Огневые испытания ПВРД в лаборатории НАСА
Огневые испытания ПВРД в лаборатории НАСА Прямоточный воздушно-реактивный двигатель (ПВРД) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи, истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для вывода его на рабочую мощность необходим тот или иной ускоритель.

В 1913 году француз Рене Лорин[en] получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк[en] получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, Leduc 0.10[en]. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 0.21[en] и Leduc 0.22[en], а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
Рабочий процесс ПВРД кратко можно описать следующим образом. Воздух, поступая со скоростью полёта во входное устройство двигателя, затормаживается (на практике, до скоростей 30—60 м/с, что соответствует числу Маха 0,1—0,2), его кинетическая энергия преобразуется во внутреннюю энергию — его температура и давление повышаются.
В предположении того, что воздух — идеальный газ, и процесс сжатия является изоэнтропийным, степень повышения давления (отношение статического давления в заторможенном потоке к атмосферному) выражается уравнением
ppo=(1+k−12⋅Mn2)kk−1{\displaystyle {\frac {p}{p_{o}}}={\bigg (}1+{\frac {k-1}{2}}\cdot M_{n}^{2}{\bigg )}^{\frac {k}{k-1}}} (5)где
p{\displaystyle p} — давление в полностью заторможенном потоке; po{\displaystyle p_{o}} — атмосферное давление; Mn{\displaystyle M_{n}} — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k} — показатель адиабаты, для воздуха равный 1,4.На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
Сжатый воздух в камере сгорания нагревается за счёт окисления подаваемого в неё топлива, внутренняя энергия рабочего тела при этом возрастает. Затем рабочее тело сначала, сжимаясь в сопле, достигает звуковой скорости, а потом, расширяясь — сверхзвуковой, ускоряется и истекает со скоростью большей, чем скорость встречного потока, что и создаёт реактивную тягу.
 Схема устройства ПВРД на жидком топливе:
Схема устройства ПВРД на жидком топливе: Схема устройства твердотопливного ПВРД
Схема устройства твердотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением
P=dmadt⋅(ve−v)+dmfdt⋅ve{\displaystyle P={\frac {dm_{a}}{dt}}\cdot (v_{e}-v)+{\frac {dm_{f}}{dt}}\cdot v_{e}}Где P{\displaystyle P} — сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
Секундный расход воздуха:
dmadt=ρ⋅dVdt=ρ⋅S⋅dldt=ρ⋅S⋅v{\displaystyle {\frac {dm_{a}}{dt}}=\rho \cdot {\frac {dV}{dt}}=\rho \cdot S\cdot {\frac {dl}{dt}}=\rho \cdot S\cdot v},где
ρ{\displaystyle \rho } — плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S} — площадь сечения входа воздухозаборника, v{\displaystyle v} — скорость полёта.Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью сгорает и полностью используется кислород воздуха в процессе горения:
dmdt=dmadt+dmfdt=dmadt+1L⋅dmadt=dmadt⋅(1+1L){\displaystyle {\frac {dm}{dt}}={\frac {dm_{a}}{dt}}+{\frac {dm_{f}}{dt}}={\frac {dm_{a}}{dt}}+{\frac {1}{L}}\cdot {\frac {dm_{a}}{dt}}={\frac {dm_{a}}{dt}}\cdot (1+{\frac {1}{L}})},где
dmadt{\displaystyle {\frac {dm_{a}}{dt}}} — секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего, L{\displaystyle L} — стехиометрический коэффициент смеси горючего и воздуха.Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в ракетных твердотопливных двигателях. Если для последних большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твердотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 «Москит».
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М = 0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M < 0,5 ПВРД практически неработоспособен. Но и на предельной для дозвукового диапазона скорости, то есть при М → 1, степень повышения давления составляет лишь 1,89, а идеальный термический КПД — лишь 16,7 %, что в 1,5 раза меньше, чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне чисел Маха 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
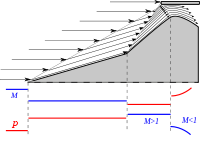
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с осесимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с осесимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух-земля ASMP[en] (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух-земля ASMP[en] (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока (косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока). В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой, и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — так называемое внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим смещать его вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М = 3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически, по формуле (3), достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой
T=To⋅(1+k−12⋅Mn2){\displaystyle T=T_{o}\cdot (1+{\frac {k-1}{2}}\cdot M_{n}^{2})}где Tо</span> — температура окружающего невозмущённого потока. При М = 5 и Tо = 273 K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638 К, при М = 6 — 2238 К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М = 5, считается предельной для СПВРД.
 Экспериментальный гиперзвуковой летательный аппарат X-43 (рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN[en] Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые, и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN[en] Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые, и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — scramjet) называется ПВРД, работающий на скоростях полёта свыше М = 5 (верхний предел точно не устанавливается).
На начало XXI века этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твердотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[1], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < М < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Также ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.
Во второй половине 1950-х годов, в эпоху холодной войны, в США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД. Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 году были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 МВт в течение пяти минут с тягой 156 кН). Лётные испытания не проводились, программа была закрыта в июле 1964 года. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее, ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. То есть, например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скоростей от М = 1, переходит на использование атмосферного воздуха.
В России, по сделанному президентом В. В. Путиным в начале 2018 года заявлению, «состоялся успешный пуск крылатой ракеты с ядерной энергоустановкой».[2]
wikipedia.green

 Огневые испытания ПВРД в лаборатории NASA
Огневые испытания ПВРД в лаборатории NASA Прямоточный воздушно-реактивный двигатель (ПВРД, англоязычный термин — Ramjet) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для выхода его на рабочую мощность необходим тот или иной ускоритель.
 Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946
Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946 В 1913 году француз Рене Лорен получил патент на прямоточный воздушно-реактивный двигатель. ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-е годы с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт аппарата с маршевым ПВРД, Leduc 010. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 021 и Leduc 022, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление ТРД представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга на месте, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а, следовательно, дешевизне и надёжности. Начиная с 50-х годов XX века в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.

В СССР с 1954 по 1960 гг в ОКБ-301 под руководством С.А.Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше 3М, и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть генерального конструктора С. А. Лавочкина в 1960 г окончательно похоронила проект. Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 Оникс, П-270 Москит.
Рабочий процесс ПВРД кратко можно описать следующим образом:
 (5) где
(5) где  — давление в полностью заторможенном потоке;
— давление в полностью заторможенном потоке;  — атмосферное давление;
— атмосферное давление;  — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),  — показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
— показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.  Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.
Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.  Схема устройства твёрдотопливного ПВРД
Схема устройства твёрдотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 (3)
(3)  Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта, может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи, тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением

Где  — сила тяги,
— сила тяги,  — скорость полёта,
— скорость полёта,  — скорость реактивной струи относительно двигателя,
— скорость реактивной струи относительно двигателя,  — секундный расход горючего.
— секундный расход горючего.
Секундный расход воздуха:

Где  — плотность воздуха(зависит от высоты),
— плотность воздуха(зависит от высоты),  -объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
-объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,  — площадь сечения входа воздухозаборника, — скорость полёта.
— площадь сечения входа воздухозаборника, — скорость полёта.
Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью згорает и полностью используется кислород воздуха в процессе горения:

Где  — секундный расход воздуха, — секундный расход горючего,
— секундный расход воздуха, — секундный расход горючего,  — стехиометричнеский коэффициент смеси горючего и воздуха.
— стехиометричнеский коэффициент смеси горючего и воздуха.
Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в РДТТ. Если для ракетного двигателя большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твёрдотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 Москит.
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М=0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M<0,5 ПВРД неработоспособен. Но и на предельной для дозвукового диапазона скорости, при М=1 степень повышения давления составляет 1,89, а идеальный термический КПД — 16,7 %, что в 1,5 раза меньше чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же, и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4-х) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока. (Косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока.) В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — т. н. внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим перемещаться ему вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М=3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически (по формуле (3)) достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой:
 где
где  — температура невозмущённого потока.
— температура невозмущённого потока. При М=5 и Тo=273K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638К, при М=6 — 2238К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М=5 считается предельной для СПВРД
 Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — Scramjet) называется ПВРД, работающий на скоростях полёта свыше 5М, (верхний предел точно не устанавливается).
На начало XXI в. этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твёрдотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[1], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < M < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Так же ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.

Во второй половине 50-х годов ХХ в., в эпоху холодной войны, В США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД. Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 г. были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 мегаватт в течение пяти минут с тягой 156 kN). Лётные испытания не проводились, программа была закрыта в июле 1964 г. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. Т. е., например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скорости от 1М, переходит на использование атмосферного воздуха.
med.academic.ru

 Огневые испытания ПВРД в лаборатории NASA
Огневые испытания ПВРД в лаборатории NASA Прямоточный воздушно-реактивный двигатель (ПВРД, англоязычный термин — Ramjet) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для выхода его на рабочую мощность необходим тот или иной ускоритель.
 Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946
Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946 В 1913 году француз Рене Лорен получил патент на прямоточный воздушно-реактивный двигатель. ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-е годы с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт аппарата с маршевым ПВРД, Leduc 010. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 021 и Leduc 022, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление ТРД представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга на месте, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а, следовательно, дешевизне и надёжности. Начиная с 50-х годов XX века в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.

В СССР с 1954 по 1960 гг в ОКБ-301 под руководством С.А.Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше 3М, и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть генерального конструктора С. А. Лавочкина в 1960 г окончательно похоронила проект. Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 Оникс, П-270 Москит.
Рабочий процесс ПВРД кратко можно описать следующим образом:
 (5) где
(5) где  — давление в полностью заторможенном потоке;
— давление в полностью заторможенном потоке;  — атмосферное давление;
— атмосферное давление;  — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),  — показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
— показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.  Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.
Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.  Схема устройства твёрдотопливного ПВРД
Схема устройства твёрдотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 (3)
(3)  Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта, может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи, тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением

Где  — сила тяги,
— сила тяги,  — скорость полёта,
— скорость полёта,  — скорость реактивной струи относительно двигателя,
— скорость реактивной струи относительно двигателя,  — секундный расход горючего.
— секундный расход горючего.
Секундный расход воздуха:

Где  — плотность воздуха(зависит от высоты),
— плотность воздуха(зависит от высоты),  -объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
-объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,  — площадь сечения входа воздухозаборника, — скорость полёта.
— площадь сечения входа воздухозаборника, — скорость полёта.
Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью згорает и полностью используется кислород воздуха в процессе горения:

Где  — секундный расход воздуха, — секундный расход горючего,
— секундный расход воздуха, — секундный расход горючего,  — стехиометричнеский коэффициент смеси горючего и воздуха.
— стехиометричнеский коэффициент смеси горючего и воздуха.
Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в РДТТ. Если для ракетного двигателя большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твёрдотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 Москит.
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М=0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M<0,5 ПВРД неработоспособен. Но и на предельной для дозвукового диапазона скорости, при М=1 степень повышения давления составляет 1,89, а идеальный термический КПД — 16,7 %, что в 1,5 раза меньше чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же, и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4-х) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока. (Косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока.) В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — т. н. внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим перемещаться ему вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М=3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически (по формуле (3)) достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой:
 где
где  — температура невозмущённого потока.
— температура невозмущённого потока. При М=5 и Тo=273K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638К, при М=6 — 2238К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М=5 считается предельной для СПВРД
 Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — Scramjet) называется ПВРД, работающий на скоростях полёта свыше 5М, (верхний предел точно не устанавливается).
На начало XXI в. этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твёрдотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[1], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < M < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Так же ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.

Во второй половине 50-х годов ХХ в., в эпоху холодной войны, В США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД. Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 г. были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 мегаватт в течение пяти минут с тягой 156 kN). Лётные испытания не проводились, программа была закрыта в июле 1964 г. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. Т. е., например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скорости от 1М, переходит на использование атмосферного воздуха.
dis.academic.ru

 Огневые испытания ПВРД в лаборатории NASA
Огневые испытания ПВРД в лаборатории NASA Прямоточный воздушно-реактивный двигатель (ПВРД, англоязычный термин — Ramjet) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для выхода его на рабочую мощность необходим тот или иной ускоритель.
 Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946
Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946 В 1913 году француз Рене Лорен получил патент на прямоточный воздушно-реактивный двигатель. ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-е годы с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт аппарата с маршевым ПВРД, Leduc 010. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 021 и Leduc 022, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление ТРД представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга на месте, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а, следовательно, дешевизне и надёжности. Начиная с 50-х годов XX века в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.

В СССР с 1954 по 1960 гг в ОКБ-301 под руководством С.А.Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше 3М, и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть генерального конструктора С. А. Лавочкина в 1960 г окончательно похоронила проект. Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 Оникс, П-270 Москит.
Рабочий процесс ПВРД кратко можно описать следующим образом:
 (5) где
(5) где  — давление в полностью заторможенном потоке;
— давление в полностью заторможенном потоке;  — атмосферное давление;
— атмосферное давление;  — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),  — показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
— показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.  Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.
Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.  Схема устройства твёрдотопливного ПВРД
Схема устройства твёрдотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 (3)
(3)  Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта, может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи, тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением

Где  — сила тяги,
— сила тяги,  — скорость полёта,
— скорость полёта,  — скорость реактивной струи относительно двигателя,
— скорость реактивной струи относительно двигателя,  — секундный расход горючего.
— секундный расход горючего.
Секундный расход воздуха:

Где  — плотность воздуха(зависит от высоты),
— плотность воздуха(зависит от высоты),  -объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
-объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,  — площадь сечения входа воздухозаборника, — скорость полёта.
— площадь сечения входа воздухозаборника, — скорость полёта.
Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью згорает и полностью используется кислород воздуха в процессе горения:

Где  — секундный расход воздуха, — секундный расход горючего,
— секундный расход воздуха, — секундный расход горючего,  — стехиометричнеский коэффициент смеси горючего и воздуха.
— стехиометричнеский коэффициент смеси горючего и воздуха.
Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в РДТТ. Если для ракетного двигателя большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твёрдотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 Москит.
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М=0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M<0,5 ПВРД неработоспособен. Но и на предельной для дозвукового диапазона скорости, при М=1 степень повышения давления составляет 1,89, а идеальный термический КПД — 16,7 %, что в 1,5 раза меньше чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же, и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4-х) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока. (Косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока.) В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — т. н. внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим перемещаться ему вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М=3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически (по формуле (3)) достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой:
 где
где  — температура невозмущённого потока.
— температура невозмущённого потока. При М=5 и Тo=273K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638К, при М=6 — 2238К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М=5 считается предельной для СПВРД
 Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — Scramjet) называется ПВРД, работающий на скоростях полёта свыше 5М, (верхний предел точно не устанавливается).
На начало XXI в. этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твёрдотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[1], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < M < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Так же ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.

Во второй половине 50-х годов ХХ в., в эпоху холодной войны, В США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД. Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 г. были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 мегаватт в течение пяти минут с тягой 156 kN). Лётные испытания не проводились, программа была закрыта в июле 1964 г. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. Т. е., например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скорости от 1М, переходит на использование атмосферного воздуха.
brokgauz.academic.ru

 Огневые испытания ПВРД в лаборатории NASA
Огневые испытания ПВРД в лаборатории NASA Прямоточный воздушно-реактивный двигатель (ПВРД, англоязычный термин — Ramjet) — реактивный двигатель, является самым простым в классе воздушно-реактивных двигателей (ВРД) по устройству. Относится к типу ВРД прямой реакции, в которых тяга создается исключительно за счёт реактивной струи истекающей из сопла. Необходимое для работы двигателя повышение давления достигается за счёт торможения встречного потока воздуха. ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости, для выхода его на рабочую мощность необходим тот или иной ускоритель.
 Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946
Leduc 010 - первый аппарат, летавший с ПВРД (Музей в Ле Бурже). Первый полёт — 19 ноября 1946 В 1913 году француз Рене Лорен получил патент на прямоточный воздушно-реактивный двигатель. ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-е годы с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт аппарата с маршевым ПВРД, Leduc 010. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 021 и Leduc 022, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление ТРД представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга на месте, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а, следовательно, дешевизне и надёжности. Начиная с 50-х годов XX века в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.

В СССР с 1954 по 1960 гг в ОКБ-301 под руководством С.А.Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше 3М, и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть генерального конструктора С. А. Лавочкина в 1960 г окончательно похоронила проект. Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 Оникс, П-270 Москит.
Рабочий процесс ПВРД кратко можно описать следующим образом:
 (5) где
(5) где  — давление в полностью заторможенном потоке;
— давление в полностью заторможенном потоке;  — атмосферное давление;
— атмосферное давление;  — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),  — показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
— показатель адиабаты, для воздуха равный 1,4. На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.  Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.
Схема устройства ПВРД на жидком топливе. 1. Встречный поток воздуха; 2. Центральное тело. 3. Входное устройство. 4. Топливная форсунка. 5. Камера сгорания. 6. Сопло. 7. Реактивная струя.  Схема устройства твёрдотопливного ПВРД
Схема устройства твёрдотопливного ПВРД Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
 (3)
(3)  Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания. В общем, зависимость тяги ПВРД от скорости полёта, может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи, тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сила тяги ПВРД определяется выражением

Где  — сила тяги,
— сила тяги,  — скорость полёта,
— скорость полёта,  — скорость реактивной струи относительно двигателя,
— скорость реактивной струи относительно двигателя,  — секундный расход горючего.
— секундный расход горючего.
Секундный расход воздуха:

Где  — плотность воздуха(зависит от высоты),
— плотность воздуха(зависит от высоты),  -объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,
-объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени,  — площадь сечения входа воздухозаборника, — скорость полёта.
— площадь сечения входа воздухозаборника, — скорость полёта.
Можем определить секундный расход массы рабочего тела для идеального случая. когда горючее полностью згорает и полностью используется кислород воздуха в процессе горения:

Где  — секундный расход воздуха, — секундный расход горючего,
— секундный расход воздуха, — секундный расход горючего,  — стехиометричнеский коэффициент смеси горючего и воздуха.
— стехиометричнеский коэффициент смеси горючего и воздуха.
Конструктивно ПВРД имеет предельно простое устройство. Двигатель состоит из камеры сгорания, в которую из диффузора поступает воздух, а из топливных форсунок — горючее. Заканчивается камера сгорания входом в сопло, как правило, суживающееся-расширяющееся.
С развитием технологии смесевого твёрдого топлива, оно стало применяться в ПВРД. Топливная шашка с продольным центральным каналом размещается в камере сгорания. Рабочее тело, проходя по каналу, постепенно окисляет топливо с его поверхности, и нагревается само. Использование твёрдого топлива ещё более упрощает конструкцию ПВРД: ненужной становится топливная система. Состав смесевого топлива для ПВРД отличается от используемого в РДТТ. Если для ракетного двигателя большую часть топлива составляет окислитель, то для ПВРД он добавляется лишь в небольшом количестве для активизации процесса горения. Основную часть наполнителя смесевого топлива ПВРД составляет мелкодисперсный порошок алюминия, магния или бериллия, теплота окисления которых значительно превосходит теплоту сгорания углеводородных горючих. Примером твёрдотопливного ПВРД может служить маршевый двигатель противокорабельной крылатой ракеты П-270 Москит.
В зависимости от скорости полёта ПВРД подразделяются на дозвуковые, сверхзвуковые и гиперзвуковые. Это разделение обусловлено конструктивными особенностями каждой из этих групп.
Дозвуковые ПВРД предназначены для полётов на скоростях с числом Маха от 0,5 до 1. Торможение и сжатие воздуха в этих двигателях происходит в расширяющемся канале входного устройства — диффузоре.
Эти двигатели характеризуются крайне низкой эффективностью. При полёте на скорости М=0,5 степень повышения давления в них (как следует из формулы 2) равна 1,186, вследствие чего их идеальный термический КПД (в соответствии с формулой (3)) составляет всего 4,76 %, а с учётом потерь в реальном двигателе эта величина становится почти равной 0. Это означает, что на скоростях полёта при M<0,5 ПВРД неработоспособен. Но и на предельной для дозвукового диапазона скорости, при М=1 степень повышения давления составляет 1,89, а идеальный термический КПД — 16,7 %, что в 1,5 раза меньше чем у реальных поршневых ДВС, и вдвое меньше, чем у газотурбинных двигателей. К тому же, и поршневые, и газотурбинные двигатели эффективны при работе на месте.
По этим причинам дозвуковые прямоточные двигатели оказались неконкурентоспособными в сравнении с авиадвигателями других типов и в настоящее время серийно не выпускаются.
Сверхзвуковые ПВРД (СПВРД) предназначены для полётов в диапазоне 1 < M < 5.
Торможение сверхзвукового газового потока происходит всегда разрывно (скачкообразно) — с образованием ударной волны, называемой также скачком уплотнения. Процесс сжатия газа на фронте ударной волны не является изоэнтропийным, вследствие чего в нём имеют место необратимые потери механической энергии, и степень повышения давления в нём меньше, чем в идеальном — изоэнтропийном процессе. Чем интенсивнее скачок уплотнения, то есть чем больше изменение скорости потока на его фронте, — тем больше потери давления, которые могут превышать 50 %.
 Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.
Процесс торможения сверхзвукового потока во входном устройстве конического течения, внешнего сжатия с тремя скачками уплотнения. М — график изменения числа Маха в потоке; p — график изменения статического давления.  Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.
Беспилотный разведчик Lockheed D-21B (США). ПВРД с асимметричным входным устройством с центральным телом.  Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция)
Плоские входные устройства внутреннего сжатия ПВРД крылатой ракеты воздух — земля ASMP (Франция) Потери давления удаётся минимизировать за счёт организации сжатия не в одном, а в нескольких (обычно, не более 4-х) последовательных скачках уплотнения меньшей интенсивности, после каждого из которых (кроме последнего), скорость потока снижается, оставаясь сверхзвуковой. Это возможно, если все скачки (кроме последнего) являются косыми, фронт которых наклонён к вектору скорости потока. (Косой скачок уплотнения образуется, когда сверхзвуковой поток встречается с препятствием, поверхность которого наклонена к вектору скорости воздушного потока.) В промежутках между скачками параметры потока остаются постоянными. В последнем скачке (всегда прямом — нормальном к вектору скорости воздушного потока) скорость становится дозвуковой и дальнейшее торможение и сжатие воздуха происходит непрерывно в расширяющемся канале диффузора.
В случае, если входное устройство двигателя находится в зоне невозмущённого потока, например, в носовом окончании летательного аппарата, или на консоли на достаточном удалении от фюзеляжа, оно исполняется осесимметричным и снабжается центральным телом — длинным острым «конусом», выступающим из обечайки, назначение которого состоит в создании во встречном потоке системы косых скачков уплотнения, обеспечивающих торможение и сжатие воздуха ещё до поступления его в канал входного устройства — т. н. внешнее сжатие. Такие входные устройства называются также устройствами конического течения, потому что поток воздуха в них имеет коническую форму. Коническое центральное тело может быть снабжено механическим приводом, позволяющим перемещаться ему вдоль оси двигателя, оптимизируя тем самым торможение воздушного потока на различных скоростях полета. Такие входные устройства именуются регулируемыми.
При установке двигателя на нижней (боковой) стенке фюзеляжа, или под крылом летательного аппарата, то есть в зоне аэродинамического влияния его элементов, обычно применяются плоские входные устройства двухмерного течения, имеющие прямоугольное поперечное сечение, без центрального тела. Система скачков уплотнения в них обеспечивается благодаря внутренней форме канала. Они называются также устройствами внутреннего или смешанного сжатия, так как внешнее сжатие частично имеет место и в этом случае — в скачках уплотнения, образованных у носового окончания и/или у передней кромки крыла летательного аппарата. Регулируемые входные устройства прямоугольного сечения имеют меняющие своё положение клинья внутри канала.
В сверхзвуковом диапазоне скоростей ПВРД значительно более эффективен, чем в дозвуковом. Например, на скорости М=3 для идеального ПВРД степень повышения давления по формуле (2) составляет 36,7, что сравнимо с показателями самых высоконапорных компрессоров турбореактивных двигателей, а термический КПД теоретически (по формуле (3)) достигает 64,3 %. У реальных ПВРД эти показатели ниже, но даже с учётом потерь, в диапазоне полётного числа Маха от 3 до 5 СПВРД превосходят по эффективности ВРД всех других типов.
При торможении встречного потока воздуха он не только сжимается, но и нагревается, и его абсолютная температура при полном торможении (в изоэнтропийном процессе) выражается формулой:
 где
где  — температура невозмущённого потока.
— температура невозмущённого потока. При М=5 и Тo=273K (что соответствует 0 °C) температура заторможенного рабочего тела достигает 1638К, при М=6 — 2238К, а с учётом трения и скачков уплотнения в реальном процессе — ещё выше. При этом дальнейший нагрев рабочего тела за счёт сжигания топлива становится проблематичным из-за ограничений, накладываемых термической устойчивостью конструкционных материалов, из которых изготовлен двигатель. Потому скорость, соответствующая М=5 считается предельной для СПВРД
 Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)
Экспериментальный гиперзвуковой летательный аппарат X-43 (Рисунок художника)  Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой.
Иллюстрация газодинамических процессов в плоском ГПВРД с соплом SERN Сжатие воздуха происходит в двух скачках уплотнения: внешнем, образованным у носового окончания аппарата, и внутреннем — у передней кромки нижней стенки двигателя. Оба скачка — косые и скорость потока остаётся сверхзвуковой. Гиперзвуковым ПВРД (ГПВРД, англоязычный термин — Scramjet) называется ПВРД, работающий на скоростях полёта свыше 5М, (верхний предел точно не устанавливается).
На начало XXI в. этот тип двигателя является экспериментальным: не существует ни одного образца, прошедшего лётные испытания, подтвердившие практическую целесообразность его серийного производства.
Торможение потока воздуха во входном устройстве ГПВРД происходит лишь частично, так что на протяжении всего остального тракта движение рабочего тела остаётся сверхзвуковым. При этом бо́льшая часть исходной кинетической энергии потока сохраняется, а температура после сжатия относительно низка, что позволяет сообщить рабочему телу значительное количество тепла. Проточная часть ГПВРД расширяется на всём её протяжении после входного устройства. Горючее вводится в сверхзвуковой поток со стенок проточной части двигателя. За счёт сжигания горючего в сверхзвуковом потоке рабочее тело нагревается, расширяется и ускоряется, так что скорость его истечения превышает скорость полёта.
Двигатель предназначен для полётов в стратосфере. Возможное назначение летательного аппарата с ГПВРД — низшая ступень многоразового носителя космических аппаратов.
Организация горения топлива в сверхзвуковом потоке составляет одну из главных проблем создания ГПВРД.
Существует несколько программ разработок ГПВРД в разных странах, все — в стадии теоретических изысканий или предпроектных экспериментов.
ПВРД неработоспособен при низких скоростях полёта, тем более — при нулевой скорости. Для достижения начальной скорости, при которой он становится эффективным, аппарат с этим двигателем нуждается во вспомогательном приводе, который может быть обеспечен, например, твёрдотопливным ракетным ускорителем, или самолётом-носителем (самолетом-разгонщиком), с которого запускается аппарат с ПВРД.
Неэффективность ПВРД на малых скоростях полёта делает его практически неприменимым на пилотируемых самолётах с неядерной двигательной системой[1], но для беспилотных, в том числе боевых (в частности, крылатых ракет), одноразового применения, летающих в диапазоне скоростей 2 < M < 5, благодаря своей простоте, дешевизне и надёжности, он предпочтителен. Так же ПВРД используются на летающих мишенях. Основным конкурентом ПВРД в этой нише является ракетный двигатель.

Во второй половине 50-х годов ХХ в., в эпоху холодной войны, В США и СССР разрабатывались проекты ПВРД с ядерным реактором.
Источником энергии этих ПВРД (в отличие от остальных ВРД) является не химическая реакция горения топлива, а тепло, вырабатываемое ядерным реактором в камере нагрева рабочего тела. Воздух из входного устройства в таком ПВРД проходит через активную зону реактора, охлаждая его, нагревается сам до рабочей температуры (около 3000 К), а затем истекает из сопла со скоростью, сравнимой со скоростями истечения для самых совершенных химических ЖРД. Возможное назначения летательного аппарата с таким двигателем:
В обеих странах были созданы компактные малоресурсные ядерные реакторы, которые вписывались в габариты большой ракеты. В США по программам исследований ядерного ПВРД «Pluto» и «Tory» в 1964 г. были проведены стендовые огневые испытания ядерного прямоточного двигателя «Tory-IIC» (режим полной мощности 513 мегаватт в течение пяти минут с тягой 156 kN). Лётные испытания не проводились, программа была закрыта в июле 1964 г. Одна из причин закрытия программы — совершенствование конструкции баллистических ракет с химическими ракетными двигателями, которые вполне обеспечили решение боевых задач без применения схем с сравнительно дорогостоящими ядерными ПВРД.
Тем не менее ядерный ПВРД перспективен как двигательная система для одноступенчатых воздушно-космических самолётов и скоростной межконтинентальной тяжёлой транспортной авиации. Этому способствует возможность создания ядерного ПВРД, способного работать на дозвуковых и нулевых скоростях полёта в режиме ракетного двигателя, используя бортовые запасы рабочего тела. Т. е., например, воздушно-космический самолёт с ядерным ПВРД стартует (в том числе взлетает), подавая в двигатели рабочее тело из бортовых (или подвесных) баков и, уже достигнув скорости от 1М, переходит на использование атмосферного воздуха.
3dic.academic.ru
(ПВРД) - бескомпрессорный воздушно-реактивный двигатель, в к-ром сжатие воздуха происходит за счёт кинетич. энергии набегающего возд. потока. Для ЛА с ПВРД необходим дополнит. двигатель для разгона до скорости включения ПВРД, к-рая может в 1,5 - 2 раза превышать скорость звука, поскольку ПВРД эффективен только на больших сверхзвук, скоростях полёта. До поступления в камеру сгорания (см. рис.) воздух тормозится в воздухозаборнике (диффузоре) до дозвуковой скорости. Для скоростей полёта, соответствующих Маха числу М > 6, предназначены гиперзвуковые ПВРД (ГПВРД), в к-рых сжигание топлива производится в менее заторможенном, сверхзвук, потоке.

Схема прямоточного воздушно-реактивного двигателя (ПВРД): 1 - воздух; 2 - воздухозаборник; 3 - горючее; 4 - стабилизатор пламени; 5 - камера сгорания; 6 - реактивное сопло; 7 - истечение газов
Большой энциклопедический политехнический словарь. 2004.
Прямоточный воздушно-реактивный двигатель — (ПВРД) бескомпрессорный воздушно реактивный двигатель, в котором сжатие воздуха производится в воздухозаборнике за счёт кинетической энергии набегающего потока атмосферного воздуха (схему ПВРД см. в статье Воздушно реактивный двигатель). ПВРД… … Энциклопедия техники
ПРЯМОТОЧНЫЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ — (ПВРД), авиационный РЕАКТИВНЫЙ ДВИГАТЕЛЬ, реактивный мотор, приводящий в движение летательный аппарат с помощью скоростного потока воздуха, сжимаемого в приемном устройстве и используемого при СГОРАНИИ УГЛЕВОДОРОДНОГО топлива. Единственная… … Научно-технический энциклопедический словарь
ПРЯМОТОЧНЫЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ — (ПВРД) реактивный двигатель, в котором непрерывно поступающий в камеру сгорания воздух сжимается под действием скоростного напора. Имеет большую тягу при сверхзвуковых скоростях полета; отсутствует статичная тяга (необходим принудительный старт) … Большой Энциклопедический словарь
прямоточный воздушно-реактивный двигатель — ПВРД — [http://slovarionline.ru/anglo russkiy slovar neftegazovoy promyishlennosti/] Тематики нефтегазовая промышленность Синонимы ПВРД EN ram jet … Справочник технического переводчика
Прямоточный воздушно-реактивный двигатель — Основная статья: Воздушно реактивный двигатель Огневые испытания ПВРД в лаборатории NASA … Википедия
прямоточный воздушно-реактивный двигатель — Рис. 1. Компоновки ЛА с ПВРД. прямоточный воздушно реактивный двигатель (ПВРД) бескомпрессорный воздушно реактивный двигатель, в котором сжатие воздуха производится в воздухозаборнике за счёт кинетической энергии набегающего потока… … Энциклопедия «Авиация»
прямоточный воздушно-реактивный двигатель — Рис. 1. Компоновки ЛА с ПВРД. прямоточный воздушно реактивный двигатель (ПВРД) бескомпрессорный воздушно реактивный двигатель, в котором сжатие воздуха производится в воздухозаборнике за счёт кинетической энергии набегающего потока… … Энциклопедия «Авиация»
прямоточный воздушно-реактивный двигатель — Рис. 1. Компоновки ЛА с ПВРД. прямоточный воздушно реактивный двигатель (ПВРД) бескомпрессорный воздушно реактивный двигатель, в котором сжатие воздуха производится в воздухозаборнике за счёт кинетической энергии набегающего потока… … Энциклопедия «Авиация»
прямоточный воздушно-реактивный двигатель — Рис. 1. Компоновки ЛА с ПВРД. прямоточный воздушно реактивный двигатель (ПВРД) бескомпрессорный воздушно реактивный двигатель, в котором сжатие воздуха производится в воздухозаборнике за счёт кинетической энергии набегающего потока… … Энциклопедия «Авиация»
прямоточный воздушно-реактивный двигатель — oro reaktyvinis tiesiasrovis variklis statusas T sritis Energetika apibrėžtis Oro reaktyvinis variklis, kurio įėjimo difuzoriuje orą slegia tekančio oro srauto kinetinė energija. Darbo procesas nenutrūkstamas. Oro reaktyvinis tiesiasrovis… … Aiškinamasis šiluminės ir branduolinės technikos terminų žodynas
dic.academic.ru
Эжекторный прямоточный воздушно-реактивный двигатель для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, содержит воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока, смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки. Узел распылительной головки содержит распылительное кольцо с выполненными в нем несколькими сопловыми отверстиями, которые ориентированы для направления потока текучей среды на выходе в направлении потока с частичным смещением относительно продольной оси двигателя. За смесителем установлены диффузор, выполненный с поперечным сечением, увеличивающимся в направлении потока, и камера сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и система подачи топлива, связанная с камерой сгорания. Установленное за камерой сгорания выходное сопло имеет расширяющуюся часть с поперечным сечением, превышающим поперечное сечение камеры сгорания, и снабжено переходным дросселем, расположенным между камерой сгорания и выходным соплом. По продольной оси двигателя в камере сгорания установлен центральный обтекатель, снабженный установленным на нем устройством управления регулируемым сечением выходного сопла. Изобретение позволяет работать двигателю в диапазоне скоростей от нулевой до гиперзвуковой и на высотах до примерно 46 км. 4 с. и 2 з.п. ф-лы, 10 ил.
Область техники, к которой относится изобретение Изобретение относится к устройствам, используемым в качестве двигателей летательных аппаратов, таких как самолеты, воздушно-космические аппараты, а также различные ракеты. Усовершенствованный двигатель представляет собой комбинацию эжекторного и прямоточного компонентов, обеспечивающую высокие характеристики двигателя в диапазоне скоростей полета от нулевой до гиперзвуковых.
Уровень техники В литературе описаны различные подходы к созданию прямоточных воздушно-реактивных двигателей и к использованию в подобных двигателях распылительных головок для формирования термодинамического насоса (эжектора), функционирующего в сочетании с прямоточным циклом. Однако, насколько известно, ни одного реально работающего эжекторно-прямоточного двигателя для функционирования в диапазоне скоростей от нулевой до гиперзвуковых пока не создано. Эжекторный прямоточный воздушно-реактивный двигатель (называемый далее также эжекторно-прямоточным двигателем) обладает по сравнению с традиционным прямоточным воздушно-реактивным двигателем определенными преимуществами, такими как статическая тяга при нулевой высоте и тяга двигателя при низких скоростях полета. Эжекторно-прямоточный двигатель способен обеспечить в конкретных условиях полета большую тягу, чем традиционный прямоточный воздушно-реактивный двигатель. Это преимущество может быть особенно важным во время разгона летательного аппарата до сверхзвуковых скоростей и при гиперзвуковых скоростях, при которых тяга, создаваемая прямоточным двигателем, может не отвечать требованиям, характерным для данного аппарата. Может быть достигнуто также улучшение параметров работы камеры сгорания, что позволяет камере сгорания функционировать на больших высотах, чем это достижимо при использовании прямоточного воздушно-реактивного двигателя. Эжекторно-прямоточный двигатель позволяет также подавать избыточное количество кислорода для того, чтобы обогатить окислитель в камере сгорания и тем самым дополнительно усилить тягу. Способы осуществления смешения текучих сред или гиперсмешения описаны, например, в патенте США 4257224, 24.03.1981 и в статье Richard В. Fancher "Low-Area Ration, Thrust-Augmenting Ejectors", Journal of Aircraft, volume 9, 3, March 1972, pp. 234-248. В патенте 4257224 описаны способ и устройство для улучшение смешения двух текучих сред с использованием активного элемента у начала зоны смешения. В обеих текучих средах создают осцилляции в направлении оси, по существу перпендикулярной оси течения потока в зоне смешения. В указанной статье обсуждаются различные методы гиперсмешения; описываются также схема и конструкция экспериментального эжектора. Описанная конструкция предусматривает первичное сопло, которое сегментировано на 24 элемента длиной по 3,8 см. Каждый элемент придает выходящей из него массе компонент скорости, перпендикулярный как к главной оси сопла, так и к оси потока, причем направление этого компонента поперечной скорости варьировалось от элемента к элементу. Были предложены и другие способы усовершенствования реактивных двигателей или прямоточных воздушно-реактивных двигателей, раскрытые, в частности, в описаниях к патентам США 5129227, 14.07.1992 и 5327721, 12.07.1994. В патенте США 5327721 представлен прямоточный воздушно-реактивный двигатель, снабженный системой, направленной на улучшение переноса текучей среды по сравнению с известными системами. Предусматривается модулированный режим работы распылительной головки с тем, чтобы изменять направление первичной струи текучей среды в эжекторе и тем самым обеспечить вовлечение вторичной текучей среды. Осцилляции первичной струи обеспечивают энергообмен между первичной и вторичной средами в канале создания тяги в режиме, по существу, отсутствия вязкости. Основным недостатком данного двигателя является конструктивная сложность указанной системы формирования текучей среды. Среди известных решений наиболее близким к настоящему изобретению является эжекторный прямоточный воздушно-реактивный двигатель по патенту США 5129227, предназначенный для использования в широком диапазоне скоростей, от нулевой до гиперзвуковых. Известный двигатель содержит воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока, смеситель с распылительной головкой, установленной в смесителе со стороны воздухозаборника с образованием эжектора, снабженный системой подачи текучей среды, связанной с узлом распылительной головки, установленный за смесителем диффузор с поперечным сечением, увеличивающимся в направлении потока, камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, снабженную системой подачи топлива, и установленное за камерой сгорания реактивное сопло. Известный двигатель не предусматривает возможности гибкого регулирования геометрии реактивного сопла и, как следствие, не обеспечивает максимальной эффективности работы воздухозаборника при полете в широком диапазоне скоростей, особенно на больших высотах. Сущность изобретения Основная задача, решение которой обеспечено настоящим изобретением, заключается в создании эжекторного прямоточного воздушно-реактивного двигателя, способного работать в диапазоне скоростей от нулевой до гиперзвуковых. Следующая задача заключается в обеспечении возможности работы эжекторного прямоточного воздушно-реактивного двигателя, пригодного для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, на высотах от уровня моря до примерно 46 км. Для решения этой задачи предлагается эжекторный прямоточный воздушно-реактивный двигатель, содержащий а) воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока, б) смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки, в) диффузор, установленный за смесителем и выполненный с поперечным сечением, увеличивающимся в направлении потока, г) установленную за диффузором камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и систему подачи топлива, связанную с камерой сгорания, и д) установленное за камерой сгорания реактивное сопло. Главные отличительные особенности двигателя согласно настоящему изобретению заключаются в том, что его проточный тракт выполнен с сечением минимальной площади, расположенным между камерой сгорания и выходом реактивного сопла, а реактивное сопло выполнено регулируемым по сечению и с расширяющейся частью, поперечное сечение которой превышает поперечное сечение камеры сгорания. При этом двигатель дополнительно содержит центральный обтекатель, установленный по продольной оси двигателя в камере сгорания и выходном сопле и снабженный установленным на нем устройством управления регулируемым сечением реактивного сопла. Наличие указанного устройства управления, предпочтительно выполненного в виде центральной вставки, обладающей возможностью перемещения и установленной в камере сгорания и в реактивном сопле соосно с центральным обтекателем с возможностью контролируемого управления ее положением, существенно расширяет возможности оптимизации работы двигателя при различных скоростях и высотах полета. Узел распылительной головки предпочтительно содержит распылительное кольцо, установленное на множестве распорок, прикрепленных к внутренней стенке двигателя. В этом кольце выполнено множество сопловых отверстий, причем главная ось каждого соплового отверстия параллельна продольной оси двигателя и смежные сопловые отверстия развернуты в чередующемся порядке в противоположные стороны относительно продольной оси двигателя или направления потока текучей среды. В предпочтительном варианте указанные сопловые отверстия выполнены в форме щелевых прорезей с горловиной, образованной первой выходной и второй, смещенной, выходными поверхностями. Предусмотрена также возможность использования системы подачи текучей среды к эжектору, выполненной в виде камеры сгорания, внешней или внутренней, по отношению к эжектору, для образования газа, используемого в узле распылительной головки. Альтернативно, система подачи текучей среды может представлять собой систему подачи горючего и окислителя. В этом случае в распылительной головке дополнительно предусмотрено множество распылительных камер, каждая из которых связана с одним из сопловых отверстий. Для того, чтобы эжекторный прямоточный двигатель мог функционировать на летательных аппаратах, имеющих скорости от нулевой до гиперзвуковой, можно применить в распылительной головке процесс с циклом жидкого воздуха, в котором используются охлаждающие свойства запасенного на борту жидкого водорода, обеспечивающего сжижение окружающего воздуха для ввода в камеру сгорания распылительной головки в качестве окислителя. В этом случае двигатель должен содержать теплообменную систему для сжижения и хранения сжиженного воздуха. При наличии запаса избыточного жидкого воздуха его можно использовать для увеличения потока воздуха на входе в тех случаях, когда давление поступающего на вход потока воздуха оказывается недостаточным для поддерживания горения в камере сгорания. В предпочтительном варианте выполнения у двигателя имеется также узел направляющих лопаток, содержащий направляющую лопатку, зафиксированную посредством распорок, прикрепленных к внутренней стенке двигателя и к центральному обтекателю, входящему в диффузор в зоне потока текучей среды в диффузоре. Система подачи топлива выполнена в этом случае в виде части направляющей лопатки, расположенной в дальнем по ходу потока конце лопатки и снабженной множеством топливных сопел, связанных с источником горючего. Далее, со ссылками на прилагаемые чертежи, будет дано описание предпочтительного варианта выполнения изобретения. Перечень фигур чертежей Фиг. 1 представляет перспективное изображение основных компонентов эжекторного прямоточного воздушно-реактивного двигателя, представленных в разрезе с целью пояснить внутреннюю структуру двигателя, снабженного внешним входом, размещенным на летательном аппарате со смещением относительно оси двигателя. На фиг.2 схематично (в сечении) представлен вариант эжекторного прямоточного воздушно-реактивного двигателя с усеченной входной частью. На фиг.3 показан вид в плане многокомпонентной кольцевой распылительной головки со щелевыми сопловыми отверстиями. На фиг.4 изображена часть распылительного кольца с чередованием сопловых отверстий, развернутых в различные стороны или имеющих различный наклон относительно центральной линии смесителя. На фиг.5 представлено поперечное сечение распылительного кольца с камерой сгорания и сопловым отверстием, ориентированным от центральной линии смесителя. На фиг.6 представлено поперечное сечение распылительного кольца с камерой сгорания и сопловым отверстием, ориентированным в направлении центральной линии смесителя. Фиг.7 иллюстрирует вид в плане узла направляющих лопаток диффузора с топливными форсунками. Фиг. 8 представляет схематичную иллюстрацию варианта изобретения, в котором генератор горячего газа эжектора является интегральной частью узла распылительной головки. Фиг. 9 иллюстрирует способ утилизации латентного тепла топлива, а именно жидкого водорода, для генерирования окислителя, т.е. жидкого воздуха. Фиг. 10 представляет схематичную иллюстрацию варианта изобретения, в котором генератор горячего газа эжектора расположен внешне по отношению к узлу распылительной головки, так что горячий газ подается в камеру распылительной головки по соответствующему тракту. Сведения, подтверждающие возможность осуществления изобретения Эжекторный прямоточный воздушно-реактивный двигатель представляет собой усовершенствование традиционного прямоточного воздушно-реактивного двигателя, содержащего такие компоненты или секции, как воздухозаборник, смеситель, диффузор, камеру сгорания и выходное сопло, и соединенные в названном порядке от входной части до выходного (реактивного) сопла в единое целое. Двигателю может быть придана любая форма, облегчающая его установку на летательном аппарате и функционирование каждого компонента в рабочем цикле двигателя. Как будет описано далее применительно к предпочтительному варианту выполнения изобретения, предполагается, что двигатель имеет круглое поперечное сечение с входным обтекателем квадратного сечения. Узел распылительной головки кольцевой формы с выполненными в ней распылительными камерами установлен в смесительной секции со стороны входа продольной оси двигателя таким образом, чтобы сформировать эжектор. Кольцевой компонент распылительной головки может быть связан с камерой сгорания, в которой образуется горячий газ для распыления его в смеситель через сопловые отверстия или щелевые прорези в кольцевой распылительной головке. Форсунки для подачи топлива к секции камеры сгорания расположены в дальнем по ходу потока конце направляющих лопаток, установленных в секции диффузора. Направляющие лопатки способствуют более быстрому расширению потока газа по диффузору без отрыва текучей среды от стенок диффузора. На центральном обтекателе установлена центральная вставка сопла, выполненная с возможностью перемещения, за счет чего обеспечивается его осевая настройка для регулировки положения выхода камеры сгорания и сечения реактивного сопла относительно минимального поперечного сечения. Перемещаемая центральная вставка осуществляет управление давлением внутри двигателя выше по потоку для того, чтобы регулировать нормальное положение ударной волны на входе таким образом, чтобы добиться правильного режима работы и сгорания в двигателе. Кроме того, эта центральная вставка задает поперечное сечение потока в зоне максимального сужения. Соответствующая методология управления позволяет оптимизировать требуемую величину поперечного сечения и положение ударной волны и тем самым улучшить качество работы и достигаемую тягу. Как показано на фиг.1-3, эжекторный прямоточный реактивно-воздушный двигатель 1 содержит входную часть 2, смеситель 4, в состав которого входит эжектор 3, диффузор 5, камеру 6 сгорания, сужение (минимальное сечение) 7 и реактивное сопло 8, расположенные последовательно вдоль оси потока текучей среды и выполненные в виде единого целого. Согласно предпочтительному варианту выполнения названные компоненты выполнены, по существу, симметричными относительно продольной оси 9. Однако в зависимости от особенностей монтажа двигателя 1 в конкретном летательном аппарате некоторые элементы, например реактивное сопло 8, могут быть выполнены наклонными, криволинейными или изогнутыми по отношению к другим компонентам для обеспечения заданного направления выходного потока. В типичном эжекторном прямоточном воздушно-реактивном двигателе 1 для обеспечения необходимой жесткости в отношении структурных сил и для осуществления монтажа двигателя в аппарате обычно в единственной наружной стенке асимметричной конструкции предусматриваются также ребра жесткости, фланцы и интеркостальный шпангоут. С учетом условий длительности работы может оказаться необходимым использование охлаждения компонентов двигателя и нанесение теплоизолирующей пленки на его внутренние или наружные стенки. В частности, камера сгорания 6 и сужение 7 могут быть охлаждаемыми. Для этого в двигателе могут быть предусмотрены зоны, через которые может прокачиваться топливо, такое как жидкий водород, с целью охлаждения двигателя, а также нагрева топлива с тем, чтобы улучшить параметры горения. В зоне смесителя 4, соответствующей эжектору 3, имеется узел распылительной головки 10, содержащей одно или более распылительных колец 11, установленных на распорках 12 в потоке текучей среды. Распылительные кольца могут представлять собой обтекаемую полую трубу с сопловыми отверстиями 13 или выполненными в трубе щелевыми прорезями. Предпочтительно, однако, выполнить кольцо 11 распылительной головки в виде узла кольцевой формы с аэродинамическим поперечным сечением, с распылительными камерами 25, распределенными по кольцу 11 распылительной головки, как это показано на фиг. 4-6. Сопловые отверстия 13 ориентированы таким образом, чтобы направлять поток текучей среды на выходе в направлении продольного воздушного потока двигателя с частичным смещением относительно его оси. Кроме того, как это показано на фиг.4-6, сопловые отверстия 13 выполнены таким образом, что они в чередующемся порядке ориентированы с угловым смещением по отношению друг к другу или с угловым отклонением (поочередно в одну и другую сторону) от параллельности продольной оси 9 двигателя. В представленном на фиг. 2-6 экспериментальном варианте сопловые отверстия 13 распылительной головки были сформированы в форме щелевых прорезей, причем продольные оси смежных прорезей были развернуты в чередующемся порядке под углом , составляющим 15o, в направлении к продольной оси 9 двигателя и в противоположном направлении. Каждая прорезь выполнена таким образом, что у соплового отверстия 13 имеется первая выходная поверхность 37, параллельная продольной оси 9 двигателя, и вторая, смещенная выходная поверхность 38, смещенная с этой оси, между которыми образуется горловина 39 с размером, необходимым для обеспечения нормального функционирования эжектора 3. Благодаря этому скорость выходящего газа имеет компоненту, направленную перпендикулярно продольной оси 9 и потоку текучей среды на входе. В результате текучая среда от смежных сопел направляется с чередованием в направлении внутренней стенки 14 секции 4 смесителя и к продольной оси 9 двигателя. Разворот сопловых отверстий 13 с чередованием направления разворота способствует более быстрому смешению топлива, вводимого через распылительное кольцо 11, с увлекаемым или набегающим потоком воздуха из секции 2 воздухозаборника. Как следствие, в эжекторном прямоточном реактивно-воздушном двигателе можно значительно сократить длину смесителя 4. В конкретном экспериментальном варианте было использовано единственное распылительное кольцо 11 распылительной головки; при этом длина смесителя 4 составила 33 см, а его диаметр 20 см, что обеспечило возможность значительного уменьшения длины двигателя. В этом эксперименте камера 15 сгорания распылительной головки или генератор горячего газа (фиг.10) находится снаружи смесительной секции 4, так что газообразные продукты сгорания подводятся по соответствующему тракту к распылительному кольцу 11 для распыления через сопловые отверстия 13 или щелевые прорези распылительной головки. Как показано на фиг.8 и 10, для того, чтобы создать высокоэнергетическую газовую струю в узле распылительной головки 10, она может быть связана с любым подходящим источником текучей среды, подающим текучую среду с формированием струи на сопловых отверстиях 13 распылительной головки для создания в эжекторе 3 эффекта увлечения воздуха для получения потока текучей среды, достаточного для обеспечения смешения с топливом в камере сгорания, необходимого для эффективного функционирования эжекторного прямоточного воздушно-реактивного двигателя 1. В нормальном режиме работы топливо, такое как водород, и окислитель, например воздух, могут подаваться в камеру 15 сгорания распылительной головки, внешнюю по отношению к двигателю 1, в стехиометрическом отношении для создания энергетического потока газа под давлением, который поступает по газовым каналам 30 в распылительной головке 10. Альтернативно, сжигание горючего может производиться внутри узла распылительной головки 10, в распылительных камерах 25, к которым подаются как горючее, так и окислитель. Как показано на фиг.9, на летательном аппарате, на котором установлен эжекторный реактивный двигатель 1, может иметься запас жидкого водорода. Для достижения более высоких характеристик аппарата воздух может поступать непосредственно из окружающей среды. Жидкий водород может быть использован в теплообменной системе 36 для сжижения воздуха с целью его временного хранения и последующего использования в процессе движения аппарата вместо того, чтобы хранить большие объемы жидкого воздуха или другого окислителя перед началом работы аппарата. Теплообменная система 36 получает жидкий водород 34 или другое горючее, подаваемое из топливного бака летательного аппарата топливным насосом 26, который снабжает горючим под давлением устройство 27 сжижения воздуха. Воздух, собираемый воздухозаборником 31 устройства 27, поступает далее в это устройство, где он конденсируется в промежуточном резервуаре. Связанный с этим резервуаром насос 35 поднимает давление, в результате чего жидкий воздух 33 поступает в бак для хранения или в канал 28 подачи воздуха. Поток 32 водорода с выхода устройства 27 обычно поступает на топливный вход 29 двигателя. Из фиг.1 и 2 видно, что для обеспечения правильной геометрии входной части у эжекторного прямоточного воздушно-реактивного двигателя 1 имеется входной обтекатель 16 и воздухозаборник 2, причем входная часть, с целью кондиционирования входящего воздуха, может включать соответствующую структуру планера летательного аппарата. Предусмотрен также центральный обтекатель 17 для диффузора 5, камеры сгорания 6 и реактивного сопла 8, который обеспечивает улучшение характеристик двигателя. Глубина вхождения этого обтекателя в диффузор зависит от конкретного применения двигателя. Чтобы добиться быстрого расширения потока текучей среды, в диффузоре 5 может быть использован узел 18 направляющих лопаток 18. Узел 18 содержит одну или более направляющих лопаток 19, ориентированных в осевом направлении в потоке текучей среды внутри диффузора 5 и зафиксированных посредством распорок 20. В данном варианте топливные форсунки 21 могут представлять собой топливные сопла 22 (фиг. 7), выполненные в направляющих лопатках 19 в их дальнем, по ходу потока, конце 23. Топливные сопла 22 могут впрыскивать топливо параллельно продольной оси 9 двигателя или, альтернативно, могут быть развернуты относительно этой оси для того, чтобы способствовать смешению текучих сред, как это было описано ранее применительно к сопловым отверстиям 13. Для дальнейшего улучшения смешения и сгорания на центральном обтекателе 17 установлена центральная вставка 24, выполненная с возможностью перемещения и снабженная средствами контроля или настройки ее положения посредством штока, связанного с поршнем (не изображен), имеющимися в центральном обтекателе 17. Этот контроль осуществляется с помощью системы мониторинга работы двигателя и включает управление положением центральной вставки в осевом направлении. В результате настройки положения центральной вставки относительно самого узкого поперечного сечения 7 реактивного сопла происходит изменение площади поперечного сечения камеры 6 сгорания, с изменением площади и положения самого узкого сечения 7, что обеспечивает регулировку аэродинамической локализации ударной волны. Очевидно, что при этом происходит также изменение геометрии реактивного сопла. На фиг. 2 переставляемая вставка 24 представлена в разрезе для того, чтобы показать два ее положения. Таким образом, применение перемещаемой вставки 24 обеспечивает один из способов изменения геометрии для управления положением самого узкого сечения реактивного сопла, что также соответствует регулировке локализации ударной волны, внутренней скорости, обеспечиваемой двигателем, а также давления с учетом характеристик среды, окружающей эжекторный прямоточный реактивно-воздушный двигатель 1. В типичном случае предусматривается охлаждение центральной вставки, например, с помощью горючего (жидкого водорода), поступающего в каналы охлаждения, выполненные во вставке 24, перед подачей его в камеру 6 сгорания. Применение реактивного сопла 8 с регулируемой площадью минимального сечения обеспечивает работу двигателя при максимальной эффективности воздухозаборника 2. В результате число Маха на выходе смесителя 4 может приблизиться к скорости звука (но не достичь ее). Использование такого регулируемого реактивного сопла 8 гарантирует возможность избежать локальной локализации самого узкого сечения в смесителе 4 или в диффузоре 5.
, составляющим 15o, в направлении к продольной оси 9 двигателя и в противоположном направлении. Каждая прорезь выполнена таким образом, что у соплового отверстия 13 имеется первая выходная поверхность 37, параллельная продольной оси 9 двигателя, и вторая, смещенная выходная поверхность 38, смещенная с этой оси, между которыми образуется горловина 39 с размером, необходимым для обеспечения нормального функционирования эжектора 3. Благодаря этому скорость выходящего газа имеет компоненту, направленную перпендикулярно продольной оси 9 и потоку текучей среды на входе. В результате текучая среда от смежных сопел направляется с чередованием в направлении внутренней стенки 14 секции 4 смесителя и к продольной оси 9 двигателя. Разворот сопловых отверстий 13 с чередованием направления разворота способствует более быстрому смешению топлива, вводимого через распылительное кольцо 11, с увлекаемым или набегающим потоком воздуха из секции 2 воздухозаборника. Как следствие, в эжекторном прямоточном реактивно-воздушном двигателе можно значительно сократить длину смесителя 4. В конкретном экспериментальном варианте было использовано единственное распылительное кольцо 11 распылительной головки; при этом длина смесителя 4 составила 33 см, а его диаметр 20 см, что обеспечило возможность значительного уменьшения длины двигателя. В этом эксперименте камера 15 сгорания распылительной головки или генератор горячего газа (фиг.10) находится снаружи смесительной секции 4, так что газообразные продукты сгорания подводятся по соответствующему тракту к распылительному кольцу 11 для распыления через сопловые отверстия 13 или щелевые прорези распылительной головки. Как показано на фиг.8 и 10, для того, чтобы создать высокоэнергетическую газовую струю в узле распылительной головки 10, она может быть связана с любым подходящим источником текучей среды, подающим текучую среду с формированием струи на сопловых отверстиях 13 распылительной головки для создания в эжекторе 3 эффекта увлечения воздуха для получения потока текучей среды, достаточного для обеспечения смешения с топливом в камере сгорания, необходимого для эффективного функционирования эжекторного прямоточного воздушно-реактивного двигателя 1. В нормальном режиме работы топливо, такое как водород, и окислитель, например воздух, могут подаваться в камеру 15 сгорания распылительной головки, внешнюю по отношению к двигателю 1, в стехиометрическом отношении для создания энергетического потока газа под давлением, который поступает по газовым каналам 30 в распылительной головке 10. Альтернативно, сжигание горючего может производиться внутри узла распылительной головки 10, в распылительных камерах 25, к которым подаются как горючее, так и окислитель. Как показано на фиг.9, на летательном аппарате, на котором установлен эжекторный реактивный двигатель 1, может иметься запас жидкого водорода. Для достижения более высоких характеристик аппарата воздух может поступать непосредственно из окружающей среды. Жидкий водород может быть использован в теплообменной системе 36 для сжижения воздуха с целью его временного хранения и последующего использования в процессе движения аппарата вместо того, чтобы хранить большие объемы жидкого воздуха или другого окислителя перед началом работы аппарата. Теплообменная система 36 получает жидкий водород 34 или другое горючее, подаваемое из топливного бака летательного аппарата топливным насосом 26, который снабжает горючим под давлением устройство 27 сжижения воздуха. Воздух, собираемый воздухозаборником 31 устройства 27, поступает далее в это устройство, где он конденсируется в промежуточном резервуаре. Связанный с этим резервуаром насос 35 поднимает давление, в результате чего жидкий воздух 33 поступает в бак для хранения или в канал 28 подачи воздуха. Поток 32 водорода с выхода устройства 27 обычно поступает на топливный вход 29 двигателя. Из фиг.1 и 2 видно, что для обеспечения правильной геометрии входной части у эжекторного прямоточного воздушно-реактивного двигателя 1 имеется входной обтекатель 16 и воздухозаборник 2, причем входная часть, с целью кондиционирования входящего воздуха, может включать соответствующую структуру планера летательного аппарата. Предусмотрен также центральный обтекатель 17 для диффузора 5, камеры сгорания 6 и реактивного сопла 8, который обеспечивает улучшение характеристик двигателя. Глубина вхождения этого обтекателя в диффузор зависит от конкретного применения двигателя. Чтобы добиться быстрого расширения потока текучей среды, в диффузоре 5 может быть использован узел 18 направляющих лопаток 18. Узел 18 содержит одну или более направляющих лопаток 19, ориентированных в осевом направлении в потоке текучей среды внутри диффузора 5 и зафиксированных посредством распорок 20. В данном варианте топливные форсунки 21 могут представлять собой топливные сопла 22 (фиг. 7), выполненные в направляющих лопатках 19 в их дальнем, по ходу потока, конце 23. Топливные сопла 22 могут впрыскивать топливо параллельно продольной оси 9 двигателя или, альтернативно, могут быть развернуты относительно этой оси для того, чтобы способствовать смешению текучих сред, как это было описано ранее применительно к сопловым отверстиям 13. Для дальнейшего улучшения смешения и сгорания на центральном обтекателе 17 установлена центральная вставка 24, выполненная с возможностью перемещения и снабженная средствами контроля или настройки ее положения посредством штока, связанного с поршнем (не изображен), имеющимися в центральном обтекателе 17. Этот контроль осуществляется с помощью системы мониторинга работы двигателя и включает управление положением центральной вставки в осевом направлении. В результате настройки положения центральной вставки относительно самого узкого поперечного сечения 7 реактивного сопла происходит изменение площади поперечного сечения камеры 6 сгорания, с изменением площади и положения самого узкого сечения 7, что обеспечивает регулировку аэродинамической локализации ударной волны. Очевидно, что при этом происходит также изменение геометрии реактивного сопла. На фиг. 2 переставляемая вставка 24 представлена в разрезе для того, чтобы показать два ее положения. Таким образом, применение перемещаемой вставки 24 обеспечивает один из способов изменения геометрии для управления положением самого узкого сечения реактивного сопла, что также соответствует регулировке локализации ударной волны, внутренней скорости, обеспечиваемой двигателем, а также давления с учетом характеристик среды, окружающей эжекторный прямоточный реактивно-воздушный двигатель 1. В типичном случае предусматривается охлаждение центральной вставки, например, с помощью горючего (жидкого водорода), поступающего в каналы охлаждения, выполненные во вставке 24, перед подачей его в камеру 6 сгорания. Применение реактивного сопла 8 с регулируемой площадью минимального сечения обеспечивает работу двигателя при максимальной эффективности воздухозаборника 2. В результате число Маха на выходе смесителя 4 может приблизиться к скорости звука (но не достичь ее). Использование такого регулируемого реактивного сопла 8 гарантирует возможность избежать локальной локализации самого узкого сечения в смесителе 4 или в диффузоре 5.Формула изобретения
1. Эжекторный прямоточный воздушно-реактивный двигатель, пригодный для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, содержащий: а) воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока; б) смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки, причем узел распылительной головки содержит распылительное кольцо с выполненными в нем несколькими сопловыми отверстиями, которые ориентированы для направления потока текучей среды на выходе в направлении потока с частичным смещением относительно продольной оси двигателя, причем смежные сопловые отверстия в чередующемся порядке смещены радиально под углом соответственно в направлении от продольной оси двигателя и в противоположном направлении, а распылительное кольцо установлено с помощью нескольких распорных средств, прикрепленных к внутренней стенке двигателя; в) диффузор, установленный за смесителем и выполненный с поперечным сечением, увеличивающимся в направлении потока; г) установленную за диффузором камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и систему подачи топлива, связанную с камерой сгорания, и д) установленное за камерой сгорания выходное сопло, имеющее расширяющуюся часть с поперечным сечением, превышающим поперечное сечение камеры сгорания, и снабженное переходным дросселем, расположенным между камерой сгорания и выходным соплом; е) центральный обтекатель, установленный по продольной оси двигателя в камере сгорания и выходном сопле и снабженный установленным на нем устройством управления регулируемым сечением выходного сопла. 2. Эжекторный прямоточный воздушно-реактивный двигатель по п. 1, отличающийся тем, что сопловые отверстия распылительной головки выполнены в форме щелевых прорезей с горловиной, образованной первой выходной и второй, смещенной, выходными поверхностями. 3. Эжекторный прямоточный воздушно-реактивный двигатель, пригодный для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, содержащий: а) воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока; б) смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки; в) диффузор, установленный за смесителем и выполненный с поперечным сечением, увеличивающимся в направлении потока; г) установленную за диффузором камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и систему подачи топлива, связанную с камерой сгорания, причем система подачи топлива выполнена в виде камеры сгорания распылительной головки, размещенной снаружи эжектора; д) установленное за камерой сгорания выходное сопло, имеющее расширяющуюся часть с поперечным сечением, превышающим поперечное сечение камеры сгорания, и снабженное переходным дросселем, расположенным между камерой сгорания и выходным соплом, и е) центральный обтекатель, установленный по продольной оси двигателя в камере сгорания и выходном сопле и снабженный установленным на нем устройством управления, регулируемым сечением выходного сопла. 4. Эжекторный прямоточный воздушно-реактивный двигатель, пригодный для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, содержащий: а) воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока; б) смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки, при этом узел распылительной головки содержит распылительное кольцо с выполненными в нем несколькими распылительными камерами, каждая из которых соединена с сопловым отверстием, причем распылительное кольцо установлено с помощью нескольких распорок, прикрепленных к внутренней стенке двигателя, система подачи текучей среды является системой подачи топлива и текучей среды окислителя, а сопловые отверстия ориентированы для направления потока текучей среды на выходе в направлении потока с частичным отклонением относительно продольной оси двигателя, причем смежные сопловые отверстия в чередующемся порядке смещены радиально под углом соответственно в направлении от продольной оси двигателя и в противоположном направлении; в) диффузор, установленный за смесителем и выполненный с поперечным сечением, увеличивающимся в направлении потока; г) установленную за диффузором камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и систему подачи топлива, связанную с камерой сгорания; д) установленное за камерой сгорания выходное сопло, имеющее расширяющуюся часть с поперечным сечением, превышающим поперечное сечение камеры сгорания, и снабженное переходным дросселем, расположенным между камерой сгорания и выходным соплом, и е) центральный обтекатель, установленный по продольной оси двигателя в камере сгорания и выходном сопле и снабженный установленным на нем устройством управления регулируемым сечением выходного сопла. 5. Эжекторный прямоточный воздушно-реактивный двигатель по п. 4, отличающийся тем, что сопловые отверстия распылительной головки выполнены в форме щелевых прорезей с горловиной, образованной первой выходной и второй, смещенной, выходными поверхностями. 6. Эжекторный прямоточный воздушно-реактивный двигатель, пригодный для использования на летательном аппарате в широком диапазоне скоростей, от нулевой до гиперзвуковых, содержащий: а) воздухозаборник с относительно небольшим поперечным сечением, присоединенный к смесителю, расположенному далее в проточном тракте в направлении потока; б) смеситель, включающий узел распылительной головки, установленный в зоне потока в смесителе со стороны воздухозаборника с образованием эжектора, и систему подачи текучей среды, связанную с узлом распылительной головки; в) диффузор, установленный за смесителем и выполненный с поперечным сечением, увеличивающимся в направлении потока; г) установленную за диффузором камеру сгорания с поперечным сечением, превышающим поперечное сечение смесителя, и систему подачи топлива, связанную с камерой сгорания; д) установленное за камерой сгорания выходное сопло, имеющее расширяющуюся часть с поперечным сечением, превышающим поперечное сечение камеры сгорания, и снабженное переходным дросселем, расположенным между камерой сгорания и выходным соплом; е) центральный обтекатель, установленный по продольной оси двигателя в камере сгорания и выходном сопле и снабженный установленным на нем устройством управления регулируемым сечением выходного сопла, и ж) узел направляющих лопаток, который содержит направляющую лопатку, установленную с помощью нескольких распорок, прикрепленных к внутренней стенке двигателя, и входящий в диффузор центральный обтекатель, установленный в зоне потока текучей среды внутри диффузора, а система подачи топлива выполнена в виде нижнего по потоку конца направляющей лопатки, в котором образованы несколько топливных сопел, подсоединенных к источнику топлива.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7, Рисунок 8, Рисунок 9, Рисунок 10www.findpatent.ru
 (5)
(5) — давление в полностью заторможенном потоке; po{\displaystyle p_{o}}
— давление в полностью заторможенном потоке; po{\displaystyle p_{o}} — атмосферное давление; Mn{\displaystyle M_{n}}
— атмосферное давление; Mn{\displaystyle M_{n}} — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k}
— полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде), k{\displaystyle k} — показатель адиабаты, для воздуха равный 1,4.
— показатель адиабаты, для воздуха равный 1,4. (3)
(3)
 — сила тяги, v{\displaystyle v}
— сила тяги, v{\displaystyle v} — скорость полёта, ve{\displaystyle v_{e}}
— скорость полёта, ve{\displaystyle v_{e}} — скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}}
— скорость реактивной струи относительно двигателя, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — секундный расход горючего.
— секундный расход горючего.  ,
, — плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}}
— плотность воздуха (зависит от высоты), dVdt{\displaystyle {\frac {dV}{dt}}} — объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S}
— объём воздуха, который поступает в воздухозаборник ПВРД за единицу времени, S{\displaystyle S} — площадь сечения входа воздухозаборника, v{\displaystyle v}
— площадь сечения входа воздухозаборника, v{\displaystyle v} ,
, — секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}}
— секундный расход воздуха, dmfdt{\displaystyle {\frac {dm_{f}}{dt}}} — стехиометрический коэффициент смеси горючего и воздуха.
— стехиометрический коэффициент смеси горючего и воздуха.