





Принцип действия шагового двигателя основан на последовательной подаче напряжения в обмотки статора, в каждый момент времени срабатывающие как магниты и фиксирующие ротор. Разница между токами в обмотках определяет угол поворота ротора. Драйвер ШД – силовое устройство, формирующее токи питания для каждой обмотки.
Одноканальные используются для управления одним ШД. Применяются при построении станков, где используются двигатели типоразмера 86 мм с током управления выше 4А.
Многоканальные представляют собой управляющую плату, на которой размещены одноканальные драйверы в количестве, соответствующем количеству приводов. Используются в станках с ШД типоразмером до 57 мм.
Драйверы не универсальны, под каждую модель ШД выбирается устройство с конкретным набором характеристик.
Базовые критерии выбора:
Контроллеры – платы коммутации, используемые для преобразования управляющих команд, поступающих с ПК, в последовательность импульсов для драйверов. Плата может иметь дополнительный функционал – разъемы для подключения концевых ограничителей, силовые реле, разъемы для управления шпинделем. Подключается к компьютеру через LPT или USB интерфейс.
Многоканальные драйверы ШД –устройство объединяющее в себе драйвера ШД и плату коммутации. Подключаются к ПК непосредственно управляют ШД. Также в состав контроллера входят такие функциональные возможности как таймер СОЖ, конвертор ШИМ для инвертора, силовые реле, разъемы для подключения датчиков ограничения линейных перемещений. Драйвера могут исполняться на различное количество ШД.
cnc-tehnologi.ru
Для того, чтобы подобрать замену вышедшему из строю драйверу шагового двигателя, необходимо учесть несколько параметров:
1. Двигатели бывают с 2-х фазным питанием и 3-х фазным.
У 2-х фазных двигателей обычно 2,4,6 или 8 проводов. Для них соответственно необходимы драйверы с выходом питания на 2 фазы. На драйвере клемма, которая отвечает за питание двигателя, обычно подписана: A+, A-, B+, B-.
 ___________________
___________________
Драйвер Leadshine DM442 для двухфазных двигателей_____________________Двухфазный двигатель Moons 34HD4404-02
У 3-х фазных двигателей обычно 3 или 6 проводов. На драйвере клемма, которая отвечает за питание двигателя, подписана: U, V, W.
 ________________
________________
Драйвер Leadshine 3ND583 для трёхфазных двигателей_________________Трёхфазный двигатель Leadshine 573S-09
2. Драйвера тоже должны получать питание для работы.
Обычно им необходимо питание не “жёстко установленное” (например, 48 вольт), а в диапазоне, например, от 20 до 50 вольт (как на примере выше, драйвер 3ND583). Идеально, если диапазон питания старого драйвера и нового пересекаются. В другом случае, необходимо проверить блоки питания оборудования на предмет того, есть ли у них такие выходы питания, чтобы подходили под диапазон питания драйвера.
Например, в лазерном станке стоит материнская плата Ruida RDLC-320a, которая питается от 24 вольт. Значит где-то в оборудовании размещен блок питания, который раздает питание 24 вольта. Значит драйвер можно так же запитать от блока питания, который даёт питание материнской плате.



Если у вас в станке стоит материнская плата Ruida RDLC-320a, то вы без сомнения сможете запитать драйвер Moons SR4H
3. Каждому двигателю необходима своя сила тока (А – амперы) для нормальной работы.
Если поставить силу тока меньшую необходимой, то двигатель в какие-то моменты вообще не будет крутиться, так как ему передаётся малое “усилие”. Наоборот, если поставить слишком высокую силу тока, то двигатель будет перегреваться и может совсем выйти из строя.
Подобрать необходимую силу тока можно из характеристики двигателя. Либо взять драйвер, который ранее работал в сопряжении с данным двигателем, и посмотреть, на какую силу тока он был настроен (для этого на драйвере есть pin-переключатели и соответствующая таблица).
 __________________
__________________
К двигателю 57HS09 с током фазы 3А подойдёт драйвер Leadshine DM442, у которого можно настроить выдаваемую силу тока от 2,36 до 3,31А
4. Драйвер передает некоторое кол-во импульсов (сигналов) на двигатель для того, чтобы вал двигателя сделал один оборот на 360 градусов. Он может передавать 2 импульса, чтобы двигатель делал один оборот. Или 10 000 импульсов, и двигатель так же будет делать один оборот.
Кол-во импульсов на один оборот так же настраивается на драйвере pin-переключателями соответственно таблице. Необязательно, чтобы данная характеристика сходилась на старом и на новом драйвере. Но желательно, чтобы значение, установленное на старом драйвере, делилось на одно из возможных значений на новом драйвере без остатка. Таким образом будет проще настроить передаточное число.
Например, на старом драйвере было значение 1000. На новом драйвере значение 200. Тогда передаточное число, которое надо будет подстроить в программе, будет больше в 5 раз. Без остатка.
Если же на старом драйвере было значение 1000, а на новом 300, то передаточное число будет в 3,33(3) раза выше. Это не точная цифра, и подстроить верное передаточное число будет сложнее.
Идеальный вариант, когда на новом драйвере есть значение пульсов на 1 оборот такое же, как и установленное значение на старом драйвере.
Краткая инструкция как быстро подобрать драйвер аналогично тому, который недавно вышел из строя
1. Берем наш старый драйвер и смотрим на расположение pin-переключателей:
 _________
_________ 
2. Если сверить расположение наших pin-переключателей с таблицей, то получаем следующий результат: драйвер настроен на выдаваемую силу тока от 2,03А до 2,84А, а установленное количество шагов на 1 оборот - 6 400.
3. Драйвер DM442 двухфазный, о чём говорят обозначения A+, A-, B+, B- на одной из колодок.
4. Необходимое питание для драйвера в диапазоне от 20 до 40 вольт, что говорит надпись в нижнем левом углу.
5. В поисках нужного драйвера я наткнулся на драйвер Moons SR4H, который наиболее вероятно подойдёт под замену вышедшему из строя Leadshine DM442.
 ____________
____________
Pin-переключатели я настроил на 2.5А, количество шагов на оборот - 1/32, что, в соответствии с инструкцией к данному драйверу, означает 6 400 импульсов на 1 оборот двигателя. Необходимое питание для Moons SR4H составляет от 24 до 48 вольт, что как раз вписывается в диапазон питания драйвера Leadshine DM442. Необходимые клеммы, такие как Dir+/Dir- и Step+/Step- (PUL+/PUL-) так же присутствуют на новом драйвере. Этот драйвер точно подойдёт на замену DM442.
iqcnc.ru
31.07.2012
Просмотров: 41 986
Вот довольно таки простой драйвер ШД для самодельного станка с ЧПУ на 3 оси + управление питанием шпинделя. Сам такой собрал, прост в сборке, не требует прошивки. Микросхемы использовал SN74LS75. Стабилизатор 78L05 не использовал, т.к. запитал микросхемы (и сам драйвер) от компьютерного БП (самый оптимальный вариант). При сборке не повторите мою ошибку, под транзисторы обязательно нужна изоляционная тепло-отводная прокладка! А то я замкнул все транзисторы на радиатор и долго не мог понять почему оно не работает… Позже я вовсе убрал радиатор, так как с двигателями типа ПБМГ-200-265 транзисторы не греются совсем.




Разводка печатной платы:

Микросхемы которые можно применить в драйвере:
Datasheet (Даташит) к зарубежным аналогам (SN74ALS75, SN74LS75, SN7475): SN74LS75_datasheet.zip (220кб)
Скачать печатную плату в формате SprintLayout: UR3VCD_V2.0 (34кб)
Позже будет видео, и статья о самом станке.
Добавление: 28.08.2015
Схема контроллера:
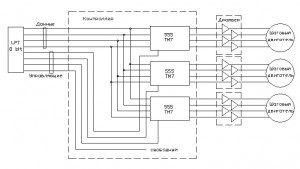
Схема драйвера:
VN:F [1.9.20_1166]
Rating: 9.5/10 (77 votes cast)
Драйвер шагового двигателя для станка с ЧПУ, 9.5 out of 10 based on 77 ratingsПоделиться ссылкой с друзьями:
Updated: 28.08.2015 at 15:24
libixur.ru
| ||||
alex-avr2.livejournal.com
Добавлено в закладки: 1
Цель теста сравнить шумность работы 3D принтера на различных сочетаниях шаговых двигателей и драйверов для них, и определить для себя оптимальный вариант. В этом тесте я попытаюсь развеять или подтвердить некоторые мифы. Ну и основная цель ТриДэшника – просвещение в массы; любое действие должно быть обосновано на основе расчётов и графиков.

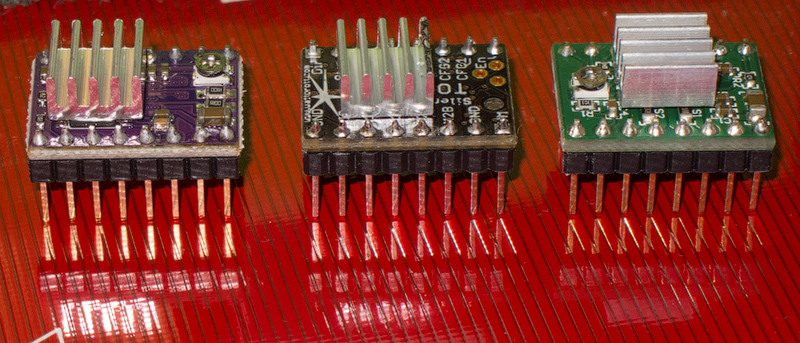
Драйверы шаговых двигателей: DRV8825, TMC2100, A4988
Формулы расчёта Vref
A4988
Vref = Current Limit / 2,5
DRV8825
Vref = Current Limit / 2
TMC2100
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Imax = 1.41 * Irms
G-код для теста
G21G90M107G28 Y0M117 Run Test…G1 F1500 Y190G1 F6000 Y90G1 F3000 Y40G1 F1500 Y10G1 F750 Y3G1 F9000 Y100G1 F6000 Y160G1 F3000 Y200M117 Test Done!G91G28 Y0M84G90
Чтобы получить понятную скорость нужно значение F разделить на 60.
Начинаю тест с этого шагового двигателя потому, что он стандартной мощности и уже стоит на 3D принтере Mendel90. На 3D принтере в прошивке Marlin стоят ускорения 1500 – это стандартные ускорения для подобных 3D принтеров. У этого двигателя есть ещё одно отличие – он работает на принтере с весны 2014 года (сейчас январь 2016 года), а все остальные новые (лежали и не использовались до этого момента).
A4988
Vref = 1,7 / 2,5 = 0,68В
DRV8825
Тестирую только на этом ШД для относительного сравнения графиков уровней громкости на различных скоростях. И самое интересное – сравнение на двух микрошаговых установках 1/16 и 1/32.
Vref = 1,7 / 2 = 0.85В
TMC2100
Vref = (Current Limit * 0,709 * 2,5В) / 1,77А = (1,7 * 0,709 * 2,5) / 1,77 = 1,7В
Vref 1,7В после часа печати температура шагового двигателя 54 градуса. Замерял термометром с термопарой TM-902C
54 градуса говорят о том, что на двигатель подаётся ток выше нормы и нужно его снижать.
Vref 1,5В после часа печати температура шагового двигателя 50,3 градуса
Vref 1,2В после часа печати температура шагового двигателя 44 градуса. Меня это пока устроило; получился коэффициент 1,2 / 1,7 = 0,706 от расчётного Vref, его и буду использовать в дальнейшем

Нестандартный шаговый двигатель – обычная мощность и необычный ток. По легенде он менее шумный. Проверим это!
A4988
Vref = 1,3 / 2,5 = 0,52В
TMC2100
Vref = (Current Limit * 0,709 * 2,5В) / 1,77А = (1,3 * 0,709 * 2,5) / 1,77 = 1,3В
Теперь для меньшего нагрева шагового двигателя Vref умножим на выведенный коэффициент 1,3 * 0,706 = 0,92В
На TMC2100 этот двигатель свистит!

Мощнее чем W609 в 1,2 раза, поэтому я подкорректирую Vref под нашу нагрузку. Возможно он будет меньше шуметь, так как будет работать на меньшем токе.
A4988
Vref = 2,5 / 2,5 = 1 / 1,2 = 0,83В
TMC2100
Vref = (2,5А * 0,709 * 2,5В) / 1,77А = 2,5 / 1,2 = 2,08В
умножим на коэффициент 0,706 = 1,47В

Сейчас это самый стандартный ШД. Vref как у Wantai 42BYGHW609 1,7А
Издаёт свист на TMC2100 во время работы!

Такой двигатель тоже часто устанавливают на 3D принтеры. Vref как у Wantai 42BYGHW609 1,7А

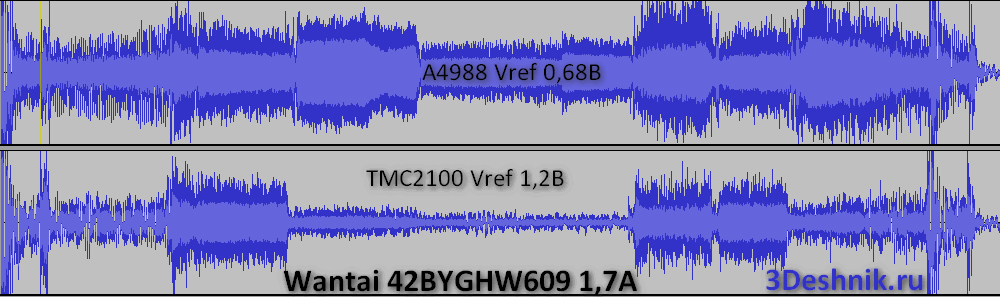
Wantai 42BYGHW609 1,7А на A4988 Vref 0,68В


Тест проведён на средних скоростях печати для большинства принтеров. С повышением скорости шум возрастает. Анализируйте G-код и выбирайте интересующие вас скорости.
Драйверы DRV8825 очень неоднозначные. Выводы по ним сложно сделать. Первый раз сравнив записи я решил, что ошибся и повторил тест с ними. Снижение напряжения Vref повышает шумность работы драйверов. Микрошаг 1/32 не даёт видимого преимущества перед микрошагом 1/16. На низких скоростях DRV8825 1/32 менее шумный, чем A4988.
Драйвер A4988 в среднем аутсайдер, но не так уж и плох для своей цены. Звук работы на нём приятнее, чем на DRV8825 1/32.
TMC2100 (куплен в США) явный лидер теста. Очень большая непонятность в формуле расчёта Vref, правды я так и не нашёл, поэтому уменьшал Vref по итогам нагрева двигателя во время полуторачасовой печати. Себе пока поставил Vref 1,1В. Ещё одна странность – некоторые двигатели на нём свистят. Раньше я такое встречал на DRV8825. Не знаю от чего это зависит, от драйвера или от двигателя.
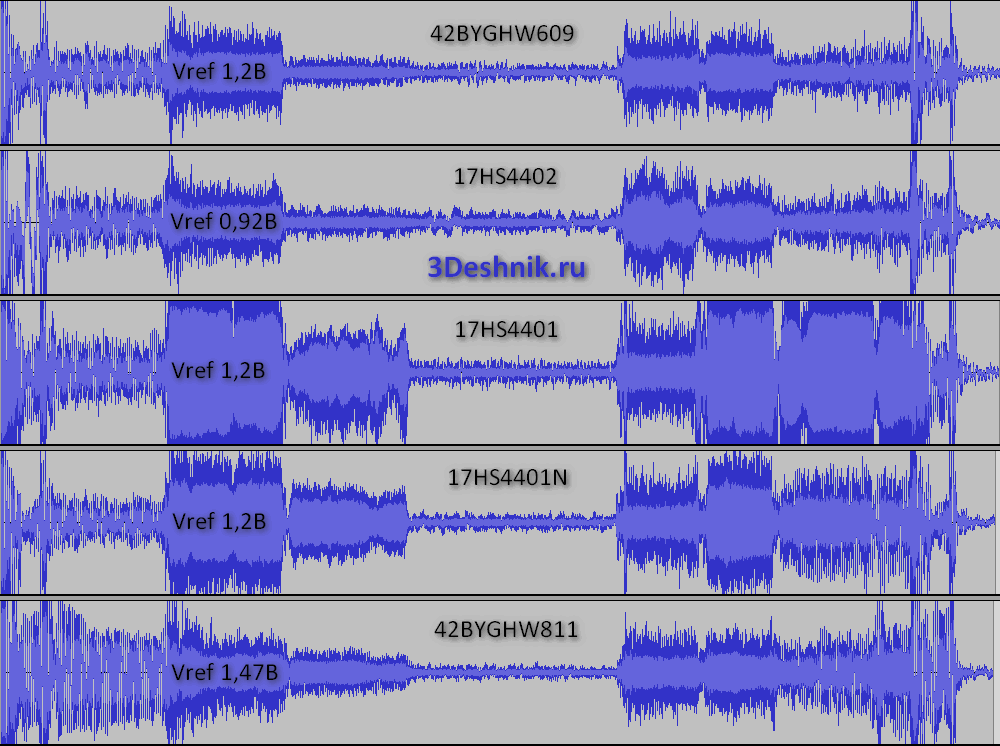
Шаговые двигатели 17HS4401 и 17HS4401N оказались аутсайдерами теста, но цена и доступность им всё прощает.
17HS4402 мог быть лидером, если бы не свистел в связке с драйвером TMC2100. Возможно даже свист немного портит график.
Wantai 42BYGHW609 просто хороший двигатель.
Мощные двигатели типа Wantai 42BYGHW811 тоже можно использовать, если подобрать Vref для малошумной работы.
Для более глубокого понимания формул смотрите отдельную тему на форуме по этому вопросу.
Архив с записями. Анализируйте и делайте свои выводы!
Варианты борьбы с шумом 3D принтера обсуждаем на форуме. Ссылка на обсуждение.
Свои выводы и замечания оставляйте в комментариях.
Метки: 17HS4401, 17HS4401N, 17HS4402, 42BYGHW609, 42BYGHW811, A4988, DRV8825, TMC2100, Vref, шум   2016-01-17      Раздел: Настройка, Электроника    Автор: AKDZG Просмотров: 15 052   19 комментариев
Автор: AKDZG Просмотров: 15 052   19 комментариев
3deshnik.ru
Читать все новости ➔
В статье представлены схема и конструкция, описан принцип действия драйвера биполярного шагового двигателя на базе микроконтроллера ATmega48. Он способен работать со многими двигателями, не содержит специализированных микросхем для управления шаговыми двигателями. Универсальность обеспечена оригинальным методом поддержания заданного тока в обмотках двигателя. Эта конструкция может послужить основой для создания аналогичных устройств, содержащих дополнительные элементы безопасности - опторазвязку входных цепей, защиту от замыкания нагрузки и пр. В описываемом устройстве в связи с предполагаемыми "умеренными"условиями его эксплуатации и для ограничения стоимости такие узлы не предусмотрены.
Целью разработки было создание простого и недорогого драйвера биполярного шагового двигателя универсального применения. Всё программное обеспечение написано на языке ассемблера AVRASM и оптимизировано по времени выполнения, что позволило решить задачу на имеющейся на момент разработки элементной базе.
Основные технические характеристики
Принципиальная схема драйвера приведена на рис. 1 . В его основу положены мостовые формирователи тока фаз А и В на полевых транзисторах VT1-VT4, VT5-VT8 соответственно, управляемые специализированными микросхемами-драйверами верхних и нижних ключей полумоста DA5-DA8 IR2104S. Для повышения помехоустойчивости применено раздельное питание силовой части (27 В) и логической части с драйверами силовых ключей (12 В).
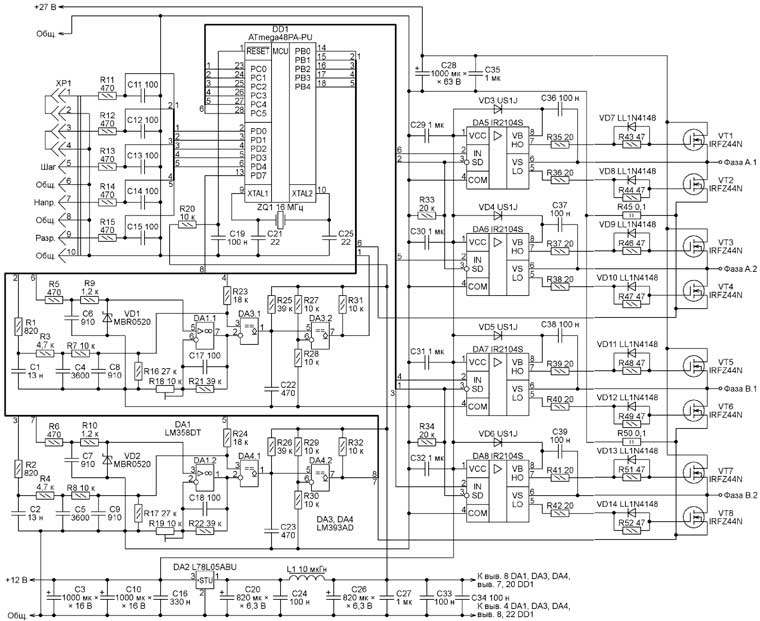
Рис. 1
Далее рассмотрим часть схемы, относящуюся к одной из фаз (фазе А), поскольку часть, относящаяся к фазе В, действует аналогично.
Мгновенное значение тока фазы устройство определяет по падению напряжения на резисторе R45, которое через интегрирующую цепь R5C6 поступает на неинвертирующий вход усилителя DA1.1 с регулируемым коэффициентом усиления, выполняющего также функцию ФНЧ первого порядка. С выхода усилителя сигнал приходит на инвертирующий вход компаратора DA3.1. Компаратор сравнивает сигнал, пропорциональный текущему через фазу двигателя току, с образцовым напряжением. Его формирует в виде ступенчатой синусоиды (для микрошагового режима работы) Таймер 1 микроконтроллера, работающий в режиме "Быстрая ШИМ" без предварительного деления. Сигнал с выхода таймера пропущен через многозвенный фильтр R1C1R3C4R7C8. Период следования широтно-модулированных импульсов - 12,7 мкс, что соответствует частоте 78,4 кГц. Резистор R23 в рабочем режиме в формировании образцового напряжения не участвует, так как выход PB3 микроконтроллера, к которому он подключён, находится в высокоимпедансном состоянии.
В режиме удержания (после отсутствия импульсов на входе "Шаг" в течение последних 3,4 с) программа устанавливает на выходе PB3 микроконтроллера низкий логический уровень, и амплитуда образцового сигнала понижается. С выхода компаратора DA3.1 с открытым коллектором, нагруженного резистором R25, результат сравнения поступает на вход компаратора DA3.2. Выход компаратора DA3.1 связан также с общим проводом через конденсатор C22. Совместно R25 и C22 - времязадающая цепь узла стабилизации тока. При его падении ниже некоторого образцового уровня происходит зарядка конденсатора C22 через резистор R25. В интервале времени от начала зарядки до достижения напряжением на конденсаторе значения, заданного делителем напряжения R27R28, питание обмотки двигателя отключено, что препятствует быстрым флюктуациям тока около образцового значения.
Этот алгоритм в классическом смысле не относится к алгоритмам стабилизации тока “Fixed-Frequency PWM” или “Fixed-Off-Time PWM”, однако на практике он показал хорошую работоспособность. При превышении током образцового значения на выходе компаратора DA3.2 установлен низкий логический уровень. Микроконтроллер реагирует на это отключением обмотки одновременным закрыванием транзисторов VT1-VT4 с помощью сигнала SD, подаваемого на драйверы DA5 и DA6. Этим достигается быстрый спад тока в обмотках двигателя. В случае спада тока ниже образцового происходит обратное, на драйверы DA5 и DA6 поступает сигнал SD высокого уровня, открывающий упомянутые транзисторы, что не препятствует нарастанию тока в обмотке.
Смена ступеней образцового напряжения, а также смена комбинаций открытых и закрытых транзисторов моста происходит с приходом очередного импульса на вход "Шаг" по алгоритмам, зависящим от предустановленного коэффициента деления шага (наличия перемычек между контактами 1-2 и 3-4 разъёма XP1) и текущего направления вращения (логического уровня сигнала на входе "Напр."). Вход "Разр." был задуман для разрешения и запрета работы двигателя, но в прилагаемой к статье версии программы он не действует.
Драйвер выполнен на двухсторонней печатной плате, чертёж печатных проводников которой изображён на рис. 2, а расположение элементов - на рис. 3. Транзисторы VT1-VT8 расположены с одной стороны платы теплоотводящими поверхностями от неё. К этим поверхностям прижат через изоляционные прокладки теплоотвод - в простейшем случае алюминиевая пластина размерами 60х60 мм. Следует заметить, что при токе фаз более 4...5 А и длительном режиме работы теплоотвода в виде пластины может оказаться недостаточно и его поверхность следует увеличить, сделав теплоотвод ребристым или игольчатым.
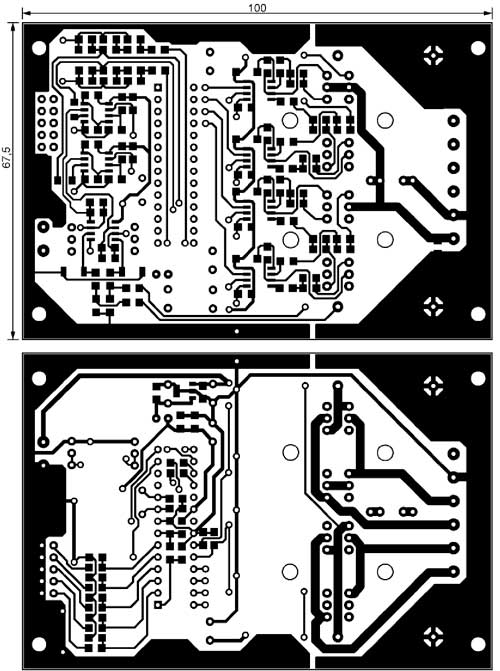
Рис. 2
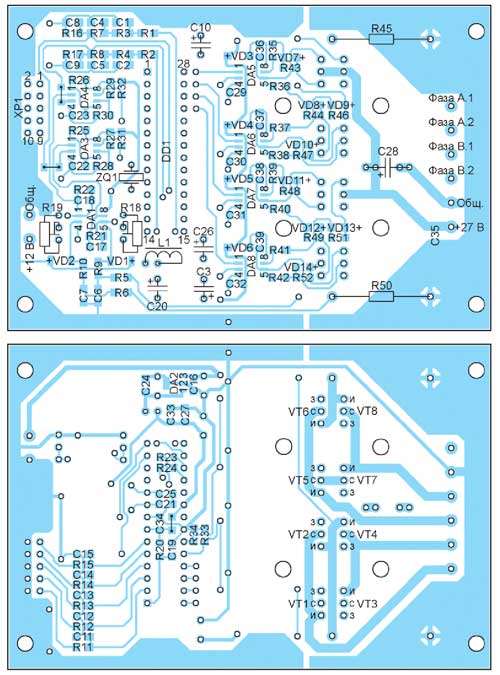
Рис. 3
Материал платы следует выбрать толщиной не менее 1 ...1,5 мм, толщина фольги - не менее 35 мкм. Печатные проводники, по которым течёт большой ток, следует обильно залудить или бандажировать медной проволокой, припаяв её по всей длине проводника.
Большая часть компонентов конструкции применена в оформлении для поверхностного монтажа. Резисторы и конденсаторы - типоразмера 1206. Резисторы R45, R50 имеют проволочные выводы и мощность - не менее 2 Вт. оксидные конденсаторы в цепях питания - с малым ESR. Подстроечные резисторы R18 и R19 - многооборотные 3296W.
Амплитудные значения тока фаз двигателя регулируют подстроечными резисторами R18, R19. Проще всего это делать, переведя драйвер в режим микрошага 1/8 и контролируя цифровым вольтметром падение напряжения на резисторах-датчикахтока R45 и R50. Подавая на вход "Шаг" одиночные импульсы, добиваются максимальных значений тока поочерёдно в фазах А и В. Подстроечными резисторами устанавливают эти значения одинаковыми и соответствующими требуемой амплитуде тока. Уменьшение сопротивления под-строечных резисторов приводит к снижению тока, и наоборот. Для ориентировки можно воспользоваться табл. 1, в которой приведена зависимость амплитуды тока фазы Imф от введённого сопротивления подстроечного резистора.
Таблица 1
| Imф, A | 0,25 | 0,5 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 6.5 |
| R18, R19, кОм | 0,31 | 0,62 | 1,27 | 2,62 | 4,07 | 5,62 | 7,29 | 9,09 | 10,04 |
Перед включением драйвера следует установить перемычки между контактами 1-2 и контактами 3-4 разъёма XP1, обеспечивающие нужный коэффициент деления шага двигателя в соответствии с табл. 2. Программа анализирует состояние перемычек однократно в начале своей работы, дальнейшее изменение их состояния никакого влияния на работу драйвера не оказывает. Переключение коэффициента деления "на ходу" в предлагаемой версии программы не предусмотрено.
Таблица 2
| Перемычки на ХР1 | Коэффициент деления шага | |
| 1-2 | 3-4 | |
| Есть | Есть | 1/1 |
| Нет | Есть | 1/2 |
| Есть | Нет | 1/4 |
| Нет | Нет | 1/8 |
Скачать программу микроконтроллера Atmega48 и файл печатной платы в формате Sprint Layout 6.0.
Автор: М. Резников, г. Волчанск, УкраинаИсточник: Радио №9, 2016
meandr.org










