





Опубликовано: 12 марта 2014 г. в 15:45, 735
Активные и реактивные токи в электродвигателе переменного тока. Концепция компенсации реактивной мощности с использованием векторного анализа.
Компенсация реактивной мощности необходима для любых индуктивных (и емкостных) нагрузок с токами, синусоида которых смещена относительно синусоиды напряжения на углы до π радиан(или до 180°), а в основе коррекции коэффициента мощности лежит принцип компенсации реактивных токов, который наиболее легко понять на примере физических (электрических) процессов, протекающих в электродвигателях переменного тока.
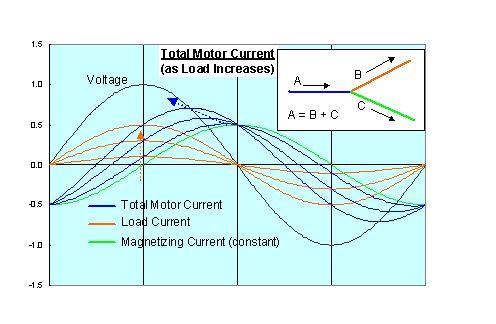
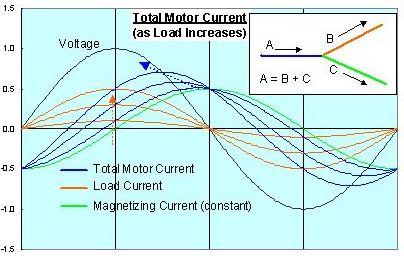
Работа электродвигателя переменного тока невозможна без превентивного создания магнитных полей обмоток ротора и статора, взаимодействие между которыми заставляет вал вращаться. На создание этих полей идет ток намагничивания (MagnetizingCurrent на рис. ниже), а работу двигателя с нагрузкой обеспечивает ток нагрузки (LoadCurren на рис. ниже), которые условно можно представить, как две логические цепи (линии) ветвления подаваемого на электродвигатель тока (TotalMotorCurrent на рис. ниже).
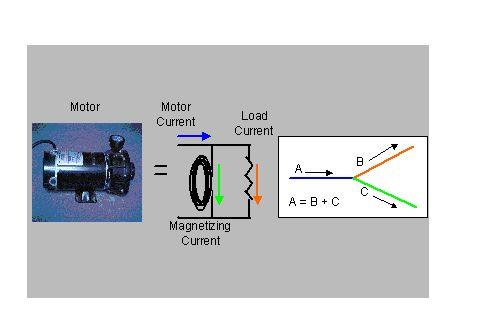
Важно: Ветвление подаваемого тока представляет логические, а не физические связи в электродвигателе — это не физическое деление цепи, а условная логическая схема для понимания концепции реактивных и активных токов.
Если условно принять, что на холостом ходу вал двигателя вращается без каких-либо потерь энергии на трение, нагрев подвижных частей, нагрев обмотки и пр., то ток намагничивания (MagnetizingCurrent) остается постоянной величиной, зависит только от конструктивных особенностей двигателя и «опаздывает» по отношению к сетевому напряжению на π радиан или 180° — синусоида тока намагничивания смещена относительно синусоиды напряжения на π радиан или 180° вправо.
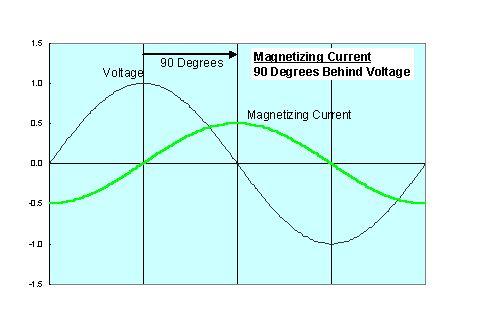
Кроме того, ток намагничивания условно не связан с присоединяемыми к двигателю нагрузками и по сути не использует энергию – потребляемая в первой половине периода на создание магнитного поля энергия возвращается в сеть во втором полупериоде.
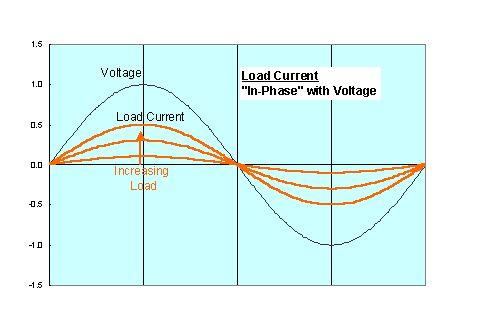
При подключении нагрузки (исполнительного механизма, компрессора и пр.) электродвигатель начинает потреблять из силовой сети ток нагрузки в объемах, пропорциональных силе сопротивления вращению двигателя. Причем ток нагрузки синфазен сетевому напряжению — увеличивается и уменьшается соответственно нагрузке, но в фазе с напряжением.
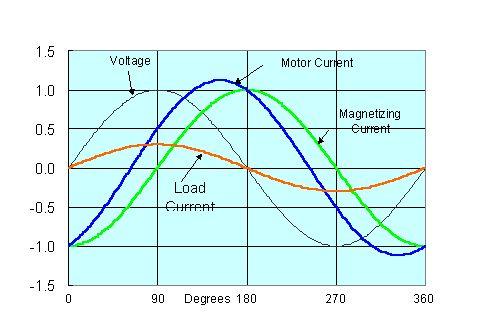
Поскольку синусоида тока намагничивания смещена относительно синусоиды напряжения на π радиан или 180° вправо, то результирующая синусоида тока намагничивания и синфазного с напряжением тока нагрузки смещена относительно синусоиды напряжения на угол в пределах от 0 до 90° вправо (опаздывает).При (условно) равных токах намагничивания и нагрузки результирующая синусоида тока двигателя смещена относительно синусоиды напряжения на 45° вправо (рис. ниже слева), при уменьшении тока нагрузки в сравнении с током намагничивания результирующая кривая тока все больше смещается к синусоиде тока намагничивания (рис. ниже справа).
Важно: Коэффициент мощности — косинус угла смещения результирующей синусоиды тока от синусоиды напряжения, а это по факту показывает для краевых условий, что при нулевом смещении (cos 0 = 1) весь получаемый двигателем ток используется для передачи энергии нагрузке (активный ток и активная мощность), а при максимальном смещении в 90° (cos90° = 0) весь получаемый двигателем ток тратится на намагничивание и не делает полезной работы (реактивный ток, реактивная мощность).
Исходя из элементарной логики понятно, что чем меньше реактивного тока будет использоваться на намагничивание и чем больше активного тока – на передачу энергии нагрузке, то тем меньше будет смещенарезультирующая синусоида тока от синусоиды напряжения, тем больше будет коэффициент мощности (косинус угла смещения) и тем эффективнее будет использоваться двигателем потребляемая энергия. Вместе с тем, мощность электродвигателя зависит от сил создаваемых обмотками магнитных полей, что наряду с сопутствующими энергетическими потерями на трение, нагрев и пр. определяет достаточно высокие токи намагничивания (реактивные токи), тем большие, чем больше мощность двигателя и несовершенней его конструкция в плане энергосбережения.
С другой стороны, потребление из силовой сети больших объемов реактивных токов, необходимых для намагничивания, но не выполняющих полезную работу, снижает долю активных токов (активной мощности) или повышает нагрузку на токоподводящие линии с соответствующими негативными последствиями – падение напряжения из-за повышения электросопротивления проводов, нагрев проводки и силовых трансформаторов и т.д. Поэтому предельно необходимыми становятся мероприятия по компенсации реактивных токов (реактивной мощности), как можно ближе к электрической нагрузке.
Важно: Деление тока на активный и реактивный или мощности на активную и реактивную чисто условно — через силовую сеть подается один переменный ток (и одна мощность), который в нагрузке используется для выполнения полезной работы или же формирования условий для работы электрооборудования (намагничивания обмоток двигателя, трансформатора, генератора и т.д.), по сути, необходимых, но приносящих косвенную пользу. Т.е. реактивная мощность (или реактивные токи) для любой индуктивной нагрузки является неизбежным «злом», без которого невозможна работа, причем «мнимая» реактивная мощность в действительности становится мнимой при технически грамотных мероприятиях по компенсации реактивной мощности (см. подробнее о компенсации реактивной мощности установками КРМ, УКРМ).
Концепция компенсации реактивной мощности с использованием векторного анализа.
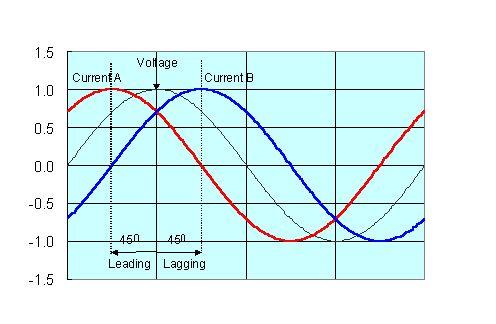
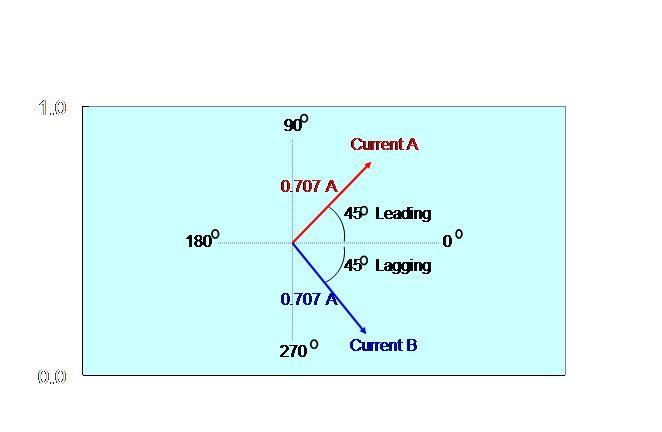
Если рассмотреть случай сети переменного напряжения с двумя токами, один из которых (А на рис. ниже) опережает напряжение на 45°, а другой (В на рис. ниже) отстает от напряжения на 45°, то в векторном выражении вектор длины действующего (среднеквадратического) значения силы тока А = 0.707 Im будет направлен вверх и вправо относительно центра координат, а вектор длины действующего (среднеквадратического) значения силы тока В= 0.707 Im будет направлен вниз и влево относительно центра координат.
Результирующий ток рассматриваемого выше электродвигателя будет складываться из тока намагничивания и тока нагрузки (действующие или среднеквадратические значения), а угол между векторами результирующей тока и тока нагрузки определяет угол смещения результирующей синусоиды токов относительно синусоиды напряжения.
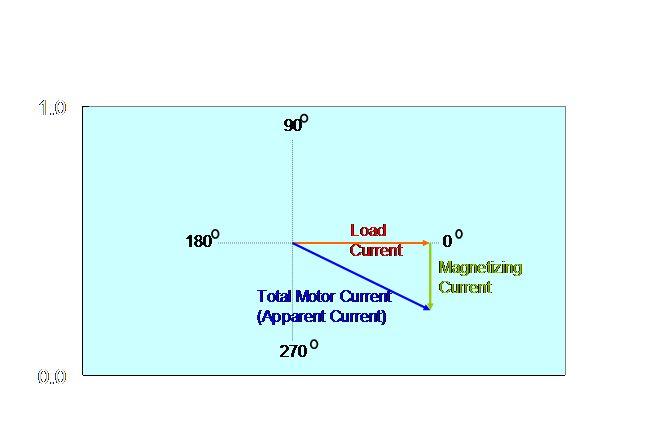
По аналогии индуктивная нагрузка, потребляющая ток намагничивания с опаздыванием от напряжения на 90°, на графике будет представлена вектором, направленным вниз из центра координат, синфазные с напряжением токи нагрузки — вправо от центра координат, а опережающая напряжение по току на 90° емкостная нагрузка (CapacitiveCurrent) — вверх от центра координат.
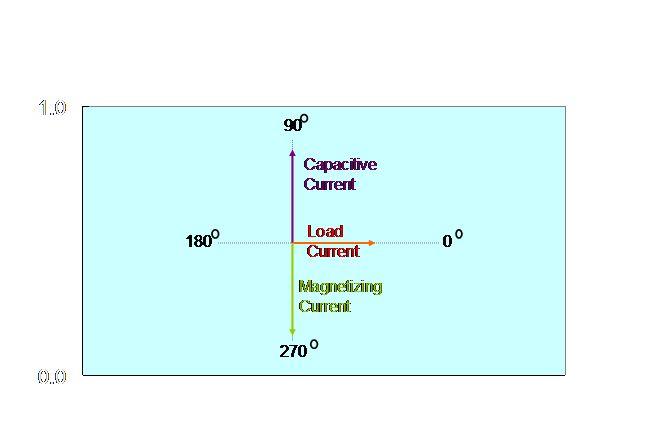
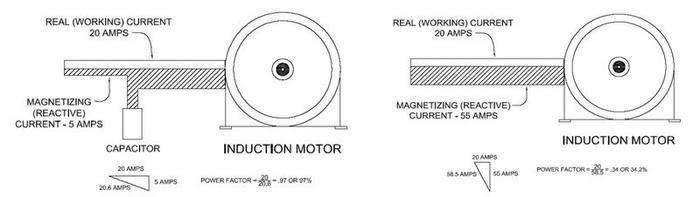
Т.е. если в цепи электродвигателя одновременно использовать емкостную нагрузку (конденсаторы) с током, опережающим напряжение на 90°, а значит и ток намагничивания на 180° и равным по мгновенным значениям току намагничивания, то эти нагрузки будут компенсировать (или дополнять) друг друга во время работы двигателя. Т.е. в полупериод потребности обмоток в намагничивании конденсаторный блок будет отдавать ток в цепь, а при разрушении магнитного поля в следующий полупериод — аккумулировать образуемую энергию в виде накапливаемого реактивного тока.
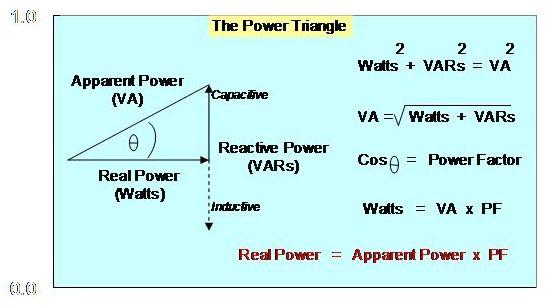
Если перейти от токов к мощности, то активная мощность RealPower (Вт, кВт, МВт) это произведение активного тока (или тока нагрузки) на напряжение, реактивная мощность ReactivePower(VAR, ВАр, кВАр, МВАр) — произведение реактивного тока (или тока намагничивания) на напряжение, полная мощностьApparentPower(вольт-ампер, ВА, кВА, МВА) — корень из суммы квадратов активной и реактивной мощностей (из теоремы Пифагора согласно векторной диаграмме), а коэффициент мощности — косинус угла между полной мощностью и активной мощностью.
Подготовлено компанией «Нюкон»
www.elec.ru
Cтраница 2
Анализ уравнения электрического состояния фазы статора (14.116) показывает, что при постоянном напряжении t / x между выводами фазной обмотки статора и / х g / 1ном магнитный поток вращающегося поля машины Фв также постоянен и не. Это означает, что энергия, запасаемая в магнитном поле асинхронного двигателя, и реактивная мощность двигателя также постоянны и не зависят от ее нагрузки. Но так как с увеличением нагрузки активная мощность двигателя увеличивается, то из (14.21) следует, что с увеличением нагрузки коэффициент мощности двигателя увеличивается. [16]
Фв также постоянен и не зависит от ее нагрузки. Это означает, что энергия, запасаемая в магнитном поле асинхронного двигателя, и реактивная мощность двигателя также постоянны и не зависят от его нагрузки. Но так как с ростом нагрузки активная мощность двигателя увеличивается, то из (14.21) следует, что с ростом нагрузки и коэффициент мощности двигателя увеличивается. [17]
Анализ уравнения электрического состояния фазы статора (14.116) показывает, что при постоянном значении напряжения Ut между выводами фазной обмотки статора и тока / 2 1ном магнитный поток вращающегося поля двигателя Ф также постоянен и не зависит от ее нагрузки. Это означает, что энергия, запасаемая в магнитном поле асинхронного двигателя, и реактивная мощность двигателя также постоянны и не зависят от его нагрузки. Но так как с ростом нагрузки активная мощность двигателя увеличивается, то из (14.21) следует, что с ростом нагрузки и коэффициент мощности двигателя увеличивается. [18]
Большое влияние на коэффициент мощности электродвигателей оказывает их загрузка. Это объясняется тем, что мощность холостого хода асинхронных электродвигателей составляет 60 - 70 % реактивной мощности двигателя при номинальной его нагрузке. [20]
Однако в действительности магнитное сопротивление асинхронного двигателя или трансформатора не остается неизменным, а зависит от напряжения. Анализ экспериментальных данных показывает, что при сравнительно высоких расчетных магнитных индукциях у современных электрических машин увеличение реактивной мощности асинхрюнного двигателя или трансформатора при повышении напряжения в питательной сети растет быстрее, чем это соответствовало бы квадрату отношения напряжений или магнитных индукций, что объясняется уменьшением магнитной проницаемости ц при увеличении напряжения вследствие насыщения магнитной цепи. [21]
Чем выше номинальный коэффициент мощности, тем относительно меньше реактивная мощность холостого хода двигателя. Однако и у современных асинхронных двигателей, имеющих сравнительно высокий номинальный коэффициент мощности, удельный вес реактивной мощности холостого хода весьма значителен; например, у асинхронных двигателей единой серии общего применения типов А и АО реактивная мощность холостого хода колеблется в пределах 60 - 85 % реактивной мощности двигателя при 100-процентной нагрузке. [22]
Они являются эффективным средством повышения коэффициента мощности нагрузки. Развиваемая ими реактивная мощность определяется параметрами и режимом работы двигателей и сети. За расчетную следует принимать номинальную реактивную мощность двигателя при опережающем токе. [24]
Реактивная мощность Qi характеризует обратимый процесс обмена энергией между магнитным полем двигателя и источником. Так как необходимость магнитного поля обусловлена принципом действия асинхронного двигателя, то неизбежно наличие реактивной мощности двигателя. [25]
Реактивная мощность Qi характеризует обратимый процесс обмена энергией между магнитным полем двигателя и источником. Так как необходимость магнитного поля обусловлена принципом действия асинхронного двигателя, то неизбежно наличие реактивной мощности двигателя. [26]
На рис. 3.33 приведены графики характеристик реактивной и активной мощностей, рассчитанные для разных двигателей. Реактивная мощность, потребляемая системой электропривода, как видно на рис. 3.33, существенно больше реактивной мощности двигателя. [28]
В первую очередь должны снабжаться устройствами автоматического регулирования возбуждения СД, являющиеся на промышленных предприятиях значительными источниками реактивной мощности. Все СД напряжением выше 1 кВ оснащаются тиристорными системами возбуждения типа ТЕ8, ВТЕ и др. Тиристорные возбудители позволяют реализовать практически любые требования к регулированию возбуждения СД. Требование к регулированию указывает на характер изменения возбуждения в зависимости от возмущений, а закон определяет работу аппаратуры, обеспечивающей заданный характер изменения тока возбуждения. Например, по показателю минимума потерь мощности в электродвигателе выдвигается требование стабилизации реактивной мощности двигателя при изменении нагрузки на его валу. С этой целью могут быть применены законы регулирования по реактивному току, по активному току, углу ф, внутреннему углу машины 0, компаундирование по значению тока и фазовое компаундирование. [29]
Страницы: 1 2
www.ngpedia.ru
Реактивный двигатель — двигатель, создающий необходимую для движения силу тяги посредством преобразования внутренней энергии топлива в кинетическую энергию реактивной струи рабочего тела.
Рабочее тело с большой скоростью истекает из двигателя, и, в соответствии с законом сохранения импульса, образуется реактивная сила, толкающая двигатель в противоположном направлении. Для разгона рабочего тела может использоваться как расширение газа, нагретого тем или иным способом до высокой температуры (т. н. тепловые реактивные двигатели), так и другие физические принципы, например, ускорение заряженных частиц в электростатическом поле (см. ионный двигатель).
Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами. По этой причине чаще всего он используется для приведения в движение самолётов, ракет и космических аппаратов.
Существует два основных класса реактивных двигателей:
Любой реактивный двигатель должен иметь, по крайней мере, две составные части:
Основным техническим параметром, характеризующим реактивный двигатель, является тяга (иначе — сила тяги) — усилие, которое развивает двигатель в направлении движения аппарата.
Ракетные двигатели помимо тяги характеризуются удельным импульсом, являющимся показателем степени совершенства или качества двигателя. Этот показатель является также мерой экономичности двигателя. В приведённой ниже диаграмме в графической форме представлены верхние значения этого показателя для разных типов реактивных двигателей, в зависимости от скорости полёта, выраженной в форме числа Маха, что позволяет видеть область применимости каждого типа двигателей.
ПуВРД — Пульсирующий воздушно-реактивный двигатель, ТРД — Турбореактивный двигатель, ПВРД — Прямоточный воздушно-реактивный двигатель, ГПВРД — Гиперзвуковой прямоточный воздушно-реактивный двигатель
Реактивный двигатель был изобретен Гансом фон Охайном (Dr. Hans von Ohain), выдающимся немецким инженером-конструктором и Фрэнком Уиттлом (Sir Frank Whittle).Первый патент на работающий газотурбинный двигатель был получен в 1930 году Фрэнком Уиттлом. Однако первую рабочую модель собрал именно Охайн.
2 августа 1939 года в Германии в небо поднялся первый реактивный самолёт — Хейнкель He 178, оснащённый двигателем HeS 3, разработанный Охайном.
ru.wikibedia.ru
Реактивный двигатель — двигатель, создающий необходимую для движения силу тяги посредством преобразования внутренней энергии топлива в кинетическую энергию реактивной струи рабочего тела.
Рабочее тело с большой скоростью истекает из двигателя, и, в соответствии с законом сохранения импульса, образуется реактивная сила, толкающая двигатель в противоположном направлении. Для разгона рабочего тела может использоваться как расширение газа, нагретого тем или иным способом до высокой температуры (т. н. тепловые реактивные двигатели), так и другие физические принципы, например, ускорение заряженных частиц в электростатическом поле (см. ионный двигатель).
Реактивный двигатель сочетает в себе собственно двигатель с движителем, то есть он создаёт тяговое усилие только за счёт взаимодействия с рабочим телом, без опоры или контакта с другими телами. По этой причине чаще всего он используется для приведения в движение самолётов, ракет и космических аппаратов.
Существует два основных класса реактивных двигателей:
Любой реактивный двигатель должен иметь, по крайней мере, две составные части:
Основным техническим параметром, характеризующим реактивный двигатель, является тяга (иначе — сила тяги) — усилие, которое развивает двигатель в направлении движения аппарата.
Ракетные двигатели помимо тяги характеризуются удельным импульсом, являющимся показателем степени совершенства или качества двигателя. Этот показатель является также мерой экономичности двигателя. В приведённой ниже диаграмме в графической форме представлены верхние значения этого показателя для разных типов реактивных двигателей, в зависимости от скорости полёта, выраженной в форме числа Маха, что позволяет видеть область применимости каждого типа двигателей.
ПуВРД — Пульсирующий воздушно-реактивный двигатель, ТРД — Турбореактивный двигатель, ПВРД — Прямоточный воздушно-реактивный двигатель, ГПВРД — Гиперзвуковой прямоточный воздушно-реактивный двигатель
http-wikipediya.ru
Реактивная мощность представляет собой часть полной мощности, которая не производит работы, но необходима для создания электромагнитных полей в сердечниках магнитопроводов. Ее величина определяется конструктивными особенностями двигателей (оборудования), их режимами работы и характеризуется коэффициентом мощности – PF. В отечественной практике показателем реактивной мощности является значение cos (φ) и требования к нему находится в пределах 0,75 - 0,85 для нормального режима работы асинхронных двигателей, самого распространенного вида электрических машин в современной промышленности. Режимы работы электрических сетей предприятий могут значительно отличаться от этих значений. В таких случаях соотношение активных и реактивных мощностей могут измениться в худшую сторону, т.е. потребление реактивной мощности от поставщиков электроэнергии может увеличиться. Это приводит к дополнительным потерям в проводниках, вследствие увеличения тока, отклонения напряжения сети от номинального значения. В результате таких изменений параметров сети ухудшаются режимы работы как технологического (основного), так и энергетического (вспомогательного) оборудования – трансформаторов подстанций, кабелей (ускоренное старение изоляции).
Представим себе асинхронный электромотор, который работает на холостом ходу, едва не входя в синхронизм. В этом случае обмотка возбуждения имеет максимальную реактивную мощность, так как в короткозамкнутых витках ротора (беличьей клетке) практически не наводятся вихревые токи. С точки зрения источника питания эта конструкция представляет собой огромную индуктивную катушку с сотнями метров провода. На неё подается напряжение, которое не в состоянии создать электрический ток в таком количестве проводов, он, в свою очередь, и должен производить работу. В результате напряжение есть, а тока почти нет. Но этому двигателю и не нужно много энергии он работает вхолостую, преодолевая только сопротивление подшипников и вязкость воздуха. В данном случае нет синхронного воздействия на потребителя тока и напряжения.
На рисунке 1 изображен треугольник мощностей. P – активная мощность, Q – реактивная мощность, S – полная мощность, φ – сдвиг фаз между током и напряжением. Из треугольника мощностей видно, что при компенсации реактивной мощности будет снижаться и полная мощность потребляемая из сети.
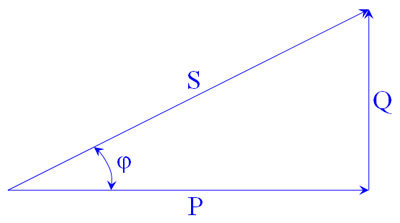 Рисунок 1.
Рисунок 1. 
Конденсаторная установка для компенсации реактивной мощности
Как осуществляется компенсация реактивной мощности. Параллельно индуктивной нагрузке устанавливается емкостная. Напряжение не в силах быстро протолкнуть электрический ток через сотни метров проводов в статоре мотора. Но ток не будет из-за этого отставать от напряжения, он будет в это время заполнять (заряжать) батарею конденсаторов, включенную параллельно с мотором. И источник энергии не почувствует препятствия для протекания тока. Ток и напряжение для источника энергии будут работать синфазно.
Поэтому для разгрузки электрических сетей промышленных предприятий необходима компенсация реактивной мощности, т. е. оборудование, потребляющее реактивную мощность, должно быть оснащено соответствующими установками. Подключение установок компенсации реактивной мощности (КРМ, УКРМ) должно осуществляться как можно ближе к оборудованию потребителей с целью уменьшения влияния реактивных токов на силовые линии связи (кабельные и воздушные).
www.matic.ru
Мощность реактивного двигателя [c.566]
Полная мощность Реактивная мощность [c.24]
Одна из основных проблем маневренности АЭС состоит в преодолении ксенонового отравления реактора при его быстрой разгрузке. При быстром снижении мощности, связанном с уменьшением нейтронного потока, уменьшается выгорание Хе, а его образование в результате радиоактивного распада образовавшегося еще в период работы реактора на большой мощности, остается на прежнем уровне. Вследствие этого в активной зоне реактора происходит избыточное накопление ядер являющихся сильным поглотителем нейтронов. В результате этого через несколько часов после снижения мощности реактивность реактора становится отрицательной и, если не принять специальных мер, количество нейтронов каждого последующего поколения будет уменьшаться, что приведет к остановке реактора. Необходимая для удержания реактора в работе при пониженной нагрузке компенсация отрицательной реактивности производится выдвижением из активной зоны регулировочных стержней, а также быстрым выведением борной [c.153]
Приблизительные значения оптимального к. п. д. в зависимости от мощности реактивной турбины [c.16]
Имея при тех же условиях большие окружную скорость колеса и оборотность и большие расход и мощность, реактивная турбина имеет по (2-8) и большую быстроходность. По этой причине ( 2-7) при меньших напорах она удобнее для применения, чем активная. [c.52]
В связи с развитием техники происходит систематическое увеличение нагрузок в машинах и устройствах. Повышаются требования к проектам, а также к конструкционным материалам, которые косвенным образом влияют на развитие современной технологии в направлении создания металлов и их сплавов со все более высокими прочностными свойствами. Применение таких уникальных установок, как атомные реакторы, турбины большой мощности, реактивные двигатели и новые, энергетические установки, а в металлургической промышленности и в машиностроении интенсификация производства, в значительной мере способствуют повышению заинтересованности к проблеме термической усталости. [c.7]
Для двигателей с номинальным коэффициентом мощности реактивная мощность холостого хода составляет около 60% реактивной мощности при номинальной загрузке двигателя. Для двигателей, у которых os ф = 0,77...0,79, она достигает 70%. [c.51]
Применение ИЕП позволяет весьма эффективно разрешить многие трудности, возникающие при разработке-источников электропитания дугового разряда [2, 3]. Приз создании ИЕП для питания дугового разряда учет ограниченного диапазона изменения нагрузки дает возможность существенно снизить установленные мощности реактивных элементов и всего преобразователя в целом [15]. [c.29]
Поэтому для уменьшения скорости переходных процессов и возможности управления ими резервные ГЦН включают вручную (т. е. ключом управления) на закрытую напорную задвижку или с небольшим первоначальным расходом и затем, постепенно увеличивая расход, следят за изменениями мощности, реактивности, распределения энерговыделения, поддерживая эти параметры в безопасных пределах органами регулирования, и, лишь закончив операции по восстановлению расхода, постепенно восстанавливают мощность. [c.406]
Отсюда мощность реактивных сил трения на боковой поверхности элементарного слоя определится выражением [c.189]
Для операции, изображенной на рис. 170, полезная нагрузка составляет 19% начальной массы корабля на околоземной орбите на двигательную установку (включающую в себя в бортовую электростанцию) приходится 24% ее, а на рабочее тело — 57%. Эти данные соответствуют двигательной установке с довольно большой удельной массой на каждый киловатт выходной мощности реактивной струи приходится 10 кг массы. Если же удельную массу уменьшить вдвое, то доля полезной нагрузки возрастает до 36% за счет рабочего тела, на которое теперь приходится лишь 40% массы корабля [4.25]. [c.461]
ВХОДОМ В атмосферу. Наконец, высказывалось убеждение, что уже в ближайшие годы удельная масса ядерно-электрической установки сможет снизиться до 1 кг на киловатт выходной мощности реактивной струи [4.122], [c.462]
Здесь Н — реактивная сила, которая в отсутствие внешней механической силы является основной действующей силой Ки — мощность реактивной силы. [c.82]
Для реактора, работающего на заметном уровне мощности, реактивность является, вообще говоря, функцией температуры реактора и, следовательно, определяется значением Р ( ) в данный момент и в более ранние моменты времени, т. е. Р ), где I становится линейной и простой для решения. Такой случай важен для понимания [c.378]
Как было сказано выше, в реакторе, работающем на мощности, реактивность является функцией мощности. Следовательно, уравнение кинетики (9.8) представляет собой нелинейное по мощности реактора уравнение. Тем не менее если реактивность реактора, работающего на мощности, подвергается небольшим возмущениям, то можно линеаризовать уравнения точечного реактора. Простые уравнения, которые здесь выводятся, найдут применение в последующих разделах. [c.383]
Интересно, что в этом случае реактивные мощности обоих излучателей находятся в противофазе. Действительно, при умножении объемной скорости на I реактивная.компонента давления также умножается на I, что дает в результате для реактивной мощности умножение на Р = —1. На этом обстоятельстве основан способ устранения реактивной нагрузки присоединенной массы, передающейся на первичный двигатель излучателя. В самом деле, пусть кинематическая схема некоторого низкочастотного ка 1) излучателя включает вал, приводящий своим вращением в движение рабочий элемент излучателя (например, выдвигает поршень). Нагрузка на поршень передается и на вал, в результате чего вал должен передавать как активный, так и реактивный (превышающий активный в отношении 1 ка) момент вращения. Мгновенная мощность мотора должна поэтому значительно превышать активную мощность излучателя. Навесим на вал второй такой же излучатель, сдвинутый по фазе на 90° от первого. Суммарное излучение звука удвоится по мощности. Реактивные же моменты на валу будут взаимно противоположны и, взаимно уничтожаясь, будут только скручивать вал, не передавая нагрузку на мотор, который должен будет развивать только активную мощность. При низких частотах эта мощность мала по сравнению с реактивной мощностью, и такое устройство позволяет резко снизить требуемую мощность мотора. [c.317]
Это означает, что при частоте возмущения 2=(0о средняя мощность (активная мощность) равна максимальному значению переменной мощности (реактивной мощности). Таким образом, при введении в колебательную систему определенной полезной мощности в системе должна развиваться такая реактивная мощность, максимальное значение которой имеет ту же самую величину, что и активная мощность. Если возмущение происходит не с частотой О=(0о, то отношение активной мощности к реактивной уменьшается. Из (5.47) легко получить [c.200]
Громкость шума современного самолета с поршневым двигателем равна примерно 115—120 децибелам, т. е. граничит с шумом, вызывающим боль. Шум самолета с реактивным двигателем в ряде случаев превышает 130 децибел и доходит до 160. При этом надо помнить, что если громкость шума самолета в децибелах только в два раза больше громкости обычного разговора, то сила, с которой шум самолета давит на барабанную перепонку, в сто раз больше силы звука речи. При дальнейшем повышении мощности реактивных двигателей самолет, пролетая на бреющем полете, сможет разрушать здания и поражать людей только силой звука. [c.232]
Важнейшими потребителями электроэнергии являются электрические машины. Кроме активной мощности, которую они затем преобразовывают в механическую, им также необходима и реактивная мощность. Реактивная мощность не потребляется электрическими машинами, она всего лишь берется на время из сети во время одной части периода и в другой части периода возвращается обратно в сеть. Однако прокачивание реактивной мощности через выводы происходит не без потерь. Мелким потребителям предприятия энергоснабжения предоставляют необходимую реактивную мощность бесплатно. Но если реактивная мощность используется широкомасштабно, она должна оплачиваться. Поэтому электрические установки с большим потреблением реактивной мощности (при этом практически всегда речь идет о индуктивной реактивной мощности) должны компенсироваться . Компенсация индуктивной реактивной мощности происходит за счет подключения потребителей емкостной реактивной мощности, то есть конденсаторов. [c.262]
На рис. 45, б изображена регулировочная характеристика источника тока. В зоне изменения углов 0 от О до 30 ЭЛ. град, ток нагрузки практически ие меняется, а при углах регулирования, близких к 180, существует наиболее резкая зависимость. Однако, с ростом диапазона регулирования более 5. -6 происходит чрезмерное увеличение расчетных относительных мощностей реактивных элементов преобразователя. Поэтому для расширения диапазона регулирования до 10..Л2 необходимо [c.172]
И. К- И. Бауман и М. М. Орахелашвили, Регулирование мощности реактивных гидротурбин поворотным носиком спирали, сб. Регулирование гидротурбин малой и средней мощности , Труды ВИГМ , вып. 12, Машгиз, 1950 (6-12). [c.262]
В левой части уравнения (1.4.32) представлена мощность активных (поверхностных и массовых), по отношению к рассматриваемому телу Ма, сил, а в правой - мощность реактивных (инерционных и внугрен-них) сил. Таким образом, (1.4.32) следует рассматривать как баланс мощ-ности всех действующих на тело М , сил. [c.107]
Здесь мощность активных, по отношению к телу М, сил представлена первым и третьим слагаемыми левой части уравнения (1.4.42), а мощность реактивных сил - слагаемыми правой части уравнения. Учитывая, что вектора и всегда нащ>авлены на противоположно фуг гфугу, второе слагаемое в балансе мощности (1.4.42), характеризующее ее рассеяние на межкомпонентной границе, относят к мощности реактивных сил. [c.109]
Первые работы по проблеме оптимизации в задачах механики полета с двигателями ограниченной мощ ности относятся к 1959—1961 гг. (Дж. Ирвинг и Э. Блум, 1959 Г. Л. Гродзовский, Ю. Н. Иванов и В. В. Токарев, 1961). В них учитывались главные особенности характеристик таких двигателей ограниченность мощности реактивной струи и зависимость веса двигателя от максимальной мощности. Был установлен факт разделения исходной задачи на весовую и динамическую части. Выявлены основные свойства оптимальных решений наличие наилучшего распределения стартового веса между двигателем и рабочим веществом, выгодность изменения величины тяги в процессе полета. [c.275]
Напряжение питающей сети, кВ Число фаз питающей сети контурной цепи Рабочее напряжение, В Производительность по плавлению и перегреву до 1400 С (с учетом 25% вспомогательного времени), т/ч Мощность реактивная, установленная, квар Шщая масса электропечи с расплавленным металлом, т [c.208]
ЮО 150 200 300 400 500 Рис. 10.9. Изменение уронни звуковой мощности реактивной струи в зависимости от скорости истечения газа из сопла (угол измерения 75°), полученное на модельном сопле [c.484]
Нейтроны от бериллий-поло ниевого источника или блуждающие нейтроны вызывают деление ядер урана-235. Для того чтобы реак ция могла нарастать, удаляют аварийные стержни и постепенно выводят регулирующие, пока коэффициент размножения не станет боль, ше единицы. Нейтронный поток в реакторе нарастает, тепловыделение увеличивается и температура активной зоны растет. Длина диффузии нейтронов и расстояние, на котором быстрые нейтроны замедляются до тепловой скорости, возрастают, плотность активного вещества убывает, утечка нейтронов растет, реактивность уменьшается. Таким образом, процесс нарастания мощности является до некоторой степени саморегулирующимся. Чем больше выдвинуты регулирующие стержни, тем при большем нейтронном потоке, а следовательно, при большей тепловой мощности реактивность реактора падает до нуля. [c.364]
Трехфазный иидуктивно-емкостный преобразователь 0,9 А О,..500 В (рис. 44). Трехфазная питающая сеть позволяет создать источники питания на базе индуктивно-емкостных преобразователей с существенно лучшими массогабарнтными показателями и меньшими пульсациями выпрямленного тока нагрузки по сравнению с однофазными ИЕП. При питании от однофазной сети н полном диапазоне изменения нагрузки (от короткого замыкания до номинального значения) мощности реактивных элементов, определяющие массу, габарит и стоимость преобразователя, не могут быть меньше двух мощностей нагрузки, в то время как при трехфазиой питающей сети можио создать преобразователи, у которых эта величина приближается к единице. [c.168]
Одной из наиболее рациональных, обладающей ми нимумом установленных мощностей реактивных эле- [c.168]
mash-xxl.info









