Асинхронный двигатель наиболее просты в изготовлении и наиболее дешёвые, поэтому применение их в регулируемых электроприводах весьма перспективно. Известны десятки способов регулирования частоты вращения асинхронного двигателя, однако до сих пор не найдено дешёвой и экономичной системы регулирования. Из формулы  следует, что скорость ротора (
следует, что скорость ротора ( ) можно регулировать тремя способами: путём изменения частоты сети (
) можно регулировать тремя способами: путём изменения частоты сети ( ), числа пар полюсов машины ( р ) и скольжения (S).
), числа пар полюсов машины ( р ) и скольжения (S).
Регулирование скорости путём переключения числа полюсов ступенчатое. При жёстких механических характеристиках двигателя, когда скольжение изменяется в небольших пределах, регулирование скорости экономичное. Следует иметь в виду, что ступени частоты вращения при частоте 50 Гц и р = 1 и 2 соответственно 3000 или 1500 об/мин, а при р = 5 и 6 – 600 и 500 об/мин. При большем числе полюсов разница между синхронными частотами вращения уменьшается.
Для изменения числа полюсов на статоре в одни и те же пазы можно уложить две отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом поочерёдно работают одна или другая обмотка, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путём изменения схемы обмотки переключать число полюсов.
В малых машинах применяют независимые обмотки для разных чисел полюсов, в больших пользуются одной и той же обмоткой с переключением числа полюсов. Для этого можно применить любую обмотку переменного тока, сделав в ней ряд дополнительных выводов и соединений между отдельными катушками и фазами.
Роторные обмотки двигателей с переключением числа полюсов. Обычно применяют коротко – замкнутые обмотки в виде беличьего колеса, т.к. они пригодны для любого числа полюсов. С электрической точки зрения беличьё колесо представляет собой многофазную обмотку, соединенную в звезду и замкнутую накоротко. При этом обмотки всех пар полюсов соединены параллельно. В беличьем колесе число фаз m2=z2/p, где z2 – число стержней на роторе, р – число пар полюсов.
Ротор с фазными обмотками должна переключаться на разное число полюсов. Переключение числа полюсов осуществляется аналогично переключению обмотки статора.
Двигатели с изменением числа полюсов называют многоскоростными.
Возможно переключение числа пар полюсов путём изменения схемы обмотки иллюстрирует рис. 3.22: При соединении обмоток по а) получают четыре полюса, а по б) – два.


Рисунок 3.22 Переключение числа пар полюсов: а) р=2; б) р=1
При переключении числа полюсов полюсное деление изменяется в 2 раза, при это изменяется и электрический угол фазной зоны с 60 на 120˚. Чтобы направление вращения поля при переключении числа полюсов оставалось неизменным, необходимо изменить порядок следования фаз путём переключения обмоток. На рис. 3.23 а) приведена схема включения обмоток по схеме звезда, а на рис. 3.23 б) показано переключение обмоток статора на схему двойная звезда:

Рисунок 3.23 Схема включения обмоток статора асинхронной машины по схеме звезда а) и по схеме двойная звезда б)
При таком переключении частота вращения изменяется в 2 раза, а
м



 омент остаётся тем же.
омент остаётся тем же.
Н
 а рис. 3.24 приведено переключение обмоток с на , которое приводит к увеличению скорости в 2 раза, момент асинхронного двигателя снижается в 2 раза, а мощность постоянна
а рис. 3.24 приведено переключение обмоток с на , которое приводит к увеличению скорости в 2 раза, момент асинхронного двигателя снижается в 2 раза, а мощность постоянна

Р



 исунок 3.24 Переключение обмоток
исунок 3.24 Переключение обмоток
а
 синхронного двигателя с а) на б)
синхронного двигателя с а) на б)
При проектировании многоскоростных двигателей стремятся сохранить высокие энергетические показатели на всех синхронных частотах вращения. Поэтому многоскоростные машины получаются с большим расходом активных материалов на единицу мощности по сравнению с обычными асинхронными двигателя.
Несмотря на то, что многоскоростные двигатели требуют сложной коммутационной аппаратуры и имеют несколько худшие энергетические показатели, они достаточно широко применяются в промышленности для привода станков, лифтов, вентиляторов и насосов, т.е. там где допустимо ступенчатое регулирование частоты вращения.
В серии 4А предусмотрен выпуск многоскоростных асинхронных двигателей на базе односкоростных с использованием сердечника статора и ротора базовых машин на мощности 0,12 – 50 кВт на две, три и четыре синхронных частоты вращения.
Наиболее простым способом, обеспечивающим плавное регулирование частоты вращения асинхронного двигателя, является изменение скольжения. Принципиальным недостатком этого способа регулирования частоты вращения является низкий кпд, т.к. потери в роторе пропорциональны скольжению. И какие бы не предлагались варианты схем изменения скольжения, а их существует десятки, в электромеханическом преобразователе энергии преобразование в тепло и в механическую мощность имеет равные возможности. В асинхронном двигателе эта связь проявляется особенно наглядно т.к. Рэ2=Рэм  S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
Наиболее распространённые способы изменения скольжения в асинхронном двигателе – это изменение напряжения, введение сопротивления в цепь ротора, искажение симметрии подводимых напряжений и введение ЭДС в цепь ротора.
При изменении напряжения источника питания  изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax:nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.
изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax:nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.
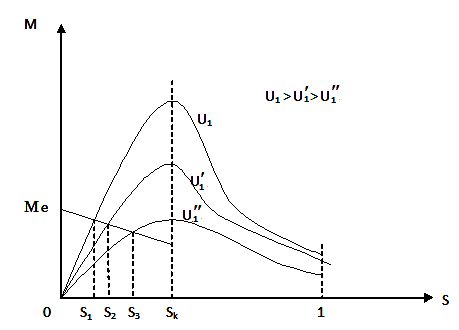
Рисунок 3.25 Механические характеристики асинхронного двигателя при изменении напряжения источника тока и нагрузки Ме
Изменять частоту вращения а.д. можно, вводя активное сопротивление в цепь ротора (Рис. 3.26).

Рисунок 3.26 Механическая характеристика асинхронного двигателя при изменении сопротивления в цепи ротора и нагрузки Ме
В двигателе с фазным ротором регулировочный реостат подключается к контактным кольцам, и при изменении активного сопротивления резистора двигатель плавно или ступенчато, в зависимости от конструкции трёхфазного резистора, переходит с одной механической характеристики на другую.
Преимущество регулирования частоты вращения путём изменения активного сопротивления ротора в том, что максимальный момент остаётся неизменным, т.к. не изменяется напряжение, подводимые к двигателю. Включение резистора в обмотку ротора приводит к тому, что частично потери в роторе выделяются и в резисторе, пропорционально отношению активных сопротивлений обмотки ротора и резистора. Выведение потерь из машины даёт возможность уменьшить габариты машины.
При регулировании частоты вращения асинхронных исполнительных двигателей находит применение комбинированный способ регулирования, когда изменяют подводимое к двигателю напряжение и активное сопротивление ротора.
При изменении частоты вращения ротора, изменяется частота тока в роторе f2=Sf1. За счёт изменения f2, при этом за счёт вытеснения тока в роторе можно получить необходимый закон изменения R2. При увеличении f2 растёт активное сопротивление короткого замыкания обмотки, выполненной в виде диска, и частота вращения изменяется за счёт изменения напряжения и активного сопротивления обмотки ротора.
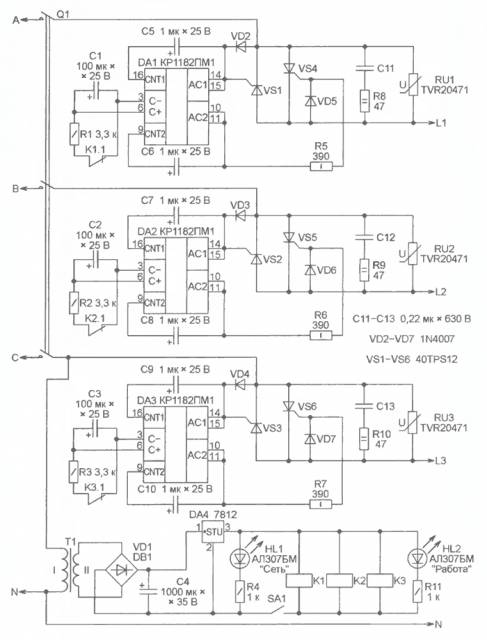
Регулирование напряжения на выводах двигателя осуществляется путём включения реакторов насыщения, магнитных усилителей, автотрансформаторов и тиристорных преобразователей напряжения. Последние в настоящее время получили наибольшее распространение.
Тиристорные преобразователи напряжения включают последовательно в обмотку статора двигателя (Рис. 3.27).
Через преобразователь проходит вся мощность двигателя, и габариты преобразователя несмотря на применение тиристоров в 1,5 – 2 раза больше двигателя.
Магнитные усилители в качестве регуляторов применяют реже, т.к. они имеют достаточно большие габариты.
Мощность скольжения  S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.
S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.

Рисунок 3.27 Тиристорный преобразователь напряжения включенный в цепь статора асинхронного двигателя
Такие схемы регулирования называются каскадными (Рис. 3.28).

Рисунок 3.28 Каскадная схема регулирования скорости асинхронного двигателя
Схема (Рис. 3.28) работает следующим образом. Мощность скольжения асинхронного двигателя после выпрямления подаётся на двигатель постоянного тока (ДПТ) на валу которого находится синхронный генератор (СГ). Синхронный генератор отдаёт энергию в сеть. Недостаток наличие машины постоянного тока и силовых выпрямителей. Габариты двигателя и выпрямителей зависят от пределов регулирования.
Есть много других схем регулирования путём изменения скольжения.
Наиболее перспективный способ регулирования частоты вращения асинхронного двигателя является частотный. (Рис.3.29) изменение частоты и напряжения источника питания осуществляется преобразователем частоты (ПЧ).

Рисунок 3.29 Регулирование скорости асинхронного двигателя ПЧ.
При преобразовании частоты f1 и напряжение сети ПЧ обеспечивает работу АД при постоянном потоке, U/f = const. Регулирование экономичное, однако через преобразователь проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя.
Регулировать частоту можно в статоре или в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, т.к. мощность скольжения  *S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
*S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
Несмотря на применение тиристоров частотный привод всё ещё не занял доминирующего положения в регулируемых приводах с асинхронным двигателем. В последнее время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешёвый малогабаритный преобразователь частоты на мощность в несколько десятков кВт. Следует иметь в виду, что введение в энергосистему нелинейных элементов(преобразователь частоты) приводит к появлению высших гармоник в сети и искажению синусоидальности напряжений. Ухудшение качества электроэнергии приводит к потерям в энергосистеме.
studfiles.net
Асинхронный двигатель наиболее просты в изготовлении и наиболее дешёвые, поэтому применение их в регулируемых электроприводах весьма перспективно. Известны десятки способов регулирования частоты вращения асинхронного двигателя, однако до сих пор не найдено дешёвой и экономичной системы регулирования. Из формулы  следует, что скорость ротора (
следует, что скорость ротора ( ) можно регулировать тремя способами: путём изменения частоты сети (
) можно регулировать тремя способами: путём изменения частоты сети ( ), числа пар полюсов машины ( р ) и скольжения (S).
), числа пар полюсов машины ( р ) и скольжения (S).
Регулирование скорости путём переключения числа полюсов ступенчатое. При жёстких механических характеристиках двигателя, когда скольжение изменяется в небольших пределах, регулирование скорости экономичное. Следует иметь в виду, что ступени частоты вращения при частоте 50 Гц и р = 1 и 2 соответственно 3000 или 1500 об/мин, а при р = 5 и 6 – 600 и 500 об/мин. При большем числе полюсов разница между синхронными частотами вращения уменьшается.
Для изменения числа полюсов на статоре в одни и те же пазы можно уложить две отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом поочерёдно работают одна или другая обмотка, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путём изменения схемы обмотки переключать число полюсов.
В малых машинах применяют независимые обмотки для разных чисел полюсов, в больших пользуются одной и той же обмоткой с переключением числа полюсов. Для этого можно применить любую обмотку переменного тока, сделав в ней ряд дополнительных выводов и соединений между отдельными катушками и фазами.
Роторные обмотки двигателей с переключением числа полюсов. Обычно применяют коротко – замкнутые обмотки в виде беличьего колеса, т.к. они пригодны для любого числа полюсов. С электрической точки зрения беличьё колесо представляет собой многофазную обмотку, соединенную в звезду и замкнутую накоротко. При этом обмотки всех пар полюсов соединены параллельно. В беличьем колесе число фаз m2=z2/p, где z2 – число стержней на роторе, р – число пар полюсов.
Ротор с фазными обмотками должна переключаться на разное число полюсов. Переключение числа полюсов осуществляется аналогично переключению обмотки статора.
Двигатели с изменением числа полюсов называют многоскоростными.
Возможно переключение числа пар полюсов путём изменения схемы обмотки иллюстрирует рис. 3.22: При соединении обмоток по а) получают четыре полюса, а по б) – два.


Рисунок 3.22 Переключение числа пар полюсов: а) р=2; б) р=1
При переключении числа полюсов полюсное деление изменяется в 2 раза, при это изменяется и электрический угол фазной зоны с 60 на 120˚. Чтобы направление вращения поля при переключении числа полюсов оставалось неизменным, необходимо изменить порядок следования фаз путём переключения обмоток. На рис. 3.23 а) приведена схема включения обмоток по схеме звезда, а на рис. 3.23 б) показано переключение обмоток статора на схему двойная звезда:

Рисунок 3.23 Схема включения обмоток статора асинхронной машины по схеме звезда а) и по схеме двойная звезда б)
При таком переключении частота вращения изменяется в 2 раза, а
м



 омент остаётся тем же.
омент остаётся тем же.
Н
 а рис. 3.24 приведено переключение обмоток с на , которое приводит к увеличению скорости в 2 раза, момент асинхронного двигателя снижается в 2 раза, а мощность постоянна
а рис. 3.24 приведено переключение обмоток с на , которое приводит к увеличению скорости в 2 раза, момент асинхронного двигателя снижается в 2 раза, а мощность постоянна

Р



 исунок 3.24 Переключение обмоток
исунок 3.24 Переключение обмоток
а
 синхронного двигателя с а) на б)
синхронного двигателя с а) на б)
При проектировании многоскоростных двигателей стремятся сохранить высокие энергетические показатели на всех синхронных частотах вращения. Поэтому многоскоростные машины получаются с большим расходом активных материалов на единицу мощности по сравнению с обычными асинхронными двигателя.
Несмотря на то, что многоскоростные двигатели требуют сложной коммутационной аппаратуры и имеют несколько худшие энергетические показатели, они достаточно широко применяются в промышленности для привода станков, лифтов, вентиляторов и насосов, т.е. там где допустимо ступенчатое регулирование частоты вращения.
В серии 4А предусмотрен выпуск многоскоростных асинхронных двигателей на базе односкоростных с использованием сердечника статора и ротора базовых машин на мощности 0,12 – 50 кВт на две, три и четыре синхронных частоты вращения.
Наиболее простым способом, обеспечивающим плавное регулирование частоты вращения асинхронного двигателя, является изменение скольжения. Принципиальным недостатком этого способа регулирования частоты вращения является низкий кпд, т.к. потери в роторе пропорциональны скольжению. И какие бы не предлагались варианты схем изменения скольжения, а их существует десятки, в электромеханическом преобразователе энергии преобразование в тепло и в механическую мощность имеет равные возможности. В асинхронном двигателе эта связь проявляется особенно наглядно т.к. Рэ2=Рэм  S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
Наиболее распространённые способы изменения скольжения в асинхронном двигателе – это изменение напряжения, введение сопротивления в цепь ротора, искажение симметрии подводимых напряжений и введение ЭДС в цепь ротора.
При изменении напряжения источника питания  изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax:nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.
изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax:nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.

Рисунок 3.25 Механические характеристики асинхронного двигателя при изменении напряжения источника тока и нагрузки Ме
Изменять частоту вращения а.д. можно, вводя активное сопротивление в цепь ротора (Рис. 3.26).

Рисунок 3.26 Механическая характеристика асинхронного двигателя при изменении сопротивления в цепи ротора и нагрузки Ме
В двигателе с фазным ротором регулировочный реостат подключается к контактным кольцам, и при изменении активного сопротивления резистора двигатель плавно или ступенчато, в зависимости от конструкции трёхфазного резистора, переходит с одной механической характеристики на другую.
Преимущество регулирования частоты вращения путём изменения активного сопротивления ротора в том, что максимальный момент остаётся неизменным, т.к. не изменяется напряжение, подводимые к двигателю. Включение резистора в обмотку ротора приводит к тому, что частично потери в роторе выделяются и в резисторе, пропорционально отношению активных сопротивлений обмотки ротора и резистора. Выведение потерь из машины даёт возможность уменьшить габариты машины.
При регулировании частоты вращения асинхронных исполнительных двигателей находит применение комбинированный способ регулирования, когда изменяют подводимое к двигателю напряжение и активное сопротивление ротора.
При изменении частоты вращения ротора, изменяется частота тока в роторе f2=Sf1. За счёт изменения f2, при этом за счёт вытеснения тока в роторе можно получить необходимый закон изменения R2. При увеличении f2 растёт активное сопротивление короткого замыкания обмотки, выполненной в виде диска, и частота вращения изменяется за счёт изменения напряжения и активного сопротивления обмотки ротора.
Регулирование напряжения на выводах двигателя осуществляется путём включения реакторов насыщения, магнитных усилителей, автотрансформаторов и тиристорных преобразователей напряжения. Последние в настоящее время получили наибольшее распространение.
Тиристорные преобразователи напряжения включают последовательно в обмотку статора двигателя (Рис. 3.27).
Через преобразователь проходит вся мощность двигателя, и габариты преобразователя несмотря на применение тиристоров в 1,5 – 2 раза больше двигателя.
Магнитные усилители в качестве регуляторов применяют реже, т.к. они имеют достаточно большие габариты.
Мощность скольжения  S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.
S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.

Рисунок 3.27 Тиристорный преобразователь напряжения включенный в цепь статора асинхронного двигателя
Такие схемы регулирования называются каскадными (Рис. 3.28).
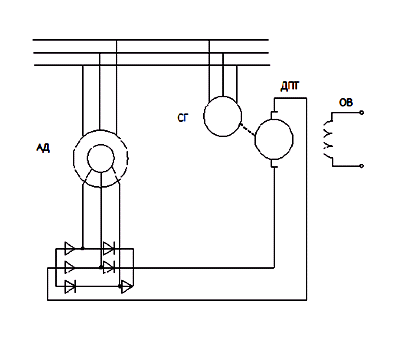
Рисунок 3.28 Каскадная схема регулирования скорости асинхронного двигателя
Схема (Рис. 3.28) работает следующим образом. Мощность скольжения асинхронного двигателя после выпрямления подаётся на двигатель постоянного тока (ДПТ) на валу которого находится синхронный генератор (СГ). Синхронный генератор отдаёт энергию в сеть. Недостаток наличие машины постоянного тока и силовых выпрямителей. Габариты двигателя и выпрямителей зависят от пределов регулирования.
Есть много других схем регулирования путём изменения скольжения.
Наиболее перспективный способ регулирования частоты вращения асинхронного двигателя является частотный. (Рис.3.29) изменение частоты и напряжения источника питания осуществляется преобразователем частоты (ПЧ).

Рисунок 3.29 Регулирование скорости асинхронного двигателя ПЧ.
При преобразовании частоты f1 и напряжение сети ПЧ обеспечивает работу АД при постоянном потоке, U/f = const. Регулирование экономичное, однако через преобразователь проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя.
Регулировать частоту можно в статоре или в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, т.к. мощность скольжения  *S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
*S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
Несмотря на применение тиристоров частотный привод всё ещё не занял доминирующего положения в регулируемых приводах с асинхронным двигателем. В последнее время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешёвый малогабаритный преобразователь частоты на мощность в несколько десятков кВт. Следует иметь в виду, что введение в энергосистему нелинейных элементов(преобразователь частоты) приводит к появлению высших гармоник в сети и искажению синусоидальности напряжений. Ухудшение качества электроэнергии приводит к потерям в энергосистеме.
studfiles.net
Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями. Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя к его минимальной частоте вращения. Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую. Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики. Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.
24
studfiles.net
При работе многих механизмов, приводящихся во вращение асинхронными двигателями, в соответствии с технологическими требованиями возникает необходимость регулировать скорость вращения этих механизмов. Способы регулирования частоты (скорости) вращения асинхронных двигателей раскрывает соотношение:
n=(1−S)n0=(1−S)60f/p.
Отсюда следует, что при заданной нагрузке на валу частоту вращения ротора можно регулировать:
изменением скольжения;
изменением числа пар полюсов;
изменением частоты источника питания.
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
На рис. 2.21 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3>Rр2>0,Rр1=0.

Рис. 2.21
Как следует из рис. 2.21 при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
На рис. 2.22 показана схема соединения и магнитное поле статора двигателя при последовательном (б) и параллельном (а) соединении полуобмоток.

Рис. 2.22
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов.
У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом p=1 и p=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом p=3 и p=6).
При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Mкр (рис. 2.23.б). Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным (рис. 2.23.а). Поэтому при этом способе регулирования могут быть получены два вида семейства механических характеристик (рис. 2.23).
Достоинства этого способа регулирования: сохранение жесткости механических характеристик, высокий К.П.Д. Недостатки: ступенчатое регулирование, большие габариты и большая стоимость двигателя.

Рис. 2.23
studfiles.net