальном напряжении 17ном либо на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных движков таким методом можно только при вентиляторном нраве нагрузки. Не считая того, должны употребляться особые электродвигатели с завышенным скольжением. Спектр регулирования маленький, до nкр.
Для конфигурации напряжения используют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

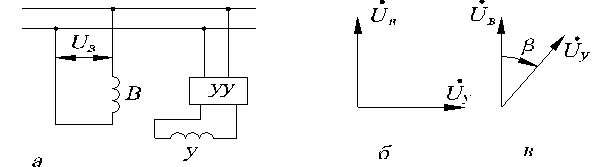
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный движок (ТРН — АД)
Замкнутая схема управления асинхронным движком, выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного мотора с завышенным скольжением (такие движки используются в вентиляционных установках).
Регулирование частоты вращения асинхронного мотора конфигурацией частоты питающего напряжения
Потому что частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного мотора можно создавать конфигурацией частоты питающего напряжения.
 Принцип частотного способа регулирования скорости асинхронного мотора состоит в том, что, изменяя частоту питающего напряжения, можно в согласовании с выражением при постоянном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.
Принцип частотного способа регулирования скорости асинхронного мотора состоит в том, что, изменяя частоту питающего напряжения, можно в согласовании с выражением при постоянном числе пар полюсов р изменять угловую скорость nо магнитного поля статора.
Этот метод обеспечивает плавное регулирование скорости в широком спектре, а механические свойства владеют высочайшей жесткостью.
Для получения больших энергетических характеристик асинхронных движков (коэффициентов мощности, полезного деяния, перегрузочной возможности) нужно сразу с частотой изменять и подводимое напряжение. Закон конфигурации напряжения находится в зависимости от нрава момента нагрузки Мс. При неизменном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические свойства АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические свойства асинхронного мотора при частотном регулировании
С уменьшением частоты f критичный момент несколько миниатюризируется в области малых частот вращения. Это разъясняется возрастанием воздействия активного сопротивления обмотки статора при одновременном понижении частоты и напряжения.
Частотное регулирование скорости асинхронного мотора позволяет изменять частоту вращения в спектре (20 — 30) : 1. Частотный метод является более многообещающим для регулирования асинхронного мотора с короткозамкнутым ротором. Утраты мощности при таком регулировании невелики, так как малы утраты скольжения.
 Большая часть современных преобразователей частоты выстроено по схеме двойного преобразования. Они состоят из последующих главных частей: звена неизменного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большая часть современных преобразователей частоты выстроено по схеме двойного преобразования. Они состоят из последующих главных частей: звена неизменного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено неизменного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение неизменного тока.
Силовой трехфазный импульсный инвертор содержит 6 транзисторных ключей. Любая обмотка электродвигателя подключается через соответственный ключ к положительному и отрицательному выводам выпрямителя. Инвертор производит преобразование выпрямленного напряжения в трехфазное переменное напряжение подходящей частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей употребляются силовые IGBT-транзисторы. По сопоставлению с тиристорами они имеют более высшую частоту переключения, что позволяет производить выходной сигнал синусоидальной формы с наименьшими искажениями. Регулирование выходной частоты Iвых и выходного напряжения осуществляется за счет частотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного мотора переключение числа пар полюсов
Ступенчатое регулирование скорости можно выполнить, используя особые многоскоростные асинхронные движки с короткозамкнутым ротором.
Из выражения nо = 60f/р следует, что при изменении числа пар полюсов р получаются механические свойства с разной частотой вращения nо магнитного поля статора. Потому что значение р определяется целыми числами, то переход от одной свойства к другой в процессе регулирования носит ступенчатый нрав.
Существует два метода конфигурации числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с различным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во 2-м случае обмотку каждой фазы составляют из 2-ух частей, которые соединяют параллельно либо поочередно. При всем этом число пар полюсов меняется вдвое.

Рис. 7. Схемы переключения обмоток асинхронного мотора: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости методом конфигурации числа пар полюсов экономно, а механические свойства сохраняют твердость. Недочетом этого метода является ступенчатый нрав конфигурации частоты вращения асинхронного мотора с короткозамкнутым ротором. Выпускаются двухскоростные движки с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Применены материалы книжки Дайнеко В.А., Ковалинский А.И. Электрическое оборудование сельскохозяйственных компаний.
Школа для электрика

elektrica.info