Технический тренд MotoGP сезона 2016 года - моторы с коленвалами обратного вращения, работающие против часовой стрелки и противоположные направлению вращения колес. Такими агрегатами в этом году обзавелись все прототипы чемпионата, включая байки с компоновкой V4: это Ducati, Aprilia и даже Honda, которая стала "как все" из-за множества проблем с характером прошлогоднего байка.
Зачем развернули моторы? Обозреватель MotoGP Мэт Оксли пробует дать ответ:
Гироскопический эффект - мой любимый природный феномен после света солнца, дождя и свежего воздуха. Это потому что без него мы бы не смогли ездить на мотоциклах. Если вы мне не верите, в следующей раз, когда поедете кататься, попробуйте так: когда остановитесь у светофора, не опускайте ногу (и не присылайте мне счет).
Вращающиеся колеса мотоцикла создают гироскопический эффект, который поддерживает вертикальное состояние машины. Чем больше скорости, тем больше гиро и больше устойчивости. Все это хорошо, если вы не в гонках. Большинству гонщиков плевать на устойчивость на прямой: на прямых они рады держаться за байк как гориллы, пока тот за мгновение ока не повернет налево или направо.
И вот почему все заводы премьерного класса Гран-При - возможно, впервые в истории, - сейчас "развернули" свои моторы. Этим также можно объяснить, почему победы Марка Маркеса на Трассе Америк и в Аргентине были настолько громадными [по отрывам] - больше всех сухих побед прошлого года.

Когда двигатель вращается вперед (как у большинства дорожных байков), коленвал вращается в том же направлении, что колеса - это, вдобавок к гироэффекту, усложняет вход в поворот или перекладку. Очевидный способ уменьшить гироэффект - развернуть направление вращения мотора так, чтобы вал обратного вращения уменьшил гироэффект в целом, который создается быстро крутящимися колесами.
Положительное влияние на динамику мотоцикла существенное: мотоцикл будет быстрее поворачивать и быстрее менять направление - в современных гонках этому уделяется огромное внимание, так как большинство гоночных треков очень плотные и закрученные. Мотор обратного вращения также уменьшает вили, потому что реактивный момент заставляет на разгонах опускать переднее колесо, а не поднимать его (хотя это не так важно, как в дни "двухтактников", когда инерция коленвала была больше).
Однако, в гонках все имеет цену: если мотор у вас крутится назад, то ему нужен промежуточный вал, чтобы заднее колесо вращалось в правильном направлении. Этот вал забирает значительное число лошадиных сил, как и увеличивает массу мотора и габариты. В теории, вал обратного вращения также увеличивает недостаточную поворачиваемость в поворотах, заставляя байк широко из него выходить, что не дает райдеру открывать дроссель. Но все эти издержки, видимо, стоящие, потому что "Хонда" в этом году развернула вращение мотора своего RC213V. Она впервые развернула мотор со времен "пятисоток".

Последний раз, когда "Хонда" вращалась назад, был в 1987-м. Первый NSR500, рожденный в 1984-м, был сущим наказанием - частично из-за того, что двухтактный мотор V4 крутился вперед. Реактивный момент от вращающегося вперед коленвала поднимал переднее колесо на разгоне, создавая гонщикам множество проблем, которые слишком много времени тратили на борьбу со "свечками" вместо осмысления следующего поворота. С 1987-го NSR крутились назад и выиграли восемь из последних 13 "пятисоточных" титулов.
Текущий вопрос, конечно, в том, насколько смена мнения HRC связана с победами-побегами Маркеса в Аргентине и Техасе (семь секунд и восемь секунд соответственно - по крайней мере, пока он не успокоился на последнем круге на COTA).
Новый двигатель точно помог, но больше всего - потрясающий талант человека и его словно хамелеоновая способность адаптироваться к новым технологиям. На двух последних гонках 23-летний Марк танцевал свой RCV, укрощая непростую переднюю "Мишлен", блокируя и потом разблокируя шину, вдавливая и разжимая шину, с реакцией, которую можно описать только как сверхчеловеческую. И Маркес добился этих опустошающих успехов, несмотря на дополнительный промежуточный вал, который стоит RCV, возможно, семи-восьми лошадиных сил - одна из причин, почему мотоцикл на прямых уже не ракета для прожевывания М1.

COTA особенно знаменит своей головокружительной, словно змеиной последовательностью поворотов, с которых начинается каждый круг: левый/правый/левый/правый/левый/правый/левый/правый/левый. От поворота 1 до 9 всего за 30 секунд. Конечно, обратный вал RCV помог Маркесу проходить ее туда-сюда-туда-сюда-туда-сюда-туда так, как никогда.
Но одна из самых крутых вещей мотогонок в том, что научная теория не всегда укладывается в реальность гоночного трека. Инженеры слишком часто "штурмуют" цифры - только для того, чтобы райдер вернулся в гараж и сказал им, что жизнь не перекликается с видением вещей компьютером. Таким образом, обратный вал RCV помог Маркесу, но не совсем так, как ожидали инженеры HRC.
"В прошлом году я мог заворачивать быстрее, но сейчас мне нужно идти шире и возвращаться, так что я немного изменил свой стиль", - сказал он на Трассе Америк. "Сейчас я должен использовать стиль езды вроде "ямаховского" стиля: заходить в повороты шире и хорошо готовить выходы из крутых поворотов. Такую траекторию использую: иду шире и возвращаюсь. Так теряем меньше, и на перекладках байк, похоже, чуть получше. В прошлом году мы быстрее меняли направление, сейчас чуть медленнее, но можем держать больше скорости. Не знаю... Это странно, но такой у двигателя характер".

Чертовски правильно: это странно. В общем, обратный коленвал заставляет его поворачивать медленнее, но он быстрее. Конечно, Маркес имеет в виду, что он использует дуговые траектории, которые дают больше скорости в повороте, вместо того, чтобы в повороте остановиться, прицелиться, стартовать и вылететь. Просто это другой способ показать время круга.
В том году у "Хонды" были всевозможные проблемы с ее пакетом двигатель/шасси: на разгоне двигатель слишком быстро раскручивался, а не на разгоне блокировался - вероятно, из-за слишком легкого коленвала, созданного в погоне за более высокой пиковой мощностью. С этим разворот двигателя тоже помог, потому что масса коленвала оказывает меньший эффект на динамику, поэтому HRC может использовать коленвал потяжелее ради более дружелюбных реакций на газ. Точно так же она сделала с NSR500 и RC45.
Обычно HRC - это один из последних заводов, которые в MotoGP используют моторы обратного вращения, потому что он всегда стремиться быть первым и не любит копировать, но в наши дни побеждать важнее, чем когда-либо, так что к черту давние убеждения и традиции.
У "Сузуки" и "Ямахи" моторы многие годы крутятся назад, но другие заводы перестроились позже. "Дукати" впервые кардинально развернула "Десмоседичи" назад в прошлогоднем GP15 - мотоцикле, который построил Даллинья. Кошмар с поворачиваемостью "Десмоседичи" вдруг исчез.

Гонщик и тест-пилот Ducati Микеле Пирро ощутил опыт быстрых перемен между GP14 и GP15: "Маневренность лучше и проворность [на перекладке] с одной стороны на другую тоже лучше". Как и комментарии Маркеса про то, что RCV медленнее, но быстрее, комментарии Пирро о неповорачиваемости тоже влетели инженерам в лицо: "Заход в повороты гораздо лучше, потому что мотоцикл не сильно грузит перед, и больше нет такой недостаточной поворачиваемости, как раньше", добавил итальянец. "К тому же момент вала уменьшает вили, что важно, ведь каждый год у нас все больше мощности, а в этом году у нас с единым софтом слабее контроль вили".
Aprilia в этом сезоне тоже "развернулась", чтобы идти вперед. В прошлом году шеф "Априлии" Романо Альбезиано начал конструировать первый полностью прототипный мотор "Априлии" для MotoGP на замену дорожному мотору RSV4, который она использовала со времен CRT. Он начал с мотора переднего вращения, как RSV4, и затем посреди процесса конструирования развернул мотор. Это непростая работа: вы не просто меняете коленвал - большая часть двигателя нуждается в переделке, включая картер и маслонасос, ведь разворот коленвала абсолютно иначе отражается на циркуляции масла. Вот почему новая Aprilia так поздно выехала на трек.
В общем, сейчас, когда Honda и Aprilia "развернулись", мы имеем полную решетку мотоциклов MotoGP обратного вращения, так что на самом деле не важно, совпадают ли комментарии гонщиков с домашней работой инженеров, потому что если все заводы согласны, то наверняка должна быть какая-то правда в том, что они делают?
И опять же: в паддоке есть опытные механики, которые уверены, что не важно, в каком направлении крутится двигатель. Они настаивают на том, что за и против у каждого вращения нивелируют друг друга. Также они предполагают, что такие изменения - это просто работа компаний, ведь им нравится делать новые вещи, а инженерам нравится приходить с новыми идеями, чтобы сохранить свою работу. В конце концов, если бы техногики в "Майкрософте" решили, что Windows 10.2 был идеален, то не было бы нужды в Windows 11. В общем, им всем бы пришлось уволиться и идти работать в Starbucks.
Но я считаю, что если все заводы с чем-то согласились, то за этим должно что-то стоять.
www.motogp-news.ru
В этой статье объясняются некоторые преимущества обратного направления вращения моторов и винтов в коптерах.
Оригинал: Reversed Motor/Prop Rotation in a Quadcopter
Одно из самых важных преимущество изменения направления вращения винтов — улучшенная аэродинамика. В этом видео (англ.) очень подробно объясняется получаемый эффект. Ниже мое понимание этого процесса.

Когда винт вращается как отдельный стационарный объект, точка приложения силы тяги находится прямо на оси вращения винта. Когда коптер летит вперед, воздух влияет не только на коптер, но и на винт, т.е. смещает эту точку в сторону лопасти, которая движется против движения коптера (красный круг на картинке).
Это значит, что лопасть, которая движется вперед дает больше тяги, и гонит воздух сильнее, чем лопасть, которая движется назад.
На передних винтах точка куда прикладывается сила смещается наружу, а у задних — внутрь. Чем быстрее коптер движется, тем сильнее смещается эта точка. Из-за меньшего рычага, задние винты будут работать менее эффективно, чем передние.
Более того, турбулентность, возникающая из-за передних винтов снижает эффективность задних (одна из причин, почему рама в виде растянутого креста более эффективна в этом плане — передние винты удалены от задних).
При изменении направления вращения винтов, точка приложения тяги передних винтов смещается внутрь, а задних — наружу, таким образом компенсируется потеря эффективности из-за турбулентности от передних винтов.
При обратном вращении винтов, на резких разворотах, скорость вращения винтов (за счет вращения каптера) не уменьшается.
Все эти преимущества не дадут ничего при обычном висении и в 3D акробатике.
Этих преимуществ будет достаточно чтобы все же решиться использовать обратное направление вращения.
Из-за того, что передние винты будут вращаться не внутрь, а «наружу», то FPV камера будет собирать меньше пыли и грязи (однако грязь будет собирать ПК) 🙂
Также при использовании реверсированного вращения меньше шансов (теоретически) запутаться в тряпичных воротах.
Еще один плюс в том, что большинство из нас часто ломают CW или CCW винты и одного вида винтов остается небольшой запас. Это происходит потому, что мы левши или правши, и инстинктивно по-разному выполняем левые и правые повороты. Теперь мы можем поменять направление вращения и продолжить летать (чаще ломая те винты, которых у нас больше 🙂 прим. перев).
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
set yaw_motor_direction = -1save
Обновление (спасибо FEI): В BF 3.2. формат команды изменился:
set YAW_MOTOR_REVERSED=ONsave
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
blog.rcdetails.info
Союз Советскиз
Социалистических
Республик
ОП ИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
{ii) 744838 (61) Дополнительное к авт. свид-ву
I (22) Заявлено 300378 (21) 2595751/24-07 с присоединением заявки №(23) Приоритет
Опубликовано 300680. Бюллетень ¹,24
Дата опубликования описания 300680 (51)М. Кл.2
Н 02 Н 7/97
Государственный комитет
СССР по делам изобретений н открытий (53) УДК 621. 316. .925(088.8) (72) Автор изобретения
А. И. Агафонов (71) Заявитель (54) УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ТРЕХФАЗНОГО
ЭЛЕКТРОДВИГАТЕЛЯ ОТ ВРАЩЕНИЯ В ОБРАТНОМ
НАПРАВЛЕНИИ
Изобретение относится к электротехнике и может быть использовано в электроприводе там, где требуется точное соблюдение направления вращения трехфазного двигателя, напри- 5 мер определенное направление вращения асинхронного двигателя пакета дисков или барабанов накопителей на магнитных дисках или барабанах,так как в них плавающий элемент магнит- 10 ной головки сориентирован только на определенное направление вращения магнитоносителя.
Известно, что направление вращения трехфазного электродвигателя 15 определяется последовательностью подключения фаз трехфазной сети переменного тока. Различают при этом прямую и обратную последовательность фаз, а с ней и прямое и обратное на- 20 правление вращения трехфазного электродвигателя. Устройства для определения последовательности чередования фаз (а с ней и направления вращения двигателя) в электротехнике 25 известны еще как фильтры напряжения обратной последовательности.
Известно устройство для защиты электродвигателя в случае случайного изменения направления вращения, кото-30
2 рое содержит датчики (трансформаторы тока) с выпрямителями, схему выдержки времени, пороговый элемент, стабилизирующий элемент и транзисторный усилитель с исполнительным реле fi) .
Работа устройства основана на резком увеличении тока через обмотку двигателя при случайном изменении направления вращения его.
Недостатки устройства — значительные габариты из-за наличия трансформаторов тока, размеры которых растут с увеличением мощности двигателя, значительная мощность потребления и необходимость блокировки защиты при пуске электродвигателя, так как сигнал на выходе трансформатора зависит от тока в цепи обмотки двигателя.
Известно устройство для блокировки обратного хода синхронного микродвигателя, в котором используются стопорные шарики и элемент в виде профилирующей поверхности с блокирующими выступами для стопорных шариков (2j .
Недостатком устройства является возможность применения его только для маломощных электромашин из-за трудности обеспечения необходимой механической прочности для более
744838 мощных электромашин. Кроме того, более мощные электромашины не могут находиться длительно в заторможенном состоянии из-за перегрева обмоток. Устройство имеет низкую надежность.
Известно также устройство, содержащее фильтр напряжения обратной повледовательности, подключенный к фазам питающей сети с исполнительным элементом на выходе (31 .
Однако работоспособность устройства зависит от колебаний частоты питающей сети (изменяется величина реактивного сопротивления и происходит нарушение заданных соотношений между активными и реактивными сопротивлениями), от перекоса напряжений фаз, от неточности подбора сопротивлений пдеч (особенно реактивного), от изменения величин сопротивлений при климатических воздействиях, что и приводит к появлению значительной величины напряжения небаланса. Кроме того, устройство имеет значительные габариты.
Наиболее близким к изобретению по технической сущности является устройство, содержащее элемент, чувствительный к сдвигу фаз питающего напряжения с исполнительным элементом на его выходе. Фазочувствительный элемент выполнен на тиристорах f4).
Однако данное устройство имее .-. большие габариты и потребление и обладает недостаточной надежностью.
Цель изобретения — устранение зависимости устройства защиты от колебания частоты питающей сети, перекоса фаз, уменьшения габаритов, потребляемой мощности и в итоге существенное повышение надежности.
Указанная цель достигается тем, что в устройстве для защиты трехфазного электродвигателя от вращения в обратном направлении, содержащем фазочувствительный элемент,. подключенный входами к фазам сети, и исполнительный элемент, подключенный к его выходу, фазочувствительный элемент выполнен в вице трех преобразователей синусоидального сигнала в серию прямоугольных импульсов, соединенных попарно с соответствующими входами трех логических элементов И, при этом выход первого логического элемента И соединен с первым входом триггера, выход второго элемента И соединен со вторым входом триггера, а выход третьего элемента И соединен с первым входом четвертого логического элемента И, второй. вход которого подключен к выходу триггера.
На фиг. 1 представлена блок-схема устройства, на фиг. 2 — времен ные диаграммы работы элементОв устройства при прямой последовательнос,ти чередования фаз, на фиг. 3 — то же, при обратной последовательности.
Устройство содержит подключенные своими входами 1, 2 и 3 к соответствующим фазам питающей сети три преобразователя 4, 5 и 6 синусоидалЬного сигнала фаз сети в серию прямоугольных импульсов, логические элементы И 7, 8 и 9, триггер 10, логический элемент И 11, исполнительный элемент 12. На входы 1, 2 и 3 преобразователей 4, 5 и 6 поступают синусоидальные напряжения фаз в определенной последовательности.
Устройство работает следующим образом.
На вход 1 поступает напряжение фазы й, на вход 2 — напряжение фазы Н, на ьход 3 — напряжение фазы С.
С выходов преобразователей 4, 5 и 6 сигналов выдаются серии импульсов соотвественно U4, U>, U длительностью импульсов 1/2 Т и периодом повторения T. Серии импульсов U4, U, Нь поступают попарно на соответствующие входы логических элементов
И 7, 8 и 9. На входы логического элемента И 7 поступают серии импульсов с выходов преобразователей 4 и
5, на входы элемента И 8 — серии импульсов с выходов преобразователей 5 и 6 и на входы элемента И 9 с выходов преобразователей 6 и сигналов. С выходов логических элементов И 7, 8 и 9 выдаются серии импульсов соответственно U, U e, U длительностью 1/В Т, следующих друг за другом и смещенных относительно друг друга на 1/6 T. При этом серия импульсов с выхода логического элемента И 7 взводит триггер 10 в положение "1", серия импульсов с выхода элемента И 8 сбрасывает триггер 10 в положение 0". С единичного выхода триггера 10 выдается серия импуль— сов Ut длительностью 1/3 Т. Серия импульсов U„ с выхода триггера 10 и серия импульсов Озс выхода логического элемента И 9 поступают на входы логического элемента 11. Как видно на временной диаграмме эти серии импульсов приходят на логический элемент И 11 в разное время, в результате чего на выходе элемента
И 11 серия импульсов отсутствует. исполнительный элемент 12 не срабатывает и тем самым разрешается вращение электродвигателя в прямом направлении.
На фиг. 3 представлены временные диаграммы работы элементов устройства при подаче на входы 1, 2 и 3 напряжений фаз А, Б и С сети в обратной последовательности. Работа элементов
4, 5, 6, 7, 8 и 9 происходит аналогично описанному выше. Отличие заключается в нарушении очередности следования серий импульсов на выходе элементов И 7, 8 и 9. Здесь серии 744838
ß3 с импульсов следуют в такой последовательности: серия импульсов U серия импульсов 0й и серия импульсов Ug. Серия импульсов U> с выхода логического элемента И 7 взводит триггер 10 в положение "1". Серия
5 импульсов Uy с выхода логического элемента И 9 поступают на вход элемента И 11, на втором входе которого в этот момент с выхода триггера 10 поступает "1". Последним приходит импульс серии 08 на сброс триггера
10. И так цикл работы повторяется.
В результате на выходе элемента И
11 выдается серия импульсов UH, которая вызывает срабатывание исполнительного элемента, запрещая вращение электродвигателя в обратном направлении. В качестве исполнительного элемента может быть использован триггер.
Суммарные габариты элементов 20 данного устройства намного меньше габаритов известного.
Мощность потребления также существенно меньше.
Работоспособность устройства не Я5 зависит от колебаний частоты сети, o ã перекоса напряжений фаз сети.
Формула изобретения
Устройство для защиты трехфазного электродвигателя от вращения .в обратном направлении, содержащее фазочувствительный элемент, подключенный входами к фазам сети, и исполнительный элемент, подключенный к его выходу, о т л и ч а ю щ е е с я тем, что, с целью повьааения надеж- ности, уменьшения габаритов и потребления, фазочувствительный элемент выполнен в виде трех преобразователей синусоидального сигнала в серию прямоугольных импульсов, соединенных попарно с соответствующими входами трех логических элементов И, при этом выход первого логического элемента И соединен с первым входом триггера, выход второго элемента И соединен со вторым входом триггера, а выход третьего элемента И соединен с первым входом четвертого логического элемента И, второй вход которого подключен к выходу триггера.
Источники информации, принятые во внимание при экспертизе
1. Заявка Франции 9 2266344, кл. H 02 Н 7/97, 1975.
2. Заявка ФРГ М 2124012, кл. H 02 Н 7/97, 1973.
З.Чернобровов H. Ф. Фильтр напряжения обратной последовательности.—
"Релейная защита". М., "Энергия", 1971. с. 169-172.
4. Авторское свидетельство СССР
Р 579675, кл. Н 02 H 7/09, 1976.
744838
aaZ
ЦНИИПИ Заказ 3829/20
Тираж 783 Подписное
Филиал ППП Патент, r. Ужгород, ул . Проектная,4




www.findpatent.ru
Для начала немного теории.
Так как же все-таки работает связка бесколлекторный мотор + регулятор? С коллекторными моторами, вроде бы, все понятно: жестко соединенный с ротором двигателя коллектор вращается между двух неподвижных щеток, таким образом ток подается на нужные обмотки синхронно с вращением ротора.
Примерно тем же занимается и бесколлекторный регулятор скорости. Вот только проблема в том, что регулятор не знает, в каком положении находится ротор двигателя, когда тот остановлен. Узнать это он может только по наведенной ЭДС в одной из фаз, проходящей в данный момент через ноль. Но чтобы получить наведенную ЭДС, нужно изменяющееся магнитное поле, т.е. вращающийся ротор двигателя. Замкнутый круг получается: Чтобы запустить двигатель, нужно узнать положение ротора, а чтобы узнать положение ротора, нужно запустить двигатель...
Бездатчиковые регуляторы на момент старта просто выдают по всем фазам серию импульсов, чтобы хоть как-то сдвинуть с места ротор и таким образом "увидеть" его положение. После этого регулятор уже сможет подключать нужные обмотки в нужный момент и поддерживать вращение ротора. Отсюда и несколько затянутый и дерганый старт по сравнению с коллекторными двигателями. Еще один недостаток - не очень стабильная работа на малых оборотах: наведенное в обмотках напряжение настолько низкое, что контроллер регулятора не всегда способен его различить, и появляется риск срыва синхронизации.
Чтобы избавиться от этих недостатков, на некоторых моторах устанавливают магнитные сенсоры. По сути, сенсор и регулятор хода образуют бесконтактный коллектор, все так же жестко привязанный к физическому расположению обмоток. Теперь регулятору не нужно заниматься рассчетами и угадыванием положения ротора - он точно знает, на какие обмотки и какой полярности нужно подавать напряжение, если сработал тот или иной датчик.
Вроде бы все прекрасно: и мотор стабильно работает во всем диапазоне оборотов, и срывы синхронизации просто невозможны, как и на коллекторниках... Но при этом приходится тщательно следить за правильностью подключения датчиков и обмоток двигателя: иначе, если, например, срабатывает датчик А, а запитывается обмотка С, то двигатель просто не сможет работать.
На модельных моторах разъем сенсора делают такой, чтобы неправильно подключить его было невозможно. Фазы двигателя и регулятора подписывают, строго определяя один-единственный правильный вариант подключения. Более-менее серьезные производители автомоделей учитывают стандартное направление вращения сенсорных двигателей и с их шасси, обычно, проблем не возникает.
Но что делать, если собственноручно модернизированная модель какого-нибудь малоизвестного производителя вдруг, вместо того, чтобы ехать вперед, рванула задним ходом? На бездатчиковых моторах просто поменял любую пару фаз местами, и порядок, но с сенсором такое не проходит. А исправить ситуацию механически (например, перевернув диффиренциалы) далеко не всегда позволяет конструкция шасси... Не отказываться же теперь от преимуществ сенсора?
Конечно нет! Логичное решение - вместе со сменой фаз, поменять местами и пару соответствующих датчиков.
А посему, переходим к практической части.
Нашими подопытными будут сенсорный двигатель Turnigy Mach4 10.5T kv3600 и регулятор HobbyKing X-Car 60A.



Двигатель, кстати, внутри совсем не такой хороший, как выглядит снаружи. Чего стоят только зазоры в несколько миллиметров между статором и магнитом ротора...

Такое ощущение, что в корпус 540-го мотора засунули ротор от 380-го. Ротор не отбалансирован, подшипники люфтят (хотя, справедливости ради, стоит сказать что смазка в них имеется в достаточном количестве), работает мотор шумно... В общем, я ждал от него большего.
Но вернемся к сенсору.

Ничего "космического" - 3 датчика Холла, небольшой конденсатор и резистор на 10кОм. Проследив дорожки до разъема, я набросал такую вот схему:
Расположение датчиков на схеме примерно соответствует их физическому размещению в корпусе мотора, если смотреть на него со стороны задней крышки. Вместо резистора, насколько я понял, должен был стоять термодатчик, но китайцы решили сэкономить...
Теперь попробуем заставить мотор крутиться в противоположную сторону. Я менял местами фазы А и С.
С отключенным сенсором, как и ожидалось, никаких проблем - мотор запустился в обратную сторону. Но с сенсором он только дергался, грелся, но работать не хотел... Тоже вполне ожидаемо.
Теперь нужно было подобрать правильную последовательность датчиков. Мне повезло - попал с первого раза, поменяв местами 3 и 5 провода на сенсорном разъеме, т.е., в данном случае, белый и желтый провода:

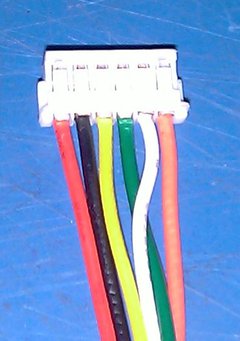
Результат не заставил себя ждать: мотор бодренько закрутился в обратную сторону!
Ура! Победа!!!
Победа, да не совсем. Работал мотор не очень ровно и умудрялся греться даже совсем без нагрузки. Причина такого поведения - неправильный тайминг. Он-то был настроен на заводе с рассчетом на вполне определенное направление вращения.


Обратите внимание, что датчики Холла расположены не точно по центру "зубов" статора или строго между ними, а сдвинуты к одному из краев "зуба". Именно этот угол и определяет "опережение зажигания", в смысле, тайминг. Более стабильная работа мотора получалась при повороте задней крышки против часовой стрелки, т.е. датчики смещались ближе к противоположному краю "зуба" статора.

Но так как конструкция задней крышки данного конкретного двигателя не позволяет повернуть ее на достаточно большой угол, а тем более закрепить ее в таком положении, длительных тестов с подбором тайминга я не проводил. Так что, тут еще остается пространство для экспериментов.
www.parkflyer.ru