Получение вращающегося магнитного поля
Условия получения:
наличие не менее двух обмоток;
токи в обмотках должны отличаться по фазе
оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (p=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (p=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (p=1) (рис. 2.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA,BB,BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе A (φA) равной нулю, можно записать:
| BA=Bmsin(ωt), BB=Bmsin(ωt−120°), BC=Bmsin(ωt−240°). |
Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.
 .
.
Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.
| а) При t=0 | б) При | в) При |
|
|
|
|
|
|
|
|
|
|
|
|
 Рис. 2.8
Рис. 2.8
Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции
B=3/2×Bm.
Частота вращения магнитного поля n0 зависит от частоты сети f и числа пар полюсов магнитного поля p.
n0=(60f)/p, [об/мин].
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω0, которая определяется соотношением:
ω0=(2πf)/p=πn0/30, [рад/сек].
26. Принцип действия асинхронного двигателя.
Принцип действия электрических машин переменного тока основан на физических законах взаимодействия магнитного поля и помещенного в это поле проводника, по которому проходит электрический ток, а также на явлениях, возникающих при движении этого проводника в магнитном поле.
По своему назначению электрические машины разделяются на генераторы и двигатели. Генераторы преобразуют механическую энергию в электрическую и предназначаются для генерирования электрического тока. Двигатели преобразуют электрическую энергию в механическую и являются потребителями электроэнергии, так называемой двигательной нагрузкой генераторов пли электрической сети.
Для лучшего понимания принципов, на которых основана работа современного асинхронного электродвигателя, рассмотрим известный опыт Фарадея (рис. 1). В этом опыте некоторый постоянный магнит М с полюсами N — S приводится во вращение механически с помощью рукоятки Р. На сравнительно небольшом расстоянии от полюсов магнита устанавливается легкий медный диск Д на оси, которая может вращаться в подшипниках. При вращении рукоятки и соответственно магнита в медном диске наводятся токи, которые, взаимодействуя с магнитным полем N— S, обеспечивают появление вращающего момента. Под влиянием этого момента диск увлекается в сторону вращения магнита. Таким образом, диск Фарадея является прототипом современного асинхронного электродвигателя.
Если в магнитное поле поместить прямолинейный проводник перпендикулярно направлению поля и пропустить через него ток I, то на него будет действовать механическая сила F, прямо пропорциональная силе (интенсивности) магнитного поля, количественно определяемого магнитной индукцией В, длине l и току I, Н:
(1)
F = l,02 ∙ 10-13BlI,
где В—магнитная индукция, Т; l — длина той части проводника, которая находится в магнитном поле, м; I— сила тока, проходящего по проводнику, А.
Численный коэффициент 1,02 ∙ 10-13 в правой части уравнения определяет размерность полученного значения. В нашем случае мы получим значение действующей на проводник силы
|
|
| Рис. 1. Опыт Фарадея с диском. |
в ньютонах (Н).
Таким образом, электромагнитный механизм любой электрической машины должен содержать две основные части: устройство, содержащее магнитное поле, и совокупность проводников, пересекающих линии магнитного поля. В машинах электрическое поле обычно создается с помощью стальных сердечников с намотанными на них катушками. По этим катушкам проходит электрический ток и создает, таким образом, магнитное поле большой интенсивности.
Рассмотрим теперь образование магнитного (поля с помощью переменного тока, преходящего по витку катушки, имеющему форму, показанную на рис. 2,а. Промышленная сеть переменного тока обычно обеспечивает синусоидальную форму тока. На рис. 2,в изображена кривая изменения тока в рассматриваемом контуре по времени. Как видно из графика, величина тока имеет один знак, принятый положительным, на участке от 0 до t1, а затем противоположный, отрицательный знак на участке от t1 до t2 по оси времени. Максимальные величины тока Iмакс достигаются в моменты времени t' и t''.
При прохождении тока по проводнику образуется магнитное поле, направление силовых линий которого показано на рис. 2,б в плоскости, перпендикулярной контуру с током. Условно направление тока от плоскости чертежа к читателю обозначено точкой О•, а противоположное направление — крестиком О+. Пунктиром показан постоянный магнит, обеспечивающий аналогичное магнитное поле, как и контур с током в момент времени t'. Для любого другого момента времени на участке 0 — t1 магнитное поле будет иметь то же направление, но по величине оно будет слабее (например, в момент времени t''). Далее на участке характеристики t1— t2 (рис. 2,в) направление магнитных силовых линий поля (рис. 2,б) меняется на противоположное в соответствии с изменением знака, т. е. направление тока в контуре (противоположное по сравнению с изображенным на рис. 2,б) также изменится на противоположное.
|
| Рис.2. Образование пульсирующего магнитного поля контуром с током. а — контур с током; б — магнитное поле контура; в — изменение тока в контуре во времени. |
Таким образом, при питании контура переменным током направление и величина (интенсивность) магнитного поля, образованного этим витком, периодически изменяются. Такое магнитное поле получило название пульсирующего.
Выше был рассмотрен случай образования магнитного поля при питании контура однофазным переменным током. На практике асинхронные двигатели, как правило, питаются трехфазным переменным током. Трехфазная цепь переменного тока состоит из трех однофазных цепей. В этих цепях токи или напряжения изменяются по тому же периодическому закону с той же частотой, но с некоторым сдвигом (отставанием) во времени. Величина отставания тока во второй фазе по сравнению с током в первой фазе составляет 1/3 периода Т, или 120°. Ток в третьей фазе также отстает от тока во второй фазе на 1/3 периода.
На рис. 3,б показано образование магнитного поля с помощью трех контуров, сдвинутых относительно друг друга на 120° и питающихся от трехфазной сети переменного тока. На рис. 3,а показан характер прохождения токов в каждой фазе, т. е. в каждом из контуров. Обозначение направлений токов на рис. 3,б (точка или крестик) соответствует принятому нами на рис. 2. Токи считаются положительными, если они имеют направления из плоскости чертежа (обозначено точкой) в началах контуров с током в фазах Ан, Вн, Сн и одновременно направление в плоскость чертежа (обозначено крестиком) в концах контуров фаз Ак , Вк , Ск .
|
|
| Рис. 3. Образование вращающегося магнитного поля трехфазным током. а —изменение фазных токов во времени; б —магнитное поле в разные моменты времени. |
Такой случай, соответствующий моменту времени t1, показан на верхнем примере рис. 3,б. Пользуясь известным из физики правилом буравчика, можно построить силовые линии создаваемого магнитного поля токов. Направление этих силовых линий будет аналогично направлению силовых линий поля, создаваемого с помощью постоянного магнита, обозначенного на рисунке пунктиром.
|
|
| Рис. 4. Изменение чередования фаз питающего напряжения для изменения направления вращения асинхронного двигателя. |
В некоторый момент времени t2 величина iВ достигнет своего наибольшего положительного значения, при этом токи iА , iС отрицательны. Такой пример рассмотрен на втором сверху рисунке (рис. 3,б). Как видно, в рассматриваемом случае две образовавшиеся зоны токов противоположного направления создают таксе же поле, как и в момент времени t1, однако, повернутое на 1/3 окружности, т. е. на 120° по часовой стрелке.
Далее сравним распределение магнитного поля на оставшихся двух примерах рис. 3,б, соответствующих моментам времени t3 и t4, с рассмотренными выше случаями для моментов времени t1 и t2. При сравнении видно, что за период изменения тока Т создаваемое этим трехфазным током магнитное поле поворачивается на целый оборот, т. е. на 360°. Такое магнитное поле называется вращающимся.
Если изменить чередование каких-либо двух фаз (рис. 4), например подключить обмотки b к фазе С и наоборот, т. е. вместо соединения по схеме на рис. 4,а выполнить его по схеме на рис. 4,б, то произойдет изменение направления вращения магнитного поля на противоположное. Это свойство обычно используется при необходимости изменения вращения асинхронного электродвигателя, т. е. при осуществлении так называемого реверса двигателя.
Как видно из простейшего примера, аналогичное магнитное поле могло быть получено с помощью электромагнита, имеющего одну пару полюсов (северный N и южный S). В дальнейшем понятием число пар полюсов мы будем часто пользоваться. В асинхронном электродвигателе имеются две основные части: вращающийся ротор и неподвижный статор. В наиболее широко распространенных трехфазных асинхронных электродвигателях статор подключается к трехфазной сети переменного тока. Трехфазный ток обмоток статора создает вращающееся магнитное поле с магнитным потоком Ф. Поле, вращаясь вокруг ротора и пересекая его обмотки, наводит в них электродвижущие силы (э. д. с), под действием которых в обмотках ротора проходит ток I2 (в дальнейшем индекс 1 будет соответствовать параметрам статора и индекс 2— ротора).
При взаимодействии тока ротора с вращающимся магнитным полем статора возникает сила, которая заставляет ротор двигаться в сторону вращения магнитного поля. Этой силе соответствует вращающийся электромагнитный момент М (Н∙м), величина которого пропорциональна магнитному потоку Ф (Вб) поля статора и току ротора I2 (А), т. е.
(2)
М = ФI2 .
Необходимо отметить, что вращающееся поле может быть двухполюсным, четырехполюсным, шестиполюсным и т. д. Число пар полюсов вращающегося поля определяется устройством создающей его обмотки статора. При одной и той же частоте питающего тока (промышленная частота 50 периодов в секунду) многополюсное магнитное поле будет вращаться медленнее двухполюсного в число раз, равное числу пар полюсов.
В асинхронном двигателе частота вращения ротора, увлекаемого магнитным полем статора, меньше частоты вращения самого поля. В самом деле, в случае равенства этих частот прекратилось бы движение поля по отношению к ротору, так как в роторе перестала бы наводиться электродвижущая сила, создающая токи в его обмотках. При этом прекратилось бы взаимодействие ротора с вращающимся полем и устранилась бы причина вращения ротора. В таком случае ротор стал бы неминуемо проскальзывать, т. е. частота его вращения стала бы меньше, чем частота вращения магнитного поля, что и соответствует действительному положению в асинхронном двигателе. Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.
При изучении явлений, протекающих в роторе асинхронного двигателя, когда он заторможен (т. е. при неподвижном роторе), можно заключить, что машина в этом режиме по своей физической природе представляет собой трансформатор. Первичной обмоткой трансформатора служит статор, а вторичной — обмотка ротора. В общем случае асинхронный двигатель отличен от трансформатора главным образом своим конструктивным исполнением. У асинхронной машины вторичная обмотка отделена от первичной воздушным зазором, чего нет в общепромышленных трансформаторах. Кроме того, вторичная обмотка двигателя вращается по отношению к первичной. Как было отмечено выше, частота вращения п, с которой вращается ротор, должна отличаться от частоты вращения магнитного поля п1. В зависимости от соотношения этих частот существуют три режима работы асинхронной машины: двигательный, генераторный, тормозной.
При работе асинхронной машины в двигательном режиме частота вращения ротора изменяется в пределах 0<п<п1. Вращение ротора осуществляется под воздействием электромагнитного вращающего момента и его направление совпадает с направлением вращения поля статора. Этот режим является основным при работе машины. Подводимая к статору электрическая энергия преобразуется в данном режиме в механическую.
Если с помощью какой-либо другой установки, т. е. другого первичного двигателя, установленного на валу асинхронной машины, обеспечить частоту вращения ротора выше частоты вращения магнитного поля статора (n>п1), то асинхронная машина перейдет в генераторный режим. При этом направление вращения поля статора относительно ротора изменится на обратное по сравнению с работой машины в двигательном режиме. Электромагнитный момент на валу, развиваемый асинхронной машиной, становится тормозящим по отношению к двигателю, который приводит ее во вращение. Механическая энергия, передаваемая этим двигателем асинхронной машине, преобразуется в электрическую и отдается в сеть, к которой подключен ее статор. Примером может служить работа электровоза при спуске железнодорожного состава под уклон.
Режим работы асинхронной машины, когда ротор приводится во вращение против направления вращения электромагнитного поля статора, получил название режима электромагнитного тормоза. Этот режим нашел применение в ряде подъемнотранспортных устройств. Однако генераторный режим и режим электромагнитного тормоза редко используются в асинхронных машинах и в данной книге подробно не рассматриваются.
studfiles.net
Вращающееся магнитное поле. Обычно под вращающимся магнитным полем понимается магнитное поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается с постоянной угловой скоростью. Впрочем, вращающимися называют и магнитные поля магнитов, вращающихся относительно оси, не совпадающей с их осью симметрии (например, магнитные поля звезд или планет).
Векторная сумма (не изображенный вектор, соединяющий начало первого из складываемых векторов и конец третьего) трех магнитных полей, создаваемых тремя катушками статора (синие стрелки) есть вращающееся магнитное поле - вращающийся вектор постоянной длины.Ротор на картинке представляет собой постоянный электромагнит, вращающийся вслед за вращающимся магнитным полем, создаваемым статором
Вращающееся магнитное поле создают, накладывая два или более разнонаправленных переменных, зависящих от времени по синусоидальному закону, магнитных поля одинаковой частоты, но сдвинутых друг относительно друга по фазе.
Разность фаз для двухфазных систем (два перпендикулярных электромагнита) должна составлять 90°, а для 3-фазных (три электромагнита, направленных в одной плоскости под углом 120° друг к другу) 120°.
Назначение. Асинхронные машины — наиболее распространенные электрические машины. Особенно широко они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую. В настоящее время асинхронные электродвигатели потребляют около половины всей вырабатываемой в мире электроэнергии и находят широкое применение в качестве электропривода подавляющего большинства механизмов. Это объясняется простотой конструкции, надежностью и высоким значением КПД этих электрических машин.
Открытие асинхронных машин относится к 80-м годам прошлого столетия. Их создание связывают с именами итальянского ученого Г. Феррариса, югославского ученого Н. Тесла и русского ученого М. О. Доливо-Добровольского. Г. Феррарис и Т. Тесла независимо друг от друга в 1888 г. предложили способ получения двухфазного вращающегося поля и создали первые асинхронные машины. Однако эти двигатели не получили широкого применения.
Большую роль в создании асинхронных Двигателей сыграл М. О. Доливо-Доброволъский. В 1889 г. он впервые использовал трехфазный ток для получения вращающегося магнитного поля, применил на статоре распределенную трехфазную обмотку и обмотку ротора в виде беличьей клетки. Он также предложил трехфазную обмотку ротора, выведенную на контактные кольца, и использовал для пуска двигателя реостат, подключаемый к обмотке ротора через контактные кольца.
Почти за 100 лет существования асинхронных двигателей в них совершенствовались применяемые материалы, конструкция отдельных узлов и деталей, технология их изготовления; однако принципиальные конструкторские рещения, предложенные М. О. Доливо-Добровольским, в основном остались неизменными. В дальнейшем большое применение получили также и однофазные асинхронные двигатели в основном для электробытовых приборов. Появилось также большое количество разновидностей и модификаций асинхронных машин, в частности асинхронные исполнительные двигатели, тахогенераторы, сельсины, поворотные трансформаторы и др.
Большой вклад в теорию асинхронных машин внесли советские ученые Б. П. Апаров, М. П. Костенко, Г. Н. Петров, К. И. Шенфер и др. В СССР впервые в мировой практике с 1946 г. асинхронные двигатели выпускаются едиными всесоюзными сериями. На базе единых серий в нашей стране организовано высокомеханизированное и автоматизированное крупносерийное производство на основе широкой специализации и кооперации. Большие преимущества имеют единые серии и в эксплуатации — они значительно облегчают выбор, установку, обслуживание и ремонт электрооборудования. В 70-х годах была разработана и внедрена единая серия асинхронных двигателей 4А. Одновременно с конструкцией двигателей разрабатывались электротехническая сталь, провода, изоляция и технология. В 80-х годах организацией социалистических стран «Интерэлектро» разработана новая унифицированная серия асинхронных двигателей АИ, предназначенная для использования во всех странах - членах СЭВ. Машины серии АИ, которые производятся во всех этих странах, отличаются повышенными надежностью и перегрузочной способностью, расширенным диапазоном регулирования, лучшими массово-габаритными и энергетическими показателями, а также улучшенными виброакустическими характеристиками по сравнению с машинами серии 4А. В СССР впервые в мире разработана методика оптимизированного расчета асинхронных двигателей, учитывающая затраты как на производство, так и на эксплуатацию электродвигателей; расчет с помощью электронно-вычислительных машин ведется по минимуму суммарных затрат в народном хозяйстве. В теорию и практику создания единых серий асинхронных двигателей большой вклад внесли советские ученые и инженеры А. Г. Иосифьян, Б. И. Кузнецов, Э. Д. Кравчик, В. И. Радин, Т. Г. Сорокер, И. Н. Чарахчьян и др.
Принцип действия. В асинхронной машине одну из обмоток размещают на статоре 1 (рис. 4.1, а), а вторую - на роторе 3. Между ротором и статором имеется воздушный зазор, который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка статора 2 представляет собой трехфазную (или в общем случае многофазную) обмотку, катушки которой размещают равномерно по окружности статора. Фазы обмотки статора АХ, BY и CZ соединяют по схеме Υ или Δ и подключают к сети трехфазного тока (рис. 4.1,6). Обмотку ротора 4 выполняют трехфазной или многофазной и размещают равномерно вдоль окружности ротора. Фазы ее в простейшем случае замыкают накоротко.
|
| Рис. 4.1. Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе в двигательном режиме |
При питании обмотки статора трехфазным током создается вращающееся магнитное поле, частота вращения которого (синхронная)
n1 = 60f1 /p.
Если ротор неподвижен или частота его вращения меньше синхронной, то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС. На рис. 4.1, а показано, согласно правилу правой руки, направление ЭДС, индуцированной в проводниках ротора при вращении магнитного потока Ф по часовой стрелке, при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки. Активная составляющая тока ротора совпадает по фазе с индуцированной ЭДС; поэтому условные обозначения (крестики и точки) на рис. 4.1 показывают одновременно и направление активной составляющей тока.
На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усилие Fрез, приложенное ко всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения п2 соответствует равенству электромагнитного момента тормозному, создаваемому приводимым во вращение механизмом и внутренними силами трения. Такой режим работы асинхронной машины является двигательными, очевидно, в данном случае 0 ≤ п2 < п1.
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
(4.1)
s = (п1 - п2)/п1.
Скольжение часто выражают в процентах
(4.1a)
s = [(п1 - п2 )/п1 ] • 100.
Очевидно, что при двигательном режиме 1 > s > 0.
Если ротор асинхронной машины разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля п1 то изменится направление ЭДС в проводниках ротора и активной составляющей тока ротора, т. е. асинхронная машина перейдет в генераторный режим (рис. 4.2, а). При этом изменит свое направление и электромагнитный момент М, который станет тормозящим. В генераторном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращает ее в электрическую и отдает в сеть, при этом s < 0.
Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях (рис. 4.2,6), то ЭДС и активная составляющая тока в проводниках ротора будут направлены так же, как в двигательном режиме, т. е. машина будет получать из сети активную мощность. Однако в данном
|
| Рис. 4.2. Электромагнитная схема асинхронной машины, направления токов и электромагнитного момента при работе ее в режимах: |
режиме электромагнитный момент М направлен против вращения ротора, т. е. является тормозящим. Этот режим работы асинхронной машины называют режимом электромагнитного торможения. Так как ротор вращается в обратном направлении (относительно направления магнитного поля), то n2 < 0, a s > 1.
Таким образом, характерной особенностью асинхронной машины является наличие скольжения, т. е. неравенство частот вращения n1 и п2. Только при указанном условии в проводниках обмотки ротора индуцируется ЭДС и возникает электромагнитный момент. Поэтому машину называют асинхронной (ее ротор вращается несинхронно с полем).
На практике обычно встречается двигательный режим асинхронной машины, поэтому теория асинхронных машин изложена здесь применительно к этому режиму с последующим обобщением ее на другие режимы работы.
studfiles.net
Переменный ток, рассмотренный ранее, называется однофазным. Трехфазным называется ток, представляющий собой совокупность трех однофазных токов, сдвинутых друг относительно друга по фазе.
Если амплитуды ЭДС равны, а сдвиг фаз между двумя любыми смежными ЭДС равен  , то трехфазная система называется симметричной. В этом случае на обмотках возникают
, то трехфазная система называется симметричной. В этом случае на обмотках возникают
одинаковые по величине, но сдвинутые по фазе напряжения:  ,
, ,
, .
.
Использование несвязанных между собой обмоток эквивалентно трем отдельным генераторам и требует для передачи электроэнергии потребителю три пары проводов.
Соединение обмоток между собой позволяет уменьшить количество проводов при передаче энергии и поэтому широко используется в технике.
При соединении обмоток звездой (рис.166) они имеют одну общую точку. Напряжение на каждой обмотке называется фазным. Проводник, соединенный с точкой общего потенциала, называется нулевым проводом. Проводники, соединенные со свободными концами обмоток, называются фазными проводами.
Фазные напряжения, в этом случае, это напряжения между фазными проводами и нулевым проводом. Напряжение между фазными проводами называется линейным. Ток, текущий через обмотки, называется фазным током, а ток текущий в линии, - током линии.
Из векторной диаграммы, при соединении звездой, следует, что  . Кроме того при этом фазные токи равны токам в линии.
. Кроме того при этом фазные токи равны токам в линии.





РИС.166 РИС.167 РИС.168 РИС.169 РИС.170
Если каждую обмотку замкнуть на одинаковую нагрузку R, то суммарная сила тока по нулевому проводу  , так как из векторной диаграммы
, так как из векторной диаграммы .
.
Соединение обмоток генератора звездой позволяет использовать при передаче энергии четыре провода вместо шести.
При соединении обмоток треугольником (рис.168) они образуют замкнутый контур с весьма малым сопротивлением. Линейный провод отходит от общих точек начала одной фазы и конца другой и, поэтому фазные напряжения равны линейным (рис.169).
Из векторной диаграммы токов (рис.170) следует, что
 ,
, 
На практике используется не только соединение обмоток генератора, но и соединение между собой нагрузок звездой или треугольником. Таких комбинаций возможного соединения генератора и нагрузок – четыре.




РИС.171 РИС.172 РИС.173 РИС.174
При соединении звезда – звезда (рис.171) на всех нагрузках разное напряжение, но если сопротивление нагрузок приблизительно равно, то ток по нулевому проводу практически равен нулю.
Тем не менее, нулевой провод нельзя убирать или ставить в него предохранители потому, что без него на каждую из пар нагрузок действует линейное напряжение, причем оно распределяется в соответствии с сопротивлением нагрузок. Получается, что напряжение, подаваемое на нагрузку, зависит от ее сопротивления, что неэффективно и опасно.
Если генератор и нагрузки соединены звезда – треугольник (рис.172), то на каждой нагрузке, независимо от ее сопротивления, одинаковое напряжение, равное линейному.
При соединении треугольник – треугольник (рис.173) на всех нагрузках фазное напряжение, независимо от их сопротивления.
Если генератор и нагрузки соединены треугольник – звезда (рис.174), то на каждой нагрузке напряжение равно  .
.
Трехфазный ток используется для получения вращающегося магнитного поля. В этом случае трехфазный ток подводится к трем обмоткам, расположенным на неподвижной станине – статоре. Внутри статора помещен стальной барабан – ротор, вдоль образующих которого в пазах уложены провода, соединенные между собой на обоих торцах кольцами.
Обмотки статора создают магнитный поток одинаковой величины, но сдвинутый по фазе, т.е. он как бы вращается относительно ротора. В обмотках ротора возникают индукционные потоки, которые, в свою очередь, взаимодействуют с вращающимся магнитным потоком, что приводит ротор во вращение, т.е. получается электродвигатель достаточно простого устройства.
При увеличении скорости ротора уменьшается относительная скорость движения его проводников относительно магнитного поля. Если бы он достиг той же скорости вращения, что и магнитный поток статора, то индукционный ток равнялся бы нулю и, соответственно, вращающий момент стал бы равным нулю.
Следовательно, при наличии тормозного момента магнитный поток и ротор не могут вращаться с той же скоростью, что и поток статора (синхронно), - скорость вращения ротора всегда несколько меньше. Поэтому двигатели такого типа называются асихронными (несинхронными).
studfiles.net
Принцип получения вращающегося магнитного поля.В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора.
Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле.
Вращающееся поле переменного тока трехфазной цепи.Рассмотрим получение вращающегося поля на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° (рис.3.5) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов на 120°.
Если для обмотки АХпринять начальную фазу тока равной нулю, тогда мгновенные значения токов имеют вид



Графики токов представлены на рис. 3.6. Примем, что в каждой обмотке всего два провода, занимающие два диаметрально расположенные паза.

Рис. 3.5 Рис. 3.6
Как видно из рис. 3.6, в момент времени toток в фазеАположительный, а в фазахВиС– отрицательный.
Если ток положительный, то направление тока примем от начала к концу обмотки, что соответствует обозначению знаком «х» в начале обмотки и знаком «·» (точка) в конце обмотки. Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля для момента времени to(рис. 3.7, а). Ось результирующего магнитного поля с индукциейВтрезрасположена горизонтально.

Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой

где Вт – максимальная индукция одной фазы; Вmрез – максимальная индукция трех фаз;  – угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
– угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
В электромеханическом преобразовании энергии в АД участвуют трехфазная обмотка 1, расположенная на неподвижном статоре 2 и создающая круговое вращающееся магнитное поле, и обмотка 3 вращающегося ротора 4, вал 5 которого соединен с исполнительным механизмом. Между статором и ротором предусматривается воздушный зазор 6.

Рис. 1 — Принцип действия асинхронного двигателя
При вращении магнитного поля со скоростью:

линии магнитной индукции:

пересекают проводники обмотки ротора и в них индуктируется ЭДС Е2 и протекает ток . Направление ЭДС определяется по правилу «правой руки», а ее величина равна:

где L – активная длина проводника обмотки ротора;
ν1 - линейная скорость движения магнитного поля статора:

D – диаметр расточки статора.
Направление тока I2 совпадает с направлением ЭДС Е2пр. В результате взаимодействия проводников с током и магнитного поля на каждый проводник действует электромагнитная сила:

направление, которой определяется по правилу «левой руки».
Совокупность этих сил создает на роторе результирующую силу Fрез и электромагнитный момент Мэм, приводящий ротор во вращение со скоростью n2 в ту же сторону, что и вращение поля статора. Вращение ротора через вал передается исполнительному механизму. Таким образом, электрическая энергия, поступающая в обмотку статора из сети, преобразуется в механическую энергию. С началом движения ротора ЭДС в проводниках ротора определяются разностью скоростей ν1 и ν2

где ν2

Это линейная скорость движения проводника ротора.
Чем выше скорость вращения ротора n2, тем меньшая ЭДС в нем индуктируется, тем меньше ток Ι2, тем меньше сила fпр и Fрез. При достижении ротором скорости вращения n2 = n1, E2 = 0, действие электромагнитных сил прекращается и вращение ротора замедляется под действием сил трения (на холостом ходу) или под действием момента сопротивления исполнительного механизма (при работе под нагрузкой). Но когда n2 станет меньше n1, опять начнет действовать электромагнитная сила.
Следовательно, в рассматриваемой системе возможно только асинхронное (несинхронное) вращение ротора относительно вращающегося магнитного поля статора.
Электромагнитный момент Мэм уравновешивается моментом сопротивления Мс исполнительного механизма. Чем больше Мс, тем больше должен быть вращающий момент Мэм, который может возрасти в первую очередь за счет тока в проводниках ротора. Ток при постоянстве сопротивления проводника пропорционален ЭДС, которая зависит от скорости пересечения проводников ротора вращающимся магнитным полем.
Следовательно, чем больше момент сопротивления, тем меньше скорость вращения ротора и наоборот.
Отношение:

При неподвижном роторе (n2 = 0) скольжение равно 1,0. Это для АД режим короткого замыкания. При холостом ходе, когда скорость ротора максимально приближается к синхронной (n2 = n1) скольжение минимально и очень близко к нулю. Скольжение, соответствующее номинальной нагрузке АД, называется номинальным скольжением Sн и составляет единицы процента, в зависимости от типа и назначения двигателя.
С учетом отношения, скорость вращения ротора может быть выражена через n1 и скольжение s:

В рабочем режиме АД вращающееся магнитное поле статора пересекает обмотку ротора со скоростью:

Частота ЭДС и токов, наводимых этим полем в обмотке ротора, равна:

Таким образом, частота ЭДС и токов в роторе зависит от сколь- жения. Так, при S=1 (при пуске) f2 = f1, при номинальном режиме нагрузки Sн = (0,02…0,04), f2= 1…2Гц.
Протекающие в обмотке ротора токи создают МДС и магнитное поле ротора, которые вращаются относительно ротора со скоростью:

С учетом:

cкорость вращения этого поля относительно неподвижного статора составляет:

т.е. магнитное поле ротора вращается в расточке статора с той же скоростью и в ту же сторону, что и поле статора. Стало быть, они неподвижны друг относительно друга, образуют единое магнитное поле, созданное совместным действием МДС статора и ротора.
Таким образом, вектор:

на рис.1 необходимо рассматривать как вектор результирующего магнитного поля.
Условие неподвижности друг относительно друга магнитных полей статора и ротора означает, что число пар полюсов обмоток статора и ротора должно быть обязательно одинаково, p1 = p2 = p. В короткозамкнутом роторе это действие выполняется автоматически, в двигателе с фазным ротором оно должно быть обеспечено при проектировании. В то же время соотношение между числом фаз обмоток статора и ротора может быть произвольным.
Асинхронная машина обратима, т.е. может работать как в двигательном, так и в генераторном режимах. Если ротор с помощью постороннего двигателя разогнать до скорости вращения n2 >n1, то изменится направление ЭДС и тока в проводниках ротора, изменит свое направление и электромагнитный момент, который станет тормозящим. Асинхронная машина механическую энергию, получаемую от приводного двигателя, преобразует в электрическую и отдает в сеть, т.е. переходит в генераторный режим.
В процессе эксплуатации асинхронного двигателя возможен режим работы при S >1,0, когда ротор вращается в сторону, противоположную направлению вращения поля статора. В этом режиме, называемом режимом электромагнитного торможения (или режимом противовключения ), ЭДС и ток в роторе направлены также как в двигательном режиме, однако электромагнитный момент направлен против движения ротора, т.е. является тормозящим. В машине происходит преобразование как электрической энергии, поступающей из сети, так и механической энергии, передаваемой с вала.
studfiles.net
Основой действия асинхронного двигателя является вращающееся магнитное поле. Принцип получения вращающегося магнитного поля заключается в том, что если по системе проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле.
Рассмотрим получение вращающегося поля в трехфазном двигателе. На рис. 11.3 показаны три фазные обмотки A – X, B – Y, C – Z, каждая в виде одного витка. От источника питания к обмоткам подводится трехфазная система токов
 ;
; ;
; . (11.1)
. (11.1)
Положительные направления токов приняты от начала обмотки к концу, а соответствующие им пульсирующие магнитные потоки образуют трехфазную звезду  .
.
Рассмотрим результирующий магнитный поток для нескольких моментов времени.
В начальный момент времени при  = 0
= 0


а) б)
Рис. 11.3
Им соответствуют магнитные потоки
 ;
;  ;
; ,
,
где  – максимальное значение потока фазы.
– максимальное значение потока фазы.
Результирующий магнитный поток в 1,5 раза больше фазного и направлен по вертикали вниз (рис. 11.4 а).
В момент времени  токи в обмотках
токи в обмотках
 .
.
Этим токам соответствуют магнитные потоки
 ;
; .
.
На рис. 11.4 б показаны векторы результирующего магнитного потока и его составляющие. Направление потока отличается от предыдущего на 90°, а его значение не изменилось
 .
.
В момент времени  , соответствующий
, соответствующий , токи в обмотках:
, токи в обмотках:

Этим токам соответствуют магнитные потоки
 .
.
На рис. 11.4 в показаны результирующий магнитный поток и его составляющие. По сравнению с начальным моментом времени результирующий магнитный поток изменил направление на 180°, а его значение осталось неизменным и равным
 .
. ;
; .
.

Таким образом, трехфазная обмотка, питаемая сдвинутыми на 120° токами, создает вращающееся магнитное поле. Результирующий поток остается неизменным и равным 1,5 от максимального потока фазы. Направление этого потока всегда совпадает с направлением магнитного потока той фазы, ток в которой в данный момент максимален. Поэтому для изменения направления вращения необходимо поменять местами любые две фазы.
Рассмотренные примеры относятся к двухполюсному исполнению обмотки ( ) при частоте вращения поля
) при частоте вращения поля . В общем случае частота вращения поля
. В общем случае частота вращения поля
 , (11.2)
, (11.2)
где  – число пар полюсов машины;
– число пар полюсов машины; – частота тока статора.
– частота тока статора.
Трехфазная обмотка статора создает магнитное поле, вращающееся со скоростью
 .
.
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Отношение
 (11.3)
(11.3)

Рис. 11.5
или
 (11.4)
(11.4)
называется скольжением асинхронной машины.
В зависимости от соотношения  и
и различают три режима работы: в режиме двигателя; в режиме генератора; в режиме электромагнитного тормоза.
различают три режима работы: в режиме двигателя; в режиме генератора; в режиме электромагнитного тормоза.
Работа в режиме двигателя. На рис. 11.5 показано магнитное поле статора, вращающееся по часовой стрелке. При  линии поля статора перемещаются относительно ротора также по часовой стрелке со скоростью
линии поля статора перемещаются относительно ротора также по часовой стрелке со скоростью . Согласно правилу правой руки ЭДС в проводниках ротора под северным полюсом направлены к нам, в проводниках под южным полюсом – от нас. То же направление имеют и активные составляющие токов в проводниках. Электромагнитные силы взаимодействия магнитных полей статора и ротора создают вращающий момент в направлении вращения поля статора. Скорость
. Согласно правилу правой руки ЭДС в проводниках ротора под северным полюсом направлены к нам, в проводниках под южным полюсом – от нас. То же направление имеют и активные составляющие токов в проводниках. Электромагнитные силы взаимодействия магнитных полей статора и ротора создают вращающий момент в направлении вращения поля статора. Скорость , с которой вращается двигатель, зависит от его нагрузки. При холостом ходе скорость
, с которой вращается двигатель, зависит от его нагрузки. При холостом ходе скорость становится почти равной
становится почти равной , так как при
, так как при = 0 ЭДС и токи в роторе равны нулю и электромагнитное взаимодействие исчезает. Таким образом, асинхронная машина работает в режиме двигателя в пределах от
= 0 ЭДС и токи в роторе равны нулю и электромагнитное взаимодействие исчезает. Таким образом, асинхронная машина работает в режиме двигателя в пределах от = 0 до
= 0 до , т.е. при скольжении от
, т.е. при скольжении от +1 до
+1 до 0. При этом электрическая энергия, подводимая к статору из сети, преобразовывается в механическую энергию на валу.
0. При этом электрическая энергия, подводимая к статору из сети, преобразовывается в механическую энергию на валу.
Работа в режиме генератора. Предположим, что подключенный к сети статор создает вращающееся магнитное поле, а ротор приводится во вращение в том же направлении со скоростью  . В этом случае скольжение будет отрицательным, а ЭДС и токи ротора изменяют направление по сравнению с работой в режиме двигателя. Момент на валу становится тормозящим по отношению к вращающему моменту первичного двигателя. Асинхронная машина работает генератором. Механическая энергия, подведенная к валу, преобразовывается в электрическую энергию и отдается в сеть. Таким образом, асинхронная машина может работать в режиме генератора параллельно с сетью в пределах от
. В этом случае скольжение будет отрицательным, а ЭДС и токи ротора изменяют направление по сравнению с работой в режиме двигателя. Момент на валу становится тормозящим по отношению к вращающему моменту первичного двигателя. Асинхронная машина работает генератором. Механическая энергия, подведенная к валу, преобразовывается в электрическую энергию и отдается в сеть. Таким образом, асинхронная машина может работать в режиме генератора параллельно с сетью в пределах от до
до , т.е. при скольжении от
, т.е. при скольжении от до
до .
.
Работа в режиме электромагнитного тормоза. Допустим, что ротор приводится во вращение против направления вращения магнитного потока статора. В этом случае к асинхронной машине подводится энергия с двух сторон – электрическая из сети и механическая от первичного двигателя. Такой режим работы называется режимом электромагнитного тормоза. Он возникает при скольжении от  до
до . Примером практического применения режима электромагнитного тормоза является опускание груза в подъемно-транспортных устройствах.
. Примером практического применения режима электромагнитного тормоза является опускание груза в подъемно-транспортных устройствах.
studfiles.net
Как было показано ранее, одним из важнейших преимуществ многофазных систем является получение вращающегося магнитного поля с помощью неподвижных катушек, на чем основана работа двигателей переменного тока. Рассмотрение этого вопроса начнем с анализа магнитного поля катушки с синусоидальным током.
Магнитное поле катушки с синусоидальным током
При пропускании по обмотке катушки синусоидального тока она создает м агнитное поле, вектор индукции которого изменяется (пульсирует) вдоль этой катушки также по синусоидальному закону Мгновенная ориентация вектора магнитной индукции в пространстве зависит от намотки катушки и мгновенного направления тока в ней и определяется по правилу правого буравчика. Так для случая, показанного на рис. 1, вектор магнитной индукции направлен по оси катушки вверх. Через полпериода, когда при том же модуле ток изменит свой знак на противоположный, вектор магнитной индукции при той же абсолютной величине поменяет свою ориентацию в пространстве на 1800. С учетом вышесказанного магнитное поле катушки с синусоидальным током называютпульсирующим.
агнитное поле, вектор индукции которого изменяется (пульсирует) вдоль этой катушки также по синусоидальному закону Мгновенная ориентация вектора магнитной индукции в пространстве зависит от намотки катушки и мгновенного направления тока в ней и определяется по правилу правого буравчика. Так для случая, показанного на рис. 1, вектор магнитной индукции направлен по оси катушки вверх. Через полпериода, когда при том же модуле ток изменит свой знак на противоположный, вектор магнитной индукции при той же абсолютной величине поменяет свою ориентацию в пространстве на 1800. С учетом вышесказанного магнитное поле катушки с синусоидальным током называютпульсирующим.
Круговое вращающееся магнитное поле двух- и трехфазной обмоток
Круговым вращающимся магнитным полем называется поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается в пространстве с постоянной угловой частотой.
Для создания кругового вращающегося поля необходимо выполнение двух условий:
Оси катушек должны быть сдвинуты в пространстве друг относительно друга на определенный угол (для двухфазной системы – на 900, для трехфазной – на 1200).
Токи, питающие катушки, должны быть сдвинуты по фазе соответственно пространственному смещению катушек.
Рассмотрим получение кругового вращающегося магнитного поля в случае двухфазной системы Тесла (рис. 2,а).
При пропускании через катушки гармонических токов каждая из них в соответствии с вышесказанным будет создавать пульсирующее магнитное поле. Векторы  и
и , характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900 (см. рис. 2,б), то
, характеризующие эти поля, направлены вдоль осей соответствующих катушек, а их амплитуды изменяются также по гармоническому закону. Если ток в катушке В отстает от тока в катушке А на 900 (см. рис. 2,б), то  .
.
Найдем проекции результирующего вектора магнитной индукции  на оси x и y декартовой системы координат, связанной с осями катушек:
на оси x и y декартовой системы координат, связанной с осями катушек:


Модуль результирующего вектора магнитной индукции в соответствии с рис. 2,в равен
|
| (1) |
при этом для тангенса угла a , образованного этим вектором с осью абсцисс, можно записать
 ,
,
откуда
|
| (2) |
Полученные соотношения (1) и (2) показывают, что вектор результирующего магнитного поля неизменен по модулю и вращается в пространстве с постоянной угловой частотой  , описывая окружность, что соответствует круговому вращающемуся полю.
, описывая окружность, что соответствует круговому вращающемуся полю.
Покажем, что симметричная трехфазная система катушек (см. рис. 3,а) также позволяет получить круговое вращающееся магнитное поле.
Каждая из катушек А, В и С при пропускании по ним гармонических токов создает пульсирующее магнитное поле. Векторная диаграмма в пространстве для этих полей представлена на рис. 3,б. Для проекций результирующего вектора магнитной индукции на

оси декартовой системы координат, ось y у которой совмещена с магнитной осью фазы А, можно записать
|
| (3) |
|
| (4) |
Приведенные соотношения учитывают пространственное расположение катушек, но они также питаются трехфазной системой токов с временным сдвигом по фазе на 1200. Поэтому для мгновенных значений индукций катушек имеют место соотношения
 ;
;  ;
; .
.
Подставив эти выражения в (3) и (4), получим:
|
| (5) |
| | (6) |
В соответствии с (5) и (6) и рис. 2,в для модуля вектора магнитной индукции результирующего поля трех катушек с током можно записать:
 ,
,
а сам вектор  составляет с осью х угол a, для которого
составляет с осью х угол a, для которого
 ,
,
откуда
 .
.
Таким образом, и в данном случае имеет место неизменный по модулю вектор магнитной индукции, вращающийся в пространстве с постоянной угловой частотой  , что соответствует круговому полю.
, что соответствует круговому полю.
Магнитное поле в электрической машине
С целью усиления и концентрации магнитного поля в электрической машине для него создается магнитная цепь. Электрическая машина состоит из двух основных частей (см. рис. 4): неподвижного статора и вращающегося ротора, выполненных соответственно в виде полого и сплошного цилиндров.
На статоре расположены три одинаковые обмотки, магнитные оси которых сдвинуты по расточке магнитопровода на 2/3 полюсного деления  , величина которого определяется выражением
, величина которого определяется выражением

 ,
,
где  - радиус расточки магнитопровода, а р – число пар полюсов (число эквивалентных вращающихся постоянных магнитов, создающих магнитное поле, - в представленном на рис. 4 случае р=1).
- радиус расточки магнитопровода, а р – число пар полюсов (число эквивалентных вращающихся постоянных магнитов, создающих магнитное поле, - в представленном на рис. 4 случае р=1).
На рис. 4 сплошными линиями (А, В и С) отмечены положительные направления пульсирующих магнитных полей вдоль осей обмоток А, В и С.
Приняв магнитную проницаемость стали бесконечно большой, построим кривую распределения магнитной индукции в воздушном зазоре машины, создаваемой обмоткой фазы А, для некоторого момента времени t (рис. 5). При построении учтем, что кривая изменяется скачком в местах расположения катушечных сторон, а на участках, лишенных тока, имеют место горизонтальные участки.
З аменим данную кривую синусоидой (следует указать, что у реальных машин за счет соответствующего исполнения фазных обмоток для результирующего поля такая замена связана с весьма малыми погрешностями). Приняв амплитуду этой синусоиды для выбранного момента времени t равной ВА, запишем
аменим данную кривую синусоидой (следует указать, что у реальных машин за счет соответствующего исполнения фазных обмоток для результирующего поля такая замена связана с весьма малыми погрешностями). Приняв амплитуду этой синусоиды для выбранного момента времени t равной ВА, запишем
|
| (7) |
и аналогично
|
| (8) |
|
| (9) |
С учетом гармонически изменяющихся фазных токов для мгновенных значений этих величин при сделанном ранее допущении о линейности зависимости индукции от тока можно записать
 .
.
Подставив последние соотношения в (7)…(9), получим
|
| (10) |
|
| (11) |
|
| (12) |
Просуммировав соотношения (10)…(12), с учетом того, что сумма последних членов в их правых частях тождественно равна нулю, получим для результирующего поля вдоль воздушного зазора машины выражение
 ,
,
представляющее собой уравнение бегущей волны.
Магнитная индукция  постоянна, если
постоянна, если . Таким образом, если мысленно выбрать в воздушном зазоре некоторую точку и перемещать ее вдоль расточки магнитопровода со скоростью
. Таким образом, если мысленно выбрать в воздушном зазоре некоторую точку и перемещать ее вдоль расточки магнитопровода со скоростью
 ,
,
то магнитная индукция для этой точки будет оставаться неизменной. Это означает, что с течением времени кривая распределения магнитной индукции, не меняя своей формы, перемещается вдоль окружности статора. Следовательно, результирующее магнитное поле вращается с постоянной скоростью. Эту скорость принято определять в оборотах в минуту:
 .
.
Принцип действия асинхронного и синхронного двигателей
Устройство асинхронного двигателя соответствует изображению на рис. 4. Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора.
В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение со скоростью  , принципиально меньшей скорости вращения поля
, принципиально меньшей скорости вращения поля 0. Отсюда название двигателя - асинхронный.
0. Отсюда название двигателя - асинхронный.
Величина

называется относительным скольжением. Для двигателей нормального исполнения S=0,02…0,07. Неравенство скоростей магнитного поля и ротора становится очевидным, если учесть, что при  вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента.
вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента.
Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя – синхронный.
В заключение отметим, что в отличие от асинхронного двигателя,  у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения
у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
Литература
Основы теории цепей: Учеб. для вузов /Г.В.Зевеке, П.А.Ионкин, А.В.Нетушил, С.В.Страхов. –5-е изд., перераб. –М.: Энергоатомиздат, 1989. -528с.
Бессонов Л.А. Теоретические основы электротехники: Электрические цепи. Учеб. для студентов электротехнических, энергетических и приборостроительных специальностей вузов. –7-е изд., перераб. и доп. –М.: Высш. шк., 1978. –528с.
Теоретические основы электротехники. Учеб. для вузов. В трех т. Под общ. ред. К.М.Поливанова. Т.1. К.М.Поливанов. Линейные электрические цепи с сосредоточенными постоянными. –М.: Энергия- 1972. –240с.
Контрольные вопросы
Какое поле называется пульсирующим?
Какое поле называется вращающимся круговым?
Какие условия необходимы для создания кругового вращающегося магнитного поля?
Какой принцип действия у асинхронного двигателя с короткозамкнутым ротором?
Какой принцип действия у синхронного двигателя?
На какие синхронные скорости выпускаются в нашей стране двигатели переменного тока общепромышленного исполнения?
studfiles.net
Лекция 21
Электрические машины — это электромеханические устройства, которые преобразуют механическую энергию в электрическую или электрическую в механическую. Электрические машины, преобразующие механическую энергию в электрическую, называются электромашинными генераторами. Электромашинные генераторы, в частности трехфазные синхронные генераторы, устанавливают на всех электростанциях, входящих в энергетические системы. Они являются, таким образом, основными источниками электрической энергии.
Электрические машины, преобразующие электрическую энергию в механическую, называются электрическими двигателями. Электрические двигатели по установленной мощности являются основными потребителями электрической энергии.
Электрические машины обладают свойством обратимости, т. е. одна и та же электрическая машина может работать как в режиме генератора, так и в режиме двигателя. Электрические машины могут быть также электромагнитным тормозом или выполнять некоторые специальные функции, например в системах автоматического управления служить исполнительными двигателями, тахогенераторами, индукционными машинами синхронной связи (сельсинами).
Наибольшее распространение в промышленности получили дешевые, простые в изготовлении и обслуживании, долговечные трехфазные асинхронные двигатели. Применяются также трехфазные синхронные двигатели. Следует отметить, что асинхронные машины применяют, как правило, только в качестве двигателей. Синхронные машины применяются как в качестве двигателей, так и в качестве генераторов. Синхронные генераторы, применяемые на электростанциях, достигают мощности до 1 млн. кВт.
Основным недостатком простых в изготовлении и эксплуатации асинхронных трехфазных двигателей является трудность регулирования их частоты вращения. В тех случаях, когда необходимо по условиям работы двигателя регулировать частоту его вращения в широких пределах, применяют более сложные в изготовлении, но легко регулируемые электрические двигатели постоянного тока.
Для расширения возможностей регулирования частоты вращения электрических двигателей переменного тока их снабжают коллектором (коллекторные машины переменного тока). Универсальные коллекторные двигатели, которые могут работать как на постоянном, так и однофазном переменном токе, широко используют в устройствах автоматики и различных электрических бытовых приборах.
Для изменения числа фаз, частоты переменного тока, для преобразования постоянного напряжения в переменное или, наоборот, переменного в постоянное применяют различные электромашинные преобразователи частоты. К таким преобразователям относятся синхронные преобразователи частоты, у которых вал синхронного двигателя механически соединен с валом синхронного генератора.
Любая электрическая машина состоит из двух основных частей: статора (неподвижная часть) и ротора (вращающаяся часть). Трехфазные асинхронные и синхронные двигатели имеют на статоре три фазные обмотки, по которым проходят токи, поступающие из трехфазной сети. Эти токи, проходя по обмоткам статора, возбуждают в двигателе вращающееся магнитное поле.
На любое электропроводящее тело или магнит, помещенный в такое поле, действует вращающий момент. Это и положено в основу принципа действия электрических двигателей переменного тока, многих измерительных приборов и аппаратов регулирования и управления.
Вращающееся магнитное поле можно получить с помощью двух одинаковых катушек, питаемых переменным током, если их оси сдвинуты в пространстве относительно друг друга на угол π/2, а также с помощью трех одинаковых катушек, оси которых сдвинуты в пространстве на угол 2π/3, если питать эти катушки от симметричной трехфазной системы токов. Вектор магнитной индукции каждой катушки (фазы) всегда направлен по ее оси (рис. 12.1, а). Если через катушку пропустить переменный синусоидальный ток, то вдоль оси создается переменное магнитное поле, изменяющееся во времени по синусоидальному закону (рис. 12.1,б). В самом деле, если принять для некоторого момента времени t направление тока таким, как показано на рис. 12.1, а, то согласно правилу правоходового винта магнитный поток и магнитная индукция В будут направлены вдоль оси катушки так, как это показано на рисунке;
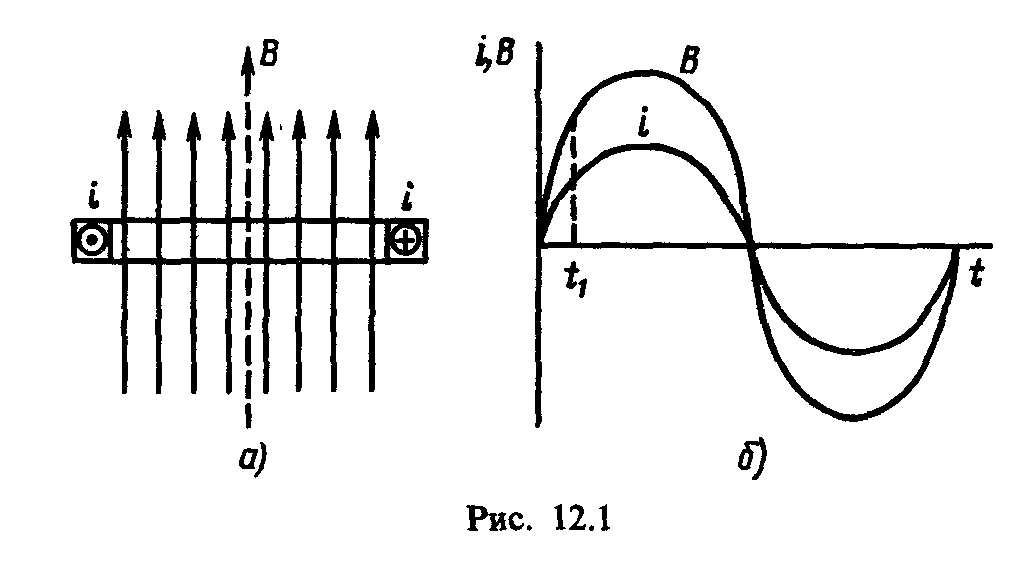
индукция В будет изменяться во времени и пространстве по синусоидальному закону В = Вm sin ωt, если цепь линейна и ток, проходящий через нее, синусоидален (рис. 12.1, б).
Если имеются две одинаковые катушки А и В (рис. 12.2, а), оси которых расположены взаимно перпендикулярно, то вдоль оси каждой катушки образуется переменное магнитное поле. Поля этих катушек накладываются друг на друга, и в активной зоне катушек (в середине устройства) образуется единое результирующее магнитное поле, характеризующееся вектором суммарной магнитной индукции В (рис. 12.2,6). Так как направления магнитных полей катушек взаимно перпендикулярны, то результирующая магнитная индукция
Если индукция магнитного поля в катушке A BA = Bmsin ωt, а в катушке В индукция  то индукция результирующего магнитного поля
то индукция результирующего магнитного поля .
.
Таким образом, индукция результирующего магнитного поля системы из двух одинаковых взаимно перпендикулярных катушек, складывающаяся из двух переменных магнитных полей, постоянна и равна Вm. Вектор индукции результирующего магнитного поля В = Вm образует с вектором ВB угол α, который можно определить из соотношения

Угол α = ωt, образуемый вектором индукции результирующего магнитного поля В с вектором ВB, непрерывно изменяется и за время одного периода Т поворачивается на угол α = ωt = 2πТ/Т= 2π, т. е. имеется вращающееся магнитное поле, получившее название двухфазного вращающегося магнитного поля.
Итак, магнитное поле, вектор магнитной индукции которого вращается в пространстве, называется вращающимся магнитным полем. Вращающееся магнитное поле, у которого вектор магнитной индукции не изменяется по величине и вращается с постоянной угловой скоростью, называется круговым. Так, двухфазное вращающееся магнитное поле является круговым.

Если система катушек образует одну пару полюсов р = 1 {один северный и один южный полюс, рис. 12.2, а), т. е. двухполюсное магнитное поле, то поле делает полный оборот за время одного периода Т, а угловая частота
 (12.1)
(12.1)
При частоте переменного тока f частота вращения поля (в оборотах в минуту)
 (12.2)
(12.2)
Из (12.2) следует, что частота вращения поля двухполюсных магнитных катушек, включаемых в промышленную сеть с частотой f = 50 Гц, n0 = 60f = 3000 об/мин.
Рассмотрим трехфазную систему. Для этого возьмем три катушки, через которые проходят три тока, и разместим их в пространстве под углом 120° относительно друг друга (рис. 12.3, а).
Если принять направление токов в сечении катушек такими, как показано на рисунке (крестик — ток направлен от наблюдателя, точка - к наблюдателю), то в соответствии с правилом правоходового винта магнитный поток и магнитная индукция каждой из катушек направлены вдоль осей (указано стрелками). Вдоль оси каждой из катушек образуется свое переменное магнитное поле. Эти поля, накладываясь, создают в активной зоне катушек единое результирующее поле, характеризующееся вектором суммарной магнитной индукции В. На рис. 12.3, б представлены графики мгновенных значений токов в фазах (катушках) трехфазной системы.
На рис. 12.3, в показаны последовательно пять моментов времени, для которых построены векторы магнитной индукции каждой фазы и вектор результирующего поля. В момент t1 ток в катушке А равен нулю

и, как следствие, магнитная индукция равна нулю, а ток в катушке С положителен и равен  Ток в катушке В равен току в катушке С, но отрицателен. Вектор результирующей магнитной индукцииВ в данном случае направлен горизонтально влево. В момент t2 ток в катушке А положителен и максимален, а токи в. двух других катушках отрицательные и одинаковые по значению, составляя каждый половину от тока. катушки А. Для момента t2, складывая векторы магнитных индукций катушек А, В, С, получим вектор результирующей магнитной индукции В, направленный вертикально вверх, т. е. вдоль вектора магнитной индукции той катушки, в которой ток максимален, в частности в направлении вектора магнитной индукции катушки А. Следовательно, за промежуток времени от t1 до t2, т. е. за четверть периода изменения тока, вектор результирующей магнитной индукции В «повернулся» на угол 90° в сторону, соответствующую чередованию фаз А, В, С (по часовой стрелке). В момент t3, как и в момент t1, магнитная индукция в катушке А равна нулю, а токи в катушках В и С одинаковы по абсолютному значению, но противоположны по знаку, причем в катушке С ток отрицателен, а в катушке В - положителен. В результате сложения векторов - Вс и +ВВ вектор результирующего магнитного поля В направлен горизонтально вправо, т. е. он за промежуток времени от t2 до t3, равный четверти периода, повернется еще на угол 90° в сторону движения часовой стрелки. В момент t4 ток в катушке А максимальный и отрицательный, а в двух других катушках токи одинаковые и положительные, равные половине значения тока катушки А. При сложении векторов магнитных индукций катушек результирующий вектор В совпадает по направлению с вектором, соответствующим катушке с максимальной магнитной индукцией (BA), т. е. направлен вертикально сверху вниз. Таким образом, результирующий вектор за промежуток времени от t3 до t4, равный четверти периода, еще повернулся на угол 90°. В момент t5 ток в катушке А равен нулю, а в двух других катушках токи равны по абсолютному значению, но противоположны по знаку, причем картина идентична моменту t1, т. е. вектор В занимает горизонтальное положение и направлен влево.
Ток в катушке В равен току в катушке С, но отрицателен. Вектор результирующей магнитной индукцииВ в данном случае направлен горизонтально влево. В момент t2 ток в катушке А положителен и максимален, а токи в. двух других катушках отрицательные и одинаковые по значению, составляя каждый половину от тока. катушки А. Для момента t2, складывая векторы магнитных индукций катушек А, В, С, получим вектор результирующей магнитной индукции В, направленный вертикально вверх, т. е. вдоль вектора магнитной индукции той катушки, в которой ток максимален, в частности в направлении вектора магнитной индукции катушки А. Следовательно, за промежуток времени от t1 до t2, т. е. за четверть периода изменения тока, вектор результирующей магнитной индукции В «повернулся» на угол 90° в сторону, соответствующую чередованию фаз А, В, С (по часовой стрелке). В момент t3, как и в момент t1, магнитная индукция в катушке А равна нулю, а токи в катушках В и С одинаковы по абсолютному значению, но противоположны по знаку, причем в катушке С ток отрицателен, а в катушке В - положителен. В результате сложения векторов - Вс и +ВВ вектор результирующего магнитного поля В направлен горизонтально вправо, т. е. он за промежуток времени от t2 до t3, равный четверти периода, повернется еще на угол 90° в сторону движения часовой стрелки. В момент t4 ток в катушке А максимальный и отрицательный, а в двух других катушках токи одинаковые и положительные, равные половине значения тока катушки А. При сложении векторов магнитных индукций катушек результирующий вектор В совпадает по направлению с вектором, соответствующим катушке с максимальной магнитной индукцией (BA), т. е. направлен вертикально сверху вниз. Таким образом, результирующий вектор за промежуток времени от t3 до t4, равный четверти периода, еще повернулся на угол 90°. В момент t5 ток в катушке А равен нулю, а в двух других катушках токи равны по абсолютному значению, но противоположны по знаку, причем картина идентична моменту t1, т. е. вектор В занимает горизонтальное положение и направлен влево.
Итак, из рассмотрения векторных диаграмм видно, что за один период синусоидального тока вектор результирующей магнитной индукции делает поворот на 360° и вращается в плоскости осей катушек в отрицательном направлении (по часовой стрелке) с угловой частотой ω, соответствующей частоте переменного тока.
Если через катушки А, В и С протекают синусоидальные токи, сдвинутые по фазе на угол 2π/3, т. е. iA = Im sin ωt, iB = Im sin(ωt - 120°), iC = Im sin (ωt - 240°) = Im sin (ωt + 120°), то магнитные индукции этих катушек, пропорциональные токам в линейных цепях, можно представить в виде уравнений

Так как вектор магнитной индукции каждой катушки в центре системы направлен по ее оси, то можно записать:
 .
.
Представив в выражениях (12.3) синусы по формуле Эйлера и сложив векторы магнитных индукций катушек, получим для вектора результирующей магнитной индукции

Следовательно,
 (12.4)
(12.4)
Итак, вектор результирующей магнитной индукции, равный 1,5Вm, постоянен и вращается в отрицательном направлении с угловой частотой ω, т. е. вращающееся магнитное поле трехфазной системы является круговым. Магнитное поле перемещается в сторону той фазы, в которой ожидается ближайший максимум, т. е, направление вращения совпадает с чередованием тока в фазах (катушках). Путем изменения чередования тока в фазах осуществляют изменение направления вращения поля. На практике для изменения направления вращения поля достаточно поменять местами подключение проводов, подводящих ток из трехфазной сети к любым двум фазам.
studfiles.net

















 ,
,  .
. ;
;  .
.  ;
;

 ;
;  .
.  ;
;  ;
;  .
.