Сборочные манипуляторы становятся основным средством автоматизации производства на этапе сборки товаров из готовых деталей. Самые первые промышленные роботы этого типа работали от системы объемного гидропривода. Эта схема не обладала большой надежностью. Требовался гидронасос, фитинги, гибкие сочленения. Самым надежным приводным средством является электродвигатель. Для сборочных манипуляторов оптимально походит шаговый двигатель. Он обладает большим крутящим моментом с низкой скоростью вращения.
В сборочных манипуляторах нужно обеспечивать поступательное движение. Именно этим объясняется применение гидроцилиндров. Для сокращения количества деталей и повышения надежности гидроцилиндры заменяются на гидротолкатели. Работают они по такому же принципу, но гидронасос с приводным электродвигателем установлен в одном корпусе толкателя. Надежность этих систем высокая. Гидротолкатели применяются для рулевого привода в пассажирских самолетах. Недостаток данного решения — развиваемое усилие только одностороннее. Как вариант можно предложить применение шагового двигателя с зубчатой рейкой. Это решение используется все более широко.

Рабочие элементы должны обеспечивать захват детали с конвейера, ее перенос на изделие и закрепление винтами, клеем или термически. Для привода рабочих элементов тоже очень удобен именно шаговый электродвигатель. Помимо высокого крутящего момента он позволяет поворачивать вал с приводным механизмом на определенный угол, а также работать в обе стороны вращения. Для сборочных захватов рабочих органов, работающих циклически, это очень важное качество. Чтобы это обеспечить шаговому двигателю необходимо специализированное управление
Шаговые электродвигатели имеют несколько десятков полюсов. Чем их больше — тем выше точность выставления угла вала. Для работы такой приводной схемы необходим блок питания, обеспечивающий последовательную подачу напряжения на обмотки полюсов. Здесь используются простые унифицированные варианты, подходящие для многих моделей.
Точная подача фаз, управление скоростью и контроль угла поворота вала возможны только в системах с обратной связью. Для контроля оборотов и определения угла используются оптические бесконтактные энкодеры. Все это подключается к управлению к промышленному логическому контроллеру.
sxteh.ru
Еще советы о том, как работать на КМУ нашел на одном сайте
Безопастность и особенности работы с грузом на кране-манипуляторе
В любое время года защищайте неприкрытые узлы и агрегаты КМУ от попадания влаги, в особенности редуктор лебедки (следите за целостностью корпуса, т.к. трещину обнаруживают, только когда редуктор ломается от попадания влаги в масло) и поворотный редуктор башни (особенно эта «болезнь» марки «Tadano», при попадании влаги через сальник разбивается подшипник и, в конечном итоге, дорогой вал привода башни с зубьями ОПП)!
Выдвиньте ту опору КМУ, со стороны которой собираетесь поднимать груз, немножко повыше по сравнению с другой.
Обязательно подкладывайте под опоры подставки, и чем рыхлее грунт под опорами, тем больше по площади они должны быть!
Никогда не начинайте движение на самопогрузчике, не отключив КОМ (Коробку отбора мощности - привод крана манипулятора)!
Чаще смазывайте тавотницы КМУ, трос, задвигающиеся секции стрелы и опор!
На максимальном вылете не поднимайте груз сразу, попробуйте сначала медленно приподнять (важно не упустить момент, после которого стрела может сломаться, он хорошо ощутим по «звенящему напряжению»).
Если приходится работать с предельно допустимыми по весу грузами, старайтесь стрелу держать на максимальном градусе подъема (т.е. поднять ее как можно выше) и для подъема / опускания груза пользуйтесь лебедкой (для телескопических КМУ, естественно), а не стрелой!
Следите за состоянием подшипников роликов стрелы и шахт опор (могут подвести в самый неподходящий момент), регулярно смазывайте их!
Держите запасной НШ наготове (аксиально-поршневые гидромоторы ломаются значительно реже), иначе трудно будет даже сложить кран манипулятор для отъезда к месту ремонта. Не работайте долго при высоких оборотах двигателя, особенно если насос – шестеренный (НШ) (можете «вскипятить» гидравлическое масло и погубить все РТИ гидросистемы КМУ)! Полностью разматывая трос, следите, чтобы смотан он был в правильном направлении (т.е. как и был, иначе неизбежны рывки при работе, скручивания, закусывания и т.д.)! При необходимости работы КМУ на холоде (а ниже -20? С работать не рекомендуется производителями КМУ) хорошенько разогрейте масло в гидросистеме, для чего включите КОМ (только при этом не трогать рычаги управления манипулятором, иначе можно выдавить манжеты или уплотнительные кольца гидроцилиндров!) и на холостом ходу подождите 15-20мин. Чтобы убедится в том что масло прогрето, осторожно прикоснитесь к маслянному фильтру Не «волоките» груз лебедкой или стрелой (при этом сразу повреждаются ролики, подшипники роликов, а в худшем случае и направляющие стрелы)! При работе помните, что чем больше «рычаг» стрелы, тем проще завалить автомобиль на бок (не экономьте на дополнительных задних опорах, особенно при длине стрелы 9м и выше)! Не тяните с ремонтом «текущих» и «потеющих» гидроцилиндров (манжеты и уплотнительные кольца перестают держать при пиковых нагрузках, т.е. в самый опасный и ответственный момент)!
Помните, что профилактика всегда дешевле ремонта (и это не считая потери прибыли от ремонтного простоя)!
kmuclub.ru
ООО «КранТракСервис» рекомендует перед эксплуатацией КМУ тщательно изучить руководство по эксплуатации крана манипулятора. При изучении и эксплуатации КМУ необходимо дополнительно использовать ПБ 10-257-98 «Правила устройства и безопасной эксплуатации грузоподъемных кранов-манипуляторов.Правильная эксплуатация обеспечивает бесперебойную и безотказную работу краноманипуляторных установок.Невнимательность при операциях настройки (проверки) может повлечь сбои в работе крана манипулятора и аварийные ситуации. Не проводите установку и переоборудование КМУ самостоятельно.Кран-манипулятор предназначен для производства погрузо-разгрузочных и строительно-монтажных работ. Пример общего вида КМУ представлен на рис.1.

При эксплуатации крана манипулятора запрещается:
1.1. При выдвижении стрелы необходимо увеличить длину троса с крюком. 1.2. При подъеме груза, по массе близкого к максимальному для данного вылета, оператор должен проверить устойчивость крана-манипулятора и правильность строповки груза путем его поднятия на высоту 0,1-0,2 м. Когда груз будет оторван от земли, остановите на время подъем, чтобы удостовериться в том, что груз держится горизонтально, автомобиль сохраняет устойчивость и подвешенный на тросе груз, расположен должным образом. Только после этого начинайте подъем груза. При опускании груза, перед контактом с землей, необходимо снизить скорость опускания груза.1.3. При поворотах колонны КМУ не используйте больших скоростей, во избежание динамических нагрузок и увеличения рабочего радиуса.1.4. Не находитесь между стрелой и платформой автомобиля и не кладите руки и не облокачивайтесь на движущиеся части крана манипулятора.1.5. При опускании крюка ниже уровня земли скорость – медленнее, и необходимо убедиться, чтобы на барабане оставалось более 3-х оборотов (витков) троса.1.6. Трос не должен травиться без необходимости, чтобы избежать неравномерного наматывания троса вокруг барабана. Наматывание первого слоя троса вокруг барабана должно быть надежным и плотным.1.7. Не дотрагивайтесь до масляного бака гидросистемы при работе КМУ, т.к. бак нагревается.1.8. При достижении температуры масла гидросистемы 80 град С прекратите работу КМУ. Повышение температуры масла в гидросистеме может повредить магистраль высокого давления и уплотнения.
Запрещается работа КМУ:- С неисправным звуковым сигналом и приборами безопасности.- С грузами при положении стрелового оборудования над кабиной базового автомобиля.- На площадке, уклон которой более 3 град С, с максимальным для данного вылета грузом.- В закрытых невентилируемых помещениях (из-за загазованности воздуха).- При скорости ветра свыше 10 м/с, при грозе и шквальном ветре.- В ночное и вечернее время без электрического освещения.- Если температура воздуха ниже -25 и выше +40 град.
Во время работы на гидроманипуляторе запрещается:- Поднимать груз, масса которого превышает номинальную для данного вылета стрелы.- Поднимать груз, масса которого неизвестна.- Резко тормозить груз при выполнении рабочих операций.- Отрывать посредством КМУ груз, засыпанный грунтом или другими предметами, а также примерзший груз.- Подтягивать груз строго запрещается.- Находится на поднимаемом грузе или цепляться за крюк.- Стоять под поднимаемым грузом.- Самостоятельно проводить ремонт крана манипулятора и регулировку.- Убирать аутригеры, когда груз поднят или стрела выдвинута.- Оставлять место работы, когда груз поднят.- Допускать к строповке груза посторонних лиц.
2.1. Установка КМУ за кабиной автомобиля.Руководство по эксплуатации заключает в себе описание исполнения монтажа за кабиной. При монтаже в среднем положении, в котором кран манипулятор смонтирован посередине кузова автомобиля, и при монтаже КМУ сзади, когда крановая установка смонтирована в задней части кузова автомобиля, возможности каждого крана-манипулятора отличаются от описанной в этом руководстве.2.2. Подъем груза при направлении стрелы вперед.Работа КМУ в области около кабины схематично показана линиями ведущими от центра поворота крановой установки к центру обоих опор (аутригеров), как показано на схеме.

2.3. Подъем груза краном манипулятором при направлении стрелы в сторону – работа КМУ, направленной стрелой в сторону, схематично показана линиями, ведущими от центра крановой установки к центру обоих задних колес автомобиля, как показано на схеме.2.4. Подъем груза манипулятором при направлении стрелы назад – работа КМУ, направленной в сторону кузова, ограничена линиями, проведенными от центра поворота КМУ, к центрам задних колес автомобиля, как показано на схеме.2.5. Номинальный вес грузакрановой установки – это тот вес, который может быть поднят тяговым усилием лебедки КМУ.2.6. Грузоподъемность гидроманипулятора – максимальный вес поднимаемого груза, включающий в себя вес крюка и строп, который может быть поднят (в соответствии с углом стрелы и длиной стрелы), усилием крановой установки.2.7. Рабочий радиус КМУ – расстояние в горизонтальной плоскости от центра поворота КМУ до точки проекции крюка на горизонтальную плоскость.2.8. Длина стрелы крана манипулятора – расстояние от оси подъема стрелы до оси шкива в оголовке стрелы.2.9. Угол подъема стрелы крана-манипулятора – угол наклона стрелы крана манипулятора к горизонту.2.10. Высота подъема груза манипулятором – расстояние по вертикали между нижней частью крюка и землей.

2.11. Установка аутригеров (выносных опор) крана манипулятора – аутригеры позволяют удерживать в устойчивом положении кран-манипулятор во время работы КМУ. Они могут быть выдвинуты в три положения: минимальное, среднее, максимальное. Аутригеры состоят из двух частей, горизонтальной и вертикальной.2.12. Секции стрелы КМУ - описание каждой секции стрелы показано на рисунке. Для одновременного телескопирования стрелы, метками обозначаются промежуточные секции стрелы, показывая возможности крановой установки при каждой выдвинутой секции на полную длину.


Точка А относится к углу стрелы. Точка В относится к подъему стрелы над землей.Рабочая область не включает в себя сдвиг, перемещение, происходящее в результате отклонения стрелы.Действительный рабочий радиус при подъеме груза будет увеличиваться в результате отклонения стрелы.

3.1.Назначение рычагов управления КМУ.Типовое размещение рычагов управления крана манипулятора показано на рисунке, на примере крана-манипулятора UNIC:

3.2. Шкала грузоподъемности крана манипулятора (с указателем угла наклона).Шкала показывает соотношение вылета стрелы, угла ее наклона и допустимой грузоподъемности. Шкала грузоподъемности показывает нагрузку, которая больше рассчитана на возможности крановой установки, чем на ее устойчивость. Градация на шкале индикатора нагрузки меняется соответственно с количеством секций стрелы и загрузкой транспортного средства.Для обеспечения безопасности, когда стрела выдвинута наполовину, используйте показания на шкале, соответствующие полному выдвижению стрелы.- Когда выдвинута вторая секция из первой секции, используйте показания для 1+2 секций.- Когда выдвинута 3-я секция из второй, используйте показания для 1+2+3 секций.- Когда покажется метка на боковой стороне 3-й секции выдвинутой из второй секции, используйте показания для 1+2+3+4 секций.Рабочий радиус увеличивается в результате отклонения, прогиба стрелы, когда груз начинает подниматься, установите угол стрелы так, чтобы крюк был максимально приближен к внутренней стороне стрелы.

3.3. Индикатор грузоподъемности крана манипулятора.Индикатор показывает вес поднимаемого груза только во время отрыва груза. Так как циферблат индикатора вращается вокруг соей оси, поворачивая его, можно обеспечить чтение показаний от установленного положения.
 крана манипулятора / www.kran-ts.ru")
Циферблат индикатора имеет шкалу соответствия положений А и В указателя грузоподъемности для тросовой системы подвеса крюка гидроманипулятора:- «В» шкала для системы подвеса на одном тросе;- «А» шкала для системы подвеса на четырех тросах.Для измерения веса поднимаемого груза следуйте приведенными ниже рекомендациям.Сравните показания на индикаторе с показаниями шкалы грузоподъемности, расположенной на стреле. У весов есть две стрелки. Считывайте вес груза по каждой стрелке: шкала «А» для красной стрелки и шкала «В» для белой стрелки.

Рекомендации для безопасной работы.- Если КМУ нагружена настолько, что показания на индикаторе достигают номинальной нагрузке, крановая установка может быть повреждена или опрокинута. В этом случае переместите транспортное средство по направлению к поднимаемому грузу, чтобы уменьшить рабочий адрес.- Когда индикатор показывает значение меньше, чем обозначено в диаграмме номинальной нагрузки, груз может быть поднят безопасно.
3.4. Автоматический акселератор.КМУ оборудована автоматическим акселератором для регулирования скорости подъема стрелы, сматывания / наматывания троса крюка, телескопирования стрелы и поворота колонны. Скорость работы может свободно меняться от медленной до высокой и регулироваться отдельными рычагами.Рычаг акселератора:
 крана манипулятора / www.kran-ts.ru")
Перед началом и по завершении рабочих операций переключите рычаг акселератора в положение малой (низкой) скорости, это позволит избежать рывков при работе КМУ.
4.1. Подготовка крана-манипулятора перед началом работы.Перед началом работы на кране манипуляторе проверьте:- уровень масла в гидросистеме (по указателю уровня на маслобаке). Количество масла проверяется при транспортном положении КМУ. Уровень масла должен находится между нижним и верхним краем окна маслоуказателя;- внимательно проверьте состояние крюка, каната, грузозахватных приспособлений и их крепление.Перед началом работы выполните следующие подготовительные операции:а). Проведите ежесменное техническое обслуживание КМУ (ЕО) перед выездом из парка.б). Убедитесь, что рабочая площадка горизонтальна, уклон не превышает 3 град., а покрытие площадки выдержит давление выносных опор и колес транспортного средства при работе. В противном случае подготовьте необходимые подкладки.в). Выполните операции, связанные с фиксацией транспортного средства (в случае установки КМУ на автомобильном шасси: убедиться, что давление в шинах колес соответствует норме, поставить на автомобиль на стояночный тормоз).г). Запустить двигатель, отрегулировать обороты, выключить сцепление, включить коробку отбора мощности (КОМ), включить сцепление. ВНИМАНИЕ! не допускается включение коробки отбора мощности без выжима сцепления.д). Выдвиньте выносные опоры и перемещением соответствующих рукояток гидрораспределителя установите аутригеры до соприкосновения подпятников с опорной поверхностью. В случае необходимости (рыхлый, слабый грунт) обязательно используйте подкладки.Примечание:Перед началом работы следует выполнить несколько манипуляций КМУ без нагрузки на небольших скоростях рабочих движений (подъем-опускание стрелы, поворот, телескопирование), с целью проверки работоспособности и разогрева рабочей жидкости до оптимальной температуры. Температура масла должна составлять + 45°С - +55°С. Когда температура масла опускается, скорость рабочих движений КМУ понижается ввиду повышения вязкости масла. В зимнее время года прогревать масло особенно важно для нормальной работы гидравлической системы:- при температуре ниже - 10° С после включения гидронасоса прогрейте рабочую жидкость в системе на холостом ходу в течение 5 – 10 мин;- поочередно включайте механизмы крана-манипулятора в обоих направлениях без нагрузки в течение 3-5 минут;- прогрев можно ускорить, включив какую-либо функцию. Например, перевести рукоятку управления телескопированием секций стрелы на втягивание и подержать ее в течение 2-3 минут, чтобы жидкость перетекала в бак через предохранительный клапан.Примечание: Вязкость масла в гидросистеме КМУ увеличивается в зимний период или при низких температурах окружающей среды. При таких условиях эксплуатации КМУ функции наматывания крюка или вытягивания стрелы могут не обеспечить нормальную остановку движущихся частей. Когда масло холодное, происходит незначительное перемещение после срабатывания концевого датчика. Это не является неполадкой. Автоматика начинает работать штатно, когда температура масла в гидросистеме достигает необходимого значения.4.2. Порядок работы и основные операции при работе на гидроманипуляторе.Порядок установки аутригеров КМУ:1). Освободите запирающий рычаг (стопор).2). Удерживайте выдвижной рычаг нажатым при выдвижении аутригеров.3). Положение первой остановки, будет обозначено первой меткой. Когда опоры полностью выдвинуты, с каждой стороны горизонтальной части аутригера появляется вторая метка.

4). Проверьте фиксацию выдвижения опор.5). Переместите рычаги управления аутригерами в положение «Выдвижение» для выдвижения вертикальных частей опор. 6). Переместите рычаги управления аутригерами в положение «Втягивание» для втягивания вертикальных частей опор.7). Верните рычаг в нейтральное положение «Остановка» для остановки выдвижения или втягивания опор.

Примечание:Производить установку выносных опор следует, придерживаясь следующих правил:- Устойчивость при работе определяется степенью выдвижения горизонтальных брусьев выносных опор: при неполном выдвижении устойчивость снижается вследствие уменьшения опорного контура.- Тщательно отрегулируйте горизонтальное положение по указателю крена.- Следите, чтобы колеса автомобильного шасси не отрывались от земли, воспринимая часть нагрузки - при полном вывешивании на опоры не исключена неравномерная динамическая нагрузка на гидроцилиндры опор, что может привести к выходу их из строя.Внимание! Выдвигайте аутригеры на максимальную длину при работе крана манипулятора.
Порядок работы со стрелой крана манипулятора.Рабочий цикл КМУ включает следующие рабочие операции:- подъем-опускание стрелы;- выдвижение-втягивание секции (секций) телескопирования;- подъем-опускание груза с помощью лебедки;- поворот колонны.Выполнение каждой из указанных операций осуществляется перемещением соответствующей рукоятки управления гидрораспределителем в ту или другую сторону от нейтрального положения.Рычаги управления выполнены с самовозвратом: при прекращении воздействия возвращаются в исходное положение, движение исполнительного механизма прекращается. Угол отклонения рычага определяет скорость движения исполнительного механизма.Движение механизма прекращается при возвращении рукоятки управления в нейтральное положение.Зоны работы с определенными грузами для стрелового оборудования ограничены кривыми грузовысотных характеристик КМУ, приведенных на КМУ. В указанных зонах разрешается производить движение любым элементом стрелового оборудования. Скорость выполнения рабочих операций регулируется ходом рукояток управления распределителем. Работа с предельным для данного вылета грузом должна проводиться на минимальной скорости.Подъем-опускание стрелы крана манипулятора.Примечание:Резкий рывок во время операции подъема груза, вызывает повышенную динамическую нагрузку на КМУ, которая может привести к повреждению крана манипулятора. Перемещайте рычаги управления медленно и плавно. Стрела, выдвинутая на большое расстояние, поднимает и опускает груз во время работы с большей скоростью, чем в сложенном состоянии. Поэтому перемещайте рычаги управления медленно. Когда опускаете стрелу с грузом, рабочий радиус увеличивается, а грузоподъемность уменьшается в соответствии с таблицей грузоподъемности. Считайте показания с датчика нагрузки для подтверждения безопасности работы перед тем, как опускать стрелу.Подъем стрелы КМУ: переместите рычаг по направлению к «RISE» чтобы поднять стрелу.Опускание стрелы КМУ: переместите рычаг по направлению к «LOWER» чтобы опустить стрелу.Остановка стрелы КМУ: верните рычаг в нейтральное положение, чтобы остановить работу стрелы.

Подъем-опускание крюка крана манипулятора.Проверьте, чтобы крюк не был перегружен. Удостоверьтесь, что включена звуковая сигнализация ограничителя подъема крюка. Удар крюка о верхний шкив стрелы может привести к повреждению троса и блока в оголовке стрелы и может явиться причиной падения груза.Подъем крюка гидроманипулятора: переместите рычаг по направлению к «UP», чтобы поднять крюк.Опускание крюка гидроманипулятора: переместите рычаг по направлению к «DOWN», чтобы опустить крюк.Остановка крюка гидроманипулятора: верните рычаг в нейтральное положение, чтобы остановить работу крюка.Примечание:Опускание крюка без груза или с грузом на землю ослабевает намотку троса, что может привести к неравномерной намотке и может привести к сокращению срока службы троса.Не разматывайте трос полностью, например, при опускании ниже уровня земли, удостоверьтесь, что на барабане остается всегда минимум 3 витка троса.Если первый слой троса будет намотан неравномерно, трос, наматываемый сверху этого слоя может попасть между витками первого слоя, что приведет к неравномерной намотке и рывкам троса во время работы.Когда трос размотан до первого слоя или намотан на первый слой, медленно намотайте / размотайте трос так, чтобы первый слой лег равномерно и плотно – виток к витку.

Выдвижение / задвижение (втягивание, телескопирование) стрелы КМУ.При выдвижении стрелы с крюком, близко расположенным к оголовку стрелы, крюк может удариться о вершину стрелы, что может привести к повреждению троса и катушки в в оголовке стрелы, и падению груза.

Выдвижение стрелы КМУ: Переместите рычаг вправо, чтобы выдвинуть стрелу КМУ.Втягивание (задвижение) стрелы крана манипулятора: Переместите рычаг влево, чтобы втянуть (задвинуть) стрелу крана манипулятора.Остановка движения стрелы: Верните рычаг в нейтральное положение для остановки процесса телескопирования стрелы КМУ.Примечание:Крюк поднимается к оголовку стрелы, когда стрела выдвигается, и опускается, когда стрела втягивается (задвигается). При работе стрелы на выдвижение / задвижение необходимо внимательно следить за положением крюка.Порядок выдвижения / задвижения секций стрелы в зависимости от их количества.Последовательность выдвижения секций стрелы.Выдвижение со стрелы начинается с секции наибольшего поперечного сечения.Последовательность задвижения (втягивания) секций стрелы КМУ.Задвижение (втягивание) стрелы начинается с последней секции, наименьшего поперечного сечения.На приведенных ниже схемах указан порядок выдвижения / задвижения секций стрелы КМУ, в зависимости от их количества.

Примечание:Если скорость телескопирования стрелы уменьшается из-за высокой вязкости масла при низких температурах окружающей среды, предварительно прогрейте масло в гидросистеме.Повороты стрелы крана манипулятора. Выполняйте работу по повороту стрелы на низких оборотах двигателя автомобиля.Начиная и заканчивая операции поворота стрелы, снижайте скорость поворота колонны.Резкое перемещение рычага с поднятым грузом, может привести к раскачиванию и столкновению груза с рядом стоящим объектами. Раскачивание поднятого груза увеличивает рабочий радиус КМУ, что может привести к перегрузке.При большом вылете стрелы и малом углу подъема стрелы манипулятора, рабочий радиус КМУ увеличивается и поднятый груз движется быстрее.Выполняйте повороты медленно. Повороты стрелы с поднятым грузом над транспортным средством спереди или сзади машины, сзади в сторону, или из стороны вперед или назад делает транспортное средство неустойчивым. В таких случаях - держите груз, как можно ближе к земле при повороте стрелы.

Поворот стрелы КМУ по часовой стрелке: Переместите рычаг в положение «по часовой стрелке», чтобы повернуть стрелу по часовой стрелке.Поворот стрелы КМУ против часовой стрелки: Переместите рычаг в положение «против часовой стрелки», чтобы повернуть стрелу против часовой стрелки. Остановка поворота стрелы манипулятора: Верните рычаг в обычное положение, чтобы остановить поворот стрелы КМУ. Для поворота по часовой стрелке – определено положение «направо» и против часовой стрелки соответственно - «налево». Установка аутригеров крана манипулятора в транспортное положение. Примечание:Убирать аутригеры можно только после того, как убрана стрела крана манипулятора.При неосторожном обращении с аутригерами есть риск, что Ваши пальцы могут быть защемлены, поэтому одной рукой держите рычаг, а другой рукой толкайте аутригер.Убедитесь, что нажали рычаг выдвижения опоры и медленно задвигайте аутригер.Заблокируйте полностью убранный (задвинутый) аутригер рычагом блокировки.- передвиньте контрольный рычаг аутригера в положение «направо», чтобы втянуть вертикальные части аутригера.- держите рычаг выдвижения нажатым, чтобы задвинуть горизонтальные части аутригера с каждой стороны, после того, как вертикальные части аутригера будут полностью втянуты.- после того, как все аутригеры полностью убраны, проверьте горизонтальные части аутригеров (выносные балки) прочно закреплены так, что они не выдвигаются в стороны от транспортного средства.- поверните запорный рычаг - для блокировки выносных балок опор.

Приведение крана манипулятора в транспортное положение.Примечание:Удостоверьтесь, что стрела, аутригеры и крюк закреплены и зафиксированы.Удостоверьтесь, что полностью убраны и закреплены детали аутригеров.Убедитесь, что детали аутригеров закреплены рычагом блокировки.Движение крана-манипулятора при недостаточно прочно закрепленной стреле, аутригеров, крюке может привести к несчастному случаю, повреждению деталей манипулятора или удара по транспортному средству, двигающемуся навстречу.Инструкция по приведению крана манипулятора в транспортное положение. Для приведения манипулятора в транспортное положение, необходимо:1). Втяните (задвиньте) стрелу гидроманипулятора.2). Переместите стрелу по направлению по ходу движения или назад. Остановите разворачивание стрелы в положение, в котором обе желтые метки совпадут.

3). Опустите стрелу до предела. Обратите внимание, чтобы крюк не ударял по кабине водителя, когда он располагается впереди или по кузову крана-манипулятора, если располагается сзади.4). Зачалите крюк на соответствующем месте крепления.5). Подтянуть крюк до натяжения чалки. Внимание! Не перетягивайте чалку, когда крюк крепится спереди крана-манипулятора. Это может послужить причиной прогиба рамы автомобиля или повредить бампер.6). Уберите с двух сторон транспортного вертикальные и горизонтальные части аутригера и зафиксируйте их.7). Убедитесь, что рычаг управления акселератором находится в положении самой низкой скорости.

8). Выключите звуковую сигнализацию ограничителя подъема крюка крана манипулятора.

kran-ts.ru
Изобретение относится к области сборочного производства и может быть использовано для сборки манипулятора, выполненного в виде корпуса с установленными в нем с возможностью вращения двумя ходовыми винтами, гайки которых связаны с подвижной платформой, предназначенной для размещения изделия и выполненной с возможностью поступательного перемещения по упомянутым винтам, концы которых соединены с валами шаговых двигателей с обмотками, подключенными к выходам многоканального блока управления. Для осуществления сборки двигатели фиксируют относительно корпуса, в который устанавливают ходовые винты с расположенными на них гайками, при этом подвижную платформу размещают на ходовых винтах вдоль одного из краев корпуса параллельно ему, а упомянутые гайки располагают напротив центра подвижной платформы без закрепления на ней. В этом положении упомянутых элементов шаговые двигатели подключают к блоку управления с возбуждением их одноименных фаз для синфазного углового положения ходовых винтов, при этом жестко скрепляют ходовые винты с валами шаговых двигателей, а упомянутые гайки - с подвижной платформой. Использование изобретения позволяет упростить процесс сборки указанного манипулятора с обеспечением при этом заданной точности его работы. 2 ил.
Предложение относится к области машиностроения и предназначено для автоматизации процесса перемещения изделий, в частности при электроннолучевой сварке.
Известен способ сборки электромеханического привода линейного перемещения с шаговым двигателем вращения (см. заявку РФ №93021003 от 22.04.1993, МПК В23Р 19/00).
Недостатком известного способа является его сложность и невозможность использования в двухдвигательных манипуляторах.
Также известен подвижный стол манипулятора, содержащий укрепленные в корпусе с возможностью вращения вокруг осей два параллельно расположенных винта, гайки которых жестко закреплены на поступательно движущейся платформе, несущей изделие, один конец каждого винта связан с выходным валом шагового двигателя, обмотки которого подключены к выходам многоканального блока управления (см. патент РФ на полезную модель №143440).
Недостатком данного устройства является то, что его сборка представляет большую сложность. Это связано с тем, что винты, связанные с валами шаговых двигателей, для обеспечения требуемой точности и исключения заклинивания передач винт-гайка, должны вращаться синхронно и синфазно. Синхронность и синфазность вращения винтов обеспечивается коммутацией фаз двигателей от одного коммутатора. Однако при этом установленные в корпусе винты, гайки которых жестко связаны с поступательно движущейся платформой, также должны быть установлены синфазно по отношению друг другу и валам шаговых двигателей. Даже при тщательной сборке обеспечить с требуемой точностью синфазность четырех подвижных элементов манипулятора практически невозможно.
Техническая задача, решаемая предлагаемым способом, состоит в упрощении процесса сборки манипулятора и обеспечении необходимой точности работы механизма. Технический эффект, используемый при решении поставленной технической задачи, заключается в обеспечении синфазности положений ходовых винтов, гаек и валов шаговых двигателей и достигается тем, что способ сборки манипулятора, выполненного в виде корпуса с установленными в нем с возможностью вращения двумя ходовыми винтами, гайки которых связаны с подвижной платформой, предназначенной для размещения изделия и выполненной с возможностью поступательного перемещения по упомянутым винтам, концы которых соединены с валами шаговых двигателей с обмотками, подключенными к выходам многоканального блока управления, характеризуется тем, что фиксируют упомянутые двигатели относительно корпуса, в корпус устанавливают ходовые винты с расположенными на них гайками, при этом подвижную платформу размещают на ходовых винтах вдоль одного из краев корпуса параллельно ему, а упомянутые гайки располагают напротив центра подвижной платформы без закрепления на ней, в этом положении упомянутых элементов шаговые двигатели подключают к упомянутому блоку управления с возбуждением их одноименных фаз для синфазного углового положения ходовых винтов, при этом жестко скрепляют ходовые винты с валами шаговых двигателей, а упомянутые гайки - с подвижной платформой.
Подвижную платформу перемещают (как правило, вручную) к одному (любому краю) корпуса манипулятора и устанавливают параллельно ему. В этом положении подвижной платформы к ней перемещают (путем поворота ходовых винтов) гайки, располагая их в центре платформы, но не закрепляя их на ней. В таком положении подвижной части механизма подключают шаговые двигатели к блоку управления и возбуждают их одноименные фазы, что обеспечивает синфазность положений винтов, гаек и валов шаговых двигателей. После указанной процедуры при возбужденных шаговых двигателях жестко закрепляют ходовые винты с валами шаговых двигателей, а корпуса гаек - с подвижной платформой. При указанной последовательности сборки манипулятора исключаются перекосы в его винтовых передачах, уменьшается трение в них и повышается точность передачи движения от шаговых двигателей к подвижной платформе.
Способ сборки поясняется чертежами, где на фиг. 1 приведена схема подвижной платформы в плане и функциональная схема устройства управления применительно к четырехфазным шаговым двигателям, а на фиг. 2 - схематичное расположение элементов подвижной платформы на виде спереди.
Манипулятор содержит укрепленные в корпусе 1 с возможностью вращения вокруг оси ходовые винты 2 и 3, гайки 4, 5 которых жестко закреплены на поступательно движущейся платформе 6, несущей изделие 7. Одни концы винтов 2 и 3 связаны с выходными валами шаговых двигателей 8 и 9 посредством соединительных муфт 10, 11. Обмотки шаговых двигателей подключены к одноименным выходам многоканального блока управления 12, снабженного входами В и Н выбора направления движения.
В настоящем предложении рассматривается манипулятор, в котором платформа 6 перемещается в одном направлении (по одной координате X) без направляющих, роль которых выполняют винты 2 и 3. При необходимости создания двухкоординатного манипулятора на подвижную платформу 6 одной координаты (например, координаты X) может быть установлен со смещением на произвольный угол относительно основного (как правило, 90°) дополнительный корпус с винтами, гайками и приводными двигателями, аналогичными основным. В этом случае указанные выше дополнительные элементы будут образовывать вторую координату (например, Y), что позволяет построить двухкоординатный манипулятор. Сборка второй координаты двухкоординатного манипулятора должна осуществляться таким же способом, как и первой.
Предлагаемый способ сборки манипулятора пригоден при использовании любых видов винтовых передач. Но для прецизионных подвижных платформ целесообразно использовать шариковые винтовые передачи, которые обладают высоким КПД и высокой точностью, что позволяет создавать высокоточные и быстродействующие механизмы перемещения изделий, работающие как при атмосферном давлении, так и в вакууме.
Особенности предлагаемого способа сборки манипулятора с шаговыми двигателями обусловлены тем фактором, что при возбуждении обмоток шагового двигателя (даже при отсутствии вращения) на его валу создается так называемый статический момент, который фиксирует его положение.
Возбуждение одноименных обмоток шаговых двигателей 8 и 9, подключенных к выходам общего блока управления 12, обеспечивает синфазное угловое положение обоих винтов 2 и 3. Если при этом (например, вручную) переместить платформу 6 к одному краю корпуса 1 (любому), что обеспечит ее перпендикулярность винтам и одинаковое расположение в корпусе 1, а путем поворота винтов переместить гайки 4, 5 приблизительно в середину платформы, то будет обеспечена синфазность всех подвижных элементов манипулятора. В этом их состоянии (при возбужденных шаговых двигателях) жестко соединяют гайки 4, 5 с платформой 6, а винты 2, 3 с валами шаговых двигателей 8, 9 с помощью муфт 10, 11.
При такой последовательности проведения операций обеспечивается высокая точность сборки манипулятора с шаговыми двигателями и исключаются перекосы в его поступательно движущихся элементах.
Предлагаемый способ сборки может быть использован не только применительно к манипуляторам с двумя шаговыми двигателями, но и для манипуляторов с одним шаговым двигателем.
Способ сборки манипулятора, выполненного в виде корпуса с установленными в нем с возможностью вращения двумя ходовыми винтами, гайки которых связаны с подвижной платформой, предназначенной для размещения изделия и выполненной с возможностью поступательного перемещения по упомянутым винтам, концы которых соединены с валами шаговых двигателей с обмотками, подключенными к выходам многоканального блока управления, характеризующийся тем, что фиксируют упомянутые двигатели относительно корпуса, в корпус устанавливают ходовые винты с расположенными на них гайками, при этом подвижную платформу размещают на ходовых винтах вдоль одного из краев корпуса параллельно ему, а упомянутые гайки располагают напротив центра подвижной платформы без закрепления на ней, в этом положении упомянутых элементов шаговые двигатели подключают к упомянутому блоку управления с возбуждением их одноименных фаз для синфазного углового положения ходовых винтов, при этом жестко скрепляют ходовые винты с валами шаговых двигателей, а упомянутые гайки - с подвижной платформой.
www.findpatent.ru
ЭЛЕКТРОПРИВОД ДЛЯ МАНИПУЛЯТОРА , содержащий двигатель, соединенный с системой управления скоростью, вход которой соединен с выходом первого сумматора, тахогенератор, вал которого сочленен с валом двигателя, датчик тока двигателя, блок отсечки, отличающийся тем, что, с целью повышения быстродействия, в него введены два блока возведения в квадрат, второй сумматор и последовательно соединенные компаратор и релейный элемент, при этом выходы датчика тока и тахогенератора через соответственно первый и второй блоки возведения в квадрат соединены с входами второго сумматора, выход которого через блок отсечки и релейньш элемент соединен с входом первого сумматора,а вход компаратора соединен с тахогенератором. е
СОЮЗ СОВЕТСКИХ
ШИ Л В В
РЕСПУБЛИК
09) 01) цр Н 02 Р 5/06 В 23 0 5/00
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР
AO ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ
ОПИСАНИЕ ИЗОБРЕТЕНИ
Н АВТОУСНОМУ СВИДВТЮЫСТВУ
° с
ВЮ
° (21) 3593203/24-07 (22) 20.05.83 (46) 15.09.84. Бюл.У34 (72) N.È.Ñàôîíoâ и Д.А. Пинский (71) Московский ордена Ленина и ордена Октябрьской Революции энергетический институт (53) 621.3 16.718.5(038.8) (56) 1. Ключев В,И. Терехов В.М.
Электропривод и автоматизация общепромышленных механизмов. М., "Энергия", 1980, с.98.
2. Зимин E.Í. Яковлев В.Н. Автома- тическое управление электроприводами. И., "Высшая школа", 1981,1 с. 218-221 (54) (57) ЭЛЕКТРОПРИВОД ДЛЯ МАНИПУЛЯТОРА, содержащий двигатель, соединенный с системой управления скоро тью, вход которой соединен с выходом первого сумматора, тахогенератор, вал которого сочленен с валом двигателя, датчик тока двигателя, блок отсечки, отличающийся тем, что, с целью повышения быстродействия, в него введены два блока возведения в квадрат, второй сумматор и последовательно соединенные компаратор и релейный элемент, при этом выходы датчика тока и тахогенератора через соответственно первый и второй блоки возведения в квадрат соединены с входами второго сумматора, выход которого через блок отсечки и релейный элемент соединен с входом первого сумматора,а вход компаратора соединенс тахогенератором.
pl где 1 и д — текущее и максимальмакс ное значения частоты, 25 вращения двигателя, — текущее и максимальное. значения момента
M " 1 »мокс двигателя.
Наиболее близким к изобретению
ЗО по технической сущности является электропривод, содержа»ций двигатель, соединенный с системой управле»»ия скоскоростью, вход которой соединен с выходом первого сумматора, тахогенератор, вал которого сочленен с валом двигателя, датч»»Р тока двигателя, блок отсечки (2J, Недостатком известного электропривода является большое расхождение характеристик реального привода и оптимальных эллипсных во RTopoM u четвертом квадрантах, т.е. в тормозных режимах, а, как известно, для позиционных приводов важным является процесс торможения при под- 45 ходе к точке позиционирования. Следовательно, переходные процессы торможения резко отличаются от,оптимальных. Стремление. повысить быстродействия в такой системе с учетом ограничений по скорости и ускорению привода приводят к увеличению колебательности, а для роботов и манипуляторов необходимо иметь апериодические процессы при торможе- 55 нии.
Целью изобретения является повышение быстродействия электропривода.
1 11138
Изобретение относится к электро- . технике, а именно к автоматизированиому электроприводу, и может быть использовано в роботах и манипуляторах. 5
Известен электропривод, содержащий двигатель, соединенный с системой подчиненного регулирования тока и скорости, датчик тока, тахогенератор (1) .
1О
Недостатком электропривода является относительно невысокие точность и быстродействие отработки заданного перемещения, так как механические характеристики электропривода имеют прямоугольную форму, в то время как оптимальной является эллипсоидная форма характеристики,описьЬаемые уравнением
Я. 20 — Ф—
Я
+MQкс +мокс
7.2
Поставленная цель достигается тем, что в электропривод, содержащий двигатель, соединенный с системой управления скоростью, вход которой соединен с выходом первого сумматора, тахогенератор, вал которого сочленен с валом двигателя, датчик тока двигателя, блок отсечки, введены два блока возведения в квадрат, второй сумматор и последовательно соединеннь»е компаратор и релейный элемент, при этом выходы датчика тока и тахогенератора через соответственно первый и второй блоки возведения в квадрат соединены со входами второго сумматора, выход которого через блок отсечки и релейньп» элемент соединен со входом пепвого сумматора, а вход компаратора . соединен с тахогенератором.
На фиг.1 приведена схема электропривода манипулятора, на фиг.2 предельная нагрузочная характеристика электропривода оптимальной эллипсной формы.
Электропривод манипулятора содержит двигатель 1, соединенный с системой управления скоростью 2, вход которой соединен с выходом первого сумматора 3, тахогенератор 4, вал которого сочленен с валом двигателя
1, датчик 5 тока двигателя 1, блок отсечки 6, два блока возведения в квадрат 7 и 8, второй сумматор 9 и последовательно соединенные ком— паратор 10 и релейный элемент 11, при этом выходы датчика тока 5 и тахогенератора 4 через соответственно первый и второй блоки возведения в квадрат 7 и 8 соединены со входами второго сумматора 9, выход, которого через блок отсечки 6 и релейный элемент 11 соединен со входом первого сумматора 3, а вход компаратора 10 соединен с тахогенератором 4.
Второй сумматор 9 имеет входы с регулируемыми весовыми коэффициентами суммирования.
Электропривод работает следующим образом.
Двигатель 1 получает питание от системы управления скоростью 2, которая может быть выполнена различными способами (система с подчиненным регулированием с суммирующим усилителем и т.д., с возможными внутренними обратными связями). С выхода тахогенератора 4 снимается сигнал, про72
)%
2 2
Фиг. 2
Составитель Ю, Воробьев
Редактор С. Тимохина Техред И.Гергель Корректор С.Черни
Заказ 6632/44 Тираж 666
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4
3 11138 порциональный мгновенному значению скорости привода, а с выхода датчика тока (момента) 5 снимается сигнал, пропорциональный моменту двигателя
1. Блоки возведения в квадрат 7 и 8 осуществляют возведение в квадрат сигналов соответственно момента и скорости. Таким образом, на выходе блоков возведения в квадрат 7 и 8 образуются сигналы, пропорциональные 1О
М" H
Выходные сигналы блоков возведения .в квадрат 7 и 8 суммируются с помощью сумматора 9, который имеет раздельно регулируемые весовые коэффициенты по входам. На выходе сумматора 9 получается сигнал
Ы М
t макс макс
20 который подается на блок отсечки 6, Компаратор 10, подключенный своим входом к датчику скорости, имеет выходной сигнал в виде sip И и управ-ляет релейным элементом 11, который подключает выход блока отсечки 6 к сумматору 3 либо с одним, либо с другим знаком, в зависимости от знака скорости ;
В процессе работы привода устройство производит непрерывное вычисление сумы
При нарастании скорости выше значений, предусмотренных предельной нагрузочкой характеристикой привода эллипсной формы (фиг.2) срабатывает блок отсечки 6 и на вход системы управления скорости 2 через релейный элемент 11 подается сигнал на снижение скорости. Привод переходйт на работу на предельную нагрузочную характеристику.
Таким образом, предлагаемый электропривод позволяет увеличить быстродействие в режимах ограничения по скорости и ускорению, так как предельная нагрузочная характеристика отражает предельные возможности привода.



www.findpatent.ru
Попрубуйте сделать правельно регулировку, согласно инструкций
Япошки по характеристикам 340/370 -300/360 серии: 60 литр / мин.при 1700 оборотов, Макс. давление – 20,6 Мпа ( примерно 206 кг/см2)
Я немного перевод добавил к имеющимуся ( извините если, подобрал не так слова):
2.Регулировка ( Adjusting Procedure (2)).
Регулировка осуществляется путем вращения регулировочного винта. Для этого снимите колпачек (CAP), сделайте слабину на зажимной гайки (NUT), и вращая регулировочный винт (SCREW) по часовой стрелке «-» минусовой отверткой что бы увеличить давление или наоборот, против часовой – уменьшить давление в системе.
А) Рисунок снимите крышку и ослабьте гайку.
Б) При расслаблении прижимной гайки, придерживая отверткой регулировочный винт в противном случае регулировочный винт так же будет вращаться и изменит давление настройки..
С) Выдвигая лапы либо телескопы стрелы, либо цилиндр подъема в выдвинутой точке настройте давление:
300 серии: 2500 psi (172 кг/см2)
500 серии: 2850 psi (196 кг/см2)
Двигатель должен работать на оборотах номинальных для насоса, а не холостых или максимальных!
D) Что бы по окончании не сбить настройку, придерживая отверткой регулировочный винт в настроенном положении зажмите гайку.
3. Рисунок подключения манометра (Pressure measuring Gauge Take off port (3))




kmuclub.ru
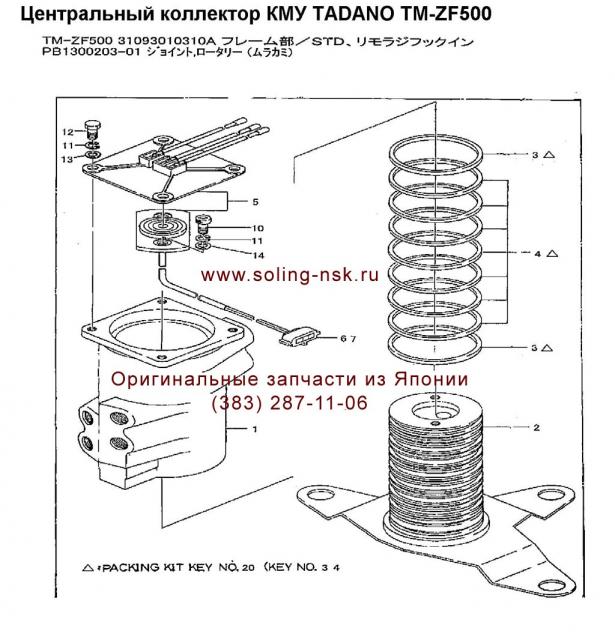
Схема (чертеж) - центрального коллектора крановой установки Tadano TM-ZF500
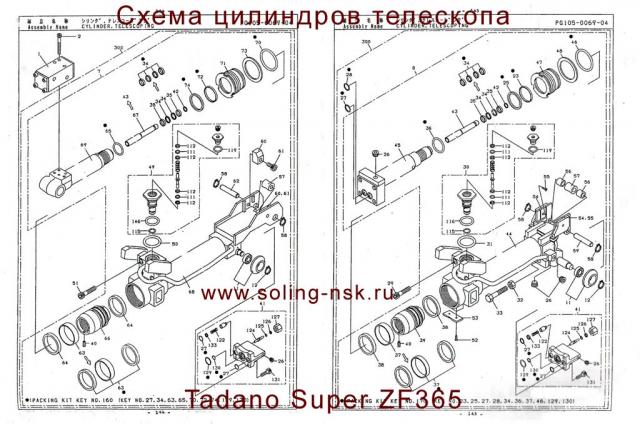
Схема (чертеж) - цилиндров телескопа Tadano Super ZF365
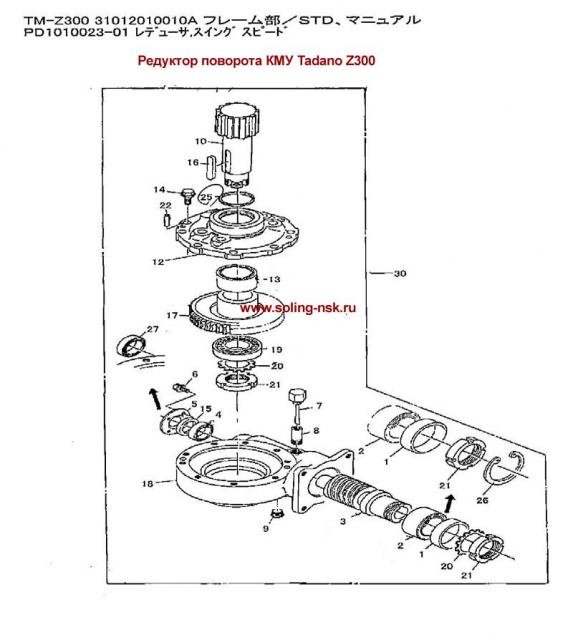
Схема (чертеж) устройства редуктора поворота гидроманипулятора Tadano
 устройства редуктора поворота крана Tadano")
Схема (чертеж) устройства редуктора поворота мобильного крана Tadano TS-75M-1
 устройства редуктора поворота манипулятора Tadano")
Устройство редуктора поворота манипулятора Tadano TM-304
Для заказа необходимой запчасти вы можете сообщить нам номер детали на рисунке и название данной схемы
 устройства цилиндра телескопа стрелы N1 - Tadano")
Устройство цилиндра телескопа стрелы N1 - Tadano ZF504
 устройства цилиндра телескопа стрелы N2 - Tadano")
Устройство цилиндра телескопа стрелы N2 - Tadano ZF504
Для заказа необходимой запчасти вы можете сообщить нам номер детали на рисунке и название данной схемы.

Устройство редуктора поворота крана-манипулятора Tadano.
Подшипник и сальник редуктора.

Схема (устройство) цилиндра № 1 Tadano TM-ZR300

Схема (устройство) цилиндра № 2 Tadano TM-ZR300

Чертеж опорно-поворотного устройства крановой установки Tadano TM-Z304

Шестеренчатые гидронасосы на крановые установки Tadano TM-Z300
kmuclub.ru