Современное промышленное производство, как постоянно динамично развивающаяся система, требует применения для решения различных задач новых и инновационных технических решений. Вместе с тем, многие производства и сейчас используют в качестве двигателей станков, машин и различных механизмов старых надежных асинхронных двигателей.

Среди применяемых в производстве электронных систем и электрических машин, особое место занимает асинхронный двигатель – электрическая с электронным блоком управления машина, использующая переменный ток для преобразования электрической энергии в механическую.
Более глубокое раскрытие этого понятия основано на принципе использования магнитного поля для создания вращательного движения – статор создает магнитное поле, несколько большее по частоте, чем частота магнитного поля вращающегося ротора.
Магнитное поле заставляет вращаться ротор, при этом, его частота вращения несколько меньше, чем изменение магнитного поля статора, он как бы пытается догнать образовываемое статором поле.
Двигатели такого принципа являются наиболее распространенными видами электрических машин – это наиболее простой и экономичный тип преобразования электрической энергии переменного тока во вращательную механическую энергию.
Как и у большинства технически сложных механизмов, у таких моторов есть масса положительных сторон, главная из которых является отсутствие электрического контакта между подвижными и неподвижными частями машины.
Это достоинство асинхронников и является основным при выборе моделей двигателей в конструкторских разработках – отсутствие коллектора и щеток, контакта между статором и ротором значительно повышают надежность и удешевляют производство таких моторов.
Однако, следует заметить, что это правило справедливо только к одному из видов (хотя и наиболее распространенному виду) – двигателям с короткозамкнутым ротором.

Работу асинхронного электродвигателя, предназначенного для обычной электросети переменного электрического тока можно описать следующей схемой:
Таким образом, схемой работы асинхронного агрегата, является взаимодействие магнитного поля статора и токов, которые образуются этим самым магнитным полем в роторе двигателя.
 Устройство двигателя
Устройство двигателяНаиболее наглядно представить конструкцию агрегата можно на примере асинхронного двигателя, имеющего короткозамкнутый ротор, второй вид электромоторов имеет несколько иную конструкцию, это вызвано тем, что они используют промышленную сеть в 380 Вольт.
Основными составными частями такой электрической машины являются статор и ротор, которые не соприкасаются между собой и имеют воздушный зазор. Такая конструкция основных частей связана с тем, что в состав обеих основных частей электромотора входят так называемые активные части – состоящие из металлического проводника обмотка возбуждения.
Для каждой части имеются своя соответственно статорная и роторная обмотки и стальной сердечник – магнитопровод. Это основные части электродвигателя, принципиально необходимые для работы машины, все остальные части – корпус, подшипники качения, вал, вентилятор – это конструктивно необходимые, но абсолютно не влияющие на принцип работы прибора.
Они во многом играют важную роль, например, подшипники качения, обеспечивают возможность плавности хода, корпус защищает от механического воздействия на основные рабочие части, вентилятор обеспечивает обдув двигателя и отвод тепла, выделяемого при работе, но на принцип преобразования электрической энергии в механическую не влияют.
Итак, основными частями асинхронного электромотора, как электрической машины являются:
Кроме самого простейшего вида асинхронного электромотора с простым ротором, к семейству асинхронных двигателей относятся и машины, которые имеют более сложную конструкцию, обмотки, у которых имеются как у статора, так и ротора.
Трехфазные обмотки, а конструктивно их по одной на каждую фазу, соединяются подобно обмоткам статора или «звездой» или «треугольником», и концы обмоток этих выводятся на контактные кольца, которые вращаются на валу, электрический ток на них передается через щетки из графита. Этот тип электродвигателей имеет большую мощность и применяется уже в промышленных машинах и станках.
 В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В основном, такие моторы устанавливаются практически на всех бытовых приборах:
Трехфазные асинхронные моторы имеют различную мощность, от 150 Вт до нескольких киловатт, и применяются в основном в промышленности в качестве моторов для машин и механизмов.
Применение подобного типа моторов обусловлено приемлемым с точки зрения соотношения мощность/производительность, к тому же, как и их простейшие собраться такие двигатели не требуют большого внимания и кропотливого обслуживания, в особенности те типы корпуса, которые специально разработаны для работы в тяжелых условиях производства.
В виду различных конструкторских задач, стоящих перед разрабатываемыми машинами и механизмами в промышленном, серийном производстве, нашли свое применение асинхронные линейные электромоторы основных четырех видов:

С короткозамкнутым ротором.

С короткозамкнутым ротором.

С короткозамкнутым ротором.

С фазным ротором.
Особенностью конструкции является заложенный принцип работы однофазного асинхронного двигателя – у него только одна обмотка статора рабочая. А вот для пуска используется дополнительная обмотка, ее назначение — подключение к сети посредством конденсатора. Такое подключение используется для создания начального сдвига фаз и пускового момента, проще говоря, для того, чтобы вал начал вращаться.
Второй тип электрических моторов — двухфазные двигатели, имеют две рабочие обмотки. Такое техническое решение позволяет наиболее эффективно работать от однофазной сети, используя фазосдвигающий конденсатор для получения вращающегося магнитного поля.
Трехфазные асинхронники, имеют в своем составе по одной обмотке на каждую фазу подаваемого напряжения – три рабочие обмотки с соответствующим сдвигом относительно друг друга на 120 градусов. Это позволяет при включении в трехфазную сеть, получить электрическое поле, приводящее в движение короткозамкнутый ротор.
Для четвертого трехфазного асинхронника с фазным ротором, статор устроен таким же образом – три обмотки с соединением по типу звезда.
Ротор, в отличие от беличьих колес, имеет уже полноценную обмотку с выводами на щетки. Подключение обмотки, которого производится как напрямую, так и через реостаты. Такие машины имеют наибольший пусковой момент и наибольшую развиваемую мощность.

Вместе со всеми положительными качествами асинхронных двигателей, существует и неприятные моменты – слишком большой пусковой ток и невозможность регулировать скорость вращения ротора.
Решить эти проблемы можно, используя частотные преобразователи.
Принцип работы такого устройства в двух словах можно описать следующим образом: с помощью электронной схемы выпрямителя, сетевое напряжение сначала сглаживается, а после, фильтруется с помощью конденсаторов.
Использование таких частотных преобразователей при пуске, позволяет избежать обратного вращения вала двигателя, и существенно сократить (до 50%) потребляемую энергию.
househill.ru
резисторы. Рис. 6.14.
Рис. 6.14.
Схема управления пуском и динамическим торможением асинхронного двигателя
Постоянный ток протекает по всем обмоткам статора или по части их, создает постоянное во времени магнитное поле. В обмотках вращающегося по инерции ротора будет наводиться ЭДС и потечет ток, который создаст свое неподвижное в пространстве магнитное поле. Взаимодействие тока ротора с результирующим магнитным полем АД приведет к появлению тормозного момента и остановке ротора.
Преобразуемая при этом механическая энергия движущихся частей в электрическую рассеивается в виде тепла.
Пуск двигателя осуществляется нажатием кнопки SB1 (см. рис. 6.14).
После чего срабатывает линейный контактор КМ, подключающий обмотки статора к трехфазному источнику питания. Замыкающий блок-контактКМ в цепи реле времени КТ вызовет его срабатывание. В результате чего контакты этого реле замкнутся в цепи контактора торможения КМ1, но этот контактор не сработает, так как перед этим произойдет размыканиеблок-контактаКМ.
Нажатием кнопки SB3 производится остановка АД. Катушка линейного контактора теряет питание и контакты КМ в цепи обмоток статора размыкаются, отключая двигатель от сети переменного тока.
Одновременно с этим замыкается размыкающий блок-контактКМ в цепи катушки контактора торможения КМ1; последний включается и подает в обмотки статора постоянный ток от выпрямителя V через резистор RT и замыкающий блок контакт КМ1. АД переходит в режим динамического торможения.
С потерей питания катушки КМ, также размыкается замыкающий блок-контактКМ в цепи реле времени КТ. Это реле, потеряв питание, начинает отсчет выдержки времени. Через промежуток времени, соответствующий останову двигателя, реле КТ размыкает свои контакты в цепи катушки контактора КМ1.

уст.I
Обмотка статора отключается от источника постоянного тока и схема переходит в свое первоначальное состояние.
Задержкой срабатывания реле КТ и величиной регулируемого резистора Rт устанавливают время динамического торможения.
Схема управления реверсивным асинхронным двигателем с фазным ротором. Частоту вращения ротора асинхронного электродвигателя с фазным ротором можно регулировать, изменяя величину сопротивления в роторной цепи (см. подразд. 5.2).
Управлять такими электродвигателями возможно с помощью силовых и магнитных контроллеров (рис. 6.15). В настоящее время в подъемнотранспортных механизмах используются магнитные контроллеры, относящиеся к аппаратам дистанционного управления.
Рис. 6. 15. Схема управления трехфазным асинхронным двигателем с фазным
ротором: а) силовая схема; б) схема управления
В первом положении командоконтроллера “Вперед” замыкается контакт S1.1, подавая питание на катушку. Контактор КМ1 подключает обмотки статора двигателя и тормозной электромагнит YB1 к сети. В цепь ротора электродвигателя при этом включено полное сопротивление пускорегулирующего реостата, и двигатель разгоняется по характеристике I (см. рис. 5.4) до установившейся частоты вращения n при заданном моменте сопротивления Мс.
Во втором положении замыкается контакт S1.3 командоконтроллера и включается контактор КМ3, который закорачивает часть сопротивлений
реостата. Двигатель переходит на работу по характеристике II, разгоняется до частоты вращения nуст.II.
В третьем положении контроллера включается контактор КМ4, который закорачивает выводы обмотки ротора, и двигатель работает на естественной характеристике III с частотой вращения nуст.III.
Для выключения двигателя необходимо контроллер перевести в нулевое положение. Вращение “Назад” осуществляется постановкой рукоятки магнитного контроллера на позицию 1 “Назад”, при этом включается контактор КМ2. Происходит смена чередования фаз в обмотках статора и начинается обратное вращение ротора при полном включенном пускорегулирующем резисторе роторной цепи. Дальнейший процесс управления аналогичен описанному выше.
Особенностью работы двигателей подъемно-грузовыхлебедок является спуск груза. В этом случае груз не только преодолевает силы трения, но и стремится ускорить вращение двигателя в направлении спуска. Скорость двигателя очень быстро достигает синхронной, после чего двигатель начинает работать как генератор под действием силы тяжести груза, т.е., тормозя механизм. Если сопротивление в цепи ротора двигателя полностью закороченно, то скорость опускания груза на5–10% больше синхронной частоты вращения. Увеличение роторного сопротивления приводит к увеличению скорости спуска (а не к уменьшению, как это бывает при подъеме).
Схема автоматического пуска и торможения противовключением асинхронного двигателя с фазным ротором. Пуск двигателя совершается нажатием кнопки SB1 (вперед) или SB2 (назад), тем самым подается питание на катушку контактора КМ1 (или КМ2). Рассмотрим работу схемы при срабатывании контактора КМ1 (рис. 6.16).
Обмотки статора подключаются к сети, включается блокировочное реле РБ. Катушка РП не притягивает свой якорь из-замалой ЭДС ротора и размыкающий контакт РП замкнут. Затем замыкающим контактом РБ собирается цепь катушки контактора КП, шунтирующего своими контактами ступень сопротивлений Rn в цепи ротора.
 Рис. 6.16.
Рис. 6.16.
Схема торможения противовключением асинхронного двигателя с фазным ротором: а) силовая схема; б) схема управления
С помощью механического маятникового реле времени РВ, пристраиваемого к контактору КП, осуществляется выдержка времени, необходимая для некоторого разгона двигателя, после чего включается контактор КУ, шунтирующий сопротивления Rg в цепи ротора, и двигатель выводится на естественную характеристику.
Таким образом, пуск двигателя совершается в одну ступень с резистором в роторе Rg. Ступень резистора Rn служит для ограничения тока при торможении.
Если требуется реверсирование двигателя, то необходимо нажать на кнопку противоположного направления вращения (в нашем примере на кнопку SB2), не воздействуя на кнопку SB3 (стоп). При этом отключаются контакторы КМ1 и КП. Последний – из-заразмыкания контакторов КМ1 и РБ. Как только замкнется размыкающий контакт КМ1 в цепи катушки контактора КМ2, он включится, и двигатель переведется в режим торможения противовключением.
В приведенной на рис. 6.16 схеме реализуется управление торможением в функции угловой скорости (по величине ЭДС ротора, которая пропорциональна скольжению). Реле напряжения РП через выпрямитель V подключается к выводам обмотки ротора. Реле настраивается с помощью резистора Rр так, что при начале торможения, когда направления вращений магнитного поля статора и ротора противоположны (S=2), оно срабатывает, а при угловой скорости, близкой к нулю (S=1), когда напряжение на его катушке снижается почти вдвое, реле отпускает свой якорь. При пуске в обратную сторону реле РП не срабатывает, так как ЭДС ротора становится еще меньше, достигая нулевого значения при S=0.
После включения контактора КМ2, когда произойдет реверсирование магнитного поля статора, срабатывает реле РП и своим размыкающим
контактором разорвет цепь катушки контактора КП, что обеспечит на период торможения введение всех резисторов в цепь ротора (Rg и Rn). Блокировочное реле РБ служит для создания временного разрыва в цепи катушки контактора КП, оно отключается одновременно с контактором КМ1, а включается только после замыкания контактов контактора КМ2. Когда контакты РБ сомкнутся, уже успеет сработать реле РП.
По окончании процесса торможения контакт РП закроется и контактор КП зашунтирует ступень сопротивления Rn. Затем произойдёт изменение направления вращения ротора, то есть пуск в противоположном направлении (назад).
Если остановку двигателя производить кнопкой SB3, то обмотки статора отключатся от сети, но электрического торможения не произойдет, двигатель остановится под действием статического момента сопротивления на валу.
Схема пуска асинхронного двигателя с фазным ротором в функции времени. Упрощенная принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени [8] представлена на рис. 6.17. Пуск двигателя по этой схеме осуществляется в две пусковые ступени, при этом для большей надежности цепи управления подключены к сети постоянного тока.
 Рис. 6.17. Упрощенная
Рис. 6.17. Упрощенная
принципиальная схема пуска асинхронного двигателя с фазным ротором в функции времени: а) силовая схема; б) схема управления
При подключении цепей управления к источнику напряжения сразу включаются реле РУ1 и РУ2 через размыкающие блок-контактыКМ и КУ1. Реле без выдержки времени отключают катушки контакторов КУ1 и КУ2 от источника питания. Затем после нажатия кнопки SB1 и включения контактора КМ статор двигателя подключается к сети, а роторная цепь его замкнута на полностью включенные резисторы R1 и R2, так как силовые контакты контакторов КУ1 и КУ2 разомкнуты; начинается пуск АД.
Размыкающий контакт КМ в цепи катушки реле времени РУ размыкается, оно обесточивается, начинает отсчитывать выдержку времени при пуске на первой пусковой ступени. После выдержки времени реле РУ1 своим контактом замыкает цепь питания катушки контактора КУ1. Этот контактор зашунтирует пусковой резистор R1 своими силовыми контактами и снимает питание с реле времени РУ2 вспомогательным контактом КУ1. Реле РУ2 начинает отсчитывать выдержку времени, по окончании которой размыкающий контакт РУ2 замыкается, подключая к источнику питания катушку КУ2, в результате чего зашунтируется вторая ступень пускового сопротивления R2 и АД будет выведен на естественную характеристику.
Схема пуска асинхронного двигателя с фазным ротором в функции тока. Схема, приведенная на рис. 6.18, обеспечивает пуск асинхронного двигателя с фазным ротором в одну ступень в функции тока и динамическое торможение в функции скорости и включает оборудование:
•электромагнитные контакторы КМ1, КМ2, КМ3;
•реле тока КА;
•реле контроля скорости SR;
•реле напряжения KV;
•понижающий трансформатор Т;
•выпрямитель VD;
•предохранители FA1, FA2;
•тепловые реле КК1, КК2.
Реле контроля скорости SR размыкает свои контакты в цепи катушки электромагнитного тормоза КМ3, когда частота вращения уменьшается до значения, близкого к нулю, а замыкает, когда начнется разгон АД.
После включения автоматического выключателя нажимается кнопка пуска SB1. По известной схеме включается контактор КМ1, через силовые контакты которого статор АД подключается к сети. Бросок тока в цепи ротора, когда еще не замкнуты контакты КМ2, вызовет включение реле тока КА, последнее разорвет свои контакты в цепи катушки КM2. Таким образом, разбег начинается с пусковым сопротивлением R2g в цепи ротора.
 Рис. 6.18. Схема пуска АД в
Рис. 6.18. Схема пуска АД в
одну ступень в функции тока и динамического торможения в функции скорости
Вспомогательные контакты КМ1 замыкают цепь катушки промежуточного реле напряжения KV, шунтируют кнопку SB1, размыкают цепь контактора торможения КМ3. Несмотря на то, что реле KV включается, это не приводит к включению контактора КМ2, так как до этого в цепи разомкнулся контакт реле КА.
Трогание с места и вращение ротора вызывает замыкание контакта реле скорости SR в цепи тормозного контактора КМ3, но и этот контактор не сработает, так как до этого разомкнулся контакт КМ1. По мере разгона двигателя ток в цепи ротора уменьшается, и реле тока КА выключается, замыкая цепь контактора КМ2. Этот контактор зашунтирует резисторы R2g в цепи ротора, АД выйдет на естественную характеристику.
Для перевода в тормозной режим нажимается кнопка SB3. Контактор КМ1 теряет питание и отключается статор АД от сети, но включается тормозной контактор КМ3. Контактор КМ3 замыкает цепь питания катушек обмотки статора постоянным током от выпрямителя VD, подключенного к трансформатору Т. Тем самым осуществляется перевод АД в режим динамического торможения.
Одновременно с этим потеряет питание аппарат KV, а следовательно и КМ2, что приведет к вводу в цепь ротора резистора R2g. Двигатель начинает тормозить.
При скорости двигателя, близкой к нулю, реле контроля скорости SR размыкает свой контакт в цепи катушки контактора КМ3. Он отключается и прекращает торможение АД. Схема приходит в исходное положение и готова к последующей работе.
Принцип действия схемы не изменяется, если катушка реле тока включается в фазу статора, а не ротора при одноступенчатом разгоне двигателя.
Схема панели управления асинхронным двигателем типа ПДУ 6220.
Панель типа ПДУ 6220 входит в состав нормализованной серии панелей управления АД с фазным и короткозамкнутым роторами и обеспечивает пуск в две ступени и динамическое торможение в функции времени (рис. 6.19).
 Рис. 6.19. Схема панели
Рис. 6.19. Схема панели
управления асинхронного двигателя типа ПДУ 6220
При подаче на схему напряжений постоянного тока 220 В и переменного 380 В тока (замыкание рубильников Q1, Q2 и автомата QF) происходит включение реле времени КТ1, чем двигатель подготавливается к пуску с полным пусковым резистором в цепи ротора.
Одновременно с этим, если рукоятка командоконтроллера находится в нулевой (средней) позиции и максимально-токовыерелеFA1–FA3не включены, включается реле защиты KV от понижения питающего напряжения и готовит схему к работе замыканием своегоблок-контактораKV.
Пуск двигателя осуществляется по любой из двух искусственных характеристик или по естественной характеристике, для чего рукоятка SA должна устанавливаться соответственно в положение 1,2 или 3. При переводе рукоятки в любое из указанных положений SA включается линейный контактор КМ2, подключающий АД к сети, контактор управления тормозом КМ5, подключающий к сети катушку YA электромагнитного тормоза,

который при этом растормаживает двигатель, и реле времени KT3, управляющее процессором динамического торможения.
Перевод контроллера SA в положение 2 или 3 позволяет включить контакторы ускорения КМ3 и КМ4, скорость двигателя увеличивается.
Торможение АД происходит за счет перевода рукоятки SA в нулевое положение. Тогда отключаются контакторы КМ2 и КМ5, а включается контактор динамического торможения КМ1, который подключает АД к источнику постоянного тока. В результате этого будет идти интенсивный процесс комбинированного (механического и динамического) торможения АД, который закончится после отсчета реле своей выдержки времени, соответствующей времени торможения.
Схема управления тиристорным приводом переменного тока. Схема управления тиристорным приводом переменного трехфазного тока содержит тиристорный преобразователь, который включается в цепь статорных обмоток двигателя и осуществляет фазовое регулирование подводимого к двигателю напряжения (рис. 6.20).
Последовательно со статорными обмотками двигателя встречнопараллельно через быстродействующие предохранители FU включены три пары тиристоров преобразователя U. Регулированием угла открывания тиристоров с помощью системы управления СУ изменяется напряжение, подводимое к двигателю, а следовательно, и его момент.
Рис. 6.20. Схема управления асинхронного двигателя с тиристорным
преобразователем: QF – автоматический выключатель; В – датчик тока; U – тиристорный преобразователь; FU – предохранитель; KK – командоконтроллер; СУ-
система управления тиристорным преобразователем; BR – тахогенератор; КМ – электромагнитные контакторы
В результате получается ряд мягких механических характеристик, обеспечивающих плавный пуск и разгон механизма. При использовании обратной связи по частоте вращения, осуществляемой с помощью тахогенератора BR, жесткость механических характеристик увеличивается, что позволяет получить устойчивые промежуточные и низкую посадочную скорости.
Схемой предусмотрен контактный реверс двигателя контакторами КМ2 и КМ3. Переключение контакторов происходит при отсутствии тока в главной цепи под контролем датчика тока В. Бестоковая коммутация значительно повышает износостойкость аппаратуры.
С помощью тиристоров преобразователя может быть получено и регулируемое динамическое торможение, а также торможение противовключением. Управление углом открывания тиристоров может осуществляться ступенчато командоконтроллером КК, или плавно другим аппаратом, например, сельсином.
6.5. Крановые защитные панели
Крановые защитные панели применяют при контроллерном управлении двигателями крана. Конструкция защитной панели представляет собой металлический шкаф с установленной в нем аппаратурой. Шкаф закрыт дверью с замком. Второй замок заблокирован с главным рубильником, то есть дверь панели не откроется, пока не будет выключен рубильник, обесточивающий электрооборудование. Размещаются защитные панели обычно в кабине крана. На защитной панели установлена электроаппаратура, осуществляющая следующую защиту:
•максимальную от токов короткого замыкания и значительных (свыше 250 %) перегрузок крановых электродвигателей;
•нулевую, исключающую самозапуск двигателей после перерыва в электроснабжении;
•концевую, обеспечивающую автоматическое отключение электроприводов при переходе механизмами крана предельно допустимых положений.
Панели допускают подключение от трех до шести двигателей (рис. 6.21). В зависимости от числа защищаемых двигателей и соотношения их мощностей панели комплектуются соответствующим количеством блок-релемаксимального тока, которые при срабатывании воздействуют на один, общий для группы издвух-четырехреле, контакт. Этим уменьшается число
studfiles.net
Как подключить трех фазный двигатель в сеть переменного тока напряжением в 220 В - спросите вы. Ведь на самом двигателе 3 фазы а сеть имеет 2 провода. Давай попробуем с этим разобраться.

Асинхронными двигателями они называются потому что у них отличаются частоты вращения магнитного поля статора и ротора. Получается что ротор пытается догнать или сравнять эти частоты. Таким образом и происходит вращение.
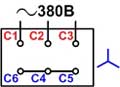
Обмотки статора, которых там 3 штуки имеют 2 способа подключения:

На крышке двигателя имеются выводы которые обозначаються как C1-C6. C1-C3 это концы обмоток, а C4-C6 это их начала. Как осущствляеться подсоединение обмоток в ту или иную конйигурация показано на рисунках ниже.

Принцип действия таких двигателей основан на всеми известным законом электромагнитной индукции. Статор двигателя имеет 3 обмотки на них поочередно подается напряжение. В обмотках возникает электрический ток который также поочередно появляется в этих обмотках.
Электрический ток как известно создает "вокруг" себя переменное магнитное поле. А по закону электромагнитной индукции переменное магнитное поле наводит в металле электрический ток. В результате в обмотке ротора наводится электрический ток. Данный ток создает свое магнитное поле которое взаимодействует с магнитным полем статора. Получается своего рода аналог двух магнитов которые взаимодействуют с собой. Как отталкиваются и притягиваются магниты, объяснять думаю не стоит.
В роторе не подводиться электрический ток - это стоит понимать. Обмотки ротора замыкаются между собой при помощи блока переменных сопротивлений. Переменное сопротивление используется в этом случае для регулировки частоты вращения двигателя. Изменяя при помощи него ток ротора меняется сила взаимодействия ротора и статора.
Для того чтобы подключить асинхронный двигатель нам нужно два вывода обмотки соеденить через конденсатор между собой и сделать вывод. При подсоединении нашего асинхронника к сети 220В по схеме представленной выше, выдаваимая им мощность будет составлять 0.7 от номинальной. Это происходит потому что мы присоединяем 3-х вахный двигатель в одно вазную сеть. Для расчета емкости можно использовать приближенную формулу:
С=P/10
где:
С - емкость в мкФ
P - мощность двигателя в Вт
Рабочее напряжение конденсатора должно быть больше напряжения в сети. На схеме также представлен пусковой конденсатор, номинал его емкости долже быть в 3-4 раза больше рабочей емкости. Пусковой конденсатор необходим для компенсации значительных пусковых токов в момент запуска двигателя, т. к. возникают значительные напряжения самоиндукции в момент пуска.
Довольно часто получаеться так что под рукой не оказывается нужной емкости. Для выхода из этой ситуации нужно использовать параллельное соединение конденсаторов.
www.radio-magic.ru
Рассмотрим весьма распространенную схему управления асинхронным двигателем при помощи магнитного пускателя.

Устройство однофазного асинхронного двигателя.
На рис.1 приведена схема управления без возможности изменения направления вращения (реверсирования). Нереверсивный магнитный пускатель состоит из трехполюсного контактора и теплового реле.
Проследим устройство и работу вначале силовых (главных) цепей, а затем цепей управления.

Рисунок.1 Схема управления асинхронным короткозамкнутым двигателем при помощи нереверсивного магнитного пускателя.
Силовые цепи. Трехфазный ток к статору электродвигателяД поступает через трехполюсный рубильник Р. Рубильник дает возможность отключить электродвигатель в случае ремонта или выхода из строя магнитного пускателя. Далее в силовой цепи находятся предохранители 1П, которые помещаются обычно на групповом распределительном щитке; они защищают цепи от коротких замыканий. Главные контакты Л трехполюсного линейного контактора включают или отключают обмотку статораэлектродвигателя. Подключены главные контакты таким образом, чтобы подвижные контакты располагались со стороны двигателя, а неподвижные, всегда находящиеся под напряжением, - со стороны сети, такое подключение повышает безопасность обслуживания. Тепловые реле включаются в две фазы, так как чрезмерно большой ток возможен не менее чем в двух проводах, они служат для защиты двигателя от длительных перегрузок и от работы на двух фазах.
Применение в схеме наряду с тепловыми реле плавких предохранителей объясняется тем, что силовые контакты магнитных пускателей допускают разрыв токов перегрузки не больше семикратной величины номинального тока электродвигателя, мощность которого допустима в данном пускателе; а на разрыв токов короткого замыкания эти контакты не рассчитаны. В силовую цепь включаются нагревательные элементы реле.
Цепи управления. Питание цепи управления осуществляется здесь через рубильник и предохранители главной цепи. Кроме того, цепи управления защищены своим одним предохранителем 2П, он защищает цепь управления от коротких замыканий. Как видно из схемы, цепь управления питается напряжением такой же величины, что и силовая цепь.
В цепь управления включены кнопки «стоп» и «пуск».

Рисунок 2 Схема управления асинхронным короткозамкнутым двигателем с возможностью реверсирования.
Катушка Л линейного контактора с блок-контактном Л1 при помощи своих главных контактов Л в силовой цепи осуществляет включение и отключение электродвигателя Д. Далее в цепь управления включены размыкающие контакты (с ручным возвратом) тепловых реле 1РТ и 2РТ, нагревательные элементы которых включены в главную цепь. У некоторых типов тепловых реле имеются два нагревательных элемента и только один размыкающий контакт, на который может воздействовать посредством рычажной системы каждая из биметаллических пластин.
Схема работает следующим образом. Для пуска двигателя после включения рубильника Р следует нажать кнопку «пуск». При этом замыкается цепь катушки контактора Л. Ток идет по следующей цепи: фаза Л1 - предохранитель 2П - размыкающая кнопка «стоп» - кнопка «пуск» - катушка контактора Л - размыкающие контакты тепловых реле 1РТ и 2РТ - фаза Л3. Вследствие того, что по катушке контактора проходит ток, сердечник ее намагничивается, якорь втягивается и включает главные контакты. Выводы обмотки статора С1C2С3 присоединяются к сети питания Л1, Л2, Л3, и двигатель включается. Одновременно с главными контактами замыкаются и блок-контакты так, что цепь катушки контактора замыкается через блок-контакт Л1 шунтирующий кнопку «пуск». Теперь уже не нужно больше удерживать кнопку в нажатом состоянии; за счет действия пружины она возвращается в исходное положение. Для отключения двигателя следует нажать кнопку «стоп»; при этом питание катушки контактора Л прерывается, и главные контакты под действием веса или пружины размыкаются и отсоединяют обмотку статора от сети.

Статор трехфазного асинхронного двигателя.
Рассмотренная схема осуществляет и так называемую «нулевую» (или минимальную) защиту: при исчезновении или значительном снижении напряжения сети до 35—40% номинального значения контактор отключается и отключает электродвигатель от сети.
При восстановлении напряжения самопуска двигателя уже не произойдет, так как кнопка «пуск» отпущена, а блок-контакт Л1 разомкнут.
В случае длительной перегрузки размыкающий контакт теплового реле 1РТ (2РТ) отключает контактор, а следовательно, и двигатель. После действия реле тепловой защиты (если тепловое реле выполнено по принципу принудительного возврата) для возврата контакта реле в исходное положение следует нажать на кнопку, которая помещается на крышке пускателя; возврат контактов реле 1РТ (2РТ) после отключения возможен только через время, необходимое для того, чтобы биметаллические пластинки остыли.
Магнитные пускатели изготовляются для управления электродвигателями до 75—100 кВт. Рассмотренная схема может быть собрана также и с контактором. Для асинхронных двигателей напряжением до 500 В обычно применяются трехполюсные контакторы переменного тока серии КТ с катушкой переменного тюка.

Асинхронный двигатель с фазным ротором.
Для управления механизмами, требующими изменения направления вращения (реверсирования), применяется либо реверсивный магнитный пускатель, либо схема управления с двумя контакторами, мало отличающаяся от схемы реверсивного пускателя.
На рис. 2 приведена схема управления асинхронным короткозамкнутым двигателем с возможностью реверсирования. Как и схема управления с магнитным пускателем, данная схема допускает дистанционное управление, так как кнопки управления, которых в этой схеме три - «вперед», «назад» и «стоп», можно поместить на некотором расстоянии от двигателя. При помощи схемы, изображенной на рис. 2, можно пустить двигатель (и, следовательно, связанный с ним механизм), изменить направление вращения, остановить его; кроме того, схема осуществляет защиту установки от коротких замыканий, от перегрузки, от падения напряжения в сети (нулевая защита) и от самопуска. В этой схеме совмещаются две схемы нереверсивного пуска и имеются некоторые особенности. Схема снабжена двумя контакторами: контактором «вперед» (катушка и ее три главных контакта обозначены буквой В, а блок-контактыB1и В2) и контактором «назад» (катушка и три главных контакта обозначены буквой Н, а блок-контакты h2 и Н2). Главные контакты контакторов В и Н включены в силовую цепь таким образом, что когда замыкаются контакты В (контакты Н при этом разомкнуты), на обмотку статора подаются три фазы сети в одном порядке, а когда замыкаются контакты Н, две фазы из трех меняются местами. В связи с этим магнитное поле статора двигателя начинает вращаться в обратную сторону, и двигатель реверсируется.
Действительно, при включении контактов В фаза Л1 сети подается на обмотку статора С1, фаза Л2- на С2, фаза Л3- на С3. Если же замыкаются контакты Н, то фаза Л1 подается на обмотку С3, фаза Л2 - на С2 (без изменения), фаза Л3 - наС1, следовательно, фазы Л1 и Л3 меняются местами.
Схема работает следующим образом. Для включения двигателя в направлении «вперед» нажимается кнопка «вперед»; при этом ток от фазы Л2 идет по цепи: 1 - 3 - 5 - 7 - 6 - 4 - 2 - фаза Л3; катушка В замыкает свои главные контакты В, и двигатель включается на движение «вперед». Для изменения направления вращения включается кнопка «стоп», а затем включается кнопка «назад»; при этом ток идет по цепи: фаза Л2 - 1 - 3 - 9 - 11 - 6 - 4 - 2 - фаза Л3. Теперь ток уже идет по катушке Н, которая замыкает свои контакты, и двигатель реверсируется. Одновременное включение обоих контакторов в рассмотренной схеме может привести к короткому замыканию в силовой цепи. Если двигатель включить в направлении, например, «вперед» и по ошибке нажать кнопку «назад», то катушка Н также включит свои контакты (контакты В были включены ранее, поскольку двигатель работал в направлении «вперед»), в силовой цепи окажутся включенными все шесть главных контактов, что приведет к короткому замыканию в двух фазах (Л1и Л3). Чтобы этого не произошло, в схеме применяются двухцепные кнопки «вперед» и «назад»; при нажатии кнопки «вперед» одновременно размыкается контакт в цепи катушки Н, и наоборот, если нажать кнопку «назад», то размыкается контакт катушки В. Это устройство называется механической блокировкой. Для увеличения надежности работы схемы механической блокировкой снабжаются также якори катушек контакторов, которые имеют специальный рычаг: втягивание якоря одной катушки делает невозможным одновременное втягивание якоря второй катушки.
Кроме механической применяется также электрическая блокировка. На рис. 2 кнопки управления «вперед» и «назад» обычные; однако в цепь катушки «вперед» включен размыкающий контакт контактора «назад», и наоборот, в цепь катушки «назад» включен размыкающий контакт контактора «вперед». Если нажать, например, кнопку «назад», то ток пройдет по катушке контактора «назад», контактор замкнет свои замыкающие контакты и разомкнет свой размыкающий контакт Н2 в цепи катушки В. Следовательно, пока включена катушка контактора Н, цепь катушки контактора В будет разомкнутой, и включить катушку В одновременно с катушкой Н невозможно. Это устройство называется электрической блокировкой. Для увеличения надежности работы схемы одновременно с электрической применяют механическую блокировку.
Поделитесь полезной статьей:
Topfazaa.ru
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2'(1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Zн.
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
electroandi.ru
Схемы асинхронных двигателей
В практической части рассмотрены многие схемы асинхронных электродвигателей для того, чтобы охарактеризовать их возможности, показать основные этапы работы двигателей. Схема асинхронного электродвигателя показана на рис. 2. 15. В его схеме и принципе действия есть сходство с трансформатором. Отличие заключается в том, что вторичная обмотка размещается на вращающемся роторе и не связана с внешней сетью. На схеме рис. 2. 15, а эта обмотка состоит из стержней, замкнутых накоротко, что соответствует двигателю с короткозамкнутым ротором, а в двигателях с фазовым ротором она соединяется с внешними сопротивлениями — рис. 2. 15, б.

Рис. 2. 15. Схемы асинхронных двигателей: а) асинхронный двигатель с короткозамкнутым ротором; 6) асинхронный двигатель с фазным ротором; 1 — обмотки статора, 2 — ротор с короткозамкнутыми стержнями, 2 — обмотки фазного ротора, 3 — контактные кольца, 4— сопротивления в цепи фазного ротора. Обмотка статора равномерно распределена по его окружности. Обмотки фаз статора соединяются в звезду или в треугольник.
Проверка схемы соединения обмоток
Большинство двигателей в коробках зажимов имеют шесть выводов, соответствующих началам и концам их фазных обмоток. Обычно выводы всех фаз обмотки статора двигателя расположены в коробке зажимов согласно рис. 2.17, а. Такое расположение дает возможность получить соединение фазных обмоток статора в звезду при соединении горизонтально перемычками нижних зажимов и в треугольник при соединении вертикальных пар зажимов (рис. 2.17, б, в). В некоторых двигателях обмотки фаз статора соединены в звезду и в коробке зажимов находятся только выводы С1, С2 и С3. Следует учесть, что выводные концы обмоток фаз двигателя одеваются на шпильки и прижимаются гайками, которые могут быть слабо затянуты, поэтому нужно проверять крепление выводных концов их пошатыванием. При слабом креплении этих концов нужно отсоединять подводящие провода и перемычки и затягивать гайки крепления выводных концов обмотки двигателя.

Выводы обмоток статора трехфазного асинхронного электродвигателя: а) схема присоединения начал и концов обмоток к зажимам колодки в выводной коробке; б) схема включения обмоток статора в звезду и соединение выводных зажимов; в) схема включения обмоток статора в треугольник и соединение выводных зажимов.
Измерение сопротивления изоляции. Об измерении сопротивления изоляции рассказано в гл. 5. Величина сопротивления изоляции электродвигателя согласно ПУЭ не нормируется, но в стандарте указано, что величина сопротивления изоляции электрических машин должна быть не менее 1 кОм на 1 В номинального напряжения машины. Пробный пуск двигателя. Электродвигатель включают на 2...3 с и проверяют: направление вращения, работу вращающихся частей двигателя и вращающихся и движущихся частей механизма; действие пусковой аппаратуры.
При любых признаках неисправности электрической или механической части двигатель останавливается и неисправности устраняются. Нужное направление вращения механизма бывает на нем обозначено стрелкой. Нужно также помнить, что при правильном направлении вращения рабочих колес турбомашин (насосов, вентиляторов и т. д.) их лопатки загнуты назад относительно направления вращения. Правильное направление вращения двигателей транспортирующих машин (транспортеров, шнековых и ковшовых подъемников и др.) определяется по движению их рабочих органов. Для изменения вращения двигателя достаточно отсоединить от зажимов два провода, подводящих напряжение к двигателю, поменять их местами и снова присоединить. Обычно это делается на выходе пускового аппарата. Кратковременное включение повторяют 2—3 раза, увеличивая продолжительность включения.
Проверка электродвигателя на холостом ходу и под нагрузкой
Проверку электродвигателя на холостом ходу производят при отсоединенном механизме. Если отсоединить механизм нельзя, то проводится проверка при ненагруженном механизме. Продолжительность проверки — 1ч. При этом проверяют нагрев подшипников, корпуса двигателя, наличие вибрации, характер шума подшипников. При ненормальном шуме подшипников и их перегреве двигатель приходится разбирать и устранять причину. При невозможности устранить причину ненормальной работы подшипника он заменяется.
При повышенном нагреве корпуса двигателя (большем, чем у других нормально работающих двигателей) он останавливается и производится проверка прилегания контактов в аппаратах, через которые подводится напряжение к двигателю, проверка плотности затягивания зажимов проводов, начиная от выводных концов в коробке двигателя.
При исправности цепи, подводящей напряжение к двигателю, и его повышенном нагреве он должен отправляться в капитальный ремонт. Перед этим у него должно быть проверено соответствие обозначений выводных концов фазных обмоток, измерено сопротивление обмоток постоянному току, что делается при наладке опытными специалистами. После проверки двигателя на холостом ходу начинается его проверка под нагрузкой. При нормальной работе двигателя в течение 20...30 мин с механизмом далее продолжается его обкатка вместе с механизмом не менее 8 ч. При этом прирабатываются подвижные детали механизмов, проверяется на нагрев электрооборудование, выявляются его слабые места. Режим обкатки определяется механиками, производившими монтаж технологического оборудования.
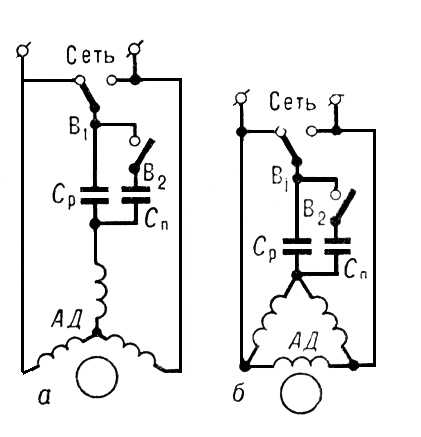
Работа трехфазного двигателя в однофазной сети
На практике может потребоваться применение трехфазного двигателя в однофазной сети, например, при выходе из строя двигателя стиральной машины или другой бытовой машины, когда замены нет, а есть трехфазный двигатель. Одна из схем такого применения показана на рис. 2.21, где к двум вершинам треугольника подводится напряжение сети, равное 220 В, а к третьей — пусковая емкость Сп через контакт выключателя, замыкающийся на время пуска двигателя для создания пускового момента, и рабочая емкость Ср, включаемая на все время работы двигателя. Соединение обмоток двигателя треугольником предпочтительнее, так как при этом к фазной обмотке двигателя подводится напряжение, равное напряжению сети, большее, чем при соединении звездой, и получается большой крутящий момент.
Рис. 2.21. Применение трехфазного двигателя в однофазной сети: Q — выключатель неавтоматический, имеющий средний контакт с самовозвратом, Сп, Ср — емкости пусковая и рабочая.
При напряжении сети 220 В и частоте сети 50 Гц рабочая емкость, мкф, Ср = 66Рн, где Pн. — номинальная мощность двигателя, кВт. Пусковая емкость, мкф Сп = 2Ср = 132Рн. Если двигатель запускается без пусковой емкости, то ее можно не применять.
Новые технологии на страже водосбережения

naukam.ucoz.ru
Запуск асинхронных короткозамкнутых двигателей малой и средней мощности производится чаще всего путем непосредственного включения статора двигателя в сеть.

Устройство асинхронных машин.
Наиболее часто применяемая схема управления двигателем приведена на рис. 1.
Защита силовой цепи осуществляется плавкими предохранителями П и двумя тепловыми реле 1РТ и 2РТ. Плавкие предохранители П защищают силовую цепь от коротких замыканий, а тепловые реле 1РТ и 2РТ защищают двигатель от перегрузок, превышающих номинальную нагрузку на 10—20%.

Рис. 1 Схема управления асинхронным короткозамкнутым двигателем.
Включение и отключение двигателя производится линейным контактором Л, н/о силовые контакты которого находятся в силовой цепи двигателя. Управление двигателем производятся дистанционно от кнопочной станции, состоящей из двух кнопок, Пуск и Стоп.
Линейный контактор Л и тепловые реле 1РТ и 2РТ представляют собой один аппарат — магнитный пускатель. При нажатии кнопки Пуск катушка контактора Л получает питание и притягивает якорь с укрепленными на нем подвижными контактами. При помощи силовых контактов двигатель включается в сеть, а блокировочный н/о контакт Л шунтирует кнопку Пуск, что позволяет отпустить эту кнопку, не прерывая питания катушки Л.
Остановка двигателя осуществляется кнопкой Стоп, а в случае перегрузки двигателя — размыканием контактов тепловых реле 1РТ и 2РТ.
Магнитный пускатель осуществляет также так называемую «нулевую защиту». При снижении напряжения на катушке Л до величины 0,8 U/ном. якорь контактора отпустится и двигатель отключится.Если по условиям технологического процесса необходимо изменять направление вращения производственного механизма, то управление двигателем осуществляется при помощи реверсивного магнитного пускателя, состоящего из двух контакторов: В — «вперед» и Н — «назад», которые управляются соответствующими кнопками Вп, Нз и Стоп (рис. 2).

Рис. 2 Схема управления асинхронным короткозамкнутым двигателем для двух направлений вращения.
Защита силовых цепей аналогична схеме, приведенной на рис. 1. Для предотвращения одновременного включения контактов В и Н (что может привести к короткому замыканию в силовой цепи) в схеме предусмотрены две блокировки. Одна из них выполнена н/з контактами Н и В в цепях катушек контакторов и исключает возможность одновременного включения контакторов Н и В. Вторая блокировка, выполненная контактами кнопок управления, предусматривает размыкание цепи отключаемого контактора, прежде чем произойдет замыкание цепи включаемого.
На рис. 3 представлена схема управления асинхронным короткозамкнутым двигателем с активным сопротивлением в статорной цепи. Эта схема применяется для ограничения колебаний напряжения в маломощных электрических сетях при значительных пусковых токах.

Рис. 3 Схема управления асинхронным короткозамкнутым двигателем с активным сопротивлением в статорной цепи.
При нажатии на кнопку Пуск контактор У включает статор двигателя в сеть через ограничивающее сопротивление. Одновременно приходит в действие пристроенное к контактору маятниковое реле РУ. Это реле включит контактор Л спустя то время, которое необходимо для разбега двигателя до номинальной скорости.
Контактор Л сработает и своими главными контактами зашунтирует ограничивающее сопротивление.
Во всех вышеприведенных схемах торможение привода происходит за счет сил трения. Приведем некоторые схемы, предусматривающие электрическое торможение.
Схема с динамическим торможением представлена на рис.4. При нажатии кнопки Пуск включается катушка контактора Л, который своими главными контактами подключает статор двигателя к сети переменного тока. Блок-контакт контактора Л включает катушку реле времени РВ в сеть постоянного тока, и реле РВ, срабатывая, замыкает свой н/о контакт в цепи катушки контактора торможения Т. На этом заканчивается операция пуска.

Рис. 4 Схема управления асинхронным короткозамкнутым двигателем с динамическим торможением.
При нажатии на кнопку Стоп размыкается цепь катушки контактора Л, контакты которого отключают двигатель от переменного тока. Нормально-закрытый блок-контакт контактора Л подготавливает цепь для включения контактора Т, а н/о блок-контакт Л размыкает цепь катушки реле времени РВ.
Одновременно через замкнутый контакт реле времени РВ и н/з блок-контакт Л получит питание катушка контактора Т, которая встанет на самоблокировку при помощи н/о блок-контакта Т и таким образом подключит статор двигателя к сети постоянного тока. Двигатель при этом работает в режиме динамического торможения.

Рис. 5 Рис. Схема управления асинхронным короткозамкнутым двигателем с торможением.
Реле времени РВ настроено так, чтобы его выдержка была несколько больше времени торможения электродвигателя, поэтому реле своими контактами разомкнет цепь контактора Т после того, как произойдет остановка двигателя.
На рис. 5 изображена схема управления асинхронным короткозамкнутым двигателем в режиме противовключения. Пуск осуществляется аналогично вышеприведенным схемам. При нажатии на кнопку Стоп катушка контактора Л теряет питание и двигатель отключается от сети. Нормально-закрытый блок-контакт Л замкнется, и катушка контактора Т получит питание. Во время вращения двигателя контакты реле контроля скорости РКС замкнуты и размыкаются при скорости двигателя , близкой к нулю.
Таким образом, до размыкания контактов РКС, т. е. почти до полной остановки привода, двигатель работает в режиме противовключения, что обеспечивает быструю остановку его.
Поделитесь полезной статьей:
Topfazaa.ru