





Микросхема L293D используется для управления коллекторными двигателями. Обеспечивает реверс и торможение. Имеет два канала управления и по тому можно использовать одну микросхему для двух двигателей.
На принципиальной схеме L293 видно, что каждый канал управления состоит из пары транзисторов. Для защиты от индукционных токов есть диодная защита, но только на микросхемах с индексом "D".

Для управления током на двигателе допускается подавать на микросхему ШИМ сигнал. Это позволяет делать плавный старт или регулировать скорость вращения двигателя.

Каждый из четырех транзисторов способен управлять отдельным двигателем, но увы без реверса и торможения. Схема подключения:
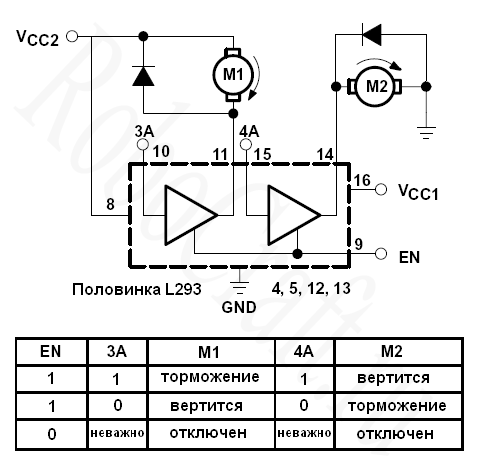
Если на оба транзистора (два управляющих входа для каждого канала) подать логическую единицу, то выходы канала будут коротко замкнуты между собой. ЭДС, что вырабатывается двигателем во время вращения, будет тормозить двигатель. Инерционное вращение будет минимальным, что обеспечивает мгновенное торможение.Подобный принцип можно наблюдать в шуруповертах. Если резко отпустить курок - вал мгновенно прекратит вращение.
Если на вращающем двигателе к управляющим входам подать логический ноль, то мотор будет останавливаться как обычно при отключении питания - уменьшая вращение до полного останова.
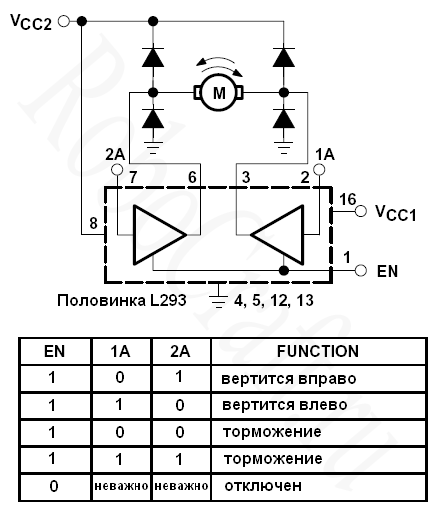
На один из транзисторов канала подаем логическую единицу, а на другой ноль - вращение в одну сторону. Инвертируем аналогично и получаем реверс.
У микросхемы L293D есть один существенный недостаток. В ней используются биполярные транзисторы, которые в отличии от полевых имеют значительное сопротивление в открытом состоянии, что вызывает нагрев и потерю напряжения на выходе. Если использовать мощный электромотор, то микросхема будет интенсивно греться и ей потребуется теплоотвод.Если вы управляете одним мощным двигателем, то имеет смысл подключить оба канала параллельно и тогда микросхема сможет выдавать ток в два раза больше, чем один канал.
Пример подключения коллекторного двигателя к arduino:

diytimes.ru
VNh3SP30 это мостовой (H-bridge) драйвер для мощных коллекторных двигателей.
Модуль собран на микросхеме-драйвере VNh3SP30 от STMicroelectronics, в драйвере использованы современные MOSFET транзисторы с сопротивлением перехода 19 MΩ, драйвер имеет защиту по температуре, перенапряжению и короткому замыканию.

 Обозначение на обратной стороне платы,
Обозначение на обратной стороне платы,
Модуль можно подключать на любые свободные выходы arduino, кроме ноги PWM, для него выход должен уметь генерировать ШИМ, такие выходы обозначены ~ (тильдой).
потом
тут. или тут.
arduinolab.pw
Модуль собран на двух микросхемах HG7881 или аналоге L9110S, к модулю можно подключить два маломощных коллекторных или один шаговый двигатель.
Максимальный ток: 800mA, на каждый канал.
Управление логическим уровнем.
Встроенные защитные диоды.
Рабочая температура: 0℃ … 80℃.
Модуль собран на двух полумостовых драйверах (H-bridge) HG7881, к сожалению подробного даташита на микросхему нет. Хотя и пишут что он предназначен для управления моторами, это не совсем так, у драйвера отсутствует возможность изменять скорость вращения мотора, драйвер способен изменять только направление вращения. По этой причине, данный модуль больше подходит для управления небольшими шаговыми двигателями, нежели коллекторными.
 На схеме из даташита видно, что в наличии только входы для управления полумостами и питание.
На схеме из даташита видно, что в наличии только входы для управления полумостами и питание.


Модуль подключается на два свободных выхода arduino, питание для моторов, если они маломощные и работают от напряжение 5 вольт, можно взять от arduino. Чтобы заставить мотор крутится, нужно на один выход подать логическую единицу и на второй логический ноль. Для изменения направления вращения, нужно инвертировать состояние обеих выходов arduino. подробнее в видео ниже.
код из видео
#define A1_A 8 // выходы на драйвер #define A1_B 9 void setup(){ pinMode (A1_A, OUTPUT); pinMode (A1_B, OUTPUT); } void loop(){ // включаем мотор на 1 секунды вперед digitalWrite (A1_A, HIGH); digitalWrite (A1_B, LOW); delay(1000); // выключаем мотор digitalWrite (A1_A, LOW); digitalWrite (A1_B, LOW); delay(1000); // включаем мотор на 1 секунды назад digitalWrite (A1_A, LOW); digitalWrite (A1_B, HIGH); delay(1000); // выключаем мотор digitalWrite (A1_A, LOW); digitalWrite (A1_B, LOW); delay(1000); // плавно увеличиваем скорость digitalWrite (A1_A, LOW); for (int i = 0; i < 255; i++){ analogWrite (A1_B, i); delay(25); } delay(2000); // плавно уменьшаем скорость digitalWrite (A1_A, LOW); for (int i = 255; i > 0; i--){ analogWrite (A1_B, i); delay(25); } delay(1000); } Подключаем обмотки за место коллекторных двигателей. Для работы можно использовать встроенную в среду библиотеку Stepper.h.
Подключаем обмотки за место коллекторных двигателей. Для работы можно использовать встроенную в среду библиотеку Stepper.h.
arduinolab.pw
Драйверы коллекторных двигателей постоянного тока (щеточные электродвигатели) - предназначены для управления скоростью и направлением вращения коллекторных ДПТ в станках ЧПУ и системах автоматизации (коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями). Обычно управление осуществляется при помощи ШИМ. Наша организация обеспечивает техническую поддержку, гарантийный и послегарантийный ремонт приобретенного электронного оборудования. Мы всегда готовы ответить на любые Ваши вопросы по нашей продукции.

Драйвер PLDC2080, код p0000016605
PLDС2080 – драйвер коллекторного двигателя 18-80В DC или 12-55В AC, ток до 20А. Предназначен для управления коллекторными шпинделями постоянного тока и другими коллекторными электродвигателями. Обороты двигателя регулируются ШИМ-сигналом (например от MACh4), встроенным или внешним потенциометром. Управление сигналами Enable и DIR. Защита от превышения тока, от эффекта обратной ЭДС от двигателя и дампер. Все управляющие входы драйвера оптоизолированы и совместимы с логическими уровнями 3.3В и 5В.

Драйвер PWM6010-1, код p0000010879
Драйвер коллекторного двигателя 10-60В DC, ток до 10А. Предназначен для управления коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями. Обороты электродвигателя регулируются потенциометром.

Драйвер PWM6020-1, код p0000010907
Драйвер коллекторного двигателя 10-60В DC, ток до 20А. Предназначен для управления коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями. Обороты электродвигателя регулируются потенциометром.

Драйвер коллекторного двигателя DCTS-600, код p0000006908
Драйвер коллекторного двигателя 15-160В DC или 12-110В AC, ток до 10А. Предназначен для управления коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями. Обороты шпинделя регулируются ШИМ-сигналом (например от MACh4) или встроенным потенциометром.

Драйвер коллекторного двигателя ZLTSQ-300X, код p0000007805
Драйвер коллекторного двигателя 9-48В DC, ток до 15А. Предназначен для управления коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями. Обороты шпинделя регулируются ШИМ-сигналом (например от MACh4) или напряжением (внешним потенциометром).

Драйвер коллекторного двигателя LD-S-600, код p0000007806
Драйвер с источником питания для коллекторного двигателя 5-110В, ток до 10А, 600Вт. Напряжение питания ~220В от сети переменного тока. Предназначен для управления коллекторными шпинделями постоянного тока или другими коллекторными электродвигателями. Обороты шпинделя регулируются ШИМ-сигналом (например от MACh4) или напряжение (внешним потенциометром).
С этим товаром покупают:
belpl.by
Один из самых простых и распространённых вариантов роботов – это колёсные платформы. Но коллекторный мотор просто так напрямую к контроллеру не подключить – нужен управляющий драйвер. В радиотоварах сейчас можно найти готовые микросхемы контроллеров двигателей, это L293 с током до 1А на канал и L298N с током до 2-х ампер. Но что делать, если нужно использовать двигатель с большим рабочим током? Для этой цели было решено изготовить свой драйвер двигателя. Но не сразу городить драйвер для мощных моторов, а для начала поэкспериментировать на малом.
Драйвер коллекторного двигателя
Так появился 4-х амперный драйвер коллекторного двигателя.
Технические характеристики
| Напряжение питания | 5-15, 20, 25, 25В |
| Максимальный ток | 1, 1.5, 2, 4А |
| Напряжение управляющего сигнала | 3-12В |
| Частота управляющего сигнала ШИМ | 80-200Гц |
| Габариты | 35х26 мм |
Технические характеристики приведены для ключей IRF7507, IRF7105, IRF7309, IRF7389 соответственно. Рекомендуемая рабочая частота ~100Гц.
Схема
Драйвер построен на H-мосте из 4-х n и p канальных полевых транзисторов. Обладает защитой управляющей схемы, в виде шотки диодов, которые защитят источник управляющего сигнала от наводок и скачков мотора. Управление:
| X1 | X2 | Мотор |
| 0 | 0 | выкл |
| 0 | 1 | прямо |
| 1 | 0 | обратно |
| 1 | 1 | Режим неопределённостиилипредыдущий режим работы |
Контроллер двигателя оснащён защитой, если на него поступят обе единицы – драйвер продолжит вращение в ранее установленном направление.
Во время эксплуатации не допустима резкая смена направления вращения двигателя, а требуется программный контроль остановки мотора и только затем начало вращения двигателя в противоположную сторону. Т.к. при резкой смене направления вращения останавливающейся мотор, двигающийся по инерции, переходит в режим генератора и на него в это же время подаётся питание обратной полярности, что приводит к большому скачку тока на ключах, что в случае превышения максимально допустимого тока ключей может привести к выходу последних из строя. Самый простой вариант такого контроля – это внесение задержек, которые будут давать мотору время на остановку. При использование редукторов резкий стар тоже являться не желательным, т.к. потребляемый мотором ток может выйти за максимальный коммутируемый ключами ток, что может вывести их из строя. Для любых используемых двигателей рекомендуется плавный старт.
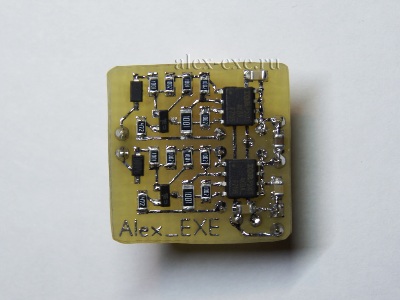
Печатка
Основную часть платы составляют H-мост из 4-х полевых n и p канальных ключей VT3, VT2 и VT6, VT5. В данном исполнение схемы ключи могут быть одного из следующих видов – два сдвоенных n и p канальные mosfet’ы в корпусе SO8: IRF7507 1А 15В, IRF7105 1.5А 20В, IRF7309 2А 25В, или IRF7389 4А 25В. VT1 и VT4 BC847 транзисторы в корпусе SOT-23 открывающие полевые ключи. Для защиты управляющей схемы от возможных скачков и наводок применены два диода шотки VD1 и VD2 MBR0420 SOD-123. Диоды VD3-VD6 гасят выбросы двигателя (на фотографиях их нет), MBRS540 или SK56C в корпусе SMC. Резисторы R9 и R10 по 1кОм 1206, все остальные резисторы типоразмера 0805: R3, R6, R8, R14 – 1кОм, R4 и R7 – 4,7кОм, R1, R2, R5, R11-R13 – 10кОм. Конденсаторы C1, C3, C4 – 0,1 мкФ, C5 – 1мкФ, все типоразмера 0805 и напряжением 50В. Конденсатор С2 от 470мкФ до 1000мкФ напряжением от 35В. Разъемы PLS2 и PLS3 без среднего пина. Размеры платы 23х23мм. Мотор любой коллекторный, но что бы напряжение питания и ток не превышали максимальных характеристик деталей.

Плата драйвера со стороны выводов
Скачать печатку

alex-exe.ru
Всем, кто хоть немного занимался робототехникой и строил простых колёсных роботов, известны такие микросхемы, как L293, L298 , которые являются драйверами коллекторных моторов током до 300мА и 2А на канал. Микросхемы хорошие и распространённые, только им уже много лет, проще говоря – они уже устарели, вот только замену найти не так то и просто.

Драйвер коллекторного двигателя drv8833
В статье пойдёт речь о миниатюрной микросхеме 2-х канального драйвера двигателей, с максимальным током 1500 мА на канал, которая будет хорошей и достойной заменой L293 и L298.
Если обратить внимание на готовые модули драйверов двигателей, продающиеся в Интернет магазинах – то можно найти много интересных микросхем, только, к сожалению, частенько трудно найти подобные микросхемы на наших Российских радиоэлектронных торговых площадках, т.к. много вкусных электронных решений к нам не привозят. Но если Вам открыты не только наши рынки, то ситуация полегче. Так же на известных площадках Интернет магазинов, таких, как ebay, то же не всё можно найти. К чему такое лирическое отступление – к тому, что не все легко достать, в том числе данную микросхему, и немного накипело, т.к. такое большое количество новинок и хороших компонентов не так легко достать простому обывателю. Но вернёмся к драйверу.

Испытание драйвера drv8833
Характеристики:
| Количество каналов | 2 |
| Возможность объединения каналов | да |
| Напряжение драйвера | 2,7-10,8В |
| Управляющее напряжение | 3-6В |
| Частота ШИМ | 50кГц |
| Максимальный ток на канал | 1,5А (заявлено, на самом деле поменьше) |
| Пиковый ток на канал | 2А |
| Максимальный ток объединённых каналов | 3А (пик 4А) |
| Встроенное ограничение тока | есть, резистором |
| Защита от перегрева и перегрузки | есть |
Сам драйвер представляет из себя два H-моста, способные управлять 2-мя (или одним, при объединении) коллекторными моторами или одним шаговым двигателем. Драйвер имеет не очень большое рабочее напряжение до 10,8В. Максимальный рабочий ток одного канала может варьироваться около 1А, всё зависит от разводки, а точнее от теплоотвода от микросхемы, т.к. при недостаточном теплоотводе у драйвера на 1А (на испытании данной разводки) спустя пару минут работы может сработать защита по перегреву (примерно 90 градусов) и отключить драйвер. Тем не менее, такого рабочего напряжения и тока достаточно для работы с маломощными моторами, которые применяться в любительской робототехники.
Схема
Печатка
Плата драйвера получилась компактной 22х26мм. Для работы драйвера требуется небольшая обвязка. Основа микросхема самого драйвера drv8833pwp в HTSSOP-16 корпусе (0.35мм площадка вывода, 0.64 зазор, длина 5мм), есть и другие варианты корпусов. В обвязке микросхемы два конденсатора типоразмера 1206 2,2мкФ и 0,01мкФ. По питанию 0805 0,1мкФ и чип тантал типоразмера A 10мкФ 16В. Так же добавил два конденсатора параллельно моторам по 0,1мкФ 0805. Для ограничения тока служат 2 резистора 0.25Вт в корпусе 1206, сопротивление см. ниже. Разъёмы: PLS-8 и два винтовых клеммника 350-021-12 на моторы. Для возможности установки небольшого радиатора предусмотрено два крепежных отверстия М2 или М2.5 (что просверлите).
Вид платы модуля драйвера drv8833
Выводы:
| VM, VCP, Vint, GND | Питание |
| AIN1, AIN2 | Вход управления 1 двигателем. |
| BIN1, BIN2 | Вход управления 2 двигателем. |
| AOUT1, AOUT2 | Выводы полумоста, выход на 1 двигатель |
| BOUT1, BOUT2 | Выводы полумоста, выход на 2 двигатель |
| AISEN, BISEN | Задание токоограничения на 1 и 2 мотор. Если посадить на землю – выключено. |
| /nSleep | Спящий режим, задаётся низкий уровнем сигнала |
| /nFault | Выход аварийного сигнала. Низкий уровень в случае перегрузки по току, перегреву, низкому напряжению; в рабочем режиме плавающий сигнал. |
Токоограничитель рассчитывается последующей формуле:
Если посадить на землю (или установить перемычки 0 Ом) – то токоограничитель будет выключен.
Логика работы
| xIN1 | xIN2 | xOUT1 | xOUT2 | описание |
| 0 | 0 | Z | Z | Выкл, свободное вращение |
| 0 | 1 | L | H | Назад |
| 1 | 0 | H | L | Вперед |
| 1 | 1 | L | L | Торможение, стопор |
Так же отмечу, то в серии drv88xx есть и другие разнообразные драйверы для различных вариантов использования.
Скачать печатку
Благодарность за предоставленный образец микросхемы драйвера местному хакспейсу – MaketItLab
alex-exe.ru

Схема 1 - Драйвер электродвигателей
Этот драйвер представляет собой набор полумостов с усилителями напряжения и обратными диодами. Через такой драйвер можно управлять двумя маломощными коллекторными электродвигателями постоянного тока, одним подходящим маломощным асинхронными электродвигателем или одним подходящим четырёхвыводным маломощными шаговым электродвигателем а также этому драйверу можно найти много других применений (например для передачи напряжений на динамик, для преобразования напряжений и т.д. для чего применяются мосты). В общем полезная вещь для использования совместно с микроконтроллером. Рассмотрим пример подключения к этому драйверу маломощных коллекторных электродвигателей постоянного тока:
Схема 2 - Пример подключения коллекторных двигателей
Можно подключать так но в принципе не обязательно, можно и по другому. Пример подключения драйвера к микроконтроллеру ATtiny2313:
Рисунок 3 - Подключение драйвера к микроконтроллеру
Для изготовления платы драйвера можно использовать двусторонний фольгированный стеклотекстолит и надфиль (надфиль используется как инструмент для вырезания дорожек на фольгированном стеклотекстолите). Для силовых транзисторов сверлятся отверстия:
Для силовых транзисторов сверлятся отверстия:  Широкие медные площадки способствует отводу тепла. Термопасту использовать не надо т.к. нужен ещё и хороший электрический контакт между корпусом силового транзистора (который соединён с коллектором) и площадкой. На обратной стороне площадка разделяется вдоль (одна-земля (GND), другая"+" питания):
Широкие медные площадки способствует отводу тепла. Термопасту использовать не надо т.к. нужен ещё и хороший электрический контакт между корпусом силового транзистора (который соединён с коллектором) и площадкой. На обратной стороне площадка разделяется вдоль (одна-земля (GND), другая"+" питания):  Металлические части корпуса транзисторов немного очищаются для лучшего электрического и теплового контактов и прикручиваются к плате (КТ817 на площадку с "+"ом, КТ816 на площадку с землёй (GND)):
Металлические части корпуса транзисторов немного очищаются для лучшего электрического и теплового контактов и прикручиваются к плате (КТ817 на площадку с "+"ом, КТ816 на площадку с землёй (GND)):  Далее к плате припаиваются остальные детали:
Далее к плате припаиваются остальные детали: 
 Можно испытать драйвер с микроконтроллером с прошивкой из предыдущей статьи, как это будет работать можно посмотреть на видео: КАРТА БЛОГА (содержание)
Можно испытать драйвер с микроконтроллером с прошивкой из предыдущей статьи, как это будет работать можно посмотреть на видео: КАРТА БЛОГА (содержание) electe.blogspot.com







