В последние 10-25 лет установилась четкая тенденция на переход от привода постоянного тока к приводу переменного тока благодаря совершенствованию законов управления двигателями переменного тока и развитию силовой электроники.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно меньшими габаритами и массой по сравнению с двигателями постоянного тока. К недостаткам регулирования скорости можно отнести высокую сложность теории машин переменного тока и алгоритмов управления, закладываемых в преобразовательные устройства.
Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное; 2) изменением напряжения на статоре; 3) переключением числа пар полюсов; 4) изменением частоты питающего напряжения и др.
Реостатное регулирование
Схема включения АД при этом способе регулирования представлена ниже. Реостатные характеристики получаются путем введения в цепь ротора добавочного сопротивления. При этом с ростом сопротивления падает жесткость МХ.
Допустимый диапазон регулирования скорости при данном способе
 .
.
Так как  , то приближенно
, то приближенно
 ,
,
где  – относительная величина изменения скорости;
– относительная величина изменения скорости;  – относительная величина изменения момента.
– относительная величина изменения момента.
Из полученной формулы видно, что при равных относительных отклонениях угловой скорости и момента нагрузки диапазон регулирования  . При более низком допустимом отклонении угловой скорости диапазон оказывается ещё меньше.
. При более низком допустимом отклонении угловой скорости диапазон оказывается ещё меньше.
Потери мощности при реостатном регулировании складываются из переменных потерь, включающих потери в меди статора и ротора и во внешних резисторах роторной цепи, и постоянных – не зависящих от нагрузки. Суммарные постоянные потери в двигателе остаются примерно одинаковыми независимо от нагрузки и скорости двигателя.
Электромагнитная и механическая мощности для АД
 ;
;  ,
,
 |
| Схема включения двигателя при реостатном способе регулирования |
отсюда можно определить потери в роторе
 .
.
Видно, что потери пропорциональны величине скольжения и распределяются пропорционально отношению сопротивлений ротора двигателя и добавочного сопротивления в цепи ротора, поэтому двигатель при реостатном регулировании может развивать момент, равный номинальному.
Недостатками реостатного регулирования скорости являются ступенчатое регулирование скорости и использование дополнительной аппаратуры, невысокое быстродействие и большие потери энергии при регулировании.
Регулирование угловой скорости АД изменением напряжения на статоре
При изменении величины первой гармоники изменяется величина критического момента при постоянстве критического скольжения.
Такое изменение достигается использованием тиристорного преобразователя напряжения (ТПН).
Максимальный момент при уменьшении напряжения снижается пропорционально квадрату напряжения:
 ,
,
где  – критический момент при сниженном напряжении;
– критический момент при сниженном напряжении;  – пониженное напряжение.
– пониженное напряжение.
Из рис. видно, что пределы регулирования скорости весьма ограничены, даже при вентиляторной нагрузке.
Для расширения диапазона используют замкнутые по скорости САР, структурная схема которой представлена на рис. ниже. В состав такой САР сходит датчик скорости (BR) и регулятор скорости, на который поступает разность между заданным  и текущим
и текущим  значением скоростей. На выходе регулятора скорости вырабатывается сигнал, подающийся на вход системы импульсно-фазного управления, которая вырабатывает управляющие импульсы для ТПН. Особенность такого регулирования заключается в том, что все характеристики сходятся в точке синхронной скорости
значением скоростей. На выходе регулятора скорости вырабатывается сигнал, подающийся на вход системы импульсно-фазного управления, которая вырабатывает управляющие импульсы для ТПН. Особенность такого регулирования заключается в том, что все характеристики сходятся в точке синхронной скорости  , поэтому, чем меньше скорость, тем выше скольжение и больше потери в двигателе. Механические характеристики двигателя при фазовом управлении в замкнутой САР скорости представлены на рис. 5.11.
, поэтому, чем меньше скорость, тем выше скольжение и больше потери в двигателе. Механические характеристики двигателя при фазовом управлении в замкнутой САР скорости представлены на рис. 5.11.
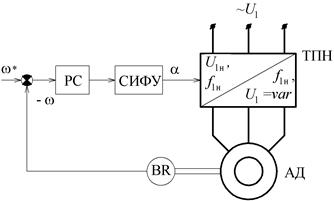 |  |
| Структурная схема замкнутой САР скорости АД при фазовом управлении | Механические характеристики САР скорости АД при фазовом управлении |
Двигатель при таком способе регулирования может работать продолжительное время при условии
 .
.
Допустимый момент можно найти, приравнивая допустимые потери к номинальным
 ,
,
откуда
 .
.
Кривая допустимого момента по нагреву представлена на рис.5.11.
Данный способ регулирования нельзя применять для механизмов, работающих в продолжительном режиме работе с постоянной нагрузкой. Эффективным оказывается использование фазового регулирования для механизмов, у которых статический момент зависит от скорости двигателя  , например, для приводов вентиляторов, насосов, компрессоров. Этот способ также применим, когда двигатель работает на пониженных скоростях малое время относительно всего цикла работы, например, лифты. В этом случае завышение установленной мощности двигателя невелико.
, например, для приводов вентиляторов, насосов, компрессоров. Этот способ также применим, когда двигатель работает на пониженных скоростях малое время относительно всего цикла работы, например, лифты. В этом случае завышение установленной мощности двигателя невелико.
Достоинством фазового управления является более низкая стоимость преобразователя (ТПН) в сравнении с преобразователем частоты (ПЧ) равной мощности, что позволяет для указанных механизмов обеспечить приемлемое качество технологического процесса без дополнительных затрат.
5.4.3. Изменение числа пар полюсов
Из выражения для угловой скорости АД:
 ,
,
видно, что регулирование скорости можно осуществлять изменением числа пар полюсов p обмотки статора двигателя. Так как данная величина может быть только целым числом, регулирование скорости оказывается ступенчатым.
Для данного вида регулирования изготавливаются многоскоростные АД с КЗР. В пазах сердечника статора размещают либо две независимые обмотки, либо одну полюснопереключаемую.
Различают две основные схемы переключения. Схема «звезда/двойная звезда» (рис. 5.12, I-II) обеспечивает регулирование с постоянством момента. Такую схему целесообразно применять в электроприводе с постоянно действующим моментом нагрузки при изменении частоты вращения. Схема «звезда/звезда» (рис.5.12, I-III) также даёт двукратное изменение числа пар полюсов, однако регулирование происходит при постоянстве мощности, то есть при переключении на повышенную скорость момент уменьшается в два раза. Такие схемы разумно применять в приводах, где момент сопротивления обратно пропорционален частоте вращения. Механические характеристики АД при регулировании скорости изменением числа пар плюсов представлены на рис. ниже.
Многоскоростные АД широко применялись в электроприводах, допускающих ступенчатое регулирование частоты вращения (привода лифтов, вентиляторов, станков). Достоинством такого способа является сохранение высоких экономических показателей при переходе с одной частоты вращения на другую, так как на всех ступенях переключения обмотки статора КПД и коэффициент мощности двигателя остаются практически неизменными. К недостаткам относят большую в сравнении с обычными АД сложность, завышенные габариты, большую стоимость. Кроме того, необходимость переключения обмоток статора на разное число пар полюсов требует усложнения коммутационной аппаратуры, что так же приводит к возрастанию цены электропривода в целом. В настоящее время этот способ вытесняется частотным регулированием.
 |  |
| . Схемы соединения катушечных групп обмоток статора | Механические характеристики АД при переключении числа пар полюсов |
Частотное регулирование скорости асинхронного двигателя
Частотный способ регулирования скорости АД является превалирующим и основным. Чем это обуславливается? В первую очередь в настоящее время развита теория машин переменного тока, что позволило найти оптимальные с некоторых позиций законы управления АД. Развитие промышленной электроники позволило в полной мере реализовать данные законы в «железе».
Существуют системы скалярного, векторного управления и системы прямого управления моментом. Выбор способа и принципа управления определяется совокупностью статических, динамических и энергетических требований к асинхронному электроприводу.
Принцип скалярного управления частотно-регулируемого асинхронного электропривода основан на изменении частоты и текущих значений модулей переменных АД (напряжений, магнитного потока, потокосцеплений и токов цепей двигателя). Этот принцип является наиболее распространённым в связи с тем, что ему свойственна техническая простота измерения и регулирования переменных АД, а так же возможность построения разомкнутых систем управления скоростью. Основной недостаток заключается в трудности реализации желаемых законов регулирования скорости и момента АД в динамических режимах.
Принцип векторного управления связан как с изменением частоты и текущих значений переменных АД, так и с взаимной ориентацией их векторов в полярной или декартовой системе координат. Благодаря контролю положения углов переменных такой способ обеспечивает полное управление АД как в статических, так и в динамических режимах, что даёт заметное улучшение качества переходных процессов по сравнению со скалярным управлением.
Системы прямого управления моментом являются продолжением и развитием систем векторного управления. Задачей прямого управления моментом является обеспечение быстрой реакции электромагнитного момента двигателя на управляющее воздействие. В отличие от векторного управления, где изменение момента производится путем воздействия на ток статора, в системе с прямым управлением моментом управляемой величиной является потокосцепление статора.
Преобразователи частоты, предназначенные для частотно-регулируемых АД, подразделяются по типу связи с питающей сетью на непосредственные ПЧ (НПЧ) и двухзвенные ПЧ (ДПЧ) с промежуточным звеном постоянного или переменного тока.
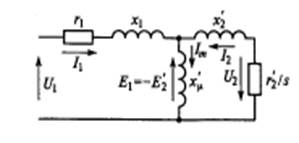
Момент АД пропорционален магнитному потоку  и активной составляющей вторичного тока
и активной составляющей вторичного тока  :
:
 ,
,
где  – конструктивная постоянная АД;
– конструктивная постоянная АД;  – угол сдвига между ЭДС и током ротора;
– угол сдвига между ЭДС и током ротора;
 .
.
Из формулы для момента видно, что уменьшение магнитного потока, являющееся следствием увеличения частоты  , приведет к возрастанию , а следовательно и потерь в роторе
, приведет к возрастанию , а следовательно и потерь в роторе  и одновременному уменьшению допустимого момента двигателя по условиям охлаждения двигателя. Уменьшение частоты при постоянстве амплитуды напряжения
и одновременному уменьшению допустимого момента двигателя по условиям охлаждения двигателя. Уменьшение частоты при постоянстве амплитуды напряжения  , как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона
, как было показано в п. 4.3.3, также не допустимо по условиям насыщения магнитной системы машины. поэтому регулирование скорости двигателя изменением частоты питающего напряжения при условии постоянства момента двигателя приемлемо только при одновременном изменении амплитуды питающего напряжения, то есть выполнении закона  , что обеспечивает практически постоянный магнитный поток в двигателе.
, что обеспечивает практически постоянный магнитный поток в двигателе.
Для реализации указанного закона управления между сетью и двигателем включается преобразователь частоты (ПЧ), обеспечивающий одновременное изменение частоты и амплитуды напряжения на двигателе. При пониженных скоростях у самовентилируемых двигателей уменьшается отвод тепла в окружающую среду, поэтому в таких случаях необходимо снижать допустимый момент на двигателе.
При частотном регулировании по причинам, обусловленными механической прочностью подшипников и элементами ротора, поднимать частоту выше  . Поэтому основной способ регулирования скорости заключается в уменьшении частоты напряжения.
. Поэтому основной способ регулирования скорости заключается в уменьшении частоты напряжения.
Для построения примерного вида механических характеристик примем, что  , тогда уравнение для критического момента можно переписать следующим образом:
, тогда уравнение для критического момента можно переписать следующим образом:
 .
.
Из формулы видно, что критический момент при выполнении закона  остаётся постоянным. Условие пренебрежения активного сопротивления статора корректно при высоких скоростях двигателя, когда
остаётся постоянным. Условие пренебрежения активного сопротивления статора корректно при высоких скоростях двигателя, когда  . При низких скоростях падение напряжения на активном сопротивлении статора
. При низких скоростях падение напряжения на активном сопротивлении статора  становится сопоставимо с величиной напряжения на зажимах статора, что приводит к падению перегрузочной способности двигателя
становится сопоставимо с величиной напряжения на зажимах статора, что приводит к падению перегрузочной способности двигателя  . Для того, чтобы реализовать одинаковую перегрузочную способность при частотном регулировании в области низких частот вращения используют так называемую «IR-компенсацию», которая заключается в том, что на малых скоростях делается добавка напряжения на статоре, компенсирующая
. Для того, чтобы реализовать одинаковую перегрузочную способность при частотном регулировании в области низких частот вращения используют так называемую «IR-компенсацию», которая заключается в том, что на малых скоростях делается добавка напряжения на статоре, компенсирующая  .
.
Диапазон регулирования скорости в разомкнутых системах составляет  . В замкнутых системах диапазон может быть существенно расширен.
. В замкнутых системах диапазон может быть существенно расширен.
 |  |
| Схема включения АД при частотном регулировании | Механические характеристики системы ПЧ-АД |
Основные сложности, возникающие при реализации частотного управления заключаются в следующем:
1) для получения в системах ПЧ-АД свойств аналогичных (или даже превосходящих) свойства систем ТП- ДПТ необходимо получение информации о различных параметрах АД;
2) системы являются сильно нелинейными и для получения высококачественных систем необходимо вводить звенья, компенсирующие нелинейность объекта регулирования;
3) закон не является оптимальным, и требуется корректировка закона, учитывающая  на валу двигателя;
на валу двигателя;
4) в АД входят параметры  , величина которых зависит от степени насыщения машины нелинейно. Кроме этого изменяются значения активных сопротивлений статора и ротора при изменении температуры обмоток двигателя, что также необходимо учитывать.
, величина которых зависит от степени насыщения машины нелинейно. Кроме этого изменяются значения активных сопротивлений статора и ротора при изменении температуры обмоток двигателя, что также необходимо учитывать.
Несмотря на указанные сложности, современные частотные приводы успешно функционируют, обеспечивая высокое качество процесса регулирования скорости.
megaobuchalka.ru
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
 для изменения числа полюсов") Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
 Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
 Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
electrono.ru
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА «ЭЛЕКТРОТЕХНИКА»
Реферат по общей электротехнике
на тему:
«Регулирование скорости (частоты вращения)
асинхронного двигателя»
Выполнил: ст. группы ТОА-328
Скребец П. В.
Проверил: доц. Николаева С.И.
ВОЛГОГРАД 2004
Содержание:
1. Способы регулирования асинхронного двигателя…………………………………3
2. Частотное регулирование асинхронных электроприводов………………………..6
3. Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора…………………………………………………………………………………8
4. Регулирование скорости АД изменением числа пар полюсов…………………...121. Способы регулирования асинхронного двигателя
Асинхронный двигатель является наиболее массовым электрическим двигателем. Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и находят применение во всех отраслях хозяйства. Основным достоинством асинхронного двигателя является простота его конструкции и невысокая стоимость. Однако по принципу своего действия асинхронный двигатель в обычной схеме включения не допускает регулирования скорости его вращения. Особое внимание следует обратить на то, что во избежание значительных потерь энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во избежание перегрева его ротора, двигатель должен работать в длительном режиме с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см. рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения электромагнитного поля статора ω0 и скольжением s:

 Рис.1. Классификация способов регулирования асинхронных двигателей
Рис.1. Классификация способов регулирования асинхронных двигателей Исходя из (1) принципиально возможны два способа регулирования скорости: регулирование скорости вращения поля статора и регулирование скольжения при постоянной величине ω0 .
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой напряжения, подводимого к обмоткам статора f1 , и числом пар полюсов двигателя рп . В соответствии с этим возможны два способа регулирования скорости: изменение частоты питающего напряжения посредством преобразователей частоты, включаемых в цепь статора двигателя (частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля статора для короткозамкнутых асинхронных двигателей возможно путем изменения величины напряжения статора при постоянной частоте этого напряжения. Для асинхронных двигателей с фазным ротором, кроме того, возможны еще два способа: введение в цепь ротора добавочных сопротивлений (реостатное регулирование) и введение в цепь ротора добавочной регулируемой э.д.с. посредством преобразователей частоты, включаемых в цепь ротора (асинхронный вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники созданы и серийно выпускаются различные виды полупроводниковых преобразователей частоты, что определило опережающее развитие и широкое применение частотно-регулируемого асинхронного электропривода. Основными достоинствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механических характеристик, что позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с малыми величинами абсолютного скольжения, и потери в двигателе не превышают номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость (особенно для приводов большой мощности) преобразователей частоты и сложность реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е. плавное регулирование скорости и формирование переходных процессов при этом способе невозможно.
Поэтому данный способ имеет определенные области применения, но не может рассматриваться, как основа для построения систем регулируемого электропривода.
2. Частотное регулирование асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы ω = 2πf1 (1 - s)/p. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U1 ≈ Е1 = kФf1 . Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет, и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
3. Регулирование скорости, тока и момента с помощью резисторов в цепях ротора и статора
Один из распространенных способов регулирования скорости, тока и момента АД с фазным ротором связан с введением и изменением дополнительных резисторов в цепи его ротора. Схема, в которой реализуется этот способ регулирования, приведена на рис. 4.7, а. Основным достоинством этого способа является простота реализации, что определило его широкое применение в ряде электроприводов.
Для построения семейства получаемых при этом способе искусственных механических характеристик проведем анализ их характерных точек. С помощью выражения для скорости идеального холостого хода ω0 = ρf1/p отмечаем следующее:
1) скорость идеального холостого хода АД ω0 при регулировании Rд2 не изменяется;
2) максимальный (критический) момент двигателя Мк также остается неизменным;
3) критическое скольжение Sк увеличивается при увеличении R2д .
Использование этих характеристик для регулирования скорости АД характеризуется такими же показателями, что и для ДПТ независимого возбуждения. Диапазон регулирования скорости небольшой — около 2 — 3, что определяется снижением жесткости характеристик и ростом потерь по мере увеличения диапазона регулирования скорости.
Плавность регулирования при реостатном регулировании небольшая и определяется плавностью изменения дополнительного резистора R2д. Скорость АД изменяется только вниз от основной.
Экономичность способа определяется стоимостью используемых средств регулирования и расходами при эксплуатации электропривода. Затраты, связанные с созданием данной системы электропривода, невелики, так как для регулирования обычно используются простые и дешевые ящики металлических резисторов. В то же время при эксплуатации этой системы затраты велики, поскольку значительны потери энергии.
Электрические потери в роторной цепи ΔР2, называемые потерями скольжения. Чем больше скольжение s, тем больше потери в роторной цепи, поэтому реализация большого диапазона регулирования скорости приводит к значительным потерям энергии и снижению КПД электропривода.
mirznanii.com
Из уравнения механической характеристики (97) вытекает, что регулирование скорости вращения асинхронных электродвигателей можно осуществить:
изменением частоты питающего тока;
изменением числа «ар полюсов обмотки статора;
введением дополнительных сопротивлений в цепь обмотки ротора.
Первые два способа используются для регулирования скорости вращения электродвигателей с короткозамкнутым ротором, а последний — электродвигателей с фазным ротором (с контактными кольцами).
Регулирование скорости вращения изменением частоты питающего тока используется очень редко, так как этот способ применим лишь в случае, когда электродвигатель питается от отдельного генератора. В этом случае для регулирования скорости необходимо менять скорость вращения питающего генератора в такой же пропорции, е какой должна меняться скорость регулируемого электродвигателя. Бели же электродвигатель питается от сети трехфазного тока, то осуществить регулирование его скорости изменением частоты невозможно. На практике регулирование скорости изменением частоты применяется лишь в. гребных электрических установках переменного тока, в которых мощные гребные электродвигатели получают питание от отдельных генераторов и поэтому частоту питающего тока можно регулировать произвольно.
Наиболее часто на практике применяется второй способ, позволяющий достаточно просто осуществлять ступенчатое регулирование скорости вращения асинхронных электродвигателей с короткозамкнутым ротором. Если имеется возможность изменять число пар полюсов обмотки статора [см. формулу (80)] то, следовательно, имеется возможность ступенчатого регулирования скорости вращения электродвигателя, так как число пар полюсов может быть равно 1, 2, 3 и т. д. Электродвигатели, допускающие переключение числа пар полюсов, должны иметь в пазах статора либо несколько независимых обмоток, либо одну обмотку со специальным переключающим устройством. Отечественная промышленность выпускает двух-, трех- и четырех- скороетные электродвигатели, используемые :в основном на морском транспорте и на некоторых кранах. Когда числа полюсов значительно отличаются друг от друга, двух скор осиные электродвигатели изготовляются с двумя независимыми обмотками. Одна, например, может быть выполнена на 2р = 2, а вторая на 2р = 8 полюсов. Тогда при подключении к сети первой обмотки магнитное поле статора будет вращаться со скоростью n1 = 60·50 / 1 = 3000 об /мин, а при подключении к сети второй обмотки — со скоростью n1 = 60·50 / 4 = 750 об /мин. Соответствующим образом будет изменяться при этом и скорость вращения ротора n2 = n1 (1—s).
Часто в пазы статора двухскоростного электродвигателя закладывают одну обмотку, но выполняют ее так, чтобы можно было включать ее при необходимости треугольником (рис. 49, а) и двойной звездой (рис. 49, б). При включении такой обмотки треугольником число полюсов равно 2р = 2а, а при включении двойной звездой 2р = а (где а — любое целое число), т. е. при переходе от треугольника к двойной звезде число пар полюсов статорной обмотки уменьшается вдвое, а скорость электродвигателя возрастает вдвое.
Регулирование переключением числа пар полюсов применяется только для электродвигателя с короткозамкнутым ротором, потому что у электродвигателей с фазным ротором одно

временно с переключением обмотки статора требуется переключать и обмотку ротора, что усложняет конструкцию электродвигателя и переключающего устройства. Данный способ регулирования скорости отличается высокой экономичностью, но он не лишен и недостатков. В частности, регулирование скорости происходит не плавно, а скачками, требуется довольно сложное переключающее устройство, в особенности при числе скоростей большем двух; при переходе с одной скорости на другую разрывается цепь статора, при этом неизбежны толчки тока и момента, коэффициент мощности при низших скоростях ниже, чем при высших из-за увеличения рассеяния магнитного потока.
Регулирование скорости введением дополнительных сопротивлений в цепь ротора возможно только у электродвигателей с фазным ротором. Согласно уравнению (97), при введении различных активных сопротивлений в цепь ротора жесткость характеристик изменяется (рис. 50), т. е. при одной и той же нагрузке скорость электродвигателя будет различной. Очевидно, чем выше величина дополнительного сопротивления, тем мягче искусственная характеристика и тем ниже скорость электродвигателя.
Допустим электродвигатель работает с установившейся скоростью n1 на естественной характеристике а в точке 1, развития некоторый вращающий момент М1 = Мc. При введении в цепь ротора некоторого сопротивления R1 электродвигатель перейдет на работу по характеристике b, уравнение которой

Так как в момент включения сопротивления скорость электродвигателя практически не изменится, переход с характеристики а на характеристику b произойдет по горизонтали 1—2, причем вращающий момент электродвигателя снизится до М2, который меньше момента сопротивления механизма М, поэтому скорость электродвигателя будет падать, а скольжение возрастать. При возрастании скольжения момент, согласно выражению (92), увеличивается до тех пор, пока момент электродвигателя вновь не станет равным моменту сопротивления механизма, после чего наступит равновесие моментов и двигатель будет вращаться с новой установившейся скоростью n3 (точка 3).
При необходимости дополнительно может быть включено сопротивление R2. Тогда скорость электродвигателя снизится до величины n5. При отключении сопротивлений скорость электродвигателя будет возрастать, при этом переход с одной характеристики на другую происходит в обратном порядке, как показано на рис. 50.
Последний способ позволяет получить широкий диапазон скоростей, но является крайне неэкономичным, так как при увеличении активного сопротивления цепи ротора растут потери энергии в электродвигателе, а значит уменьшается его к. п. д. Сами регулировочные реостаты, особенно для мощных электродвигателей, получаются громоздкими и выделяют много тепла.
Необходимо также иметь в виду, что большинство электродвигателей в настоящее время выполняется с самовентиляцией.
Вследствие этого при понижении скорости вращения охлаждение ухудшается и электродвигатель не может развивать номинальный вращающий момент.
vdvizhke.ru
На современном этапе развития промышленности возникла необходимость для создания управления темпом вращения различными методами и устройствами. Для этого используется регулятор скорости вращения асинхронного электродвигателя.
ОГЛАВЛЕНИЕ
Регулирование скорости асинхронного двигателя может происходить несколькими способами. Самыми популярными являются:

График изменения частоты рабочего тока
Скорость вращения АД возможно настраивать методом изменения частоты переменного тока.
Регулятор осуществляет изменения скорости вращения. Частотное регулирование происходит с помощью полупроводниковых преобразователей. Принцип действия основывается на частоте, которая зависит от частоты питания.
Определить скорость можно по формуле: n1 = 60 f/p , где n1 – значение частоты вращения, p – пары полюсов статора, f – частота питания, 60 – показатель вычисления мерности.
 Для работы двигателя без потерь происходит изменения частоты, напряжения. Последнее зависит от моментов нагрузки. При непрерывной нагрузке, соразмерными становятся напряжение и частота. Частотный регулятор повышает и понижает электрообороты большим масштабом. Благодаря этому, они довольно часто применяются в оборудовании. Например, многоконтактные станки. Скорость вращения электродвигателя приводит в движении намоточный вал, который регулируется полупроводниковым преобразователем.
Для работы двигателя без потерь происходит изменения частоты, напряжения. Последнее зависит от моментов нагрузки. При непрерывной нагрузке, соразмерными становятся напряжение и частота. Частотный регулятор повышает и понижает электрообороты большим масштабом. Благодаря этому, они довольно часто применяются в оборудовании. Например, многоконтактные станки. Скорость вращения электродвигателя приводит в движении намоточный вал, который регулируется полупроводниковым преобразователем.
Принцип действия заключается в двойном преобразовании. В механизм входит выпрямитель, импульсный инвертор, система управления. Синусоидальный поток становится постоянным и поступает на инвертор. Инвертор состоит из переключателей, из них напряжение идёт на статор. Постоянный ток становится переменным необходимой частоты. Параметры устанавливаются модулем управления.
Один из популярных методов управления асинхронными двигателями с короткозамкнутыми роторами. Способ действия: уложить в пазы дополнительные обмотки, уменьшив сечение провода. Что ведёт к уменьшению номинального напряжения. Усложняются коммутация и энергетические характеристики.
 Высокоскоростные двигатели имеют от 2 до 4 скоростей. Они оборудуют лифты, станки, насосы, вентиляторы.
Высокоскоростные двигатели имеют от 2 до 4 скоростей. Они оборудуют лифты, станки, насосы, вентиляторы.
В основе данного способа представлен обыкновенный трансформатор, с отводками от витков и одной электрообмоткой. Экономность происходит по причине неимения повторной обмотки.

загрузка...
Регулятор имеет до 6 стадий. Выходное напряжение будет не искажённым. Трансформатор выдерживает перегрузки. При этом занимает большие размеры.

Регулятор частоты для однофазного устройства
Частотное регулирование является основным методом регулирования мощности асинхронных электродвигателей. Предназначается для трёхфазных АД.
Для однофазных механизмов применяются специальные однофазные преобразователи. Их производит фирма INVERTEK DRIVES.
Специализированный частотный электропреобразователь обеспечивает высокоинтеллектуальное управление. Характеристика функций: поддержка водяного напора, расходование воздуха, регулировка скоростью, сбережение двигателя и удобный интерфейс. Однако стоимость преобразователя дорогая.

Схема электропреобразователя
Для однофазного двигателя можно взять трёхфазный прибор с удалением из него конденсатора. Но при этом длительность работы уменьшиться из-за нагревания обмоток и допустимых замыканий. Преимущества применения очень большой выбор приборов, их низкая стоимость.
Используется два тиристора или симистр. Тиристоры включены одновременно, каждый из них проводит полуволну.

Схема управления скоростью тиристорным регулятором напряжения
В основе системы лежат моменты открытия и закрытия тиристоров. Вначале волны напряжения убирается часть, значение тока имеет изменения. Такая схема применяется в лампах накаливания, димерах.
Устанавливается защитная цепь LRC для защиты ключа силы, для которого используется дроссели, конденсаторы и резисторы. При введении резистора в цепь, мощность теряется. Жёсткость механических характеристик снижается с уменьшением частоты вращения. На выходе добавляется конденсатор, который корректирует форму волны и ограничит мощность напряжения. Тиристоры лучше использовать с большей мощностью для обеспечения беспроблемного старта.
Преимуществом использования тиристоров является их недорогая цена и маленькие размер, вес. К недостаткам можно отнести предпочтительнее применение для маломощных двигателей, возникновение рывков, шума и треска в процессе работы.
ШИМ-регулятор работает по принципу широтной импульсной модуляции. Каскадом на выходе применяются полевые или биполярные транзисторы.

Механические характеристики управления ШИМ-регулятором
Транзисторы на выходе коммутируются с высокой частотой, при смене ширины импульса и времени между ними, изменения касаются напряжения на нагрузке в результате. При коротком импульсе и длинной паузе, напряжение уменьшается и мощность тоже.
Электронный трансформатор занимает меньшее пространство, обладает небольшим весом, стоит недорого. Ток выходит в чистой, неискаженной форме. На низком обороте отсутствует гул. Но прибор должен находиться на расстоянии до 5 метров или можно установить дистанционный регулятор. Можно сделать регулятор своими руками, ничем не хуже промышленного механизма. Его использовать в основе схемы, по которой собрать готовый регулятор.
Разнообразие регуляторов скорости вращения позволяют выбрать подходящий вариант для конкретного устройства. Это обеспечит продуктивность работы высокоскоростного асинхронного электродвигателя.
electricvdele.ru
Скорость вращения ротора асинхронного двигателя определяется выражением n = no (1 — S) = (f1∙60)(1 — S)/p.Отсюда следует, что скорость асинхронного двигателя можно регулировать изменением какой-либо из трех величин: числа пар полюсов р; частоты f1 тока питающей сети; скольжения S.
 Изменение числа пар полюсов на статоре электродвигателя
Изменение числа пар полюсов на статоре электродвигателя Изменение числа полюсов электродвигателя. Для возможности изменения числа пар полюсов электродвигателя статор его выполняют либо с двумя самостоятельными трехфазными обмотками, либо с одной трехфазной обмоткой, которую можно пересоединять на различные числа полюсов.
На рисунке схематически показаны две катушки одной фазы, соединенные последовательно. Катушки создают четыре магнитных полюса. Те же катушки, соединенные параллельно между собой, создадут только два полюса (рис. б). Пересоединение обмоток статора производится при помощи специального аппарата – контроллера. При этом способе регулировка скорости вращения двигателя совершается скачками.
На практике встречаются двигатели, синхронные скорости вращения no которых могут быть равны 3000, 1500, 1000 и 750 оборотов в минуту.
Регулировку скорости вращения двигателя путем изменения числа полюсов можно производить только у асинхронных двигателей с короткозамкнутым ротором. Ротор с короткозамкнутой обмоткой может работать при разных числах полюсов магнитного поля. Наоборот, ротор двигателя с фазной обмоткой может работать нормально лишь при определенном числе полюсов поля статора. Иначе обмотку ротора также пришлось бы переключать, что внесло бы большие усложнения в схему двигателя.
Изменение частоты переменного тока. При этом способе частоту переменного тока, подводимого к обмотке статора двигателя, изменяют при помощи специального преобразователя частоты. Регулировку изменения частоты тока выгодно производить, когда имеется большая группа двигателей, требующих совместного плавного регулирования скорости вращения (рольганги, текстильные станки и т. п.). Этот способ регулирования скорости мало распространен ввиду сложности его осуществления.
Введение сопротивления в цепь ротора. Первые два способа регулировки скорости вращения асинхронного двигателя требуют или специального исполнения двигателя, или наличия специального преобразователя частоты и поэтому широкого распространения не получили. Третий способ регулировки скорости вращения асинхронных двигателей состоит в том, что во время работы двигателя в цепь обмотки ротора вводят сопротивление регулировочного реостата.
С увеличением активного сопротивления цепи ротора возрастает величина скольжения S, соответствующая заданному значению вращающего момента М (величина вращающего момента, развиваемого двигателем, равна моменту сопротивления на валу двигателя). Таким образом, вводя дополнительно активное сопротивление в цепь фазного ротора, мы увеличиваем скольжение S и, следовательно, снижаем скорость вращения ротора n. Такой способ регулирования применим только для асинхронных двигателей с фазным ротором. Регулировочный реостат включают в цепь ротора так же, как и пусковой реостат. Разница между пусковым и регулировочным реостатом состоит в том, что регулировочный реостат рассчитан на длительное прохождение тока. Для двигателей, у которых производится регулировка скорости вращения путем изменения сопротивления в цепи ротора, пусковой и регулировочный реостаты объединяются в один пускорегулировочный реостат. Недостатком этого способа регулирования является то, что в регулировочном реостате происходит значительная потеря мощности, тем большая, чем шире регулировка скорости вращения двигателя.
Реверсирование асинхронных электродвигателей. Для изменения направления вращения (реверсирование) асинхронного двигателя следует поменять местами два любых провода из трех, идущих к обмоткам статора двигателя. При этом меняется направление вращения магнитного поля статора и двигатель станет вращаться в другую сторону. Реверсирование двигателя может быть произведено при помощи переключателя (перекидного рубильника), магнитного пускателя и других устройств.
Торможение асинхронных двигателей. В условиях эксплуатации нередко возникает необходимость торможения двигателя с целью ускорить его остановку.
Торможение электродвигателей может быть механическим, электрическим и электромеханическим. Электромеханическое торможение производится при помощи ленточного или колодочного тормоза, действующего на тормозной шкив, закрепленный на валу двигателя. Ослабление ленты или колодок осуществляется тормозным электромагнитом, обмотка которого соединена параллельно с обмоткой статора двигателя.
Если при работе двигателя переключить две любые фазы, то при этом двигатель начнет развивать вращающий момент, направленный в обратную сторону. Вращение ротора замедляется. Когда скорость вращения приближается к нулю, следует отключить двигатель от сети, в противном случае под действием развиваемого момента он начнет вращаться в противоположном направлении. Применяются и другие способы электрического торможения асинхронных электродвигателей.
www.gerset.ru
| Контрольное задание Контрольное задание выдается в виде двух задач посвященных расчетам параметров двигателей с регулируемой частотой вращения, данные для решения заданы в таблицах 1,2. Номер варианта соответствует двум последним цифрам зачётной книжки, если этот номер больше 30, то необходимо отнять от данного номера 30, или число кратное тридцати, чтобы получить номер варианта. Например: две последние цифры зачетной книжки - 76, тогда 76-2×30=16, следовательно – вариант 16. Решение задач осуществлять в соответствии с методикой, приведенной после заданий.
Задача 1.Посвящена расчету параметров двигателя в двигательном режиме и угла управления в рекуперативном режиме. Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 1). Номинальные данные двигателя: мощность Рном; напряжение Uном; угловая скоростьω ; ток якоря Iя.ном ; сопротивление якоря Rя ; постоянная двигателя с Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций. 1. В режиме выпрямления (в двигательном режиме) для угла управления α и номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности. 2. . В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.
Рисунок 1. УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА Тиристорные преобразователи в электромеханических системах Одним из основных видов регулируемых электромеханических систем являются системы с электродвигателями постоянного тока независимого возбуждения (ДПТ НВ). Для питания якорных цепей двигателей и обмоток возбуждения двигателей и генераторов используются полупроводниковые преобразователи напряжения. В большинстве современных преобразователей используются тиристоры. Тиристорные преобразователи (ТП) напряжения переменного тока в постоянный имеют высокий КПД, малую инерционность, высокий коэффициент усиления по мощности и высокую надежность, обеспечиваемую быстродействующей защитой и блочным исполнением системы управления. Применение ТП для регулирования напряжения на якоре двигателя постоянного тока позволяет на 5... 7 % повысить КПД электропривода по сравнению с системой генератор—двигатель. Тиристорные преобразователи не содержат вращающихся частей, имеют меньшую массу, чем электромашинные преобразователи напряжения, и не требуют для своей установки дорогостоящих фундаментов. Основные недостатки ТП: низкий коэффициент мощности при глубоком регулировании выпрямленного напряжения и значительное влияние мощных преобразователей на амплитуду и форму напряжений питающей сети. Кроме того, ТП обладают меньшей помехоустойчивостью и повышенным уровнем излучаемых радиопомех по сравнению с электромашинными преобразователями. Неблагоприятное влияние на коэффициент мощности ТП оказывают высшие гармонические составляющие в кривой тока, потребляемого преобразователем из сети. Однако основная причина низкого значения коэффициента мощности ТП в режимах с глубоким регулированием заключается в сильном возрастании потребляемой преобразователем реактивной мощности при снижении выпрямленного напряжения.
Рисунок 2.
Функциональная схема ТП представлена на рисунке 1. Входной координатой ТП является напряжение управления Uу , выходной – выпрямленная ЭДС, определяемая как среднее на интервале проводимости значение в установившемся режиме Ed и в переходных процессах ed. Входной блок Б1 преобразует напряжение Uy в угол открывания тиристоров а, а выходной блок Б2 преобразует угол а в ЭДС ТП. Технически блок Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 — вентильную группу ВГ. Конструктивно вентильная группа состоит из комплекта тиристоров, предназначенных для определенного направления тока нагрузки. На выходную координату ТП оказывает влияние возмущающее воздействие — ток нагрузки Id, который через функциональный блок нагрузки БН поступает на вход блока Б2. Влияние Idна Edпроявляется только в режиме прерывистых токов. В режиме непрерывных токов ЭДС ТП является функцией только угла открывания. . Основные уравнения и режимы работы двигателей постоянного тока независимого возбуждения
Рисунок 3. На рисунке 3 приведена схема двигателя постоянного тока независимого возбуждения ДПТ НВ при питании от выпрямителя, который может быть управляемым или полууправля-
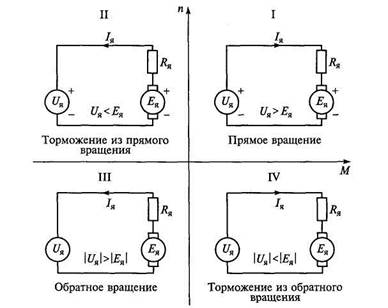
Рисунок 4. Квадранты II и IV соответствуют генераторному режиму работы ДПТ, который предполагает создание усилия на ротор двигателя для управления замедлением приводного механизма. В системе осуществляется обратная передача энергии: двигатель получает механическую энергию от приводного механизма и отдает ее в виде электрической энергии через преобразователь в питающую сеть или другому потребителю. При этом ДПТ работает в генераторном режиме. Для вращения двигателя в прямом направлении (квадрант I) Uя, Еяи /я должны быть положительными; скорость и момент также положительными. При торможении из прямого вращения (квадрант II) двигатель вращается в прямом направлении, при этом ЭДС остается положительной. Для обеспечения отрицательного момента и рекуперации энергии ток якоря должен быть отрицательным. В этом случае питающее напряжение 1/ядолжно поддерживаться меньше, чем ЭДС Ея. При вращении в обратном направлении (квадрант III) Uя, Еяи1я отрицательны. Чтобы момент также был отрицательным, и энергия передавалась бы от источника к двигателю, ЭДС должна удовлетворять условию | 1/яI > | Ея|. Полярность Еядолжна быть изменена на обратную путем изменения полярности тока возбуждения или переключением зажимов обмотки якоря. При торможении из обратного вращения (квадрант IV) Uяи Еяостаются отрицательными. Для создания положительного момента и передачи энергии от двигателя к источнику ток якоря должен быть положительным. В этом случае наведенная ЭДС Еядолжна удовлетворять условию \ UЯ\<\ Ея\. Возможность работы электропривода в одном или нескольких квадрантах определяется выбранным преобразователем. Преобразователи для регулирования скорости ДПТ подразделяются на однофазные и трехфазные. Выбор наиболее подходящей схемы для соответствующего применения преобразователя зависит от числа фаз питающей сети, мощности привода, допустимых пульсаций напряжения, необходимости изменения направления вращения и рекуперации энергии в сеть. Полууправляемый преобразователь обеспечивает работу электропривода лишь на электрических характеристиках, расположенных в одном квадранте, так как направление напряжения и тока на его выходе неизменны. Полностью управляемый преобразователь обеспечивает работу в двух квадрантах, поскольку он дает возможность изменять по направлению напряжение на якоре двигателя, однако однонаправленная проводимость тиристоров не позволяет изменить направление тока через якорь двигателя. Преобразователи с двумя комплектами тиристоров позволяют регулировать скорость двигателя во всех четырех квадрантах. Двухкомплектные схемы с полууправляемыми мостами обеспечивают работу электропривода в двух квадрантах.
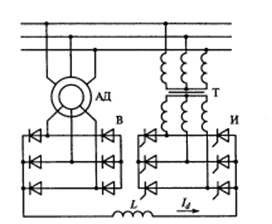
Задача 2Посвящена расчету параметров асинхронного двигателя при инвертировании. Трехфазный асинхронный двигатель с фазным ротором напряжением Uл ; частотой 50 Гц; включен по схеме вентильного каскада (рисунок 5). имеет следующие номинальные параметры схемы замещения (рисунок 6): r, r/, x1, x2/,x12.Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1; Индуктивность L велика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающемуn2; Момент нагрузки Мпри n.Рассчитать для случая когда двигатель работает при частоте вращения n1; ток в индуктивности Id ; напряжение постоянного тока Ed ; угол опережения инвертора β ; КПД η .Скорость вращения магнитного поля ω0. Потерями пренебречь.
Рисунок 5 Рисунок 6 Регулировка скорости вращения асинхронных двигателей Скорость асинхронного двигателя можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна стандартной частоте сети 50 Гц. Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания. Трехфазная схема ТРН для регулирования напряжения на статоре АД, построенная на основе однофазных схем ТРН представлена на рис. 7, а. Она состоит из шести тиристоров VS1... VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Uaот системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления а в функции внешнего сигнала UуИзменяя угол управления а от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1до нуля.
Рисунок 7. ТАБЛИЦА 1
Продолжение ТАБЛИЦЫ 1
ТАБЛИЦА 2
Продолжение ТАБЛИЦЫ 2
Пример решения задачи 1. Регулирование скорости двигателя постоянного тока независимого возбуждения производится по схеме (рисунок 8). Номинальные данные двигателя: мощность Рном= 7,5 кВт; напряжение Uном = 230 В; угловая скоростьω= 126 рад/c ; ток якоря Iя.ном = 38А; сопротивление якоря Rя=0,3Ом ; постоянная двигателя с Индуктивность якорной цепи предполагается достаточной для обеспечения непрерывности тока якоря и отсутствия пульсаций. 1. В режиме выпрямления (в двигательном режиме) для угла управления α и номинального тока якоря необходимо рассчитать: момент и скорость двигателя и коэффициент мощности. 2. В режиме инвертирования (рекуперативного торможения) полярность ЭДС двигателя изменяется на противоположную, например путем реверса потока возбуждения. Для этого режима требуется найти угол управления α, при котором в якорной цепи протекает номинальный ток, а также мощность, возвращаемую в питающую сеть.
Рисунок 8 Решение 1. Режим выпрямления (двигательный режим). Определяем момент двигателя: М=с∙Ф∙Iя=1,74∙38=66,1 Н∙м Напряжение на якоре определяется по формуле:
Пример решения задачи 2 Трехфазный асинхронный двигатель с фазным ротором напряжением Uл =380В; частотой 50 Гц; включен по схеме вентильного каскада (рисунок 9). имеет следующие номинальные параметры схемы замещения (рисунок 10): r=0,041 Ом, r/= 0,044 Ом, x1=0,29 Ом, x2/=0,44 Ом,x12=6,,1 Ом.Отношение чисел витков фаз обмоток ротора к статорным К= w2/w1=0,9; Индуктивность L велика, поэтому выпрямленный ток имеет пренебрежительно малые пульсации. Отношение переменного напряжения преобразователя к питающемуn2=0,4; Момент нагрузки М=750 Н∙мпри n= 910 мин-1.Рассчитать для случая когда двигатель работает при частоте вращения n1=850 мин-1; ток в индуктивности Id ; напряжение постоянного тока Ed ; угол опережения инвертора β ; КПД η .Скорость вращения магнитного поля ω0. Потерями пренебречь.
Рисунок 9 Рисунок 10
Без учета параметров двигателя выпрямленный ток равен:
Определяем выпрямленное напряжение, которое для инвертора имеет обратный знак:
Входное напряжение переменного тока инвертора:
Так как при ХХ
откуда Скорость определяется следующими независимостями:
95,24-104,66=
Угол опережения при этом: Выходная мощность:
Действующее значение тока ротора, приведенное к числу витков статора:
Электрические потери в статоре
Суммарная мощность:
Коэффициент полезного действия, %:
©2015- 2018 megalektsii.ru Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. |
megalektsii.ru
 Ф; угол управления α; напряжение питания Uп;
Ф; угол управления α; напряжение питания Uп;











 .
. .
. .
. , то:
, то: ,
, .
. ;
; ;
;

 .
. .
.
 и ротора
и ротора  :
: