ПРЯМОЙ - ПЛАВНЫЙ - ЗВЕЗДА-ТРЕУГОЛЬНИК - ЧЕРЕЗ ПРЕОБРАЗОВАТЕЛЬ
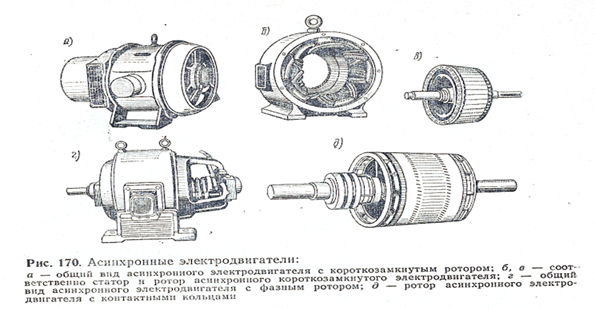
Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки. При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.

Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Основной проблемой прямого пуска становится подключение нескольких электродвигателей к маломощной подстанции или генератору: включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора. Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя. В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
В начало
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя. Простейший и наиболее старый способ плавного пуска – реостатный пуск электродвигателя: в цепь статора последовательно включается несколько мощных резисторов, последовательно закорачиваемых контакторами. Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Проблематичность автоматизации.
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов. Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
Постоянное токоограничение. В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает. Формирование тока. В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
Ускоренный пуск (кик-старт). Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
Останов на выбеге. При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
Линейное снижение напряжения. Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
В начало
Другим способом запуска, использующимся на трехфазных двигателях, является перекоммутация обмоток: в момент пуска обмотки соединяются звездой, по мере разгона ротора обмотки переводятся в нормальное включение треугольником.

Такой метод пуска фактически является частным случаем способа пуска асинхронного электродвигателя на пониженном напряжении, так как напряжение на обмотках при этом снижаетсяпримерно в 1,73 раза.
Подобный способ пуска может быть легко реализован с помощью набора контакторов с ручным управлением или с приводом от реле времени, поэтому достаточно дешев и распространен. Основные недостатки этого способа:
В начало
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:

Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
В начало
© 2012-2018 г. Все права защищены.
Все представленные на этом сайте материалы имеют исключительно информационный характер и не могут быть использованы в качестве руководящих и нормативных документов
eltechbook.ru
Существуют требования, которым должен отвечать запуск асинхронного двигателя. Во-первых, это отсутствие необходимости в использовании специальных устройств. Во-вторых, это сведение пусковых токов до минимума и пускового момента (далее Мпуск) до максимума. Рассмотрим способы пуска асинхронного двигателя, удовлетворяющие выдвинутым требованиям.
Подразумевает подключение намоток статора к электросети без «посредников». Подходит моторам с короткозамкнутым ротором. Это двигатели небольшой мощности, у которых при подключении напрямую к электросети статорных обмоток, образующимися пусковыми токами не вызывается перегрев, способный вывести технику из строя.
В асинхронных двигателях соотношение индуктивности обмоток к их сопротивлению (L/R) небольшое. И оно тем меньше, чем меньше мощность устройства. Поэтому во время запуска образующийся свободный ток быстро затухает, и им можно пренебречь. Брать в учет будет только ту силу тока, которая установилась в результате переходного процесса.
Ниже на рисунке (а) представлена схема магнитного пускателя, обозначенного буковой К. Технически это электромагнитный выключатель, часто применяемый при запуске электродвигателей с короткозамкнутым ротором. Он необходим для автоматического разгона по естественной механической характеристике (обозначим М) от начала запуска (точка П) до момента, когда М станет равным моменту сопротивления (Мс).

На картинке (б) представлен график зависимости пускового тока от начального момента. Исходя из него, ускорение разгона равно разности абсцисс графиков М и М(с). В таком случае, если Мпуск будет меньше Мс, то разогнаться у электродвигателя не получится. Чтобы получить оптимальное для разгона значение Мпуск для мотора с короткозамкнутым ротором используйте формулу (коэффициент скольжения s равен единице):

Отношение Мпуск к номинальному (Мном) – это величина, определяемая как кратность начального момента. Обозначается kпм. Коэффициент для двигателей с короткозамкнутым ротором входит в диапазон от 1 до 1,8 и устанавливается ГОСТом.
Пример. Если kпм=1,4, а Мном=5000 Н*м, то прямой запуск должен начинаться с Мп = 7000 Н*м.
Внимание! Нельзя превышать установленные ГОСТом нормы. Это ведет к повышению активного сопротивления на вращающемся элементе мотора.
Прямой запуск двигателя обладает преимуществами:
Недостатки метода:

Даже с перечисленными недостатками прямой запуск остается наиболее предпочтительным для асинхронных электродвигателей с короткозамкнутым ротором, т.к. обеспечивает высокие энергетические показатели.
Подходит для запуска электродвигателя высокой мощности, но так же оптимален для аналогов средней, если напряжение в рабочей сети не позволяем разогнать мотор с помощью прямого пуска.
Для понижения напряжения существует три способа:

Главное преимущество – возможность разгона двигателя почти при том же напряжении, которое необходимо для нормальной работы. К недостаткам относится лишь падение Мп и Ммакс (максимальный момент). Эти величины прямо пропорционально зависят от напряжения: чем меньше Вольт, тем меньше моменты. Поэтому с нагрузкой мотор не запустится.
Метод подходит для включения в работы моторов с фазным ротором. Если роторная цепь включает в себя реостат, то активное сопротивление повышается. При этом точка К на рисунке а ниже перемещается ближе к О и обозначается К`. Это не приводит к уменьшению Ммакс, зато обеспечивает повышение Мпуск. Вместе с этим критическое скольжение увеличивается, и зависимость момента от s смещается к зоне больших скольжений. Число же оборотов смещается в зону меньших вращательных частот (рисунки б и в).

Обычно реостат, используемый для пуска мотора, имеет от 3 до 6 ступеней (смотрите рисунок а ниже). Пусковое сопротивление плавно уменьшается, что обеспечивается большой Мпуск. Изначально мотор приводится в ход по четвертой характеристике, проиллюстрированной на рисунке б. Она соответствует сопротивлению запускающего реостата и обеспечивает максимальную пусковую мощность.

Вращающий момент (Мвр) уменьшается с ростом оборотов. При некотором минимальном значении необходимо отключить часть реостата, чтобы Мвр возрос снова до максимального (смотрите третью характеристику). Но обороты растут, поэтому Мвр снова уменьшается. Тогда отключается еще одна часть реостата, и начинается работа по второй характеристике. Когда реостат двигателя с фазным ротором отключают вовсе, пусковой процесс завершается. Мотор продолжает работу по характеристике 1.
Запуск в ход таким методом характеризуется изменением Мвр от максимального до минимального значения. Сопротивление в данном случае уменьшается ступенчато по ломаной кривой линии (выделена жирным на графике). Выключение частей реостата осуществляется автоматически или вручную.
Преимущество запуска электродвигателя с фазным ротором с использованием реостата заключается в возможности включать его при Мпуск, близком к Ммакс. Пусковые токи при этом минимальны. Изменение силы тока проиллюстрировано на рисунке в.
Недостатков хватает. Во-первых, это сложность включения. Во-вторых, это необходимость использования совсем не дешевых моторов с фазным ротором. Характер работы хуже, чем у аналогов с короткозамкнутым ротором при мощности одинакового значения – это третий минус. Это объясняет, почему электродвигатели с фазным ротором используют преимущественно в случае возникновения сложностей с запуском других двигателей.
Для включения в работу асинхронного двигателя с питанием от однофазной сети используют вспомогательную намотку. Она должна лежать перпендикулярно относительно рабочей статорной намотки. Но для создания вращающегося магнитного поля необходимо соблюдение еще одного условия. Это сдвиг по фазе тока, протекающего по вспомогательной намотке, относительного тока, возникающего в рабочей обмотке.
Для обеспечения сдвига фаз в момент подключения к однофазной сети в электроцепь вспомогательной обмотки включают специальный элемент. Это может быть резистор, конденсатор или дроссель. Но распространенными элементами являются только первые два.
После разгона мотора до значения частоты, равной установившейся, дополнительную намотку выключают. Это можно сделать вручную или автоматически. В начале двигатель работает по двухфазной, а после установления частоты – по однофазной характеристике.
Метод применим для асинхронных двигателей, подключаемых к однофазной сети, и имеющих первичную дополнительную обмотку с короткозамкнутым ротором. Так называют мотор с расщепленной фазой, электроцепь которого имеет высокое активное сопротивление.
Чтобы пустить в ход двигатель, питаемый от однофазной сети, необходим пусковой резистор, соединяемый последовательно с дополнительной намоткой. Тогда сдвиг фаз составляет 30 градусов. Этого хватает для разгона. Ниже представлена схема, согласно которой достигается омический сдвиг фаз.

Вместо резистора можно применить дополнительную обмотку высокого сопротивления, но низкой индуктивности. В этом случае намотка имеет мало витков, которые выполняются из провода меньшего сечения в отличие от того, что используется для рабочей намотки.

В России с конвейера выходят моторы, подключаемые к однофазной сети, оснащенные резистором для сдвига фаз. Их мощность варьируется в диапазоне 18-600 Вт. Двигатели рассчитаны для сетей с напряжением 127, 220 или 380 Вольт и переменным током с частотой 50 Гц.
Метод отличается от предыдущего тем, что мотор с расщепленной фазой при подключении к однофазной линии, имеет высокое сопротивление только в момент запуска.

Для обеспечения наибольшего значения Мпуск необходимо круговое и вращающееся магнитное поле. Для этого токи в рабочей и дополнительной обмотках смещают на 90 градусов. Такое смещение может обеспечить только конденсатор. Его использование помогает достичь хорошей пусковой характеристики асинхронного двигателя, питающегося от однофазной электросети.
Выбор способа пуска асинхронного электродвигателя зависит от того, к какой сети он включается: к однофазной или трехфазной. Влияет также мощность мотора и его конструкция.
electricdoma.ru
Момент начала питания электродвигателя напряжением сети сопровождается высоким пусковым током. Поэтому, если участок линии электропередачи относительно слаб, фиксируется снижение напряжения, что оказывает влияние на работу рецептора. Падение напряжения может достигать значительных величин, что также сказывается на функциональности систем освещения. Исключить подобные явления призваны отраслевые правила, которыми запрещается пуск электродвигателей в режиме непосредственного старта, если оборудование выходит за пределы заданной мощности. Следует применять такие пусковые режимы электродвигателей, при которых питающая сеть и периферийное оборудование не испытывают дестабилизации в работе.
Содержимое публикации
Существуют и применяются на практике несколько разных режимов пуска асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
 Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент старта
Схема прямого запуска: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент стартаКогда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора, образованной короткозамкнутым ротором, имеющей крайне малое сопротивление.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО.
Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
 Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — мотор
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — моторНапример, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда».
Принцип режима пуска асинхронного электродвигателя, для этого варианта заключается в запуске мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению.
Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В.
В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз.
Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости.
Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики. Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером.
Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника».
В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.
Режим пуска «звезда – треугольник» подходит для машин с низким резистивным крутящим моментом или когда запуск выполняется без нагрузки.
Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Применение такой задержки по времени способствует ослаблению противоэлектродвижущей силы. Следовательно, уменьшается пиковая составляющая переходного тока.
Однако задержка рекомендуется только в том случае, когда машина имеет достаточную инерцию. Иначе время задержки значительного снижает скорость вращения.
Также применим другой вариант – трёхступенчатый, где выполняется последовательность:
Разрыв по-прежнему имеет место, но резистор, включенный последовательно с обмотками подключенными «треугольником» в течение примерно трех секунд понижает переходный ток. Так предотвращается нарушение течения тока и образование переходных негативных явлений.
Подобный вариант режима пуска асинхронного электродвигателя — редкость для России и Европы. Эта схема распространена на североамериканском континенте (для моторов напряжением 230/460В).
 Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмотки
Схема старта путём питания части обмотки статора: 1 — контактор 1; 2 — контактор 2; 3 — мотор; 4 — одна половина обмотки; 5 — вторая половина обмоткиТакие двигатели имеют обмотку статора, разделенную на две параллельные обмотки, с выводом шести или двенадцати концевых проводников. Этот вариант, по сути, эквивалентен двум «половинным моторам» равной мощности.
В режиме запуска один «половинный двигатель» подключается непосредственно к полному напряжению сети. Пусковой ток и крутящий момент делятся примерно на два.
Крутящий момент, однако, существенно больше, чем для электродвигателя с короткозамкнутым ротором равной мощности в режиме пуска «звезда-треугольник».
Конечным этапом режима пуска становится подключение к сети второй обмотки. В этот момент, текущий пиковый ток отмечается низким уровнем и протекает кратковременно, потому что электродвигатель не отключается от сети и уже частично раскручен.
Применение резистивно-статорного режима пуска электродвигателя отмечается пониженным напряжением. Причина понижения — резисторы, включенные последовательно с обмотками статора.
Когда скорость вращения ротора стабилизируется, резисторы отключаются, а статор электродвигателя подключается непосредственно к сети. Как правило, схема выстроена с участием таймера.
Этот режим пуска асинхронных электродвигателей не изменяет соединения статорных обмоток. Поэтому не требуется, чтобы на клеммы колодки БРНО выводились все концевые проводники обмотки.
 Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый мотор
Резистивный вариант старта мотора: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — тепловая защита; 5 — запускаемый моторЗначение сопротивления рассчитывается в соответствии с максимальным пиковым током при пуске или минимальным пусковым моментом, необходимым для крутящего момента привода машины. Значения пускового тока и крутящего момента следующие:
ПТ = 4.5 НТ
ПМ = 0,75 НПМ
На этапе ускорения с резисторами, приложенное на клеммах электродвигателя напряжение не является полным, а равно разнице, полученной от величины напряжения сети, минус падение напряжения на сопротивлении.
Падение напряжения пропорционально току потребления электродвигателя. Поскольку ток снижается по мере ускорения вращения ротора мотора, то же самое происходит и при падении напряжения на сопротивлении.
Поэтому напряжение, приложенное на клеммы асинхронного электродвигателя, находится на самом низком уровне при запуске, а затем постепенно увеличивается.
Поскольку крутящий момент пропорционален квадрату напряжения на клеммах мотора, этот момент увеличивается быстрее, чем при пуске в режиме «звезда-треугольник», где напряжение остается постоянным на всём протяжении времени, пока действует подключение «звездой».
Таким образом, резистивно-статорный режим пуска подходит для машин с резистивным крутящим моментом, который увеличивается с набором скорости. Такой пуск оптимален для оборудования, подобного вентиляторам и центробежным насосам.
Однако есть недостаток — довольно высокий пиковый ток на запуске. Снижение тока возможно увеличением сопротивления. Но увеличение значения сопротивления грозит падением напряжения на клеммах электродвигателя и, как следствие, приводит к резкому снижению пускового момента.
Режим автотрансформаторного пуска асинхронного электродвигателя характерен способом питания. На мотор подводится пониженное напряжение, благодаря автотрансформатору.
 Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — мотор
Автотрансформаторная схема: 1 — контактор 1; 2 — тепловая защита; 3 — контактор 2; 4 — контактор 3; 5 — автотрансформатор; 6 — контактор 4; 7 — моторПо завершению процесса старта автотрансформатор отключается. Пуск выполняется в три этапа:
Пусковой процесс проходит без фактора разрыва прохождения тока в обмотках электродвигателя. Поэтому переходные явления по причине разрывов отсутствуют.
Между тем если не соблюдать определённые меры предосторожности, подобные явления переходного процесса могут появляться при подключении полного напряжения.
Этот дефект обусловлен высоким значением индуктивности, включенной последовательно с двигателем, по сравнению с режимом работы мотора на всём протяжении времени подключения «звездой».
Отмечается резкое падение напряжения, чем вызывается высокий рост переходного тока при подключении полного напряжения. Чтобы преодолеть этот недостаток, магнитная цепь автотрансформатора выполняется с воздушным зазором.
Наличие такого зазора способствует снижению значения индуктивности. Это значение рассчитывается для предотвращения изменения напряжения на клеммах электродвигателя, когда осуществляется переход на второй шаг процесса пуска.
Воздушный зазор вызывает увеличение тока намагничивания катушки автотрансформатора. Ток намагничивания увеличивает пусковой ток электросети при включении автотрансформатора.
Автотрансформаторный режим пуска обычно используется при эксплуатации двигателей мощностью более 150 кВт. Подобные схемы считаются экономически невыгодными по причине высокой стоимости автотрансформатора.
Нельзя запускать асинхронный электродвигатель с фазным ротором сразу после короткого замыкания роторных обмоток. Этот метод приводит к появлению предельных пиковых токов.
 Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным ротором
Старт для мотора с фазным ротором: 1 — предохранительный блок; 2 — защита; 3, 7, 8, 9 — контакторы; 4, 5, 6 — ограничительные резисторы: 10 — мотор с фазным роторомНеобходимо использовать резисторы в цепях питания ротора. Замыкать роторные обмотки следует постепенно, по мере набора статором полного сетевого напряжения.
Сопротивление на каждой фазе необходимо рассчитывать с учётом точного определения кривой крутящего момента. В результате расчётное сопротивление полностью включается при запуске и замыкается накоротко только при достижении ротором полной скорости вращения.
Режим пуска электродвигателя с фазным ротором является лучшим выбором для всех случаев, когда пиковые токи машин должны быть низкими, а запуск осуществляется при полной нагрузке.
Такой пуск обладает чрезвычайно плавным ходом, так как достаточно легко регулировать количество и форму кривых, представляющих собой последовательные шаги по механическим и электрическим требованиям (резистивный крутящий момент, значение ускорения, максимальный пик тока и т. д.).
Один из эффективных стартовых режимов, подходящих для плавного пуска и останова электродвигателя. Применяется с целью ограничение тока, регулировки крутящего момента.
Контроль по ограничению тока устанавливается на максимум (кратность 3-4 от номинала) при пуске, чем снижается характеристика крутящего момента. Этот способ удачно подходит для центробежных насосов, вентиляторов и т.п.
Регулирование с помощью настройки крутящего момента оптимизирует крутящие моменты в процессе пуска и снижает пусковой ток.
 Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторов
Схемный вариант разводки для обеспечения старта при условии каскадного объединения электрических моторовТакой режим оптимально подходит для машин с постоянным крутящим моментом. Этим режимом поддерживается много разных вариаций:
Современная эффективная пусковая система, применимая для использования, когда необходимо контролировать и настраивать в широком диапазоне скорость вращения вала мотора. Поддерживаются условия:
Этот режим пуска асинхронных электродвигателей допустимо использовать на всех типах электрических машин. Однако подобные решения в основном используются для регулировки скорости вала электродвигателя, начиная с пусков второстепенного назначения.
При помощи материалов: Schneider-electric
zetsila.ru
При применении асинхронных короткозамкнутых электродвигателей, очень остро встает вопрос ограничения пусковых токов. Для ограничения пусковых токов применяются различные схемы пуска асинхронного двигателя.
Пусковой ток
При подаче на электродвигатель напряжения, в цепи статора двигателя возникают скачки тока, именуемые пусковым током или током заторможенного ротора. Пусковой ток при пуске трехфазного асинхронного двигателя может превышать в 5 – 7 раз выше номинального, хотя действует кратковременно. После окончания пуска двигателя, и выхода двигателя на номинальные обороты, ток падает до номинального, как показано на рис.

В каждом отдельном случае необходимо принимать меры, для снижения пусковых токов, используя различные способы пуска. Кроме этого необходимо принять специальные меры для стабилизации питающего напряжения.
Пусковые периоды
Рассматривая различные способы пуска трехфазного асинхронного двигателя, которые снизить пусковой ток, нужно следить за тем, чтобы период пуска не был слишком долгим. Потому что продолжительное время пуска двигателя может вызвать перегрев обмоток.
Способы пуска трехфазного асинхронного двигателя
Следует знать основные достоинства и недостатки различных способов пуска трехфазного асинхронного двигателя. В данной таблице представлены сравнительные характеристики часто используемых способов пуска.

Прямой пуск
Что такое прямой пуск? Как следует из названия, прямой пуск трехфазного асинхронного двигателя означает, что электродвигатель подключается к сети на номинальное напряжение. Прямой пуск в англоязычной аббревиатуре обозначается как (direct-on-line starting – DOL). Его обычно применяют при стабильном питании двигателя, если вал двигателя жестко привязан к приводу, например привод вентилятора или насоса.
Преимущества
Прямой пуск трехфазного асинхронного двигателя от сети (DOL), на сегодняшний день является самым дешёвым и простым. Поэтому он получил и самое большое распространение в промышленности. Кроме того, он даёт минимальное увеличение температуры электродвигателя при пуске по сравнению со всеми другими способами пуска. Если величина пускового тока не ограничивается специальными нормами, то такой способ является наиболее предпочтительным, но не самым экономичным. Если величина пускового тока ограничена параметрами сети, то необходимо выбирать другие способы пуска. Простейшая схема управления трехфазным асинхронным двигателем M включает в себя силовой контактор KM, устройство зашиты от перегрузок QF тепловое реле KT и кнопки управления SB1, SB2.


Недостатки
В схемах прямого пуска асинхронных двигателей пусковой момент составляет 150% -300% номинального, при этом пусковой ток может достигать 300% — 800% тока номинального.
eprivod.com
В момент пуска частота вращения ротора двигателя равна нулю, а вращающееся поле мгновенно приобретает синхронную частоту вращения по отношению к ротору, в результате в обмотке ротора наводится большая ЭДС. При этом токи ротора и статора в несколько раз превосходят минимальные их значения, так как они увеличиваются с увеличением скольжения ротора, т.е. с уменьшением его частоты вращения (рис. 10).
Пусковой ток асинхронных двигателей с короткозамкнутым ротором в 5 –10 раз превышает номинальный (пусковой момент составляет 1,1 ‑ 1,8 от номинального значения момента). Так как этот ток протекает по обмотке электродвигателя кратковременно и только в процессе запуска, то, если пуски двигателя не очень часты, он не вызывает перегрева электродвигателя. Поэтому пуск асинхронных электродвигателей небольшой мощности, как правило, производится простым включением в сеть. Однако большой пусковой ток крупных электродвигателей для питающих их электрических сетей вызывает резкие и значительные (особенно в маломощных сетях) скачки напряжения, что неблагоприятно сказывается на других, включенных в эту же сеть потребителях электроэнергии.

Рис. 10
Как видно из рис. 10, пусковой момент асинхронного двигателя заметно меньше максимального, и при нагрузке на валу ротора, превышающейМп, двигатель не запустится. При этом, если статор не отключить от сети, большой пусковой ток приведет к перегреву обмоток и выходу из строя двигателя.Для предупреждения описанных неблагоприятных ситуаций, необходимо ограничение пускового тока асинхронных двигателей при подаче на них питающего напряжения или повышение пускового момента.
Снижение напряжения на обмотках асинхронного электродвигателя при пуске достигается различными способами:
пуском с использованием автотрансформатора или индукционного регулятора;
пуском с переключением обмотки статора со звезды на треугольник;
пуском с включением добавочного сопротивления в обмотку статора двигателя.
Однако при снижении пускового напряжения пусковой момент асинхронного двигателя также падает, ибо он пропорционален квадрату пускового напряжения. Поэтому означенные способы пуска могут быть применимы в основном для приводных двигателей механизмов, не требующих при запуске больших пусковых моментов (например, запуск двигателя вентилятора, ненагруженного двигателя, двигателя на холостом ходу и др.).
Асинхронный электродвигатель с фазным ротором пускают в ход с помощью пускового реостата с максимальным сопротивлением Rдоб, включаемого последовательно с обмоткой ротора (см. рис. 3). При этом критическое скольжениеsк= (R'2+Rдоб)/(Х1+Х'2) увеличивается, а величина критического моментаМк = 3pU12/21(X1+X'2) не меняется. Искусственные характеристики момент-скольжение с добавочным сопротивлением приведены на рис. 11. ВеличинаRдобподбирается такой, чтобы критическое скольжение было равным единице, тогда пусковой момент вырастет до критического значения. УвеличениеМпроисходит за счет увеличения активной составляющей тока. Действующее значение пускового тока при этом уменьшается.

Рис. 11
В начальный момент пусковое активное сопротивление реостата вводится в цепь двигателя полностью(Rдоб).С увеличением оборотов частота вращения магнитного поля по отношению к ротору уменьшается. Соответственно уменьшаются ЭДС и ток ротора. Поэтому с увеличением частоты вращения двигателя можно постепенно уменьшать значение пускового сопротивления в цепи обмотки ротора (R'доб), не опасаясь того, что ток двигателя возрастет до значений, опасных для него. При полностью выведенном сопротивлении пускового реостата(R''доб = 0) пуск двигателя заканчивается. Такой способ позволяет обеспечить необходимый для пуска пусковой момент двигателя.
studfiles.net
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.
Прямой пуск. Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
 , (3.37)
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI= IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1:
.(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами. Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами. Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части. Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой. В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.


Рис.3.25
Рис.3.26
Двигатели с двойной клеткой. В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников. Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой. Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду. Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного. В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник. Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.

Рис.3.27
Пуск при включении добавочных резисторов в цепь статора. (рис. 3.28). Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого. Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.


Рис.3.29 Рис.3.28
Автотрансформаторный пуск. Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29. Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n2раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
 Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда  .
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
electrono.ru
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.
Прямой пуск.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
 , (3.37)
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Рис. 3.22
Значение пускового момента находится из (3.23) при s = 1: 
.(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться. С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами.
Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ). По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Рис.3.23 Рис. 3.24
Двигатели с глубокими пазами.
Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части. Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой. В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.


Рис.3.25
Рис.3.26
Двигатели с двойной клеткой.
В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников. Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой. Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду. Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного. В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник. Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.

Рис.3.27
Пуск при включении добавочных резисторов в цепь статора.
(рис. 3.28). Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБможно ограничить пусковой ток до допустимого. Следует иметь в виду, что момент при пуске, пропорциональный U21П, будет меньше и составляет (U1П / U1НОМ)2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI21n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.


Рис.3.29 Рис.3.28
Автотрансформаторный пуск.
Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29. Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет вn раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет вn2 раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
 Приведенное к обмотке статора сопротивление пускового реостата Rpрассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
Приведенное к обмотке статора сопротивление пускового реостата Rpрассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда  .
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец. 
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.
studfiles.net