Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями. При тех же габаритах биполярный шаговый двигатель обеспечивает больший момент по сравнению с униполярным.
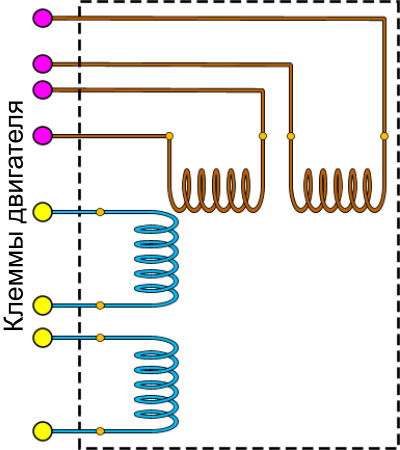
Каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной системе управления и как при этом изменяются электрические характеристики двигателя?
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов - униполярное либо биполярное подключение обмоток двигателя.
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать центральный отвод.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения - биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов - униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения - использовать лишь две из четырех обмоток.
Электрические характеристики двигателя - ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. - в этом случае равны данным, приведенным в каталоге.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток - 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток - 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R - именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении - Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр.. = 4 * Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
| Ток/ фаза, А | 2 | 2.8 | 1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |

www.npoatom.ru

Шаговый двигатель
Шаговые двигатели широко применяются в приложениях, требующих точность. В отличие от двигателя постоянного тока у шагового двигателя отсутствуют щетки и коммутатор - для этого там несколько отдельных обмоток, которые коммутируются внешней электроникой (драйвером). Вращение ротора происходит за счет коммутации обмоток шаг за шагом, без обратной связи. Здесь проявляется и один недостаток шаговых двигателей - в случае механической перегрузки, когда ротор не двигается, шаги начинают путаться и движение становится неточным. По виду обмоток, шаговые двигатели разделяются на два типа: униполярные и биполярные шаговые двигатели. По строению их делят еще на три вида:
С переменным магнитным сопротивлением (высокая точность, низкий крутящий момент, низкая цена)
С постоянным магнитом (низкая точность, высокий крутящий момент, низкая цена)
Гибридный (высокая точность, высокий крутящий момент, высокая цена)
У шаговых двигателей с переменным магнитным сопротивлением зубчатые обмотки и зубчатый ротор из железа. Максимальная сила тяги возникает при перекрытии зубьев обоих сторон. В шаговых двигателях с постоянным магнитом, как следует из названия, есть постоянный магнит, который ориентируется в зависимости от полярности обмотки. В гибридных используются обе технологии.
Независимо от модели шагового двигателя для создания одного полного оборота вала (360 градусов) требуется сотня коммутационных шагов. Для обеспечения стабильного и плавного движения используют подходящую управляющую электронику, которая управляет двигателем в соответствии с его параметрами (инертность ротора, крутящий момент, резонанс и т.д.). Вдобавок в управляющей электронике можно применять различные методы коммутации. Коммутацию последовательно по одной обмотке называют полным шагом, но если коммутируется поочередно одна и две обмотки, то это называется полушагом. Используют так же синусоидальные микрошаги, что дает особую точность и плавность управления.
Униполярный шаговый двигатель

Обмотки униполярного шагового двигателя
Униполярный шаговый двигатель имеет пять или шесть проводов. В соответствии со схемой привода запускается разом только одна четвертая обмоток. Линии Vcc обычно соединяются с положительным питающим напряжением двигателя. Концы обмоток 1a, 1b, 2a, и 2b соединяются при коммутации через транзисторы только с землей, в связи, с чем их управляющая электроника довольно простая.
Биполярный шаговый двигатель

Обмотки биполярного шагового двигателя
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение. Униполярные шаговые двигатели можно запускать и с помощью биполярного драйвера: для этого нужно соединить только линии обмоток 1a, 1b, 2a и 2b (Vcc остается не соединенным).
Необходимые коммутации полного шага и полушага шаговых двигателей с обоими видами обмоток отображает следующая таблица. Так как в случае драйвера униполярного шагового двигателя происходит только отпирание транзисторов, то эти шаги представлены логическими числами 0 и 1. Управление биполярным шаговым двигателем может потребовать больше сигналов, и его шаги представлены выходной полярностью драйвера.
| 1 | 10 | 0 | 0 | +- | - | - |
| 2 | 0 | 10 | 0 | - | +- | - |
| 3 | 0 | 0 | 10 | - | - | +- |
| 4 | 0 | 0 | 0 | 1- | - | - | +
| 1 | 10 | 0 | 0 | +- | - | - |
| 2 | 1 10 | 0 | + +- | - | ||
| 3 | 0 | 10 | 0 | - | +- | - |
| 4 | 0 | 1 10 | - | + +- | ||
| 5 | 0 | 0 | 10 | - | - | +- |
| 6 | 0 | 0 | 1 1- | - | + +||
| 7 | 0 | 0 | 0 | 1- | - | - | +
| 8 | 10 | 0 | 1 +- | - | +
Цель упражнения запустить биполярный шаговый двигатель, вместо чего можно использовать по приведенному выше методу и униполярный двигатель. На плате модуля «Двигателя» имеются два драйвера L293D, которые управляются четырьмя входными выводами микроконтроллера. Каждый вывод обозначает один конец полярности обмотки. Напряжение конца обмотки положительное, если вывод высокий, и отрицательное, если вывод низкий. Концам 1A, 1B, 2A и 2B соответствуют выводы микроконтроллера PB0, PB1, PB2 и PB3.
Для управления биполярным шаговым двигателем в библиотеке Домашней Лаборатории есть функция bipolar_init, которая настраивает выводы выходом и функция bipolar_halfstep, которая совершает вращение на определенное количество полушагов. Коммутация происходит по таблице полушагов, но используются более сложные битовые операции.
// // Подготовка управления биполярного шагового двигателя // void bipolar_init(void) { DDRB |= 0x0F; PORTB &= 0xF0; } // // Передвижение биполярного шагового двигателя полушагами // void bipolar_halfstep(signed char dir, unsigned short num_steps, unsigned char speed) { unsigned short i; unsigned char pattern, state1 = 0, state2 = 1; // Утверждение направления +- 1 dir = ((dir < 0) ? -1 : +1); // Осуществление полушагов for (i = 0; i < num_steps; i++) { state1 += dir; state2 += dir; // Создание шаблона pattern = (1 << ((state1 % 8) >> 1)) | (1 << ((state2 % 8) >> 1)); // Обозначение выхода PORTB = (PORTB & 0xF0) | (pattern & 0x0F); // Создание паузы для ожидания выполнения шага sw_delay_ms(speed); } // Остановка двигателя PORTB &= 0xF0; }Использование функций демонстрирует пример программы, которая поворачивает двигатель попеременно в одну и другую сторону на 200 полушагов. Скорость вращения двигателя определяет длинна паузы, создаваемая между шагами. Если паузу настроить слишком маленькой, то двигатель не успевает осуществлять вращение в связи с инертностью ротора и вал не двигается.
// // Тест-программа биполярного шагового двигателя // модуля «Двигатели» Домашней Лаборатории // #include <homelab/module/motors.h> // // Основная программа // int main(void) { // Настройка двигателя bipolar_init(); // Бесконечный цикл while (true) { // Вращение в одну сторону 200 полушагов со скоростью 30 мс/шаг bipolar_halfstep(+1, 200, 30); // Вращение в другую сторону 200 полушагов со скоростью 30 мс/шаг bipolar_halfstep(-1, 200, 30); } }home.roboticlab.eu
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток. На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» - «½» - «1» (как на картинке), а «0» - «¼» - «½» - «¾» - «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления - доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
wiki.iarduino.ru
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).

Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
Диаграммы, диаграммы...
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис 8а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.

Рис. 8. Различные способы управления фазами шагового двигателя.
Второй способ - управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. 8б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. 8в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Держи его!
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Нужно отметить, что эти положения ротор принимает при работе двигателя, но положение ротора не может сохраняться неизменным после выключения тока обмоток. Поэтому при включении и выключении питания двигателя ротор будет смещаться на пол-шага. Для того, чтобы он не смещался при остановке, необходимо подавать в обмотки ток удержания. То же справедливо и для полушагового и микрошагового режимов. Следует отметить, что если в выключенном состоянии ротор двигателя поворачивался, то при включении питания возможно смещение ротора и на большую, чем половина шага величину.
Ток удержания может быть меньше номинального, так как от двигателя с неподвижным ротором обычно не требуется большого момента. Однако есть применения, когда в остановленном состоянии двигатель должен обеспечивать полный момент, что для шагового двигателя возможно. Это свойство шагового двигателя позволяет в таких ситуациях обходиться без механических тормозных систем. Поскольку современные драйверы позволяют регулировать ток питания обмоток двигателя, задание необходимого тока удержания обычно не представляет проблем. Задача обычно заключается просто в соответствующей программной поддержке для управляющего микроконтроллера.
Полушаговый режим
Основным принципом работы шагового двигателя является создание вращающегося магнитного поля, которое заставляет ротор поворачиваться. Вращающееся магнитное поля создается статором, обмотки которого соответствующим образом запитываются.
Для двигателя, у которого запитана одна обмотка, зависимость момента от угла поворота ротора относительно точки равновесия является приблизительно синусоидальной. Эта зависимость для двухобмоточного двигателя, который имеет N шагов на оборот (угол шага в радианах S = (2*pi)/N), показана на рис. 9.

Рис. 9. Зависимость момента от угла поворота ротора для одной запитанной обмотки.
Реально характер зависимости может быть несколько другой, что объясняется неидеальностью геометрии ротора и статора. Пиковое значение момента называется моментом удержания. Формула, описывающая зависимость момента от угла поворота ротора, имеет следующий вид:
T = - Th*sin((pi/2)/S)*Ф),
где T – момент, Th – момент удержания, S – угол шага, Ф – угол поворота ротора.
Если к ротору приложить внешний момент, который превышает момент удержания, ротор провернется. Если внешний момент не превышает момента удержания, то ротор будет находится в равновесии в пределах угла шага. Нужно отметить, что у обесточенного двигателя момент удержания не равен нулю вследствие действия постоянных магнитов ротора. Этот момент обычно составляет около 10% максимального момента, обеспечиваемого двигателем.
Иногда используют термины «механический угол поворота ротора» и «электрический угол поворота ротора». Механический угол вычисляется исходя из того, что полный оборот ротора составляет 2*pi радиан. При вычислении электрического угла принимается, что один оборот соответствует одному периоду угловой зависимости момента. Для приведенных выше формул Ф является механическим углом поворота ротора, а электрический угол для двигателя, имеющего 4 шага на периоде кривой момента, равен ((pi/2)/S)*Ф или (N/4)*Ф, где N – число шагов на оборот. Электрический угол фактически определяет угол поворота магнитного поля статора и позволяет строить теорию независимо от числа шагов на оборот для конкретного двигателя.
Если запитать одновременно две обмотки двигателя, то момент будет равен сумме моментов, обеспечиваемых обмотками по отдельности (рис. 10).

Рис. 10. Зависимость момента от угла поворота ротора для двух запитанных обмоток.
При этом, если токи в обмотках одинаковы, то точка максимума момента будет смещена на половину шага. На половину шага сместится и точка равновесия ротора (точка e на рисунке). Этот факт и положен в основу реализации полушагового режима. Пиковое значение момента (момент удержания) при этом будет в корень из двух раз больше, чем при одной запитанной обмотке.
Th3 = 2 0.5*Th2,
где Th3 – момент удержания при двух запитанных обмотках, Th2 – момент удержания при одной запитанной обмотке.
Именно этот момент обычно и указывается в характеристиках шагового двигателя.
Величина и направление магнитного поля показаны на векторной диаграмме (рис. 11).

Рис. 11. Величина и направление магнитного поля для разных режимов питания фаз.
Оси X и Y совпадают с направлением магнитного поля, создаваемого обмотками первой и второй фазы двигателя. Когда двигатель работает с одной включенной фазой, ротор может занимать положения 1, 3, 5, 7. Если включены две фазы, то ротор может занимать положения 2, 4, 6, 8. К тому же, в этом режиме больше момент, так как он пропорционален длине вектора на рисунке. Оба эти метода управления обеспечивают полный шаг, но положения равновесия ротора смещены на пол-шага. Если скомбинировать два этих метода и подать на обмотки соответствующие последовательности импульсов, то можно заставить ротор последовательно занимать положения 1, 2, 3, 4, 5, 6, 7, 8, что соответствует половинному шагу.
По сравнению с полношаговым режимом, полушаговый режим имеет следующие преимущества:
Недостатком полушагового режима является довольно значительное колебание момента от шага к шагу. В тех положениях ротора, когда запитана одна фаза, момент составляет примерно 70% от полного, когда запитаны две фазы. Эти колебания могут явиться причиной повышенных вибраций и шума, хотя они всё равно остаются меньшими, чем в полношаговом режиме.
Способом устранения колебаний момента является поднятие момента в положениях с одной включенной фазой и обеспечение таким образом одинакового момента во всех положениях ротора. Это может быть достигнуто путем увеличения тока в этих положениях до уровня примерно 141% от номинального. Некоторые драйверы, такие как PBL 3717/2 и PBL 3770A фирмы Ericsson, имеют логические входы для изменения величины тока. Нужно отметить, что величина 141% является теоретической, поэтому в приложениях, требующих высокой точности поддержания момента эта величина должна быть подобрана экспериментально для конкретной скорости и конкретного двигателя. Поскольку ток поднимается только в те моменты, когда включена одна фаза, рассеиваемая мощность равна мощности в полношаговом режиме при токе 100% от номинального. Однако такое увеличение тока требует более высокого напряжения питания, что не всегда возможно. Есть и другой подход. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы. Для получения постоянного момента этот ток должен составлять 70.7% от номинального. Таким образом реализует полушаговый режим, например, микросхема драйвера A3955 фирмы Allegro.
Для полушагового режима очень важным является переход в состояние с одной выключенной фазой. Чтобы заставить ротор принять соответствующее положение, ток в отключенной фазе должен быть уменьшен до нуля как можно быстрее. Длительность спада тока зависит от напряжения на обмотке в то время, когда она теряет свою запасенную энергию. Замыкая в это время обмотку на источник питания, который представляет максимальное напряжение, имеющееся в системе, обеспечивается максимально быстрый спад тока. Для получения быстрого спада тока при питании обмоток двигателя H-мостом все транзисторы должны закрываться, при этом обмотка через диоды оказывается подключенной к источнику питания. Скорость спада тока значительно уменьшится, если один транзистор моста оставить открытым и закоротить обмотку на транзистор и диод. Для увеличения скорости спада тока при управлении униполярными двигателями подавление выбросов ЭДС самоиндукции предпочтительнее осуществлять не диодами, а варисторами или комбинацией диодов и стабилитрона, которые ограничат выброс на большем, но безопасном для транзисторов уровне.
Микрошаговый режим
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. К тому же меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.

Рис. 12. Зависимость момента от угла поворота ротора в случае разных значений тока фаз.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 12), то результирующий момент будет
Th = ( a2 + b2 )0.5,
а точка равновесия ротора сместится в точку
x = ( S / (pi/2) ) arctan( b / a ),
где a и b – момент, создаваемый первой и второй фазой соответственно, Th – результирующий момент удержания, x – положение равновесия ротора в радианах, S – угол шага в радианах.
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима. Ещё раз нужно отметить, что приведенные выше формулы верны только в том случае, если зависимость момента от угла поворота ротора синусоидальная и если ни одна часть магнитной цепи двигателя не насыщается.
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Для этого токи его фаз должны быть синусоидальными, сдвинутыми друг относительно друга на 90 град.
Результатом использования микрошагового режима является намного более плавное вращение ротора на низких частотах. На частотах в 2 – 3 раза выше собственной резонансной частоты ротора и нагрузки, микрошаговый режим дает незначительные преимущества по сравнению с полу- или полношаговым режимами. Причиной этого является фильтрующее действие инерции ротора и нагрузки. Система с шаговым двигателем работает подобно фильтру нижних частот. В микрошаговом режиме можно осуществлять только разгон и торможение, а основное время работать в полношаговом режиме. К тому же, для достижения высоких скоростей в микрошаговом режиме требуется очень высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Для предотвращения переходных процессов и потери шагов, переключения режимов работы двигателя (из микрошагового режима в полношаговый и т.п.) необходимо производить в те моменты, когда ротор находится в положении, соответствующем одной включенной фазе. Некоторые микросхемы драйверов микрошагового режима имеют специальный сигнал, который информирует о таком положении ротора. Например, это драйвер A3955 фирмы Allegro.
Во многих приложениях, где требуются малые относительные перемещения и высокая разрешающая способность, микрошаговый режим способен заменить механический редуктор. Часто простота системы является решающим фактором, даже если при этом придется применить двигатель больших габаритов. Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров. Это позволяет сделать практически одинаковой стоимость оборудования для полношагового и микрошагового режимов.
Иногда микрошаговый режим используется для увеличения точности величины шага сверх заявленной производителем двигателя. При этом используется номинальное число шагов. Для повышения точности используется коррекция положения ротора в точках равновесия. Для этого сначала снимают характеристику для конкретного двигателя, а затем, изменяя соотношение токов в фазах, корректируют положение ротора индивидуально для каждого шага. Такой метод требует предварительной калибровки и дополнительных ресурсов управляющего микроконтроллера. Кроме того, требуется датчик начального положения ротора для синхронизации его положения с таблицой корректирующих коэффициентов.
На практике при осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и от схемы драйвера. Во многих приложениях такие колебания являются нежелательными. Избавиться от этого явления можно путем использования микрошагового режима. На рис. 13 показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.

Рис. 13. Перемещения ротора в полношаговом и микрошаговом режимах.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз. На практике существуют некоторые факторы, ограничивающие точность работы привода в микрошаговом режиме. Некоторые из них относятся к драйверу, а некоторые непосредственно к двигателю.
Обычно производители шаговых двигателей указывают такой параметр, как точность шага. Точность шага указывается для положений равновесия ротора при двух включенных фазах, токи которых равны. Это соответствует полношаговому режиму с перекрытием фаз. Для микрошагового режима, когда токи фаз не равны, никаких данных обычно не приводится.
Идеальный шаговый двигатель при питании фаз синусоидальным и косинусоидальным током должен вращаться с постоянной скоростью. У реального двигателя в таком режиме будут наблюдаться некоторые колебания скорости. Связано это с нестабильностью воздушного зазора между полюсами ротора и статора, наличием магнитного гистерезиса, что приводит к погрешностям величины и направления магнитного поля и т.д. Поэтому положения равновесия и момент имеют некоторые отклонения. Эти отклонения зависят от погрешности формы зубцов ротора и статора и от примененного материала магнитопроводов.
Конструкция некоторых двигателей оптимизирована для наилучшей точности в полношаговом режиме и максимального момента удержания. Специальная форма зубцов ротора и статора спроектирована так, чтобы в положении равновесия для полношагового режима магнитный поток сильно возрастал. Это приводит к ухудшению точности в микрошаговом режиме. Лучшие результаты позволяют получить двигатели, у которых момент удержания в обесточенном состоянии меньше.
Отклонения можно разделить на два вида: отклонения величины магнитного поля, которые приводят к отклонениям момента удержания в микрошаговом режиме и отклонения направления магнитного поля, которые приводят к отклонениям положения равновесия. Отклонения момента удержания в микрошаговом режиме обычно составляют 10 – 30% от максимального момента. Нужно сказать, что и в полношаговом режиме момент удержания может колебаться на 10 – 20 % вследствие искажений геометрии ротора и статора.
Если измерить положения равновесия ротора при вращении двигателя по и против часовой стрелки, то получатся несколько разные результаты. Этот гистерезис связан в первую очередь с магнитным гистерезисом материала сердечника, хотя свой вклад вносит и трение. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. Погрешность, создаваемая гистерезисом может быть равна нескольким микрошагам. Поэтому в высокоточных приложениях при движении в одном из направлений нужно проходить за желаемую позицию, а затем возвращаться назад, чтобы подход к нужной позиции всегда осуществлялся в одном направлении.
Вполне естественно, что любое желаемое увеличение разрешающей способности наталкивается на какие-то физические ограничения. Не стоит думать, что точность позиционирования для 7.2 град. двигателя в микрошаговом режиме не уступает точности 1.8 град. двигателя.
Препятствием являются следующие физические ограничения:
Эти проблемы наиболее ярко выражены для двигателей с большим количеством полюсов. Существуют однако двигатели, ещё на этапе разработки оптимизированные для работы в микрошаговом режиме. Полюса ротора и статора таких двигателей менее выражены благодаря скошенной форме зубцов.
Еще один источник погрешностей позиционирования – это ошибка квантования ЦАП, с помощью которого формируются токи фаз. Дело в том, что ток должен формироваться по синусоидальному закону, поэтому для минимизации погрешности линейный ЦАП должен иметь повышенную разрядность. Существуют специализированные драйверы со встроенным нелинейным ЦАПом, который позволяет сразу получать осчеты функции sin. Примером может служить драйвер A3955 фирмы Allegro, который имеет встроенный 3-х разрядный ЦАП, который обеспечивает следующие значения тока фаз: 100%, 92.4%, 83.1%, 70.7%, 55.5%, 38.2%, 19.5%, 0%. Это позволяет работать в микрошаговом режиме с величиной шага 1/8, при этом погрешность установки тока фаз не превышает 2%. Кроме того, этот драйвер имеет возможность управлять скоростью спада тока обмоток двигателя во время работы, что позволяет произвести «тонкую подстройку» драйвера под конкретный двигатель для получения наименьшей погрешности позиционирования.
Даже если ЦАП точно сформировал синусоидальное опорное напряжение, его нужно усилить и превратить в синусоидальный ток обмоток. Многие драйверы имеют значительную нелинейность вблизи нулевого значения тока, что вызывает значительные искажения формы и, как следствие, значительные ошибки позиционирования. Если используются высококачественные драйверы, например PBM3960 и PBL3771 фирмы Ericsson, погрешность, связанная с драйвером исчезающе мала по сравнению с погрешностью двигателя.
Иногда контроллеры шаговых двигателей позволяют корректировать форму выходного сигнала путем добавления или вычитания из синуса его третьей гармоники. Однако такая подстройка должна производится индивидуально под конкретный двигатель, характеристики которого должны быть перед этим измерены.
Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения (особенно на очень низких скоростях), для устранения шума и явления резонанса. Микрошаговый режим также способен уменьшить время установления механической системы, так как в отличие от полношагового режима отсутствуют выбросы и осцилляции. Однако в большинстве случаев для обычных двигателей нельзя гарантировать точного позицианирования в микрошаговом режиме.
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. Некоторые из них, например A3955, A3957 фирмы Allegro, уже содержат ЦАП и требуют о микроконтроллера только цифровых кодов. Другие же, такие как L6506, L298 фирмы SGS-Thomson, требуют внешних опорных напряжений синусоидальной формы, которые должен формировать микроконтроллер с помощью ЦАПов. Нужно сказать, что слишком большое количество дискретов синуса не приводит к повышению точности позиционирования, так как начинает доминировать ошибка, связанная с неидеальностью геометрии полюсов двигателя. Тем более, в этом случае отсчеты должны следовать с большой частотой, что является проблемой при их программном формировании. При работе на больших скоростях разрешающую способность ЦАПов можно уменьшить. Более того, при очень больших скоростях вообще рекомендуется работать в обычном полношаговом режиме, так как управление гармоническим сигналом теряет преимущества. Происходит это по той причине, что обмотки двигателя представляют собой индуктивность, соответственно любая конкретная схема драйвера с конкретным напряжением питания обеспечивает вполне определенную максимальную скорость нарастания тока. Поэтому при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной.
megalektsii.ru
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
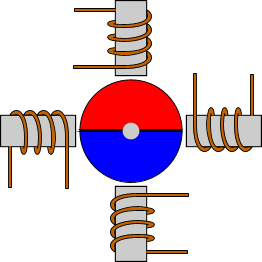
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
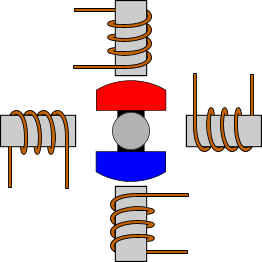
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.

Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
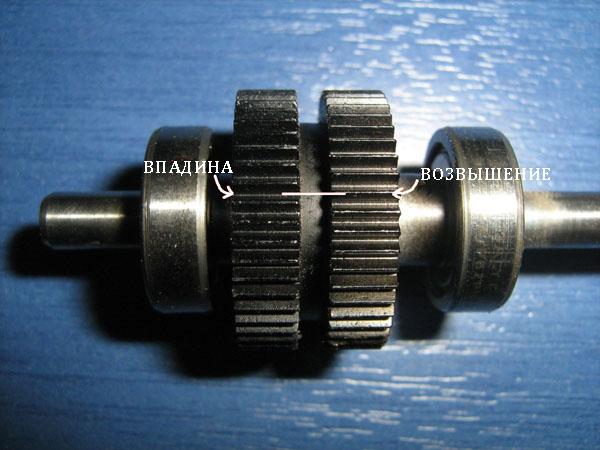
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
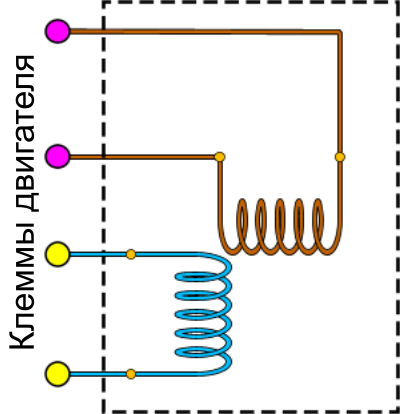
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
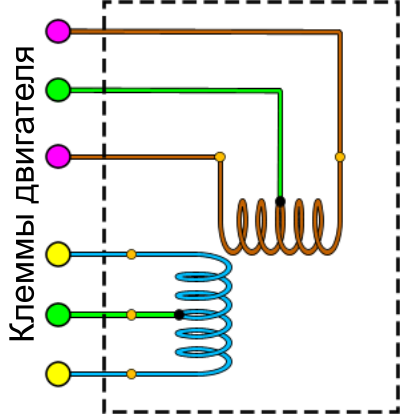
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
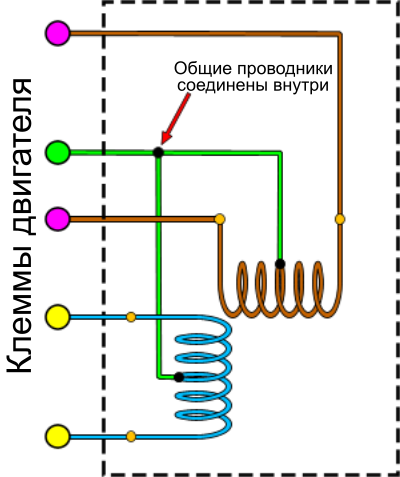
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
ckep.umi.ru
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 7а).

Рис. 7. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 7б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 7в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Биполярный или униполярный?
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля - это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствии омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление - соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
Ссылки по теме:www.texnologia.ru
12 ноября
С
итуация изменилась после того, как ON Semiconductor приобрела в декабре 2007 г. компанию AMI Semiconductor (AMIS), широко известную разработкой и производством заказных и специализированных ИС для автомобильного, медицинского и промышленного секторов рынка. Продукция этой фирмы характеризуется высоким качеством и уровнем интеграции аналоговой и цифровой технологий. Разработки AMI Semiconductor сохранили свой индекс в названиях — AMIS, но теперь выпускаются под брендом ON Semi. Одной из удачных разработок компании в 2005 г. стала серия драйверов для шаговых двигателей AMIS-30xx. По сути, она ознаменовала очередной этап эволюции архитектуры и технологии драйверов шаговых двигателей (ШД). Для того чтобы по достоинству оценить уровень разработок AMIS, рассмотрим процесс эволюции микросхем для ШД от различных производителей.
Шаговые двигатели были разработаны в начале 1960 гг. как более дешевая альтернатива позиционным сервоприводам для применения на растущем рынке периферийных компьютерных устройств. Главное преимущество ШД — обеспечение точного позиционирования без применения датчиков положения обратной связи. Это преимущество значительно снизило цену систем приводов компьютерной периферии и сделало ее массовым и доступным изделием. По мере совершенствования параметров, удешевления производства, а также упрощения и удешевления схем управления шаговые двигатели завоевали популярность и в других приложениях.
Униполярные двигатели проще в управлении и требуют меньше управляющих элементов. Ранее этот фактор имел решающее значение в цене готового решения. После того, как значительно повысился уровень интеграции и снизилась цена микросхем драйверов, униполярные шаговые двигатели потеряли это преимущество. Если сравнивать их между собой, то биполярный ШД имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент, который пропорционален магнитному полю, создаваемому обмотками статора. Именно биполярные шаговые двигатели в основном выпускаются производителями.
Двигатель имеет две обмотки, каждая из которых управляется мостовой схемой ключей. На рисунке 1 показана базовая схема управления биполярным шаговым двигателем.Для требуемой фазировки токов через обмотки внешняя схема должна обеспечить синхронное управление ключами двух мостовых схем. Первые схемы управления шаговыми двигателями были реализованы полностью на дискретных элементах и микросхемах комбинационной логики.
 |
Рис. 1. Базовая схема управления биполярным шаговым двигателем |
Первым этапом интеграции стала реализация в одном корпусе элементов моста и простой логики управления его ключами. Примером такой микросхемы является UC3717 фирмы Unitrode (в настоящее время часть TI), которая была разработана до 1995 г. Для управления двигателем требовалось использовать две такие микросхемы и внешний контроллер шаговых перемещений. Применялся линейный токовый режим с большими потерями мощности на обмотках и биполярных транзисторах. Компания Infineon примерно в то же время (1996 г.) стала выпускать микросхему драйвера SAA1042, в котором были интегрированы сразу две мостовых схемы, логика управления двумя мостовыми схемами, тактовый генератор, логика управления поворота на шаг и полшага, а также защитные диоды. К тому же времени компания Motorola разработала драйвер MC3479, аналогичный по структуре SAA1042.
В структуру драйвера стали вводить датчики выходного тока для слежения за токовой перегрузкой в мостовых схемах. Примером такого драйвера явилась микросхема TLE4729G Infineon. Контроль тока производился отдельно в каждом мосту (в нижнем плече) через внешний резистивный датчик. Сигналы перегрузки по каждому каналу управления обмотками были доступны внешнему управляющему контроллеру в виде сигналов ошибки (открытый коллектор).
На следующем этапе эволюции структуры драйвера для снижения потерь в мостовых схемах биполярные транзисторы заменили на DMOS. Кроме того, стал использоваться метод ШИМ токового управления, который позволил значительно уменьшить рассеиваемую на драйвере мощность. В структуре драйвера появились схемы защиты от перегрузки по току и перегрева кристалла, схемы обнаружения обрыва обмоток и короткого замыкания. Был добавлен режим энергосбережения.
На рисунке 2 показаны диаграммы сигналов управления обмотками шагового биполярного двигателя для различных режимов. Обычно используется полношаговый или полушаговый режимы. Драйверы для их поддержки существенно проще и дешевле.
 |
Рис. 2. Диаграммы сигналов для управления шаговым двигателем |
На следующем этапе в структуру драйвера была добавлена логика, которая упростила управление двигателем и снизила нагрузку на внешний контроллер. Отныне для управления вращением вала на один шаговый угол требовались всего два сигнала — сигнал направления DIR и тактовый сигнал CLK (или NXT), задающий скорость вращения. Этот интерфейс впервые появился у драйверов Allegro Microsystems и в дальнейшем стал использоваться в драйверах других производителей.
Шаговые двигатели имеют ряд особенностей управления, связанных с инерционностью вала двигателя с нагрузкой и дискретностью движений вала. После выполнения каждого шага под управлением токовых импульсов, поданных на обмотки, производилась фиксация вала за счет закорачивания цепей обмоток (режим Slow) или переполюсовки сигналов для более быстрой фиксации (Fast) (см. рис. 3).
 |
Рис. 3. Режимы переключения мостовой схемы драйвера |
После оценки сигнала обратной связи можно выработать стратегию для изменения параметров управляющих сигналов. Например, если ситуация соответствует зоне проскока на шаг вперед, значит, для данного скоростного режима недостаточна сила торможения. В этом случае можно уменьшить ток активной фазы или использовать режим быстрого торможения. В руководстве по драйверам приводятся методики для выбора оптимальных параметров управления. Для адаптации параметров управляющих сигналов под конкретные параметры двигателя и режим движения, а также возможности динамической подстройки параметров сигналов для устранения потери шага, резонансного эффекта, повышения динамики на больших скоростях был добавлен последовательный интерфейс и соответствующие схемы цифровой регулировки параметров. Параметры загружались в соответствующие режимные регистры. Этот уровень был впервые использован в микросхемах драйверов Allegro Microsystems, а затем появился в структурах драйверов STMicroelectronics, TI, Infineon.
К началу разработки компанией AMIS своей архитектуры драйверов на рынке уже присутствовали драйверы шаговых двигателей, которые имели, с одной стороны, достаточно высокий уровень интеграции, а с другой — набор функциональных параметров, обеспечивавших реализацию оптимальной и дешевой схемы управления. В качестве примера такого драйвера можно привести драйвер-контроллер А3992 Allegro Microsystems. Для его управления использовался ШИМ, в мостовых схемах — полевые ключи; были реализованы различные типы защит от перегрузок. Загрузка параметров и управление движением производилась через последовательный интерфейс. Поддерживался режим микрошага. В обеих мостовых схемах использовались два внешних резистивных токовых датчика для контроля перегрузки. Для улучшения формы кривой при микрошаговом режиме в А3977 применялось автоматическое изменение режима спада тока в зависимости от текущего микрошага (Mixed Decay Mode).
При ее разработке требовалось создать модульную архитектуру для реализации линейки микросхем с функциональными параметрами, ориентированными на различные варианты применения с разными уровнями цен. Степень интеграции и функциональности должна была соответствовать лучшим на то время образцам интегральных драйверов-контроллеров. В архитектуре требовались модули, обеспечивавшие расширенные функциональные возможности. На рисунке 4 показана модульная архитектура линейки драйверов AMIS-30xxx.
 |
Рис. 4. Архитектура микросхем драйверов AMIS-30xxx |
|
Характеристика |
Линейка драйверов | ||||||
|
|
30511 |
30512 |
30521 |
30522 |
30622 |
30623 |
30624 |
|
Диапазон напряжений питания, В |
6...30 |
8...29 |
6...30 | ||||
|
Средний выходной ток, А |
0,4 |
0,8 |
0,4 |
0,57 |
0,4 | ||
|
Импульсный выходной ток, А |
0,8 |
0,8 |
1,6 |
1,6 |
0,8 | ||
|
RDS(on) (25°С), Ом |
0,45 |
0,5 | |||||
|
Частота коммутации ШИМ, кГц |
45 | ||||||
|
Контроллер позиционирования |
Нет |
Есть | |||||
|
Макс. уровень дискретности режима микрошага |
1/32 |
1/16 | |||||
|
Интерфейс |
SPI |
I2C |
LIN |
I2C | |||
|
Встроенный стабилизатор напряжения (5 В) для питания внешних схем |
- |
Есть |
- |
Есть | |||
|
Рабочий температурный диапазон, °C |
-40...125 | ||||||
|
Типы корпусов |
SOIC24 |
NQFP32 |
SOIC20 |
SOIC20, NQFP32 |
SOIC20 | ||
Первая серия микросхем AMIS-305xx (см. рис. 5) имеет простой пошаговый режим управления движения валом. При разработке большинства современных приложений она может служить отличной и недорогой альтернативой драйверам Allegro Microsystems, Infineon, Toshiba, TI, National Semiconductor, ROHM, обеспечивая функциональную совместимость. Их интерфейс управления образован последовательным портом SPI для конфигурирования и мониторинга и специализированными линиями ввода-вывода, в т.ч. для управления ШД.
 |
Рис. 5. Структурная схема ASSP AMIS-305xx |
Серия имеет три характерных отличия от AMIS-305xx:1) в микросхеме через последовательный интерфейс реализована поддержка управления движением на уровне команд позиционирования; 2) в структуре имеется контроллер позиционирования, состоящий из программируемых счетчиков и регистров;3) слежение за рассогласованием угла вала выполняется автоматически и не требует дополнительной программной поддержки. Используется тот же сигнал противо-ЭДС и интегрированный автомат, изменяющий динамические параметры сигналов управления.
 |
Рис. 6. Структурная схема драйвера |
Драйвер AMIS-306xx управляется командами высокого уровня, которые подаются через I2C или LIN-интерфейс. Алгоритм управления AMIS-306XX реализован в виде конечного автомата, т.е. разработчику следует подать команду переместить двигатель в определенное положение, предварительно задав необходимое ускорение и максимальную скорость, а также требуемый размер микрошага.
Определяются рядом уровней нарастающих или спадающих напряжений, которые будут использоваться при выполнении соответствующей фазы по команде, поданной через сетевой интерфейс. Хост-контроллер при этом освобождается от локального контроля данных процессов. Для контроля используется встроенный запрограммированный пользователем автомат. Заданы начальные и конечные точки процессов, определены ряды значений, устанавливающие степень ускорения и торможения.
Следует учесть, что драйверы AMIS-306xx стоят дороже, чем AMIS-305xx. Выбор за разработчиком. Собственно, наличие счетчика числа шагов не всегда облегчает задачу, если в устройстве так или иначе используется микроконтроллер либо DSP. Расчет траектории производится программно. В большинстве приложений ресурс управляющего микроконтроллера достаточен для того, чтобы решать сложные задачи в реальном масштабе времени. Поскольку не во всех случаях потребуются предельные режимы движения шагового двигателя, то не понадобится и сложный алгоритм управления динамическими параметрами драйвера. Реализованный в микросхеме интерфейс SPI можно использовать для задания таких параметров драйвера как амплитуда тока, шаговый режим, частота ШИМ. Микросхема драйвера, в свою очередь, передает в микроконтроллер статусы флагов состояния. В состав обоих семейств драйверов шаговых двигателей ON Semiconductor входит обратная связь, которая позволяет сравнивать электрическое и расчетное положение ротора, что можно использовать для контроля функционирования двигателя. Драйвер AMIS-30621 идеально подходит для позиционирования подвижных элементов небольших устройств. Его основные приложения: коррекция угла наклона ламп в автомобильных фарах, кондиционеры, привод холостого хода двигателей, механика систем круиз-контроля, промышленное оборудование, устройства домашней автоматизации.
Достигнутый благодаря новой технологии уровень интеграции позволил получить миниатюрный драйвер и уменьшить число сигналов управления. Возможность объединения в одной ИС аналоговых и силовых каскадов на повышенные напряжения, а также низковольтных цифровых каскадов сделало возможным появление полностью интегрированных контроллеров ШД. Собственно двигатель получил цифровой интерфейс. Реализованные на базе таких ИС платы контроллеров обладают столь малыми размерами, что становятся частью двигателя, который в таком случае можно назвать интеллектуальным. Для реализации концепции умного двигателя нашлись и партнеры. Достигнута предварительная договоренность с крупнейшими производителями биполярных шаговых двигателей японских фирм NMB (Nippon Minebea), Shinano Kenshi, Oriental Motors, Nidec Servo Corp., Moons о заказе драйверов AMIS. Впечатляет и объем выпуска шаговых двигателей этими фирмами — свыше 100 млн шт. в год! В программе выпуска будут использоваться драйверы AMIS30624 (i2C), AMIS30623 (LIN) и AMIS-30523 (CAN). Своими разработками AMI Semiconductor значительно расширила спектр предложений для данного сегмента рынка, получив реальные шансы потеснить на рынке драйверов шаговых двигателей других крупнейших производителей.
Вы можете скачать эту статью в формате pdf здесь.
www.russianelectronics.ru