На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток — в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами.
В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается.
По способу возбуждения двигатели постоянного тока делятся на четыре группы:
При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна за другой.
Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока).

© Туманов А.В. 2016-2017
Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье.

Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.

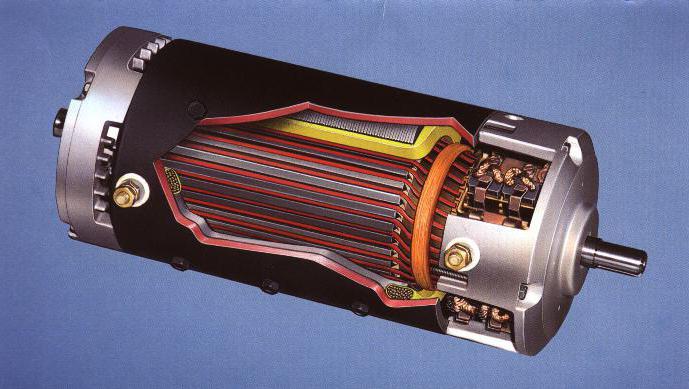
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.

Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
Двигатели постоянного тока (ДПТ), используются для превращения энергии постоянного тока в механическую работу. ДПТ был первой из всех изобретенных вращающихся электромашин. Принцип его действия известен с середины прошлого столетия, и до настоящего времени ДПТ продолжают верно служить человеку, приводя в движение огромное количество машин и механизмов.


Двигатель постоянного тока — историческая справка
В 1821 году Фарадей, проводя эксперименты при взаимодействии проводников с током и магнитом, увидел, что электрический ток вызывает вращение проводника вокруг магнита. Таким образм, опыт Фарадея подготовил почву для создания электрического двигателя. Немногим позже, Томас Дэвенпортв 1833 году изготовил первый роторный электродвигатель постоянного тока, и реализовал его при движении модель поезда. Годом позже, Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором был использован принцип непосредственного вращения подвижной части двигателя. А уже 13 сентября 1838 г в Российской империи первая моторная лодка с 12 пассажирами поплыла по Неве против течения. Колеса с лопостями приводились во вращение электрическим двигателем, который получал ток от батареи из 320 элементов.
В 1886 году электродвигатель постоянного тока стал похож на современные варианты. В дальнейшем он всё более и более модернизировался.
Сегодня жизнь нашей техноргенной цивиализации совершенно невозможна без электродвигателя. Он используется практически везде: в поездах, троллейбусах, трамваях. На заводах и фабриках используются мощные электрические станки, приборы бытовой техники (Электромясорубки, кухонные комбайны, кофемолки, пылесосы) и т.п
Двигатель постоянного тока принцип работы
Подавляющее большинство электродвигателей работает в соответствии с физикой магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней электрический ток, то ее начнет выдавливать наружу.Т.к когда ток течет по проводнику. он формирует вокруг себя кмагнитное поле по всей длине проводника. Направление этого поля можно узнать по правилу буравчика.
При взаимодействии кругового магнитного поля проводника и однородного поля магнита, между полюсами поле с одной стороны уменьшается, а с другой увеличивается. То есть среда результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, в соответствии с правилом левой руки. а величина вычисляется по формуле
где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода
В электродвигателях постоянного тока малой мощности для создания постоянного магнитного поля используются типовые постоянные магниты. В случае средней и большой мощности однородное магнитное поле генерируют с помощью обмотки возбуждения.
Рассмотрим процесс получения механического движения с помощью электричества более подробно. В однородном магнитном поле вертикально разместим проволочную рамку и подключим ее к источнику тока. Рамка начнет проворачивается и достигает горизонтального положения. Которое считается нейтральным, т.к в нем воздействие поля на проводник с током равно нулю. Чтобы движение не останавливалось, нужно поместить ещё хотя бы одну рамку с током и обеспечить переключение направления движения тока в необходимый момент.

Типичный двигатель вместо одной рамки имеет якорь с множеством проводников, уложенных в специальные пазы, а вместо постоянного магнита — статор с обмоткой возбуждения с двумя и более полюсами. На рисунке чуть выше показан двухполюсный электромотор в разрезе. Если по проводам верхней части якоря пропустить ток движущийся «от нас», а в нижней части — «на нас», то в соответствии с правилом левой руки верхние проводники будут выдавливаться из магнитного поля статора влево, а нижней части якоря — выталкиваться вправо. Т.к медный провод размещен в специальных в пазах якоря, то, вся сила будет переходить и на него, и он будет крутиться. Поэтому, когда проводник с направлением тока «от нас» окажется внизу и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и начнется торможение. Чтобы этого избежать требуется поменять направление тока на обратное, в тот момент когда будет пройдена нейтральная линия. Это осуществляется с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с схемой.
Итак, обмотка якоря передает вращающий момент на вал движка постоянного тока, а тот приводит в движение рабочие механизмы. Конструктивно все двигатели состоят из индуктора и якоря, разделенных воздушным промежутком.

Статор электродвигателя служит для создания неподвижного магнитного поля и состоит из станины, главных и добавочных полюсов. Станина предназначена для крепления основных и добавочных полюсов и служит элементом магнитной цепи. На главных полюсах имеются обмотки возбуждения, используемые для создания магнитного поля, на добавочных полюсах расположена специальная обмотка, используемая для улучшения условий коммутации.

Якорь ЭД постоянного тока состоит из магнитной системы, сделанной из отдельных листов, рабочей обмотки, уложенной в специальные пазы, и коллектора для подвода к рабочей обмотке питания.
Коллектор похож на цилиндр, насаженный на вал ЭД и сделанный из изолированных друг от друга медных пластин. На коллекторе находятся специальные выступы-петушки, к которым припаяны концы секций обмотки. Съем тока с коллектора происходит с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки находятся в щеткодержателях, которые удерживают их в определенном положении и создают требуемое нажатие на поверхность коллектора. Щетки и щеткодержатели крепятся на траверсе и связанны с корпусом.

Коллектор сложный, дорогой и самый ненадежный узел ЭД. Он часто искрит, создает помехи, забивается пылью от щеток. А при большой нагрузке может все закоротить наглухо. Его главная задача переключать напряжение якоря туда сюда.
Чтобы лучше понять работу коллектора сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда рамка займет положение, А, в ее проводниках будет индуктироваться максимальный по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с пластиной 2, следует на щетку 4 и, проходя внешнюю цепь, через щетку 3 возвращается в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Поэтому, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, направление тока во внешней цепи не изменилось.
В следующий момент (Г), рамка вторично займет положение на нейтральной линии, в проводниках и, во внешней цепи тока опять не будет.
В последующие временные интервалы рассмотренный цикл движений будет повторяться в той же последовательности, т.о, направление тока во внешней цепи благодаря коллектору все время будет оставаться постоянным, а вместе с этим сохраняеться и полярность щеток.
Щеточный узел используется для подвода питания к катушкам на вращающемся роторе и переключения тока в обмотках. Щетка это неподвижный контакт. Они с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Для уменьшения искрения последних используют различные способы, основным из которых является использование добавочных полюсов.

С ростом разгона начинается следующий процесс, обмотка якоря двигаясь поперек магнитного поля статора и наводит в нем ЭДС. но направлена она встречно той, что вращает ЭД. И в результате, ток через якорь резко уменьшается и тем сильнее, чем больше скорость.
Схемы включения двигателя. При параллельном соединении обмоток, обмотка якоря изготавливается из большого количества витков тонкой проволоки. Тогда коммутируемый коллектором ток будет ниже и пластины не будут сильно искрить. Если выполнить последовательное соединение обмоток статора и якоря, то обмотка индуктора выполняется проводником большего диаметра с меньшим количеством витков. Поэтому, намагничивающая сила остаётся постоянной, а характеристики ЭД увеличиваются.
Недостатками ЭД постоянного тока можно считать быстрый износ щеточно-коллекторного узла. Достоинства – хорошие характеристики запуска, простая регулировка частоты и направления вращения.

Обмотка возбуждения двигателя постоянного тока
Наличие обмотки возбуждения у двигателя постоянного тока дает возможность реализовывать различные схемы подключения. В зависимости от того каким образом соединена обмотка возбуждения (ОВ), бывают двигатели постоянного тока с независимым возбуждением, и с самовозбуждением, которое, в свою очередь разделяется на последовательное, параллельное и смешанное.
Пуск двигателя постоянного тока
Пуск двигателей постоянного тока осложнен возникающими в момент старта огромными значениями моментов и пусковых токов. В ДПТ пусковые токи могут превышать номинальные в 10-40 раз. Такое сильное превышение может легко сжечь обмотки. Поэтому токи при пуске стараются ограничить до уровня (1,5-2) Iн
Асинхронный двигатель. Устройство и принцип работы
Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке.
Cинхронный двигатель. Принцип работы
Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т.к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор.
Схемы управление электродвигателями
Электродвигатели устройства для преобразования электрической энергии в механическую и наоборот, но это уже генераторы. Существует огромное разнобразие типов электромоторов, поэтому и схем управления электродвигателями существует великое множество. Рассмотрим некоторые из них

Источники: http://www.maxplant.ru/article/dc_drive.php, http://ukrlot.com/princip_deystviya_elektrodvigatelya.html, http://www.texnic.ru/books/electrotex/el026.htm
electricremont.ru
 ,
,
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1]
 ,
,
 - электродвижущая сила, В,
- электродвижущая сила, В, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, - угловая частота, рад/с
- угловая частота, рад/сПостоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
 ,
,
 - постоянная электродвигателя, Нм/√Вт,
- постоянная электродвигателя, Нм/√Вт, – максимальный момент, Нм,
– максимальный момент, Нм, - мощность потребляемая при максимальном моменте, Вт
- мощность потребляемая при максимальном моменте, ВтСправка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой.
 ,
,
 - жесткость механической характеристики электродвигателя постоянного тока
- жесткость механической характеристики электродвигателя постоянного токаУравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
 ,
,
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:

Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1].
Упрощенная модель электродвигателя выглядит следующим образом:

Механическая постоянная времени - это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
 ,
,
 - механическая постоянная времени, с
- механическая постоянная времени, сengineering-solutions.ru
Электродвигатель постоянного тока состоит из вращающихся нагнетательных элементов, помещенных на статически закрепленную станину. Подобные устройства широко востребованы в технических областях, где требуется повышение диапазона регулировки скоростей, поддержание стабильного вращения привода.
 Конструктивно электродвигатель постоянного тока состоит из ротора (якоря), индуктора, коллектора и щеток. Давайте рассмотрим, что представляет собой каждый элемент системы:
Конструктивно электродвигатель постоянного тока состоит из ротора (якоря), индуктора, коллектора и щеток. Давайте рассмотрим, что представляет собой каждый элемент системы:
 Механизмы данной категории содержат специальную обмотку возбуждения на индукторной части, куда поступает постоянный ток, что в последующем преобразуется в магнитное поле.
Механизмы данной категории содержат специальную обмотку возбуждения на индукторной части, куда поступает постоянный ток, что в последующем преобразуется в магнитное поле.
Обмотка ротора поддается воздействию потока электроэнергии. Со стороны магнитного поля на данный конструктивный элемент оказывает влияние сила Ампера. В результате образуется крутящий момент, что проворачивает роторную часть на 90о. Продолжается вращение рабочих валов двигателя за счет образования эффекта коммутации на щеточно-коллекторном узле.
При поступлении электрического тока на ротор, который находится под воздействием магнитного поля индуктора, электродвигатели постоянного тока (12 вольт) создают момент силы, что приводит к выработке энергии в процессе вращения валов. Механическая энергия передается от ротора к прочим элементам системы посредством ременной передачи.
 В настоящее время выделяют несколько категорий электродвигателей постоянного тока:
В настоящее время выделяют несколько категорий электродвигателей постоянного тока:
Пуск двигателя осуществляется за счет работы специальных реостатов, которые создают активное сопротивление, включаемое в цепь ротора. Для обеспечения плавного запуска механизма реостат обладает ступенчатой структурой.
Для старта реостата задействуется все его сопротивление. По мере роста скорости вращения возникает противодействие, что накладывает ограничение на рост силы пусковых токов. Постепенно ступень за ступенью увеличивается подводимое к ротору напряжение.
Электродвигатель постоянного тока позволяет регулировать скорость вращения рабочих валов, что осуществляется следующим образом:
 Сравнивая электродвигатели постоянного тока с агрегатами, функционирующими на переменном токе, стоит отметить их повышенную производительность и увеличенный коэффициент полезного действия.
Сравнивая электродвигатели постоянного тока с агрегатами, функционирующими на переменном токе, стоит отметить их повышенную производительность и увеличенный коэффициент полезного действия.
Оборудование данной категории отлично справляется с отрицательным воздействием факторов окружающей среды. Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Защита в виде надежных изоляционных материалов дает возможность задействовать максимальный ресурс агрегатов. Допускается применение подобного оборудования при температурных условиях в пределах от -50 до +50 оС и относительной влажности воздуха порядка 98 %. Запуск механизма возможен после периода длительного простоя.
Среди недостатков электрических двигателей постоянного тока на первое место выходит достаточно быстрый износ щеточных узлов, что требует соответствующих расходов на обслуживание. Сюда же относится крайне ограниченный срок службы коллектора.
www.syl.ru
Не всякий электрический двигатель можно однозначно назвать способным работать от постоянного тока. Касается коллекторного типа. На нем базируются устройство, принцип работы электродвигателя постоянного тока. Статор состоит из набора обмоток, каждая работает только на ограниченной части дуги хода вала. В противном случае реализовать концепцию невозможно.
Коллекторный двигателей используется повсеместно бытовой техникой. 90% домашних применений приходится на этот сегмент. Двигатели стиральных машин, пылесосов, электрического инструмента. Исключением, назовем холодильники, вентиляторы, ветродувки, некоторые вытяжки. Вызвано требованиями бесшумности. Каждый, кто слышал, как ездит маленькая машинка от батарейки, понимает. В ночное время слышно каждый шорох, коллекторный двигатель навел бы шороху. Попробуйте включить на одну-две секунды болгарку в шесть часов утра – поймете.
Согласно законодательству в темное время суток уровень звукового давления не превышает 30 дБ. В противном случае техника помешает спокойному сну. Шум вызван трением щеток о коллектор, ротор двигателя сравнительно тяжелый, малейшая несоосность отдается в подшипниках. Люфт есть, массивнее движущаяся часть, акустический эффект заметнее. У коллекторных двигателей предостаточно недостатков, зато могут работать от постоянного тока. Чтобы уменьшить габариты, снижают число катушек. Для однозначного задания направления вращения необходимо минимум три полюса, причем никогда не работают параллельно.

Двигатель постоянного тока
У коллекторного двигателя бытовой техники великое количество полюсов ротора. Ниже упрощенный рисунок для постоянного тока. Коллекторный двигатель работает в схожем режиме, магнитов статора больше, все электрические. Питание ведется переменным напряжением 220 вольт. Подошли к главной тайне! Нет разницы, питать коллекторный двигатель переменным, постоянным током. С точки зрения обывателя. Существуют некоторые особенности:
В коллекторном двигателе бытовой техники статор соединяется последовательно ротору. Для передачи энергии на вал используется токосъемник в виде барабана, разделенного секциями. Электродами послужат графитовые щетки с прижимными пружинами. На корпусе выводы статора и ротора разграничены, обеспечивая возможности реализации функции реверса. Среди контактов могут быть вспомогательные: три вывода датчика Холла (два тахометра), окончания термопредохранителя.
По мере кручения вала щетки постепенно переключаются на следующую секцию, полюс ротора сдвигается. Статор остается на прежнем месте. Обратите внимание, полярность меняется с удвоенной частотой сети (50 Гц), характер взаимодействия остается прежним. Одинаковые полюсы отталкиваются, разнородные притягиваются. Путем особого распределения обмотки, коммутации с коллектором обеспечивается нужное направление вращения. Проявляется независимость двигателя от типа питающего напряжения (постоянного или переменного). Некоторые особенности коллекторного оборудования, присущие только данному типу устройств читайте ниже.
Паразитный эффект часто применяется на пользу, недостатки в виде помех послужат оценке скорости вращения вала. При увеличении нагрузки на вал обороты снижаются. Падает величина паразитной противо-ЭДС, эффект приводит к уменьшению уровня искрения. Специальная схема отслеживает фактор, увеличивая напряжение питания. Скорость оборотов восстанавливается. Подобные схемы найдем в кухонных комбайнах; в стиральных машинах для контроля вращения применяются специальные датчики (тахометр).

Принцип действия
Величина ЭДС вырастает до недопустимого размера, сопротивление защиты в десятки тысяч раз уменьшается, лишний ток закорачивается корпусом. Варисторы используются парно. Объединяют обе щетки через корпус коллекторного двигателя. Вилки пылесосы зачастую лишены клеммы заземление, успешно снабжаются варисторной защитой. Искра замыкается стальным корпусом, ввиду больших размеров, массы разогрев отсутствует. Смертельно опасно браться одной рукой за коллекторный двигатель с такими изысками, другой — хватать заземленные металлические конструкции (пожарные лестницы; водопроводные, канализационные, газовые трубы; шины громоотводов; оплетки антенных кабелей).
Корпус электроинструмента снабжен съемными щечками, щетки меняются в течение считаных минут. Уберегает от необходимости разбирать прибор для технического обслуживания. Признаком износа щеток выступает сильное искрение. Оборудование поизносилось. Новые щетки при притирании сильно искрят. В случае износа наблюдается падение мощности. Дрель перестает вращать сверло, останавливается барабан стиральной машины при номинальной массе загруженного белья. Не всегда удается достать оригинальные щетки, комплектующие можно подточить до необходимых размеров шлифовальным инструментом.

Обороты электродвигателя
Искрение, срыв оборотов наблюдаются при загрязнении барабана. Ротор вынимается, проводится чистка подходящим средством (спиртом).
Устройство электродвигателя постоянного тока не отличается от моделей, работающих под переменным напряжением. Вышесказанное касается любого типа оборудования.
Под токосъемником простейшего двигателя две секции. Выродился барабан коллектора. Каждая контактная ламель (пластинка на валу) занимает половину оборота. Одна щетка снабжается положительным потенциалом, вторая — отрицательным, сообразно меняется направление магнитного поля полюсов. Активными в каждый момент времени являются два (в описанной выше конструкции). Статора может формироваться постоянным электрическим полем, либо металлическим магнитом. Последнее применяется детскими машинками.
Как работает электродвигатель постоянного тока. Допустим, в начальный момент времени обмотки расположены так, как показано на рисунке. В нашем примере полюсов уже не два, как обсуждали выше, — три. Минимальное число для стабильного запуска электрического двигателя постоянного тока в нужном направлении. Обмотки соединены схемой звезды, у каждой пары одна общая точка. Напряженность поля формирует два полюса отрицательных, один положительный. Постоянный магнит стоит, как показано рисунком.

Упрощенный рисунок случая постоянного тока
Каждую треть оборота происходит перераспределение поля так, что полюса сдвигаются согласно изменению напряжения питания на ламелях. На второй эпюре видим: номера обмоток сдвинулись, картина в пространстве осталась. Залог стабильности: один полюс притягивается к постоянному магниту, второй отталкивается. Если нужно получить реверс, меняется полярность подключения батарейки (аккумулятора). В результате получается два положительных полюса, один отрицательный. Вал станет двигаться против часовой стрелки.
Полагаем, принцип действия электродвигателя постоянного тока теперь понятен. Добавим, сегодня распространены двигатели вентильного типа. Многие задумались заставить поля чередоваться на статоре, ротор представлял бы постоянный магнит. В первом приближении двигатель вентильного типа. Постоянный ток подается на нужные обмотки статора через коммутируемые ключи-тиристоры. В результате создается нужное распределение поля.
Преимущества схемы в снижении количества трущихся частей, являющихся причиной необходимости обслуживания, ремонта. Тиристорный блок управления достаточно сложный. Допускается организовать коммутацию при помощи ламелей. Одновременно конструкция послужит грубым датчиком положения вала (плюс минус расстояние между контактными площадками оси вала). Вентильные двигатели не новы. Широко применяются специфическими отраслями. Помогают точно выдержать частоту вращения. В быту вентильные двигатели найти сложно. Некое подобие можно лицезреть в стиральной машине. Речь о помпе слива воды (ротор магнитный, только ток переменный).
Технические характеристики электродвигателей постоянного тока лучше, нежели при питании переменным током. Класс устройств широко применяется. Чаще электродвигатели постоянного тока используются при питании батареями различного рода. Когда нет выбора. Преимущества схемы питания позволят аккумуляторам дольше продержаться.
Обмотки статора, ротора включают последовательно, параллельно. Последнее применяется при нагруженном в исходном состоянии валу. Наблюдается резкое повышение оборотов, может привести к негативным последствиям, если ротор слишком легко идет. Упоминали о подобных тонкостях в теме конструирования двигателей своими руками.
vashtehnik.ru
Двигатели постоянного тока прежде всего различаются по характеру возбуждения. Двигатели могут быть независимого, последовательного и смешанного возбуждения. Параллельное возбуждение можно не рассматривать. Даже если обмотка возбуждения подключается к той же сети, от которой питается цепь якоря, то и в этом случае ток возбуждения не зависит от тока якоря, так как питающую сеть можно рассматривать как сеть бесконечной мощности, а ее напряжение постоянным.Обмотку возбуждения всегда подключают непосредственно к сети, и поэтому введение добавочного сопротивления в цепь якоря не оказывает влияния на режим возбуждения. Той специфики, которая существует при параллельном возбуждении в генераторах, здесь быть не может.В двигателях постоянного тока малой мощности часто используют магнитоэлектрическое возбуждение от постоянных магнитов. При этом существенно упрощается схема включения двигателя, уменьшается расход меди. Следует однако иметь в виду, что, хотя обмотка возбуждения исключается, габариты и масса магнитной системы не ниже, чем при электромагнитном возбуждении машины.Свойства двигателей в значительной мере определяются их системой возбуждения.Чем больше габариты двигателя, тем, естественно, больше развиваемый им момент и соответственно мощность. Поэтому при большей скорости вращения и тех же габаритах можно получить большую мощность двигателя. В связи с этим, как правило, двигатели постоянного тока, особенно малой мощности, проектируются на большую частоту вращения — 1000-6000 об/мин.Следует, однако, иметь в виду, что скорость вращения рабочих органов производственных машин существенно ниже. Поэтому между двигателем и рабочей машиной приходится устанавливать редуктор. Чем больше скорость двигателя, тем более сложным и дорогим получается редуктор. В установках большой мощности, где редуктор представляет собой дорогостоящий узел, двигатели проектируются на существенно меньшие скорости.Следует еще иметь в виду, что механический редуктор всегда вносит значительную погрешность. Поэтому в прецизионных установках желательно использовать тихоходные двигатели, которые можно было бы сочленить с рабочими органами либо напрямую, либо посредством простейшей передачи. В связи с этим появились так называемые высокомоментные двигатели на низкие скорости вращения. Эти двигатели нашли широкое применение в металлорежущих станках, где сочленяются с органами перемещения без каких-либо промежуточных звеньев посредством шарико-винтовых передач.Электрические двигатели отличаются также по конструктивным при знакам, связанным с условиями их работы. Для нормальных условий используются так называемые открытые и защищенные двигатели, охлаждаемые воздухом помещения, в котором они устанавливаются.Воздух продувается через каналы машины посредством вентилятора, размещенного на валу двигателя. В агрессивных средах используются закрытые двигатели, охлаждение которых осуществляется за счет внешней ребристой поверхности или наружного обдува. Наконец, выпускаются специальные двигатели для взрывоопасной среды.
Специфические требования к конструктивным формам двигателя предъявляются при необходимости обеспечения высокого быстродействия — быстрого протекания процессов разгона, торможения. В этом случае двигатель должен иметь специальную геометрию — малый диаметр якоря при большой его длине.Для уменьшения индуктивности обмотки ее укладывают не в пазы, а на поверхность гладкого якоря. Крепится обмотка клеющими составами типа эпоксидной смолы. При малой индуктивности обмотки существенно улучшаются условия коммутации на коллекторе, отпадает необходимость в дополнительных полюсах, может быть использован коллектор меньших размеров. Последнее дополнительно уменьшает момент инерции якоря двигателя.Еще большие возможности для снижения механической инерции дает использование полого якоря, представляющего собой цилиндр из изоляционного материала. На поверхности этого цилиндра располагается обмотка, изготовляемая печатным способом, штамповкой или из про волоки по шаблону на специальном станке. Крепление обмотки осуществляется клеющими материалами.Внутри вращающегося цилиндра располагается стальной сердечник, необходимый для создания путей прохождения магнитного потока. В двигателях с гладким и полым якорями вследствие увеличения зазоров в магнитной цепи, обусловленного внесением в них обмотки и изоляционных материалов, требуемая намагничивающая сила для проведения необходимого магнитного потока существенно возрастает. Соответственно магнитная система получается более развитой.К числу малоинерционных двигателей относятся также двигатели с дисковыми якорями. Диски, на которые наносятся или наклеиваются обмотки, изготовляются из тонкого изоляционного материала, не подверженного короблению, например из стекла. Магнитная система при двухполюсном исполнении представляет собой две скобы, на одной из которых размещены обмотки возбуждения. В связи с малой индуктивностью обмотки якоря машина, как правило, не имеет коллектора и съем тока осуществляется щетками непосредственно с обмотки.Следует еще упомянуть о линейном двигателе, обеспечивающем не вращательное движение, а поступательное. Он представляет собой двигатель, магнитная система которого как бы развернута и полюсы устанавливаются на линии движения якоря и соответствующего рабочего органа машины. Якорь обычно выполняется как малоинерционный. Габариты и стоимость двигателя велики, так как необходимо значительное число полюсов для обеспечения перемещения на заданном отрезке пути
morez.ru

Рис. 1 Устройство простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
Простейший двигатель на рис. 1 является машиной постоянного тока, состоит из одного постоянного магнита на статоре, из одного электромагнита с явно выраженными полюсами на роторе (двухполюсного ротора с явно выраженными полюсами и с одной обмоткой из двух частей), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками. Имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент, в первом приближении (магнитное поле полюсов статора B — равномерное (однородное) и др.) равный
 , где
, где  - число витков обмотки ротора,
- число витков обмотки ротора,  - индукция магнитного поля полюсов статора,
- индукция магнитного поля полюсов статора,  - ток в обмотке ротора [А],
- ток в обмотке ротора [А],  - длина рабочей части витка обмотки [м],
- длина рабочей части витка обмотки [м],  - расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
- расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],  - синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
- синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],  - угловая скорость [рад/сек],
- угловая скорость [рад/сек],  - время [сек].
- время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвует в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
 , где n - число щёток, alfa - угловая ширина одной щётки [радиан].
, где n - число щёток, alfa - угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1оборот =  ):
):


Рис. 2 Коллекторный двигатель постоянного тока с двухполюсным статором и с трёхполюсным ротором
Двигатель на рис. 2 состоит из одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой, трёхполюсного ротора с явно выраженными полюсами и с тремя обмотками (обмотки ротора могут быть включены звездой или треугольником), щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками. Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухполюсным ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название "двигатель переменного тока" имеет то же сокращение - ДПТ. Но так как двигатели переменного тока разделяются на ассинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
На статоре ДПТ располагаются в зависимости от конструкции:
В простейшем случае имеет два полюса, т.е. один магнит с одной парой полюсов.
Состоит из электромагнитов с переключаемой полярностью и датчика положения ротора и переключателя (коллектора). В простейшем случае ротор состоит из одного электромагнита с двумя полюсами, т.е. имеет одну пару полюсов, при этом есть две "мёртвые точки" из которых невозможен самозапуск двигателя.

Рис. 3 Ротор
Ротор с тремя полюсами (полторы пары) имеет наименьшее число полюсов ротора при которых самозапуск возможен из любого положения ротора. На самом деле один полюс всё время делится на две части, т.е. ротор имеет неявные две пары полюсов. Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его в первом приближении можно считать сплошным однородным цилиндром с моментом инерции равным  где
где  - масса цилиндра (ротора), а
- масса цилиндра (ротора), а  - радиус цилиндра (ротора).
- радиус цилиндра (ротора).
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции - является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.

Рис. 4 Графитовые щётки
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором положения щёток относительно статора (снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики электродвигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
В принципе работы электродвигателя постоянного тока есть два подхода: 1. рамка (2 стержня) с током в магнитном поле статора, 2. взаимодействие магнитных полей статора и ротора.
В однородном магнитном поле полюсов статора с индукцией на два стержня рамки длиной с током действуют силы Ампера  постоянной величины, равные
постоянной величины, равные
 и направленные в противоположные стороны.
и направленные в противоположные стороны.
Эти силы прикладываются к плечам  , равным
, равным
 , где - радиус рамки, и создают крутящий момент
, где - радиус рамки, и создают крутящий момент  , равный
, равный
 .
.
Для двух стержней рамки суммарный крутящий момент равен
 . Практически из-за того, что угловая ширина щётки
. Практически из-за того, что угловая ширина щётки  [радиан] немного меньше угловой ширины зазора
[радиан] немного меньше угловой ширины зазора  между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные
между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко, четыре небольших части под кривой крутящего момента, равные  , где
, где  , не участвуют в создании общего крутящего момента.
, не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s крутящий момент будет равен .
Наибольший крутящий момент будет при угле поворота рамки равном  , т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
, т.е. 90°, при этом угле поворота рамки с током вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, т.е. под углом 90°. При угле поворота ротора (рамки) 180° крутящий момент равен нулю из-за нулевого плеча, но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента делённой на длину периода  :
:

При s витков в обмотке

Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π / 2, то получится четырёхполюсный ротор. Момент второй рамки:

Суммарный момент обеих рамок:

Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α [рад] немного меньше угловой ширины зазора β [рад] между пластинами коллектора (ламелями) восемь небольших частей под кривой крутящего момента, равных
 , где Δ = β − α, не участвуют в создании общего крутящего момента.
, где Δ = β − α, не участвуют в создании общего крутящего момента.
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону
 , то крутящий момент для одного стержня будет равен
, то крутящий момент для одного стержня будет равен
 ,
,
для двух стержней
 ,
,
для рамки из витков
 .
.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные
 .
.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода :

При s витках в обмотке

Для второй (косинусной) рамки  ,
,
крутящий момент от второй (косинусной) рамки будет равен
 ,
,
суммарный крутящий момент от обеих рамок равен
 , т.е. постоянен и от угла поворота ротора не зависит.
, т.е. постоянен и от угла поворота ротора не зависит.
Практически, из-за наличия зазора, восемь небольших частей под кривой крутящего момента равные
 каждая,
каждая,
в создании крутящего момента не участвуют.
Для вычисления момента инерции ротора его можно считать в первом приближении сплошным однородным цилиндром с моментом инерции
 , где - масса цилиндра (ротора), - радиус цилиндра (ротора).
, где - масса цилиндра (ротора), - радиус цилиндра (ротора).
Магнитные поля статора и ротора (рамки с током), взаимоотталкиваются, чем ротор (рамка) приводится во вращение на 180°. Для дальнейшего вращения необходимо переключение направления тока в рамке.
С одним коллектором (щёточноколлекторным узлом) и  обмотками, где
обмотками, где  - число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
- число пар полюсов ротора, с соединением обмоток ротора в кольцо (по этой классификации двигатель на рис. 2 является полуторным, имеет полторы пары полюсов и 2*1,5=3 обмотки ротора). Имеют большую короткозамкнутую щётками часть обмотки ротора, равную
 , где
, где  - число щёток, - угловая ширина одной щётки (рад),
- число щёток, - угловая ширина одной щётки (рад),  - число пи (3,14...).
- число пи (3,14...).
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных с инвертором на двух параллельных мостах) и двумя обмотками синусной и косинусной (синусно-косинусный, двухфазный) с неоднородным (синусообразным) магнитным полем полюсов статора. Имеют малую нерабочую часть под кривой крутящего момента, равную
 , где
, где  - угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
- угловая ширина зазора между пластинами коллектора (ламелями), подобен двухфазному бесколлекторному.
С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).
С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), специальные. Специальная конструкция коллектора с четырьмя коллекторами (один коллектор на одну щётку) позволяет почти до нуля уменьшить нерабочую часть крутящего момента (нерабочая часть крутящего момента в этом двигателе зависит от точности изготовления деталей) и сделать используемую часть крутящего момента независимой от угловой ширины щётки. При этом угловая ширина одной пластины коллектора равна  , где - угловая ширина одной щётки.
, где - угловая ширина одной щётки.
С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных - с инвертором на четырёх параллельных мостах, четырёхфазный).
С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
И др.
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (Вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора говорят о семействе регулировочных характеристик ДПТ.
Основные формулы, используемые при управлении ДПТ:
Крутящий момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора):
 , где
, где  - ток в обмотке якоря,
- ток в обмотке якоря,  — коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
— коэффициент крутящего момента двигателя (зависит от конструкции двигателя и тока в обмотке возбуждения).
Ток в обмотке ротора по закону Ома прямо пропорционален приложенному напряжению и обратно пропорционален сопротивлению обмотки ротора:
 , где
, где  - напряжение, приложенное к обмотке ротора,
- напряжение, приложенное к обмотке ротора,  — сопротивление обмотки ротора.
— сопротивление обмотки ротора.
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  - угловая скорость вращения ротора.
- угловая скорость вращения ротора.
Следовательно, величиной крутящего момента можно управлять меняя напряжение на ДПТ. Такой способ применяют для относительно маломощных двигателей.
Для управления более сильными (мощными) двигателями используют: а) принцип ШИМ, когда изменяется не величина напряжения, а длительность его приложения к двигателю, б) регулирование крутящего момента изменением напряжения на обмотке возбуждения, требует меньшую мощность элементов схемы управления, чем регулирование изменением напряжения на всём двигателе, но при этом способе регулирования ток через обмотку якоря не управляется, из-за этого даже при малом крутящем моменте большой ток через обмотку якоря будет нагревать обмотку якоря, что может привести к перегреву и выходу из строя двигателя. Возможно применение для регулирования крутящего момента в небольших пределах от номинального крутящего момента.
Управление двигателем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Достоинства:
Недостатки:
Wikimedia Foundation. 2010.
dic.academic.ru
Министерство образования и науки Российской Федерации
ГОУ ВПО Южно-Уральский государственный университет
Филиал в г. Златоусте
Реферат
Двигатели постоянного тока
ЗД-431.583.270102
Выполнил: Шарипова Ю.Р.
Группа: ЗД-431
Проверил: Румянцев.Е.
Содержание
1. Введение
2. Устройство и принцип действия двигателей постоянного тока
3. Пуск двигателей
4. Технические данные двигателей
5. Кпд двигателей постоянного тока
6 Характеристики двигателя постоянного тока
6.1 Рабочие характеристики
6.2 Механическая характеристика
7. Список используемой литературы
1.Введение
Электрические машины постоянного тока широко применяются в различных отраслях промышленности.
Значительное распространение электродвигателей постоянного тока объясняется их ценными качествами: высокими пусковым, тормозным и перегрузочным моментами, сравнительно высоким быстродействием, что важно при реверсировании и торможении, возможностью широкого и плавного регулирования частоты вращения.
Электродвигатели постоянного тока используют для регулируемых приводов, например, для приводов различных станков и механизмов. Мощности этих электродвигателей достигают сотен киловатт. В связи с автоматизацией управления производственными процессами и механизмами расширяется область применения маломощных двигателей постоянного тока общего применения мощностью от единиц до сотен ватт.
В зависимости от схемы питания, обмотки возбуждения машины постоянного тока разделяются на несколько типов (с независимым, параллельным, последовательным и смешанным возбуждением).
Ежегодный выпуск машин постоянного тока в РФ значительно меньше выпуска машин переменного тока, что обусловлено дороговизной двигателей постоянного тока.
Вначале создавались машины постоянного тока. В дальнейшем они в значительной степени были вытеснены машинами переменного тока. Благодаря возможности плавного и экономичного регулирования скорости вращения двигатели постоянного тока сохраняют свое доминирующее значение на транспорте, для привода металлургических станков, в крановых и подъемно-транспортных механизмах. В системах автоматики машины постоянного тока широко используются в качестве исполнительных двигателей, двигателей для привода лентопротяжных самозаписывающих механизмов, в качестве тахогенераторов и электромашинных усилителей.
2. Устройство и принцип действия двигателей постоянного тока
Устройство машин постоянного тока (генераторов и двигателей) в упрощенном виде показано на рис.1. К стальному корпусу 1 статора машины прикреплены главные 2 и дополнительные 4 полюса. На главных полюсах расположена обмотка возбуждения 3, на дополнительных - обмотка дополнительных полюсов 5. Обмотка возбуждения создает магнитный поток Ф машины.

Рис.1
На валу 10 двигателя закреплен цилиндрический магнитопровод 6, в пазах которого расположена обмотка якоря 7. Секции обмотки якоря присоединены к коллектору 9. К нему же прижимаются пружинами неподвижные щетки 8. Закрепленный на валу двигателя коллектор состоит из ряда изолированных от него и друг от друга медных пластин. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках обмотки якоря.
Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают.
Для уменьшения потерь мощности магнитопровод якоря выполнен из отдельных стальных листов. Все обмотки изготовлены из изолированного провода. Кроме двигателей, имеющих два главных полюса, существуют машины постоянного тока с четырьмя и бόльшим количеством главных полюсов. При этом соответственно увеличивается количество дополнительных полюсов и комплектов щеток.
Если двигатель включен в сеть постоянного напряжения, то при взаимодействии магнитного поля, созданного обмоткой возбуждения, и тока в проводниках якоря возникает вращающий момент, действующий на якорь:
 (1)
(1)
 (2)
(2)
где КМ - коэффициент, зависящий от конструктивных параметров машины; Ф - магнитный поток одного полюса; IЯ - ток якоря.
Если момент двигателя при n = 0 превышает тормозящий момент, которым нагружен двигатель, то якорь начнет вращаться. При увеличении частоты вращения n возрастает индуцируемая в якоре ЭДС. Это приводит к уменьшению тока якоря:
 (3)
(3)
где rЯ - сопротивление якоря.
Следствием уменьшения тока IЯ является уменьшение момента двигателя. При равенстве моментов двигателя и нагрузки частота вращения перестает изменяться.
Направление момента двигателя и, следовательно, направление вращения якоря зависят от направления магнитного потока и тока в проводниках обмотки якоря. Чтобы изменить направление вращения двигателя, следует изменить направление тока якоря либо тока возбуждения.
3. Пуск двигателей
Из формулы (3) следует, что в первое мгновение после включения двигателя в сеть постоянного напряжения, т.е. когда  и
и  ,
,

Так как сопротивление rЯ невелико, то ток якоря может в 10…30 раз превышать номинальный ток двигателя, что недопустимо, поскольку приведет к сильному искрению и разрушению коллектора. Кроме того, при таком токе возникает недопустимо большой момент двигателя, а при частых пусках возможен перегрев обмотки якоря.
Чтобы уменьшить пусковой ток в цепи якоря, включают пусковой резистор, сопротивление которого по мере увеличения частоты вращения двигателя уменьшают до нуля. Если пуск двигателя автоматизирован, то пусковой резистор выполняют из нескольких ступеней, которые выключают последовательно по мере увеличения частоты вращения.
Пусковой ток якоря

По мере разгона двигателя в обмотке якоря возрастает ЭДС, а как следует из формулы (3), это приводит к уменьшению тока якоря IЯ . Поэтому по мере увеличения частоты вращения двигателя сопротивление в цепи якоря уменьшают. Чтобы при сравнительно небольшом пусковом токе получить большой пусковой момент, пуск двигателя осуществляют с наибольшим магнитным потоком. Следовательно, ток возбуждения при пуске должен быть максимально допустимым, т.е. номинальным.
4.Технические данные двигателей
В паспорте двигателя и справочной литературе на двигатели постоянного тока указаны следующие технические данные: номинальные напряжение Uи , мощность Pн , частота вращения nн, ток Iн , КПД.
Под номинальным Uн понимают напряжение, на которое рассчитаны обмотка якоря и коллектор, а также в большинстве случаев и параллельная обмотка возбуждения. С учетом номинального напряжения выбирают электроизоляционные материалы двигателя.
Номинальный ток Iн – максимально допустимый ток (потребляемый из сети), при котором двигатель нагревается до наибольшей допустимой температуры, работая в том режиме (длительном, повторно-кратковременном, кратковременном), на который рассчитан:

где Iян — ток якоря при номинальной нагрузке; Iвн – ток обмотки возбуждения при номинальном напряжении.
Следует отметить, что ток возбуждения Iвн двигателя параллельного возбуждения сравнительно мал, поэтому при номинальной нагрузке обычно принимают

Номинальная мощность Рн - это мощность, развиваемая двигателем на валу при работе с номинальной нагрузкой (моментом) и при номинальной частоте вращения nн .
Частота вращения nн, и КПД соответствуют работе двигателя с током Iн , напряжением Uн без дополнительных резисторов в цепях двигателя.
В общем случае мощность на валу P2 , момент М и частота вращения n связаны соотношением:

Потребляемая двигателем из сети мощность Р1 , величины P2, КПД, U, I связаны соотношениями:


где 
mirznanii.com