





 После первого запуска стало понятно, что хотели получить одно, а получили другое, после того как транзистор закрывался, двигатель продолжал вращаться ещё не один оборот, оно и понятно, для того чтобы вал остановился, энергия, которую он накопил пока вращался, должна быть израсходована.
После первого запуска стало понятно, что хотели получить одно, а получили другое, после того как транзистор закрывался, двигатель продолжал вращаться ещё не один оборот, оно и понятно, для того чтобы вал остановился, энергия, которую он накопил пока вращался, должна быть израсходована.Вот мы и подошли к одному из основных преимуществ шагового двигателя — возможность точного позиционирования.
Шаговые двигатели бывают трёх основных типов:
 В двигателе с постоянными магнитами, ротор разделён на полюса. При подаче тока в одну из обмоток ротор займёт положение, в котором разноимённые полюса ротора и статора будут находиться напротив друг друга.
В двигателе с постоянными магнитами, ротор разделён на полюса. При подаче тока в одну из обмоток ротор займёт положение, в котором разноимённые полюса ротора и статора будут находиться напротив друг друга. Гибридные двигатели обладают преимуществами вышеописанных двигателей и лучшими характеристиками: меньшей величиной шага, большим моментом, большей скоростью и как следствие стоят дороже.
Гибридные двигатели обладают преимуществами вышеописанных двигателей и лучшими характеристиками: меньшей величиной шага, большим моментом, большей скоростью и как следствие стоят дороже.Перейдём к практике, для эксперимента возьмём шаговый двигатель MITSUMI M42SP-5 с шагом 7.5°, изображённый на картинке.
 Скачиваем на него даташит и находим таблицу.
Скачиваем на него даташит и находим таблицу. Из таблицы понятно, что такие двигатели бывают двух типов:
Из таблицы понятно, что такие двигатели бывают двух типов:Схема двигателя изображена на картинке ниже.
 Из двигателя выходит 5 проводов: 4 фазы и один общий. Общий провод можно найти с помощью мультиметра, сопротивление между ним и оставшимися 4 проводами равно сопротивлению фазы, в нашем случае 50 Ом.
Из двигателя выходит 5 проводов: 4 фазы и один общий. Общий провод можно найти с помощью мультиметра, сопротивление между ним и оставшимися 4 проводами равно сопротивлению фазы, в нашем случае 50 Ом.Как писалось выше, необходим посредник, который примет от микроконтроллера 20mA и отдаст двигателю 259mA. Можно как раньше взять полевой транзистор, но есть одно, но фаз здесь целых четыре штуки и для этого случая есть более простое решение — это использовать микросхему ULN2003.
 ULN2003 состоит из 7 транзисторов Дарлингтона, каждый из которых может пропустить через себя до 500mA, а рабочее напряжение не должно превышать 50V, чего нам вполне достаточно. На самом деле каждая ячейка ULN2003 состоит не только из транзистора Дарлингтона, а также включает в себя весь необходимый обвес, её структуру можно посмотреть в даташите.
ULN2003 состоит из 7 транзисторов Дарлингтона, каждый из которых может пропустить через себя до 500mA, а рабочее напряжение не должно превышать 50V, чего нам вполне достаточно. На самом деле каждая ячейка ULN2003 состоит не только из транзистора Дарлингтона, а также включает в себя весь необходимый обвес, её структуру можно посмотреть в даташите. Транзистор Дарлингтона или пара Дарлингтона, представляет собой два соединённых транзистора, его отличительной особенностью является высокий коэффициент усиления, который равен произведению коэффициентов усиления каждого из транзисторов(βс = β1 ∙ β2).
Транзистор Дарлингтона или пара Дарлингтона, представляет собой два соединённых транзистора, его отличительной особенностью является высокий коэффициент усиления, который равен произведению коэффициентов усиления каждого из транзисторов(βс = β1 ∙ β2).Вращать двигатель можно, подавая питание по очереди на обмотки, при этом в любой момент времени включена лишь одна обмотка, в этом случае двигатель будет работать в режиме шага, то есть при одном переключении обмоток будет поворачиваться на 7.5°.
 Аналогичным образом можно включать две соседние обмотки, этот способ позволяет увеличить момент удержания, при этом двигатель будет работать в режиме шага.
Аналогичным образом можно включать две соседние обмотки, этот способ позволяет увеличить момент удержания, при этом двигатель будет работать в режиме шага. Также можно включить двигатель в режиме полушага, то есть при одном переключении обмоток ротор будет поворачиваться на 3.75°.
Также можно включить двигатель в режиме полушага, то есть при одном переключении обмоток ротор будет поворачиваться на 3.75°. Для удобства управления можно создать массив в котором номер элемента массива будет обозначать номер шага, а значение элемента массива — какие обмотки должны быть включены.
Для удобства управления можно создать массив в котором номер элемента массива будет обозначать номер шага, а значение элемента массива — какие обмотки должны быть включены.uint8_t step[8] = {0x01, 0x03 ,0x02, 0x06,0x04, 0x0c,0x08,0x09};
Если передавать последовательно элементы этого массива в порт микроконтроллера, двигатель будет работать в режиме полушага, если через один — в режиме полного шага. Для передачи значений в порт удобно использовать прерывание от таймера по переполнению, таким образом, изменяя время между прерываниями, мы можем регулировать скорость вращения двигателя.
hubstub.ru
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателейЕсли не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
Где взять шаговый двигатель.Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателемЯ разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N. |
Документация по микросхемам:
easyelectronics.ru
В современном мире всё большую роль играет автоматизация процессов. Для этого необходимо преобразовывать сигналы управления в механические движения. Одним из способов достижения данной цели является использование шаговых двигателей.
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Преимущества применения шаговых двигателей
Недостатки применения шаговых двигателей
Применение шаговых двигателей:
Принцип работы шагового двигателя
Основной принцип работы шагового двигателя заключается в следующем — двухполюсный ротор электродвигателя, сделанный из специальной магнитомягкой стали, располагается в четырехполюсном статоре. Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Как только осуществляется подача напряжения (постоянного) на обмотку управления шаговым электродвигателем, появляется магнитный поток, что больший магнитного потока имеющихся постоянных магнитов. Под воздействием усилия (электромагнитного) ротор начинает менять угол, стараясь войти в положение соосное с полюсами обмотки управления. Последующий импульс управления полностью отключает электрическое напряжение с обмотки управления. Вследствие этого ротор движка движется под воздействием магнитного потока магнитов.
В данной работе описывается алгоритм управления шаговыми двигателями двухфазного (биполярного) и четырёхфазного (униполярного) типа с помощью модуля управления шаговым двигателем с интерфейсом CAN ZET 7160-S StepMotor-CAN или интерфейсом RS-485 ZET 7060-S StepMotor-485.
Биполярный (двухфазный) шаговый двигатель
Двухфазный шаговый двигатель (биполярный шаговый двигатель) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
 Рис. 1 Внутренняя схема биполярного Ш.Д. Рис. 1 Внутренняя схема биполярного Ш.Д. |  Рис. 2 Схема выводов биполярного Ш.Д. Рис. 2 Схема выводов биполярного Ш.Д. |  Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S |
Униполярный (четырёхфазный) шаговый двигатель
Четырёхфазный шаговый двигатель (униполярный шаговый двигатель) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
 Рис. 4 Внутренняя схема униполярного Ш.Д. Рис. 4 Внутренняя схема униполярного Ш.Д. |  Рис. 5 Схема выводов униполярного Ш.Д. Рис. 5 Схема выводов униполярного Ш.Д. |  Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S |
Режимы работы шагового двигателя
Существует несколько способов управления фазами шагового двигателя. Наиболее распространёнными из них являются полношаговый и полушаговый режим. Существуют также режимы управления с 1/4, 1/8, 1/16 шага. Но эти режимы нужны только для узкого круга задач, и они требуют значительного усложнения схемы микроконтроллера и алгоритма управления. Ниже приводится последовательность генерируемых импульсов для различных режимов работы шагового двигателя, на примере униполярного двигателя.
 Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
 Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
 Рис. 9 Полушаговый режим
Рис. 9 Полушаговый режим
Разгон и торможение шагового двигателя
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 10а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 10б).
 Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Таким образом, для работы с шаговым двигателем на большой скорости необходимо выполнять его разгон и замедление, в противном случае произойдёт потеря синхронности между шаговым двигателем и контроллером, и положение ротора шагового двигателя будет утеряно.
Управление шаговым двигателем с помощью модуля ZET7X60-S StepMotor
Перед началом работы с шаговым двигателем необходимо выставить необходимые параметеры на вкладке «Настройки»:
После этого с помощью вкладки «Управление» можно начинать управление шаговым двигателем.
 Рис. 11 Вкладка «Настройки» в программе MODBUS-ZELAB Рис. 11 Вкладка «Настройки» в программе MODBUS-ZELAB |  Рис. 12 Вкладка «Управление» в программе MODBUS-ZELAB Рис. 12 Вкладка «Управление» в программе MODBUS-ZELAB |
Во время выполнения команды, контроллер сообщает о количестве проделанных шагов на данный момент с частотой заданной в настройках (Настройки —> Частота опроса).
 Рис. 13 Отображение количества проделанных шагов в программе ZELAB «Многоканальный осциллограф»
Рис. 13 Отображение количества проделанных шагов в программе ZELAB «Многоканальный осциллограф»
Система управления шаговым двигателем с обратной связью
Система управления шаговым двигателем с обратной связью строится на базе модуля управления шаговым двигателем ZET 7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) и интеллектуального энкодера ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Для подключения к системе ZELAB используется преобразователь интерфейса ZET 7070. Управление шаговым двигателем осуществляется подачей сигналов с модуля ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN). Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения ZELAB.
 Схема системы управления шаговым двигателем с обратной связью
Схема системы управления шаговым двигателем с обратной связью
Состав системы управления шаговым двигателем с обратной связью
| Описание |
| Управляющий модуль ZET 7060-S StepMotor-485 или ZET 7160-S StepMotor-CANЦифровой модуль управления шаговым двигателем с интерфейсом RS-485 или CAN. |
| Датчик углового перемещенияПреобразование углового перемещения в последовательность электрических сигналов, содержащих информацию о величине и направлении этого перемещения. Диаметр корпуса 50 мм. Разрешающая способность до 320000 дискрет на оборот. |
| Измерительный модуль ZET 7060-E Encoder-485 или ZET 7160-E Encoder-CANПреобразование сигнала с датчика в значения углового перемещения и передача этих данных по протоколу Modbus по интерфейсу RS-485 или CAN 2.0. |
| ZET 7070 RS-485↔USB или ZET 7174 CAN-USBМодуль передачи данных с измерительных модулей на ПК |
| MODBUS OPC СерверПрограмма «Сервер данных интеллектуальных датчиков» |
| Кабели для подключения измерительных и управляющих модулей к ZET 7070 или ZET 7174 |
| Программное обеспечение ZELABПрограммы для отображения результатов измерений интеллектуальных датчиков в численном и графическом виде на плоскости и в объеме. |
| SCADA ZETVIEWГрафическая среда разработки приложений для автоматизации измерений |
zetlab.com
Читать все новости ➔
В статье рассматриваются практические решения для управления униполярными шаговыми двигателями. Рассматриваемые решения могут быть легко использованы на практике для различных приложений. В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
В настоящей статье даются рекомендации по проектированию электроприводов униполярными шаговыми двигателями и предлагаются несложные практические решения. По собственному опыту автора статьи, освоение шаговых двигателей легче, проще и значительно дешевле начинать именно с униполярных шаговых двигателей.
Напомню, что основное свойство шагового двигателя в отличие от других типов электродвигателей как переменного, так и постоянного тока является то, что сдвиг его ротора осуществляется на заданный его конструкцией шаг (чаще это угол, реже - линейное смещение) при подаче на его обмотки импульсов напряжения. В этом он похож на шаговое реле, известное еще с XIX века. Его нельзя путать и с многофазными двигателями. Формально шаговые двигатели относятся к двигателям постоянного тока, но они не имеют коллектора (поэтому надежность их выше и помех от них значительно меньше). Для создания момента вращения в этих двигателях, в отличие от коллекторных двигателей постоянного тока, требуется внешнее импульсное управление обмотками, которые расположены не на роторе (который представляет собой постоянный магнит), а на статоре. Другими словами, если вы подадите на обмотку такого двигателя постоянное напряжения, то вращения ротора не будет. Нужно специальное устройство управления - коммутатор. В этом они проигрывают традиционным коллекторным двигателям постоянного тока. Но зато они выигрывают в большем моменте на малых и сверхмалых скоростях вращения, поэтому во многих применениях им не нужен редуктор. Кроме того, они обеспечивают без специальных конструктивных или схемных ухищрений точное позиционирование ротора и торможение, так как обладают не только моментом вращения, но и моментом удержания, который по величине выше момента вращения.
Имеются шаговые двигатели не только традиционного исполнения с вращающимся ротором, но и с его линейным перемещением. В последнем случае на один управляющий импульс происходит линейное смещение ротора на строго заданную конструкцией двигателя величину (подробности см. в [1]). Еще одно важное замечание: шаговый двигатель, в отличие от коллекторного, при стопорении ротора не увеличивает потребление энергии.
Конструкция двигателя
Шаговые двигатели различаются, как по конструктивному исполнению, так и по конфигурации соединения их обмоток. Исполнение двигателей в части обмоток может быть биполярное и униполярное. Основное преимущество униполярных шаговых двигателей заключается в простоте их систем управления, но они имеют меньший момент вращения [1]. На рис.1,а показано «классическое» исполнение включения обмоток, а на рис.1,б - универсальное с расщепленными обмотками, которое позволяет включать двигатель, как в униполярном, так и в биполярном вариантах. Кроме того, в «классическом исполнении» в некоторых типах двигателей средние выводы обмоток (выводы АВ, CD на рис.1,а) могут быть конструктивно объединены внутри самого двигателя (такой вариант как раз показан на фото в начале статьи). Так что если вам попался в руки неизвестный шаговый двигатель, то по количеству выводов вы относительно легко сможете его идентифицировать. Двигатели с шестью и пятью выводами будут гарантировано униполярными. Остается только оп разделить фазировку обмоток. К сожалению, это можно будет сделать только экспериментально. Какой-либо стандартизации по цвету проводов пока нет.
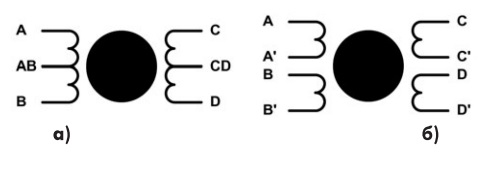
Рис. 1
Конфигурация обмоток униполярных шаговых двигателей и двигателей с расщепленными обмотками в униполярном включении позволяет обойтись без сложных драйверов и дорогостоящих ИМС. Кроме того, классические униполярные двигатели дешевле, так как, в основном, этот тип включения обмоток характерен для двигателей на постоянных магнитах с шагом 18° или 7,5°. Дробление такого большого шага осуществляется, как правило, дополнительным редуктором, который может быть конструктивно совмещен с двигателем [2].
Схема управления униполярного шагового двигателя с универсальным коммутатором
Практическое решение для управления униполярным шаговым двигателем потребовалось автору при использовании двигателя серии P542-M48 [2], а именно униполярного шагового двигателя P542-M482U с встроенным редуктором G23 (125:1). Поскольку двигатель униполярный, то схема его управления, как было указано выше, не содержит ни дорогих ИМС, ни специальных сложных драйверов, достаточно обычных ключей. Коммутатор включения обмоток выполнен на базе технического решения, опубликованного в [3]. Пример практической схемы управления, разработанной автором статьи, которая годится для самых различных применений, показан на рис.2.
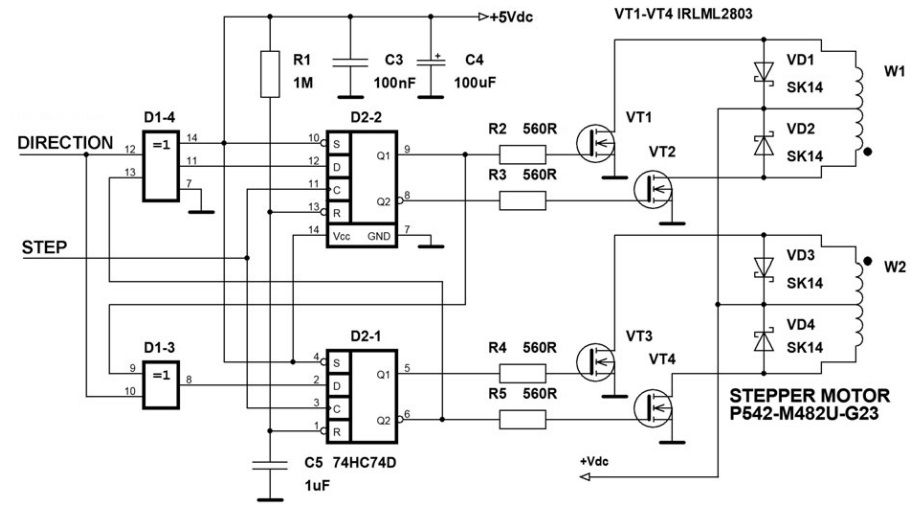
Рис. 2
Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «STEP» («Шаг»), необходимое направление вращения устанавливается через вход «DIRECTION» («Направление вращения»). Оба эти сигнала имеют логические уровни, и если для их формирования используются выходы с открытым коллектором, то требуются соответствующие резисторы подтяжки (на схеме рис.2 они не показаны). Временная диаграмма работы коммутатора (рис2) показана на рис.3, где верхние две трассы - Q1 D2-2, 02 D2-2; нижние две трассы - Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз.
Как можно видеть, здесь реализован полношаговый режим управления (подробно см. [1]) с перекрытием фаз, то есть один импульс сдвигает ротор двигателя на один шаг, но в некоторый момент (половина длительности импульса) фазы накладываются друг на друга (рис.3).
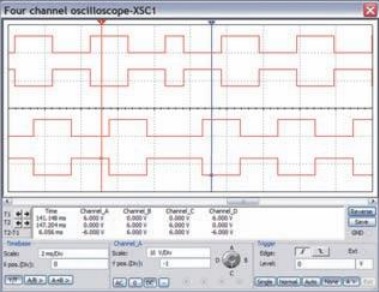
Рис. 3
Схема управления шаговым двигателем без реверса
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (рис.4), при этом частота вращения остается неизменной, а диаграмма управления остается аналогичной той, которая показана на рис.3 (трассы до переключения очередности фаз), но уже без возможности изменения направления вращения двигателя.
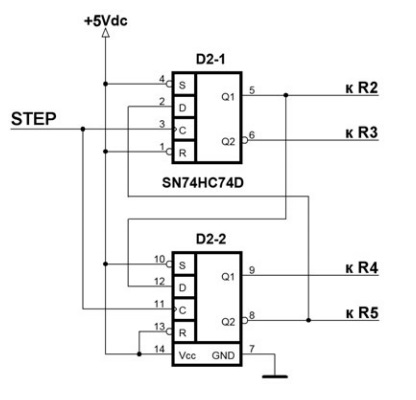
Рис. 4
Схема управления с режимами удержания и выключения
Управление моментом вращения устанавливается изменением тока в обмотках двигателя от регулируемого источника напряжения положительной полярности (автором использовался импульсный понижающий стабилизатор, выполненный по типовой схеме на стандартной ИМС с опцией внешнего включения). Расчет такого DC/DC-преобразователя можно легко выполнить в интерактивном режиме [4], хотя за время, прошедшее со времени публикации, в этот on-line калькулятор высокого уровня и были внесены некоторые изменения, но основа осталась та же. Полное отключение двигателя без удержания ротора осуществляется снятием питающего напряжения с обмоток. Это легко выполнить через вход выключения преобразователя, задав в [4] при выборе ИМС соответствующую опцию. В авторском варианте использовалась ИМС LM2675M-ADJ [5]. Остановка с фиксацией ротора, режим удержания, осуществляется прекращением подачи напряжения с частотой коммутации (вход «STEP»), одновременно желательно уменьшить величину питающего обмотки напряжения Vdc по крайней мере вдвое. С этой точки зрения выбор преобразователя с возможностью регулировки выходного напряжения на ИМС, подобной LM2675M-ADJ, является оптимальным. Пример авторского варианта схемы для формирования напряжения питания обмоток шагового двигателя показан на рис.5. Такая схема пригодна для запитки шаговых двигателей любого типа.
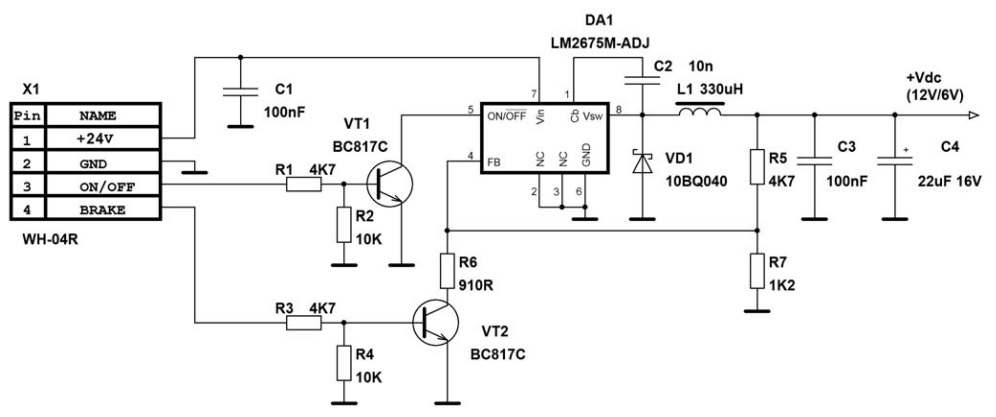
Рис. 5
Схема (рис.5) обеспечивает подачу двух стабильных напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания (формулы, необходимые для расчета выходного напряжения, приведены в [5]). Рабочий режим включается подачей высокого логического уровня на контакт BRAKE (торможение) разъема Х1. Допустимость снижения напряжения питания определяется тем, что момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя момент удержания с редуктором (25:6) равен 19,8 Н*см, а момент вращения всего 6 Н*см. Но при увеличении отношения эта зависимость нивелируется и для двигателей с редукторами с отношением 80 и выше практически не отличаются. Основное преимущество этого метода в том, что он позволяет уменьшить общее потребление тока. В нашем случае с 460 мА до 230 мА, то есть в 2 раза, а мощность в 4 раза, то есть с 5,52 Вт до 1,38 Вт.
Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт ON/OFF разъема X1. Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах на транзисторах VT1, VT2 нет необходимости, выходы схемы управления можно подключить непосредственно вместо упомянутых ключей.
Примечание. В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автором использовалась катушка SDR1006-331К (Bourns). Общее питание формирователя напряжения для обмоток двигателя в рассмотренных режимах может быть уменьшено до 16...18 В, что не окажет никакого влияния на его функционирование. Еще раз обращаю внимание, что при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть лучше закладывать номинальный ток схемы питания, равный удвоенному номинальному току обмоток.
Согласно спецификации [2] оптимальным для двигателей серии P542-M48 является шаг с частотой f=(300...500) Гц. Это и будет определять частоту вращения вала, но частота вращения зависит еще и от конструкции самого двигателя. В нашем случае, без учета редуктора, частота вращения составит:
f*7,5°/360°=(6,25-10,5) об/с,
где 7,5° - это угол поворота ротора двигателя на один шаг управления.
Этот угол как раз и задан конструктивно в самом двигателе. Дальнейшее понижение частоты вращения зависит уже от редуктора.
Изменение частоты вращения двигателя
Частота коммутации обмоток вполне может быть увеличена до 1,5 кГц. Для этого с целью компенсации уменьшения момента вращения неизбежного с ростом частоты применяются специальные методы запитки обмоток двигателя. Если внимательно читать спецификацию [2], то можно заметить, что момент вращения двигателя (сноска «Standard Versions») задан для двух условий, а именно: для условия обозначенного как L/R и условия, которое обозначено как L/4R. Можно заметить, что во втором случае частота вращения ротора шагового двигателя, при котором обеспечивается указанный в спецификации момент, заметно выше, а именно 550 Гц вместо 300 Гц. Что это за условия?
Проблема обеспечения момента вращения для шагового двигателя заключается в том, что для них не требуется подача напряжения, а требуется обеспечение тока в обмотках. Именно этот ток создает магнитное поле статора, взаимодействующее с постоянным магнитным полем ротора. Момент на роторе двигателя как раз и определяется взаимодействием этих магнитных полей.
Как известно, ток в индуктивности не может изменяться скачком, а растет по экспоненте до значения
lmax=Vdc/R;
l(t)=lmax*(1-e-t/t).
Требуемое для этого время определяется постоянной времени цепи:
t=L/R,
где:
L - индуктивность обмотки двигателя;
R - общее сопротивление в цепи обмотки.
Это сопротивление может быть как собственным активным сопротивлением обмотки двигателя RL, так и его суммой с некоторым добавочным резистором. Как видно из при веденной формулы, скорость изменения тока в обмотке обратно пропорциональна ее индуктивности и прямо пропорционально сопротивлению. Чем быстрее ток достигнет своего максимального уровня
lmax=Vdc/RL,
где Vdc - это номинальное напряжение запитки обмотки, a Rl - активное сопротивление в цепи обмотки, тем скорее установится заданный момент на роторе. Это и определяет скорость вращения вала шагового двигателя в зависимости от частоты коммутации. Таким образом, наша цель установить (насколько это возможно быстро) ток в обмотке на уровне Vcd/RL.
Импульсное питание двигателя
Просто увеличить напряжение на двигателе выше номинального крайне не желательно, даже если вы уверенны в том, что ток в обмотках при выбранной скорости вращения ротора не превысит допустимый. Остановка двигателя при такой подаче питания может привести к его выходу из строя. Уменьшить время установки номинального тока в обмотке можно, увеличив напряжение Vcd лишь на некоторое время, которое в несколько раз меньше длительности импульса управления, но это потребует дополнительных ключей, поэтому этот способ используется крайне редко. Самым простым методом оказывается включение последовательно с обмоткой двигателя дополнительного сопротивления с одновременным кратным увеличение напряжения питания Vcd. Это и ускорит накопление тока в индуктивности и не приведет к выходу двигателя из строя, так как требование по максимальному току обмотки не будет нарушено. Вот как раз на этот режим и «намекает» спецификация [2].
В классической теории используется режим L/5R, но для рассматриваемого типа двигателя спецификация рекомендует режим L/4R. Обращаю внимание, что здесь имеется в виду общее сопротивление, то есть сумма собственного сопротивления обмотки R1 и добавочного резистора номиналом 3RL. Ограничение на использование этого метода накладывает высокая рассеиваемая мощность на добавочных резисторах. В рассматриваемом случае при повышении напряжения питания до 4Vcd на добавочных резисторах при малых скоростях вращения, особенно при остановке двигателя, будет рассеиваться мощность:
PR=(3Vcd)2/3RL=(3*12)2/(3*52,4)=8,24 Вт.
Фактически, с учетом допустимого коэффициента нагрузки придется использовать добавочный резистор номиналом в 160 Ом с рассеиваемой мощностью 10 Вт. Как видим, эффективность такого решения крайне низкая. Как выход из положения - использование импульсных стабилизаторов с ограничением максимального тока.
В данном случае для управления биполярным двигателем был применен драйвер с встроенной функцией нарезки, так называемый, чоппинг (от английского термина «chopping» - нарезка). В чем суть этого метода? На двигатель от импульсного преобразователя подается повышенное в несколько раз напряжение, которое формирует ускоренный процесс установления максимального тока обмоток, после достижения заданной величины тока, преобразователь переходит из режима стабилизации напряжения в режим стабилизации тока и удерживает ток обмотки на заданном уровне. Это решение нельзя назвать дешевым, но его КПД несравненно выше. Сравнение методов управления током в обмотках двигателя показано на рис.6.
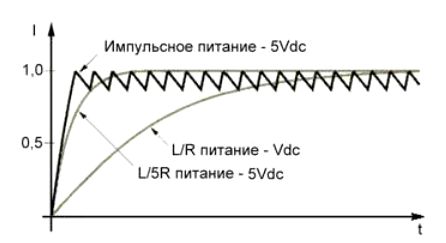
Рис. 6
Еще одним важным моментом является правильный выбор диодов, шунтирующих обмотку двигателя (VD1-VD4, рис.2). Назначение этих диодов - гасить э.д.с. самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом.
Естественно, что и выбор транзистора для ключей управления обмотками должен осуществляться с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое подключение выходных MOSFET-транзисторов к ИМС коммутатора может быть недопустимым. В этом случае необходимо предусмотреть соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с малым током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I=230 мА ток управления по базе ключа должен составить по крайней мере не менее 15 мА (хотя для нормальной работы ключа нужен ток базы 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем типа 74HC74 недостижим, поэтому потребуются дополнительные драйверы для выходных ключей.
Таким образом, самым оптимальным для управления коммутацией обмоток является использования подходящих по току и сопротивлению канала в открытом состоянии Rdc(on) полевых транзисторов с изолированным затвором (MOSFET) с учетом рекомендаций, описанных выше. В авторском варианте использовали транзисторы IRLML2803 с Rdc(on)=0,25 Ом, допустимой мощность рассеивания 540 мВ и постоянным током стока 0,93 А при температуре 70°С. Мощность, рассеиваемая на ключах, выполненных на транзисторах IRLML280, при полной остановке ротора не превысит:
PVT<Rdc(on)*I2=0,25*(0,230)2=13,2 мВт.
В большинстве случаев такой оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их полного расчета можно воспользоваться методикой, приведенной, например, в [6].
В завершение еще раз небольшое напоминание. Когда речь идет о частоте вращения ротора шагового двигателя, то имеется ввиду именно вращение ротора самого двигателя без редуктора. При этом необходимо учитывать угол поворота его ротора на один шаг. Для рассматриваемого типа двигателя он составляет 7,5°. Имеются шаговые двигатели с углом поворота на один шаг от 18° до 0,9° (чаше 1,8°). Для получения конечного результата необходимо обязательно учитывать этот параметр и коэффициент понижения частоты вращения ротора двигателя соответствующим редуктором. Все необходимые параметры для правильного выбора типа двигателя серии P542-M48 приведены в спецификации [2].
Литература
Автор: Владимир Рентюк, г. Запорожье, Украина
meandr.org
Здравствуйте Юрий Валерьевич! Опишу изменения в схеме > Что меня подвигло к изменению схемы? В исходной схеме управление двигателем производится двумя кнопками каждая, из которых содержит по две группы контактов. Одна группа подаёт высокий логический уровень на вход микросхем, другая подаёт питание на двигатель. В виду того, что некоторые двигатели потребляют значительный ток, группа контактов, управляющая двигателем должна быть достаточно мощной, а, следовательно, и габаритной.

Это конечно не удобно и не желательно в виду снижения надёжности устройства по причине использования механических контактов в сильноточных цепях. Я предлагаю управлять питанием двигателя при помощи мощного полевого транзистора, который в свою очередь управляется теми же кнопками. При замыкании кнопок SB-1 или SB-2 высокий логический уровень через логический элемент ИЛИ образованный диодами VD-6 и VD-7 поступает на затвор полевого транзистора VT-5,открывая его, и тем самым замыкая цепь питания двигателя. Это даёт возможность разделить цепи питания и управления, и использовать для управления миниатюрные слаботочные кнопки например тактовые кнопки и кроме того даёт возможность производить управление от внешнего устройства (например компьютера) подачей соответствующих логических уровней. Естественно через дополнительное устройство согласования. Можно ещё реализовать пошаговое управление, но не буду усложнять. Ведь это ПРОСТОЕ устройство. Диоды можно применить любые, кремниевые, какие влезут. Полевой транзистор следует выбирать исходя из напряжения питания и потребляемого тока применяемого двигателя. Полевых транзисторов сейчас продаётся много различной мощности с напряжениями сток-исток до сотен вольт и с токами стока до десятков ампер. Если применяется низковольтный двигатель, то желательно и транзистор выбирать низковольтный, так как у них меньшее сопротивление сток-исток, что предполагает меньшее падение напряжения и меньший нагрев и потери мощности.

По этой же причине желательно и в качестве VT1-VT5, так же использовать полевики с N-каналом. В этом случае сопротивление резисторов в цепи базы можно уменьшить, это не приведёт к перегрузке логических элементов. В исходной схеме не указан тип применённого стабилизатора, но я думаю, что 12вольт будет как раз. Следует учитывать, что мощные полевики, как правило, начинают интенсивно открываться при напряжении на затворе около 4 вольт и насыщаются при напряжении около 10 вольт. Вот вроде и всё. Изменённая схема и изменённая печатка прилагаются.
Скачать “Управление шаговым двигателем” Uprav_shag_dvig.rar – Загружено 767 раз – 34 KB
Н.А. Гурылёв М.О., г. Шатура. 20.01.2014г.Но можно обойтись и без диодов, если для управления транзистором использовать сигнал разрешения работы генератора. Это вывод 2 микросхемы DD1.1. В качестве полевого транзистора лучше использовать транзисторы, в маркировке которых присутствует буква «L». Например, IR2505L. Такие транзисторы как раз предназначены для работы с логическими микросхемами и совместимы даже с пятивольтовой логикой.
Просмотров:23 620
www.kondratev-v.ru
Это довольно простая схема контроллера шагового двигателя, которая позволит вам точно управлять однополярным шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т.д. Если вы никогда не работали с шаговыми двигателями, то эта статья для вас.
 |
Как работает шаговый двигатель?
Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. В нашем примере двигателю необходимо 48 импульсов чтобы совершить полный оборот в 360 градусов.
 |
Другое преимущество шаговых двигателей - то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
Шаговый двигатель состоит из ротора - постоянного магнита, который вращается внутри, и статор - четыре катушки (север, восток, юг, запад), которые являются частью корпуса и не перемещаются. Ротор совершает вращение посредством последовательных импульсов напряжение постоянного тока подаваемого к одной или двум катушкам одновременно.
Устройство Шагового двигателя.
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер - схема, которая подает напряжение к любой из четырех катушек статора. Устройство может быть построено с использованием интегральной микросхемы типа ULN2003 (отечественный аналог К1109КТ22) состоящая из набора мощных составных ключей с защитными диодами на выходе. Наличие защитных диодов позволяет подключать индуктивные нагрузки без дополнительной защиты от выбросов обратного напряжения.
Подключения шагового двигателя.
 |  |
Однополярный двигатель должен иметь пять или шесть контактов в зависимости от модели. Если двигатель имеет шесть контактов то необходимо соединить выводы 1 и 2 (красный) вместе и подключить их к плюсу 12-24V напряжения питание. Оставшиеся выводы a1 (желтый), b1 (черный), a2 (оранжевый), b2 (коричневый) подключить к контроллеру согласно схеме.
Способы управления.
Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем.
1. Одиночные импульсы - самый простой способ. Одновременно подключается только одна катушка. Необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.
 |
2. Двойной импульс - одновременное подключение двух соседних катушек. В этом случае также необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.
 |
3. Комбинированные импульсы - чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор приблизительно на 3,75 градуса.
 |
Программное обеспечение контроллера шагового двигателя.
Для управления работой шагового двигателя используем компьютер и программу. При использовании компьютера вы будете в состоянии сделать намного больше с вашим шаговым двигателем и наиболее важно - визуализировать, как ток течет через катушки.
В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Программа работает с версией Windows (98/ME/2000/XP).
Скачать программу Вы не можете скачивать файлы с нашего сервера
Источник: https://www.joyta.ru
Обсудить на форумеingeneryi.info
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое биполярный шаговый двигатель, его принцип работы, как сделать и установить устройство своими руками, а также где купить такой генератор с редуктором.
Униполярный или биполярный шаговый привод (двигатель) – это специальный бесщеточный электрический двигатель постоянного тока, который разделяет полный оборот на несколько равных шагов. Для работы этого прибора необходимы специальная деталь: контроллер шагового двигателя.
 Фото — Шаговый двигатель
Фото — Шаговый двигательПоимо магнитных деталей и обмоток, также в нем есть приборная панель (блок управления), сигнализаторы, передатчики.
 Фото — Контроллер шагового двигателя
Фото — Контроллер шагового двигателяВ основном он используется для шлифовального и фрезерного станка, работы различных бытовых устройств, производственных механизмов и транспортных средств.
Видео: шаговые двигатели
Когда напряжение прикладывается к клеммам, специальные щетки двигателя начинают непрерывно вращаться. Шаговый движок холостого хода является уникальным благодаря своему важному свойству: преобразовывать поступающие входные импульсы (обычно прямоугольной направленности) в предварительно определенное положение приложенного ведущего вала.
Каждый импульс перемещает вал под фиксированным углом. Устройства с таким редуктором максимально эффективны, если имеют несколько электромагнитов зубчатого типа, расположенных вокруг центрального зубчато-образного куска железа. Электромагниты возбуждаются от внешней цепи управления, которую чаще всего представляет микроконтроллер. Чтобы сделать поворот вала двигателя, один электромагнит, к которому прикладывается энергия, как бы притягивает к своей поверхности зубья зубчатого колеса. Когда они выровнены по отношению к ведущему электромагниту, они слегка смещаются к следующей магнитной детали.
Первый электромагнит должен выключиться, а следующий включиться, тогда шестеренка будет вращаться, чтобы выровняться с предыдущим колесом, после чего процесс повторяется необходимое количество раз. Именно эти вращения называются постоянным шагом, скорость вращения двигателя определяется при помощи подсчета количества шагов для полного оборота или (оборотов) двигателя.
 Фото — Шаговый двигатель в разборном виде
Фото — Шаговый двигатель в разборном видеСхема управления шаговым двигателем имеет следующий вид:
 Фото — Управление шаговым двигателем
Фото — Управление шаговым двигателем Фото — Схема управления шаговым двигателем
Фото — Схема управления шаговым двигателем Фото — Простая схема
Фото — Простая схемаТакже для контроля работы устройства используется драйвер шагового двигателя. Это необходимо, если Вы будете настраивать мотор для работы станка с ЧПУ, отдельный ветрогенератор или используете его для работы ветряка.
Всего существует четыре основных типа шаговых двигателей:
Привод с постоянным магнитом
Устройства с магнитами применяют магнитную деталь в роторе. Они работают на принципе притяжения или отталкивания ротором и статором электромагнитного мотора. Переменно-шаговый двигатель имеет простой ротор из железа и работает на основе фундаментального принципа, по которому минимально допустимое отталкивание происходит с наименьшим зазором, исходя из этого, точки ротора притягиваются к полюсам магнитного статора. Устройства гибридного типа сочетают в себе оба описанных ранее принципа, это самые дорогие приборы.
 Фото — Гибридный шаговый двигатель
Фото — Гибридный шаговый двигательШаговые двухфазные двигатели
Самым распространенным типом данных механизмов по праву считается шаговый двухфазный мотор. Этот прибор достаточно простой, чтоб его можно было установить без какого-либо опыта, и довольно сложный, чтобы стоить дороже асинхронного движка.
Пошаговый двухфазный самодельный и купленный двигатель может иметь два основных типа обмотки для электромагнитных катушек: биполярную и униполярную.
Униполярные двигатели
Униполярный (однополярный) шаговый двигатель оснащен одной обмоткой с центральным магнитным краном, который влияет на каждую фазу. Каждая секция обмотки включается для того, чтобы обеспечивать определенное направление магнитного поля. Поскольку в такой конструкции магнитный полюс может работать без дополнительного переключения, то направления тока, коммутация цепи осуществляются очень просто (например, для стандартного среднемощного двигателя будет достаточно одного транзистора) для каждой обмотки. Как правило, учитывая фазовые переключения: три провода на фазу и шесть для выходного сигнала являются типичными для двухфазного двигателя.
 Фото — Чертеж двухфазного электродвигателя
Фото — Чертеж двухфазного электродвигателяШаговые двигатели и их микропроцессорные системы управления – это очень интересный раздел электротехнических наук. Микроконтроллер двигателя может быть использован для того, чтобы активировать транзистор в нужной (определенной программой) последовательности.
В свою очередь обмотки могут быть подключены путем прикосновения соединительных проводов вместе с постоянными магнитами двигателя. Если клеммы катушки соединятся, вал будет сложно повернуть. Сопротивление между общим проводом и торцом катушки проволоки всегда равняется половине сопротивления между торцами катушек и торцами проводов. Это потому что общий провод всегда длиннее, чем половина, соединяющая катушки.
Биполярный двигатель
Биполярные двигатели оснащены одной фазовой обмоткой. Ток в неё поступает переломным образом при помощи магнитного полюса, поэтому управляющая схема должна быть сложнее, как правило, с соединяющим мостом. Есть два провода на фазу, но они не являются общими. Смешение сигнала шагового двигателя на более высокой частоте, может снижать эффект трения системы.
 Фото — Шаговый двухфазный двигатель
Фото — Шаговый двухфазный двигательТакже бывает трехфазный двигатель, у него более узкая область деятельности, такой шаговый механизм используется для фрезерных станков с ЧПУ (которые запускаются с компьютера), автомобилей типа Опель Вектра, Ниссан, Рено, ВАЗ и прочих транспортных средств, где необходимо использование дроссельной заслонке. Также для дисковода и принтера Epson используется шаговый мотор ЕМ-234 (EM-234).
Подключение шагового двигателя осуществляется по определенной схеме, в зависимости от того, сколько проводов имеет привод, и как Вы хотите запустить прибор.
Шаговые двигатели могут поставляться с четырьмя, пятью, шестью или восемью проводами. Если двигатель имеет четыре провода, то он может использоваться только с биполярным устройством. Каждая из двух фазных обмоток имеет пару проводов. Используйте метр, чтобы определить пары проводов с непрерывной связью между ними, чтобы подключить драйвер пошагово.
Мощный шести-проводной мотор имеет пару проводов для каждой обмотки и центр-кран для каждой обмотки. Он может быть подключен как к однополярному, так и к биполярному устройству. Используйте измерительный прибор для разделения провода. Для подключения к однополярному устройству можно использовать все шесть проводов. Для биполярного только один конец провода и один центральный кран каждой обмотки.
Пяти-проводной мотор похож на шестипроводной прибор, но центральные клеммы соединены внутри в качестве сплошного кабеля, и выходят к одному проводу. Поэтому отделить обмотки одну от другой практически невозможно без разрывов. Лучшее решение – это определить центр провода и соединять его с прочими проводниками, такой режим не только очень безопасен, но и максимально эффективен. После подключить прибор и проверить его работоспособность.
 Фото — Установка шагового двигателя
Фото — Установка шагового двигателяНоминальное напряжение будет производить первичная обмотка при постоянном токе.
Начальная скорость крутящего момента шагового двигателя будет изменяться прямо пропорционально с током. От схемы привода и индуктивности обмоток зависит, как быстро линейный момент понижается на последующих высоких скоростях. Часто шаговые двигатели приспособлены к суровым условиям труда, они имеют IP65 степень защиты.
Часто сравнивают серводвигатель (сервопривод) и шаровую модель, но последние работают гораздо дольше и являются более продуктивными, им реже нужен ремонт. Но привод может пропустить больше вольт. Поэтому сравнивать эти модели нецелесообразно.
Перед тем, как выбрать прибор, нужно знать характеристики самых популярных шаровых двигателей российского производства:
| Марка двигателя | Шаг, градус | Число фаз | Крутящий момент, Нт |
| ШД-1 | 15 | 4 | 40 |
| ДШ-0,04А | 22,5 | 4 | 100 |
| ДШИ 200 | 1,8 | 4 | 0,25 |
| ДШ-6 | 18 | 4 | 2300 |
Не менее активно используются ДШР-40 (четырехфазные), NEMA 23, SanyoDenkiSM28, FDD (floppy-disk – флоппи диск), SM-200-0.22, SP-57, STH-39D1112, Purelogic R&D с энкодером. Чтобы подобрать нужный электрический двигатель, Вам нужно просчитать нужные параметры мощности, напряжение и крутящего момента. Чтобы определить эти данные, Вам нужно провести расчет.
Самой явной проблемой при работе шагового двигателя является управление шаговым двигателем без контроллера. Чтобы решить эту незадачу Вам нужно использовать специальный блок логической связи, который поможет управлять устройством без микросхемы контроллера. Но мы советуем разрабатывать систему контроля шагового двигателя именно на контроллере: Attiny2313, AVR-USB-MEGA16 (подсоединяется через usb), CNC-1318, HDD, PLCM-LPT, PIC, CD ULN, Arduino (Арудино) UNO, ATmega8, драйвер l293d.
 Фото — Контроллер биполярного шагового двигателя
Фото — Контроллер биполярного шагового двигателяПродажа шагового двигателя осуществляется в России, Украине, Беларуси и прочих странах в любом электротехническом магазине, цена зависит от типа прибора, мощности в кВт и его предназначения.
| Город | Цена на шаговый однополярный двигатель, у.е. |
| Киев | 3500 |
| Москва | 3000 |
| Харьков | 4000 |
| СПб | 3500 |
www.asutpp.ru










