





В огромном выборе драйверов шаговых двигателей, что есть сейчас на рынке, несложно запутаться. Тем более, когда продавцы стараются написать побольше текста и страшных слов в описание продукта. Тем начинающим конструкторам, кого длинные списки с перечислением "расширенных функций" и всяких опций сбивают с толку при принятии решения, призвана помочь данная статья. Здесь описаны наиболее часто встречающиеся опции, а также дана субъективная оценка реальной нужности такой функции(или отсутствия таковой).
Начнем с самых распространенных:
Сейчас сложно встретить драйвер, в котором входы не изолированны гальванически от остальной части, и производители упоминают об оптоизоляции больше для проформы. Драйвер - устройство силовое, на входе у него маломощные сигналы, как правило 0..5 В, и током не более 50-100 мА, тогда как в драйвере коммутируются напряжения на порядок больше, иногда до 100-200 В, и токи бывают немалые - до 5-8А. В случае отсутствия оптопар на входе, при пробое силовой части эта энергия может устремиться в виде тока обратно по входным проводам, и повредить контроллер и подключенные к нему устройства. Поэтому защитная опторазвязка - строго обязательная часть любого нормального драйвера. Все драйверы Purelogic имеют оптоизолированные входы управления (опторазвязку).
Микрошаговый режим сам по себе, несомненно, полезная функция. Вопрос в том, можно ли использовать максимальное деление шага как аргумент при выборе драйвера. Иногда кажется, что производители соревнуются, кто больше делений шага сможет зашить в устройство. Многие фирмы предлагают драйверы, позволяющие делить шаг на 512 микрошагов. Для того, чтобы в таком режиме вращать вал со скоростью 20 об/сек(а это вполне нормальная скорость для качественных двигателя и драйвера), потребуется подавать импульсы STEP с частотой 512*200*20 = 2 Мгц. Тогда как сам драйвер обычно способен отрабатывать импульсы на частоте не более 200-300 кГц. Соответственно, если Вы используете деление шага 1/512 то быстрее чем 2 об/сек двигатель раскрутить не удастся - это в том случае, если Ваш контроллер может выдавать импульсы с частотой 300 кГц. Многие контроллеры ограничены частотой 100-150 кГц, и менее. Следовательно, в реальных задачах имеет смысл использовать микрошаг порядка 1/32 или 1/64, бОльшие деления - удел очень узкоспециальных применений. Мы рекомендуем не смотреть на максимальное деление шага при выборе драйвера, но желательно, чтобы драйвер позволял работать в диапазонах деления шага 1/2 - 1/64. Компания Purelogic выпускает одноканальные и многоканальные драйверы ШД с диапазоном деления шага от 2 до 64.
Она же функция компенсации резонанса, она же функция устранения среднечастотной нестабильности. Шаговые двигатели подвержены резонансу - такова их конструктивная особенность. Чем сильнее резонирует вал двигателя, тем меньший крутящий момент двигатель отдает. В 80% случаях прохождения частоты резонанса - вал останавливается. Функция подавления резонанса - помогает уменьшить негативный эффект резонанса. Этой функцией оснащены на самом деле очень мало драйверов шаговых двигателей, самые известные примеры - это драйверы Purelogic, Geckodrive и Leadshine серий DM, EM. Технологии, которые используют производители, не раскрываются, но примерно известно, что возникновение резонанса отслеживается по колебаниям ЭДС индукции, возникающим в обмотках двигателя от резонирующего ротора, после чего ПО драйвера определяет стратегию его устранения. Функция подавления резонанса достаточно полезна, и польза её растет вместе с нагрузкой на двигатель и его размером - если для двигателей 42 и 57 мм это не так существенно, то работать с 86 двигателями без такой функции уже может быть неприемлемо. Следует упомянуть, что алгоритмы подавления резонанса в блоках управления Purelogic и Geckodrive - автоматические, не требуют настройки и подобраны под конкретные типоразмеры двигателей во всем диапазоне частот. Именно поэтому Purelogic выпускают драйверы под конкретные типоразмеры ШД - PLD330 для PL42 (NEMA17), PLD440/PLD545/PLD57 для PL57 (NEMA23), PLD880/PLD86 для PL86 (NEMA34) и PLD8220 для PL110 (NEMA43). В драйверах Leadshine понадобится ручная настройка драйвера - подбор частот устранения резонанса (на выбор 3 диапазона частот) что делает эти драйверы более сложными и менее гибкими в настройке.
Функция, впервые появившаяся в драйверах Geckodrive. В полном шаге каждая обмотка постоянно запитана полным током, а при использовании микрошагового режима - меняются по синусоидальным законам, со смещением фазы в 90 градусов. Это значит, что в режиме полного шага на ротор действует сила, складывающаяся из сил магнитного притяжения обеих обмоток статора, причем - обе этих силы максимальны(запитка полным током). В случае микрошага - две обмотки могут быть запитаны полным током только в тот момент, когда ротор проходит положение полного шага. Следовательно, момент в микрошаговом режиме - меньше чем в полу- или полношаговом. При быстром вращении, однако, можно объединять много микрошагов в один шаг - в самом деле, ротор имеет инерцию, и ни мгновенно разогнаться, ни мгновенно остановиться не может, а значит, скорость меняется плавно, и можно объединять микрошаги в полный шаг без существенной потери точности - а значит, запитывать обмотки полным током, и получать больший момент на высоких оборотах. Функция плавного перехода с микрошагового управления(синусоидальных токов) к полношаговому(запитке фаз полным током) и называется морфингом. Таково теоретическое обоснование данной функции. Драйверы Purelogic поддерживают технологию морфинга.
При подаче питания на блоки управления, ток в обмотки подается обычно просто - полным напряжением и затем отсечка по достижению нужного значения тока. Поскольку до подачи тока ротор находится неизвестно где, то в момент подачи он приходит в положение равновесия рывком - это слышно при включении питания, раздается характерный "удар". При плавном пуске напряжение питания возрастает постепенно, и вал двигателя подтягивается тоже постепенно, без удара. В целом, это благотворно сказывается на механике. Все драйверы Purelogic имеют функцию плавного запуска ШД.
При простое (отсутствии управляющих сигналов) драйвер может снижать ток в обмотках до установленного значения. Это позволяет уменьшить нагрев шагового двигателя и экономить энергию. Все драйверы Purelogic имеют функцию AUTO-SLEEP - снижение тока в обмотках ШД при простое.
purelogic.ru
Предлагаем Вашему вниманию драйверы для шаговых двигателей от ведущего мирового разработчика и производителя устройств управления двигателями - компании Geckodrive Inc. (США).
Основной модельный ряд нового поколения представлен четырьмя драйверами: G201X, G210X, G203V и G213V. Все данные драйверы предназначен для управления биполярными шаговыми двигателями с максимальным рабочим током фазы до 7 Ампер при напряжении питания до 80 Вольт. Технические характеристики драйверов представлены в таблице.
| Входной ток управляющих сигналов STEP и DIR | от 3 мА | |||
| Максимальная входная частота импульсов STEP | 300 кГц | 333 кГц | ||
| Встроенные функции защиты драйвера и ШД | Нет | КЗ, переполюсовка и превышение напряжения питания, перегрев | ||
| Габаритные размеры | 64 х 64 х 22 мм | |||
| Вес | 100 г | |||
Основными функциональными преимуществами драйверов Geckodrive является:
Также следует отметить, что при всем этом функциональном разнообразии драйверы имеют миниатюрные габариты и малый вес (100 г).
Аппаратная функция компенсации среднечастотного резонанса и подавления низкочастотных вибраций является главным ноу-хау компании Geckodrive, и на сегодняшний день драйверы Geckodrive являются единственными в мире драйверами шаговых двигателей без обратной связи по положению ротора, в которых полноценно реализована эта функция.
В комплексе с микрошаговым управлением данная функция обеспечивает качественное и плавное вращение ротора шагового двигателя в широком диапазоне рабочих частот - от единиц Гц до десятков кГц, тем самым позволяя добиться от двигателя превосходной динамики и высоких скоростей вращения. Таким образом, проблемы, связанные с пропуском шагов на низких частотах и срывом вращения на средних частотах, больше не актуальны для пользователей драйверов Geckodrive.
Другим преимуществом драйверов Geckodrive является функция «морфинга» – плавного изменения формы тока в фазах шагового двигателя в зависимости от частоты вращения ротора. С увеличением скорости, драйвер плавно переходит из микрошагового режима с синусоидальной формой тока в фазах шагового двигателя к полношаговому режиму с прямоугольной формой тока. Следует отметить, что несмотря на изменение режима управления, драйвер точно осуществляет позиционирование ротора двигателя и никаких «проскоков» шагов не возникает.
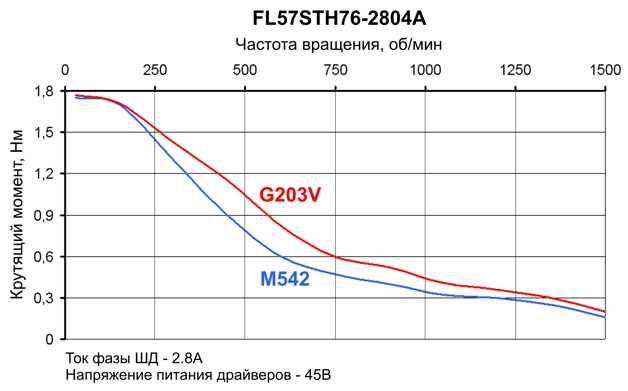
Известно, что микрошаговый режим отлично подходит для низких скоростей вращения шаговых двигателей, но с увеличением скорости двигатель в данном режиме не может обеспечить достаточный крутящий момент, что приводит к срыву вращения. Использование функции «морфинга» позволяет увеличить крутящий момент шагового двигателя на средних и высоких скоростях до 30%.
В качестве примера приведены нагрузочные характеристики двигателя FL57STH76-2804A полученные при работе с драйверами Geckodrive G203V и Leadshine M542 (Китай). Как видно из графика, крутящий момент у двигателя под управлением G203V благодаря функции «морфинга» значительно увеличился в диапазоне скоростей вращения от 300 до 1500 об/мин. А именно этот диапазон скоростей и является основным для шаговых двигателей.
Во всех драйверах Geckodrive используется функция адаптивной рециркуляции тока в обмотках шагового двигателя, которая позволяет без потери выходного крутящего момента на валу двигателя уменьшить нагрев его корпуса как при вращении, так и в статическом режиме. Кроме того, благодаря данной функции корпус самого драйвера при работе на токах до 4 Ампер не нагревается больше чем на 40°, и, соответственно, не требует принудительного охлаждения.
В дополнение к данной функции в драйверах реализован режим автоматического уменьшения рабочего тока в обмотках шагового двигателя при простое. Данный режим дополнительно уменьшает нагрев как самого двигателя, так и драйвера, и позволяет значительно сократить потребляемую приводом мощность в статическом состоянии.
Управление драйверами стандартное для устройств данного класса и осуществляется двумя логическими сигналами «ШАГ» (STEP) и «НАПРАВЛЕНИЕ» (DIR). Каждый импульс на входе STEP вызывает поворот ротора двигателя на один шаг или микрошаг в зависимости от выбранного режима работы в сторону, заданную уровнем сигнала на входе DIR.
Минимальный входной ток управляющих сигналов составляет всего 3 мА, что позволяет использовать для управления драйверами маломощные источники сигналов с выходным напряжением от 3.3 Вольт, а также подключать драйвер напрямую к LPT-порту компьютера без использования дополнительных буферных цепей.
Инженеры компании Geckodrive не останавливаются на достигнутом, и в настоящее время ведется активная работа по созданию контроллера шагового двигателя нового поколения с управлением через интерфейс RS-485, а также шагового сервопривода.
Компания НПО "АТОМ" является официальным дистрибьютором Geckodrive Inc. на территории России. Мы всегда поддерживаем на складе все основные модели драйверов шаговых двигателей и готовы оказать полную техническую поддержку и консультации по использованию продукции Geckodrive.
www.npoatom.ru
Выбор драйверов шаговых двигателей, представленный на современном рынке, колоссален: достаточно заглянуть в каталог Степмотор, чтобы убедиться в этом. Поэтому определиться с выбором конкретной модели подчас бывает очень непросто. Тем более что, помимо основных характеристик, в описаниях можно найти довольно длинный список дополнительных функций. Чтобы облегчить жизнь пользователям такого рода устройств, особенно – начинающим, разберёмся, что из себя представляют наиболее часто встречающиеся расширенные функции драйверов для ШД.
На самом деле, наличие гальванической изоляции входов от остальной части драйвера не является функцией, скорее, конструктивной особенностью. На входе драйвера напряжение и значение тока незначительны, тогда как внутри устройства эти значения увеличиваются в несколько раз. Отсутствие оптоизоляции на входе может привести к тому, что скоммутированная внутри драйвера энергия, при пробое силовой части, устремится обратно по проводам в виде тока, что практически неизбежно приведёт к выходу из строя как самого контроллера, так и подключённых к нему устройств. Поэтому наличие оптоизоляции является очень важным моментом, на который обязательно нужно обратить внимание при выборе драйвера ШД.
Несомненно, функция микрошага является важным параметром драйвера, однако, выбирая устройство для своих целей, нужно учитывать, что указанное максимальное деление должно быть сопоставимо с частотой входных импульсов агрегата. Сегодня многие производители указывают очень высокие значения микрошага, тогда как для реальных задач в абсолютном большинстве случаев достаточно значения 1/64. Большие значения требуют большей частоты, тогда как нормальная отработка импульсов драйвером обычно осуществляется на частоте не более 300 кГц.
Не секрет, что конструктивные особенности шаговых двигателей делают их подверженными резонансу, при этом, сильный резонанс часто становится причиной снижения крутящего момента, а иногда и вовсе приводит к остановкам двигателя. Функция подавления резонанса позволяет свести негативные последствия к минимуму, причём польза её тем более ощутима, чем большая нагрузка приходится на двигатель. На сегодняшний день данной функцией оснащаются драйвера Geckodrive, Purelogic , Yako и Leadshine. Первые три производителя предлагают автоматические алгоритмы функции, применимые для определённых размеров электродвигателей, последний даёт возможность индивидуальной настройки функции.
Морфинг представляет собой дополнительную функцию драйверов Geckodrive, с помощью которой осуществляется плавный переход с микрошагового режима, основанного на воздействии синусоидальных токов в полношаговый режим, при котором фазы запитываются полным током. Теоретически данная функция должна способствовать увеличению крутящего момента, однако на практике эффективность её пока не доказана. Поэтому опираться на наличие функции морфинга, как на основополагающий фактор при выборе драйвера ШД, не стоит.
Функция плавного пуска в последнее время присутствует практически во всех драйверах ШД и основывается на постепенном возрастании напряжении питания, благодаря чему вал двигателя запускается плавно, без характерного удара. В долгосрочной перспективе данная функция, несомненно, позволяет значительно продлить жизнь оборудования, но при частоте запусков, в среднем, составляющей 2-3 раза за день, а чаще всего один, ощутить реальные преимущества от её использования едва ли удастся.
stepmotor.ru










