• Электромагнитный момент и рабочие характеристики асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2 всегда меньше мощности на входе (потребляемой мощности) Р1 на величину потерь  Р :
Р :
Р2 = Р1 -  Р (13.1)
Р (13.1)
Потери  Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f = f1), а частота перемагничивания сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном скольжении sном = 1 ÷ 8 % частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1 ; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (13.3)
Здесь r1 и r2 — активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб - 20)]; r2 = r2.20 [1 + α (Θра6 - 20)], (13.4)
где r1.20 и r2.20 — активные сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм (13.5)
где Рэм — электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В - переходное падение напряжения на пару щеток.
Механические потери Рмех — это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2 (13-8)
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
 P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 =m1U1I1cosφ1затрачивается в статоре на магнитные Рыи электрические Рэ1потери. Оставшаяся после этого электромагнитная мощность Рэм[см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмехи добавочных потерь Рдоб, а оставшаяся часть этой мощностиР2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 -  P. (13.10)
P. (13.10)
Электрические потери в обмотках РЭ1 и РЭ2 являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рм и механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1 + Рэ2 + Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном = 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.

Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos φ1 = 0,87. Частота ηвращения nном = 1470 об/мин. Требуется определилить КПД двигателя ηhоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Θра6 =115 °С).
Решение. Ток в фазе обмотки статора
I1ном = =
= =16,8 А
=16,8 А
где U1 = 660/  = 380 В.
= 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
Θраб = 115 ˚С, по (13.4)
r1 = r1.20 [1 + α (Θраб - 20)] = 0,8[1 + 0,004(115 - 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 • 16,82 • 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 - (Рм + Рэ1) = 16,7 • 103 - (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 – nном)/ n1 = (1500 - 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 • 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 • 16,7 • 103 =83 Вт.
Суммарные потери по (13.9)
 Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 -  Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Р/ Р1 = 1 - 1712/ (16,7 • 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
studfiles.net
11.Энергетическая диаграмма и КПД АД
В электрическом двигателе при преобразовании одного вида энергии в другой часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери.
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 - мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.

Потери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I12 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 - n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Рмх = Рэм - Pоб2
Мощность на валу двигателя:
Р2 = Рмх - pмх,
где Рмх - мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0M, Рмх = ωM,
где ω0 и ω - синхронная скорость и скорость вращения ротора двигателя; М - момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:

или Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения Pоб2 = m2х r2х I2^2.
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η=P2 /P1 = (P1 - (Pоб -Pс -Pмх -Pд)) /P1,
где Роб =Pоб1 + Роб2 - суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η=f(Р/Рном), где Р/Рном - относительная мощность

Асинхронный электродвигатель конструируется так, чтобы максимум ее коэффициента полезного действия ηmaxимел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 - 90%, а для мощных двигателей 90-96%.
studfiles.net
Зависимости момента М,потребляемой мощностиP1, коэффициента мощности cos, коэффициента полезного действия (КПД), обычно обозначаемого символом , скольжения ротораsи тока статора от полезной мощности, т.е. мощности на валу двигателяР2,называются рабочими характеристиками асинхронного электродвигателя. На рис. 9 показано поведение рабочих характеристик.
Зависимость М(Р2) определяется формулой
М = 9,55Р2/n2,
из которой следует, что полезный момент на валу двигателя Мс увеличением полезной мощности Р2возрастает несколько быстрее, чем Р2, так как частота вращения ротора двигателяn2при этом уменьшается.

Рис. 9
Характер зависимостиcos (Р2),т.е. зависимости коэффициента мощности асинхронного двигателя от мощности на валу, определяется выражением cos =Р1/3U1I1.В связи с тем, что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания вращающего магнитного поля, коэффициент мощности асинхронных двигателей всегда меньше единицы. Значение cosдля нормальных асинхронных двигателей средней мощности при номинальной нагрузке составляет 0,83–0,89. С уменьшением нагрузки на валу двигателя коэффициент мощности снижается и доходит до значений 0,2–0,3 при холостом ходе. В этом режиме полезная мощность на валу равна нулю, однако, при этом двигатель потребляет активную мощность из сети, расходуемую на магнитные потери, поэтому коэффициент мощности здесь не равен нулю. С увеличением нагрузки сверх нормативной наблюдается некоторое снижение значения коэффициента мощности за счет увеличения индуктивной составляющей сопротивления обмотки статора асинхронного двигателя. Характер изменения коэффициента мощности от нагрузки асинхронного двигателя имеет примерно такой же вид и изменяется по тем же причинам, что и у трансформатора.
Зависимость КПД асинхронного двигателя от нагрузки (Р2) определяется формулой
= Р2 /Р1 = Р2 / (Р2+Р
где Р1 —активная мощность, потребляемая двигателем от питающей сети;Р—суммарные потери мощности в двигателе, равные сумме потерь мощности в магнитопроводе, электрических потерь мощности в обмотках статора, электрических потерь мощности в обмотках ротора, механических потерь и добавочных потерь мощности. При отсутствии нагрузкиР2 = 0, поэтому КПД электродвигателя при этом также равен нулю.
С увеличением нагрузки КПД двигателя растет и принимает наибольшее значение при условии, что постоянные потери мощности в электродвигателе (РС1+РС2+Рмех) оказываются равными переменным потерям мощности (РЭ1+РЭ2) в нем. При дальнейшем росте нагрузки КПД электродвигателя, так же как и трансформатора, снижается из-за сильного роста электрических потерь. Ток статора при отсутствии нагрузки равен току холостого хода (I1=I0). При увеличении мощности на валу электродвигателя возрастает и токI1, потребляемый двигателем из питающей сети. Увеличение тока происходит приблизительно по линейному закону. Однако при значительном возрастании мощности на валу линейность нарушается и ток начинает возрастать более интенсивно, чем мощность, так как коэффициент мощности двигателя при этом снижается, а электрические потери мощности в обмотках двигателя при больших нагрузках значительно возрастают. Снижение cos и увеличение потерь мощности в двигателе компенсируются увеличением тока вследствие возрастания мощности. Этим же объясняется и характер изменения потребляемой из сети мощностиР1(Р2).
С увеличением мощности на валу, т.е. с увеличением нагрузки двигателя, вызываемой возрастанием момента сопротивления исполнительного механизма, частота вращения ротора уменьшается, а его скольжение при этом возрастает, вызывая увеличение ЭДС Е2в обмотках ротора, а следовательно, возрастание токов ротора и статора. При неизменном магнитном потоке двигателя это приводит к увеличению момента, развиваемого двигателем. Таким образом, с увеличением нагрузки на валу равновесие между моментом, развиваемым двигателем, и моментом сопротивления наступает при снижении частоты вращения. При возрастании мощности на валу асинхронного двигателя происходит снижение частоты вращения ротора.
studfiles.net
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 - мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.
Рис. 1. Энергетическая диаграмма двигателяПотери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I12 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 - n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Рмх = Рэм - Pоб2
Мощность на валу двигателя:
Р2 = Рмх - pмх,
где pмх - мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0M, Рмх = ωM,
где ω0 и ω - синхронная скорость и скорость вращения ротора двигателя; М - момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:
или Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения Pоб2 = m2х r2х I22.
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 - (Pоб - Pс - Pмх - Pд)) / P1,
где Роб =Pоб1 + Роб2 - суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f(Р/Рном), где Р/Рном - относительная мощность.
ukrelektrik.com
Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии. Эти потери делятся на механические, магнитные и электрические.
Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на покрытие магнитных потерь в сердечнике статора рс1, а также в обмотке статора на покрытие электрических потерь, обусловленных нагревом обмотки,
рэ1 = m1I12r1. 
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью
Рэм = Р1 - (рc1 + рэ1).
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора
рэ2 = m2I22r2 = m1I’22r’2.
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
Р’2 = Рэм - рэ2.
Таким образом, полная механическая мощность
Р’2 = m1I’22r’2[(1-s)/s] = рэ2[(1-s)/s].
Выполнив несложные преобразования, получим
рэ2[(1-s)/s] = Рэм - рэ2 и
рэ2= sРэм,
т.е. мощность электрических потерь в роторе пропорциональна скольжению. Поэтому работа асинхронного двигателя более экономична при малых скольжениях.
Следует отметить, что в роторе двигателя возникают также и магнитные потери, но ввиду небольшой частоты тока ротора (f2 = f1s) эти потери настолько малы, что ими обычно пренебрегают.
Механическая мощность на валу двигателя Р2 меньше полной механической мощности Р’2 на величину механических рмех и добавочных рд потерь
Р2 = Р’2 - (рмех + рд).
Механические потери в асинхронном двигателе обусловлены трением в подшипниках и трением вращающихся частей о воздух. Добавочные потери вызваны наличием в двигателе полей рассеяния и пульсацией поля в зубцах ротора и статора.
Таким образом, полезная мощность асинхронного двигателя
Р2 = Р1 - ∑р,
где ∑р – сумма потерь в асинхронном двигателе, ∑р = рс1 + рэ1 + рэ2+ рмех + рд.
Коэффициент полезного действия асинхронного двигателя
η = Р2/ Р1 = 1 - ∑р/ Р1.
Благодаря отсутствию коллектора КПД асинхронных двигателей выше, чем у двигателей постоянного тока. В зависимости от величины мощности асинхронных двигателей их КПД при номинальной нагрузке может быть в пределах от 83 до 95% (верхний предел соответствует двигателям большой мощности).
china.msk.ru
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;

По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.

Мощность, потребляемая из сети можно определить из формулы:

Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:

Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
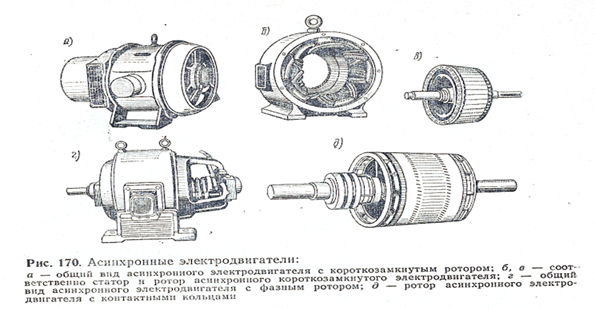
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.

Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:

P2н- номинальная мощность , кВт,N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя

Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:N – двигатели с нормальный моментом;Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле

где Р-номинальная мощность двигателя, кВт;р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
eprivod.com
При рассмотрении способов регулирования скорости на рис. 10-29 была приведена энергетическая диаграмма асинхронного двигателя. Подводимая к двигателю мощность
P1 = √3 U1I1cos φ1.
Если из Р1 вычесть все потери в двигателе, то полезная мощность на валу
P2 = P1 — (P01 + Pст1 + Р02 + Рмех),

где Р01 — потери в обмотке статора;
Рст1 — потери в стали статора; Р02 — потери в обмотке ротора; Рмех — потери на трение. Потерями в стали ротора можно пренебречь, так как частота f2 близка к нулю.
Рис. 10-37. Рабочие, характеристики асинхронного двигателя.
Рабочие характеристики асинхронного двигателя, приведенные на рис. 10-37, сходны с характеристиками двигателя постоянного тока параллельного возбуждения. Электрические машины строятся так, что максимум к. п. д. наступает при номинальной нагрузке или близкой к ней.
Все установки, использующие электрическую энергию переменного тока, должны, по возможности, работать при cos φ, близком к единице. На рис; 10-38 показана однолинейная схема электропередачи энергии от пункта питания 1 к асинхронным двигателям 3 через трансформатор 2.

Рис. 10-38. Схема улучшения cos φ в сети.
Известно, что в проводах электропередачи 4 протекает ток I = √(I2a + I2р), показанный на рис. 10-39. Слагающая тока Iа пропорциональна активной мощности Р, а реактивная слагающая Iр необходима для поддержания электромагнитных полей трансформатора и двигателей. Ток Iр совершенно необходимей остается практически неизменным независимо от того, какая активная мощность Р передается по проводам. Если эта мощность, а следовательно, и ток Iа велики, то угол φх мал, a cos φ2 велик и использование электропередачи хорошее. Когда двигатели недогружены, Iасильно уменьшен и падает почти до величины Iа х, угол φ возрастает, a cos φ становится близким к cos φх. Ток холостого хода Iх ≈ Iр достигает 10% Iн в трансформаторах и 40% Iн в асинхронных двигателях, поэтому использование передачи будет плохим. Таким образом, полная нагрузка асинхронных двигателей является необходимым условием их эксплуатации.

Рис. 10-39. Векторная диаграмма улучшения cos φ в сети.
Иногда при тяжелых пусках асинхронный двигатель приходится выбирать завышенной мощности и он работаете не догрузкой. Тогда, еслиР2 ≤ (40—45)% Р2н и статор нормально соединен в треугольник, его возможно пересоединить в звезду. Активная мощность, а значит и активный ток остаются неизменными, а реактивный ток уменьшается примерно в 3 раза и cos φ возрастает.
Ранее было указано, что увеличение cos φ возможно путем включения конденсаторов в точке 5 или лучше 6 сети (рис. 10-38). Однако при больших реактивных тока больший эффект дают синхронные компенсаторы.
Статья на тему КПД асинхронного двигателя
znaesh-kak.com