Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
 Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.

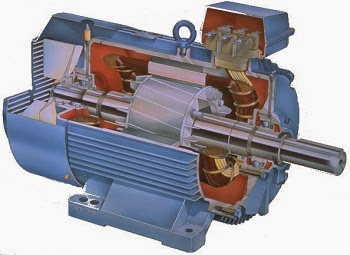
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
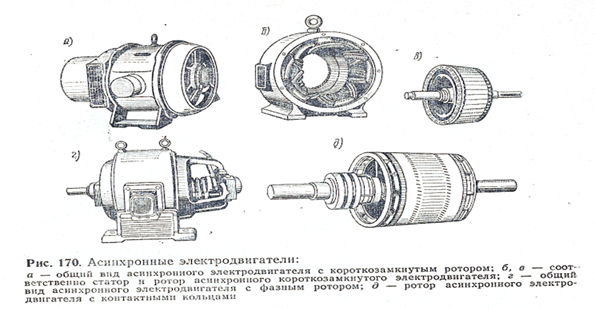
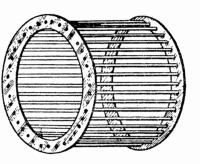
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.

Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
 Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
 Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Электродвигатели переменного тока бывают трех и однофазные.Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток. 
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
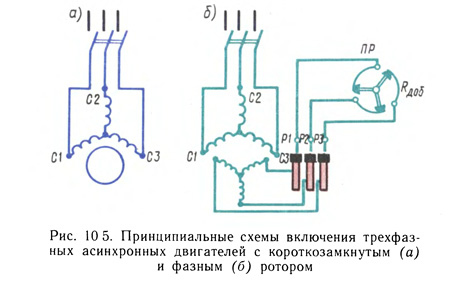 Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
zewerok.ru
| Асинхронные эл. двигатели самые распространенные эл. двигатели во всем мире. Простота их конструкции, и низкая стоимость вполне может характеризовать «коротыши» самым положительным образом. Принцип действия этих двигателей можно рассматривать только в контексте с их конструкцией, поэтому давайте рассмотрим основные узлы и, естественно, соответствующую терминологию. Асинхронные электрические двигатели переменного тока с короткозамкнутым ротором состоят из двух основных узлов: статора и ротора. Ротор это та часть двигателя, которая вращается внутри статора. С конструктивной точки зрения ротор – тело вращения, что означает симметрию относительно оси вращения. Ротор, в принципе , очень прост и вполне надежен. Выглядит он как обычная цилиндрическая болванка с торчащими концами вала, но это только кажется, что ротор прост. Изготавливается он из разных материалов и с довольно точными размерами. В роторе имеется обмотка, но увидеть её не представляется возможным так, как обмотка эта выполняется довольно необычным образом. Обмотку заливают в пазы ротора расплавленным алюминием. Иногда её выполняют из медных стержней, которые забивают в пазы и приваривают по обоим концам к медным кольцам. В результате, получается, что обмотка в роторе короткозамкнутая и выглядит она как «беличья клетка». Такие обмотки довольно массивные и поэтому механически прочные. Если эл. двигатель будет работать в штатном режиме или при кратковременных перегрузках, то такая обмотка практически вечная. Отсюда и высокая надёжность всего асинхронного эл. двигателя с к.з. ротором. Теперь посмотрим на сердечник ротора. Он изготавливается не из однородного куска металла, а набирается из отдельных пластин из специальной электротехнической стали. Толщина каждого листа может быть от 0,25 до 0,5 мм. Каждая пластина в сердечнике ротора изготавливается штамповкой. Пластины имеют форму круга. По внешнему радиусу вырубаются пазы определённой формы. Сердечник ротора получается не однородным. Но зачем такая сложность в изготовлении? Понятное дело, шихтовать сердечник из отдельных пластин приходится не для забавы. Дело в том, что при переменном токе магнитный поток, который проходит по сердечнику тоже переменный. При этом в каждой пластине наводятся вихревые токи, которые выделяются в виде тепла. Вихревые токи паразитные так, как нагрев сердечника, собственно, нам не нужен. Задача любого эл. двигателя - преобразовывать электрическую энергию в механическую. Нагрев - это потери эл. энергии и снижение КПД машины. Как показывает практика, чем толще пластины, тем выше потери. Причём, толщина пропорциональна квадрату потерь. Если выполнить сердечник из цельного металла, то двигатель превратится в печку. С другой стороны, уменьшать толщину отдельных пластин тоже нельзя до бесконечности так, как требуется механическая прочность. При вращении 3000 об/мин возникает достаточно высокая нагрузка, и сердечник может, просто, разорвать центробежной силой. В отличии от ротора, статор неподвижная часть эл. двигателя. Однако сердечник статора тоже выполняется из отдельных штампованных пластин. Пластина статора напоминает больше кольцо с пазами по внутреннему радиусу. В пазы укладывается обмотка, которая подключается к сети переменного тока. Статор и ротор - основные и обязательные составляющие асинхронного эл. двигателя, но, конечно, в двигателе обязательно присутствуют и подшипниковые узлы. В разных исполнениях в конструкцию эл. двигателя может входить ещё многие детали, такие как барно, вентилятор принудительной вентиляции с кожухом или без и т. д., тем не менее, принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором от таких особенностей не зависит. Принцип действия «коротышей» определяет статор с обмоткой и ротор, тоже с обмоткой. Если коротко и примитивно объяснять, как работает асинхронный эл. двигатель, то можно обойтись несколькими предложениями. При подаче переменного напряжения на обмотку статора в статоре образуется вращающееся магнитное поле, которое увлекает за собой ротор. Ротор немного отстаёт по скорости вращения от поля сатора, поэтому эти двигатели называются асинхронными. Согласитесь, что такое объяснение не даёт полной картины происходящих процессов в двигателе. Конечно, нас интересует, например, пуск двигателя, холостой ход, рабочий режим, пределы нагрузки. Любое устройство требует к себе более пристального внимания и более глубокого знания частностей, так как возникновение каких-то неполадок (особенно их устранение) может поставить дилетанта в тупик. К тому же, не мешало бы знать самую простую бытовую необходимость: «А правильно ли работает устройство, или его нужно срочно выключить?» Теперь давайте рассмотрим принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором более пристально. В трёхфазной системе питающей сети обмотки статора создают вращающееся магнитное поле. В начальный момент, когда ротор неподвижен, магнитный поток статора пересекает проводники обмотки ротора. Как известно, при пересечении магнитных линий с витком в последнем наводится ЭДС. Так как обмотка ротора замкнута, то в ней возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора. Что дальше? Частота вращения ротора будет возрастать, но не до бесконечности. Предельная частота вращения это частота вращения вращающегося поля статора. Однако ротор не может вращаться синхронно с полем статора, так как при синхронном вращении магнитное поле статора не будет пересекать проводники ротора, а это означает, что ток ротора, в таком случае, будет отсутствовать. Значит, частота вращения ротора, в любом случае, будет несколько меньше частоты вращения поля статора. Эта разница называется скольжением. Если к валу эл. двигателя приложить какую-либо нагрузку (отрицательный момент), то величина скольжения увеличится, и момент двигателя возрастёт. На самом деле, когда никакой нагрузки нет, т.е. в двигатель находится режиме холостого хода, все-таки небольшой тормозной момент существует от трения в подшипниках. Однако, величина скольжения на холостом ходу близка к нулю. Что ж, теперь давайте посмотрим как эл. двигатель будет себя вести в случае увеличения нагрузочного момента. Сначала это будет почти прямая линия. Увеличение нагрузки ведёт к увеличению скольжения и, разумеется, незначительно падает скорость, но стремительно возрастает момент. Но вот беда (и это большой минус асинхронных эл. двигателей) дальше происходит ужасное. Достигнув критической точки, происходит резкое падение частоты вращения ротора до полной остановки, резко увеличивается ток в обмотке статора и ротора. Таким образом, асинхронный эл. двигатель переменного тока с к.з. ротором становится не работоспособным при увеличении нагрузочного момента выше определённой критической точки. Номинальный момент существует только при незначительном уменьшении частоты вращения. Учитывая это обстоятельство, эксплуатировать такие эл. двигатели можно только с точно рассчитанной нагрузкой и загодя подбирать эл. двигатель определённой мощности и с определённой частотой вращения. Малейшая перегрузка недопустима. Механизм может остановиться, как будто эл. двигатель отключили от сети. Есть ещё один минус. Асинхронные эл. двигатели имеют фиксированную частоту вращения, зависящую от частоты питающего переменного напряжения и числа пар полюсов обмотки статора. Плавно регулировать частоту вращения ротора не получается. Если учесть, что в сети переменного напряжения частота равна 50 Гц, то фактически, частота вращения магнитного поля эл. двигателя переменного тока будет зависеть только от количества пар полюсов. Ω=2πf/p =2πn/60 , где Ω - угловая скорость поля статора; f – частота подводимого напряжения; n – частота вращения поля. В результате имеем формулу для расчета синхронной частоты вращения: n=60 f/p=3000/p (при f=50 Гц) из которой видно, что фиксированные синхронные частоты будут: p=1, n=3000 об/мин, p=2, n=1500 об/мин, p=3, n=1000 об/мин, p=4, n=750 об/мин, p=5, n=600 об/мин, и т.д. Наиболее ходовые скорости в промышленности 3000 об/мин, 1500 об/мин, 1000 об/мин, 750 об/мин. Вообще, всегда стараются в механизмах использовать эл. двигатели с большими частотами вращения, т.к. количество пар полюсов достаточно заметно увеличивает габариты и стоимость эл. двигателя. Если сравнить эл. двигатель одной и той же мощности, то с меньшим количеством пар полюсов машина имеет меньшие габарит Очень часто можно встретить эл. двигатели переменного тока с большим количеством выводных концов. Это типичный пример обхода трудностей с регулировкой частоты вращения. Обмотки хитро рассчитываю на две скорости или четыре скорости. Получаются многоскоростные эл. двигатели. Это не очень удобно, но все-таки выход. При подключении разных выводных концов к сети двигатель работает на разных частотах вращения. Асинхронный двигатель - это двигатель переменного тока, который вращается за счет взаимодействия переменного магнитного поля статора и ротора. Название свое он получил из-за того, что никогда не достигает синхронной скорости (3000об/мин - для 2-х полюсного, 1500об/мин - для 4-х полюсного 50герцовой сети)вращающегося магнитного поля, а как бы догоняет его. Асинхронные двигатели могут быть двух типов - с короткозамкнутым ротором (самый распространенный тип двигателей), в котором переменное магнитное поле индуцируется за счет взаимной индукции, и с фазным ротором (используется в основном на кранах), где ток на обмотки подается через специальные кольца. Синхронный двигатель - это двигатель переменного тока, который вращается за счет взаимодействия переменного магнитного поля статора и постоянного ротора (двигатель постоянного тока наоборот). На самом деле это не совсем так, но объяснять очень долго. Синхронный двигатель всегда работает на синхронной скорости. Обычно синхронные двигатели имеют большую мощность (свыше 630кВт), иначе его эксплуатация не выгодна (необходимо специальное выпрямительное устройство или генератор постоянного тока на валу). Есть правда синхронные двигатели на малую мощность до 1кВт(синхронные реактивные двигатели). К преимуществам асинхронных двигателей можно отнести все, кроме малого пускового момента и нелинейности характеристики момент на валу - скорость, малый коэффициент мощности на мощностях ниже номинальной. Преимущество синхронного двигателя - опережающий коэффициент мощности, регулируемый с помощью возбуждения (обмотка ротора). Все остальное - недостатки. Очень трудный пуск (обычно используют асинхронный пуск), а уже потом входят в синхронизм. Очень чувствителен к нагрузкам - если вышел из синхронизма - гасят поле ротора и останавливают. Дорог по стоимости и в эксплуатации. Вращающееся магнитное поле, создаваемое расположенными на статоре обмотками с током, взаимодействует с токами ротора, приводя его во вращение. Наибольшее распространение в настоящее время получил асинхронный двигатель с короткозамкнутым ротором ввиду своей простоты и надежности. В пазах ротора такой машины размещены токонесущие медные или алюминиевые стержни. Концы всех стержней с обоих торцов ротора соединены медными или алюминиевыми же кольцами, которые замыкают стержни накоротко. Отсюда и произошло такое название ротора. В короткозамкнутой обмотке ротора под действием ЭДС, вызываемой вращающимся полем статора, возникают вихревые токи. Взаимодействуя с полем, они вовлекают ротор во вращение со скоростью , принципиально меньшей скорости вращения поля 0. Отсюда название двигателя - асинхронный. называется относительным скольжением. Для двигателей нормального исполнения S=0,02…0,07. Неравенство скоростей магнитного поля и ротора становится очевидным, если учесть, что при вращающееся магнитное поле не будет пересекать токопроводящих стержней ротора и, следовательно, в них не будут наводиться токи, участвующие в создании вращающегося момента. Принципиальное отличие синхронного двигателя от асинхронного заключается в исполнении ротора. Последний у синхронного двигателя представляет собой магнит, выполненный (при относительно небольших мощностях) на базе постоянного магнита или на основе электромагнита. Поскольку разноименные полюсы магнитов притягиваются, то вращающееся магнитное поле статора, которое можно интерпретировать как вращающийся магнит, увлекает за собой магнитный ротор, причем их скорости равны. Это объясняет название двигателя – синхронный. В заключение отметим, что в отличие от асинхронного двигателя, у которого обычно не превышает 0,8…0,85, у синхронного двигателя можно добиться большего значения и сделать даже так, что ток будет опережать напряжение по фазе. В этом случае, подобно конденсаторным батареям, синхронная машина используется для повышения коэффициента мощности.
|
stydopedia.ru
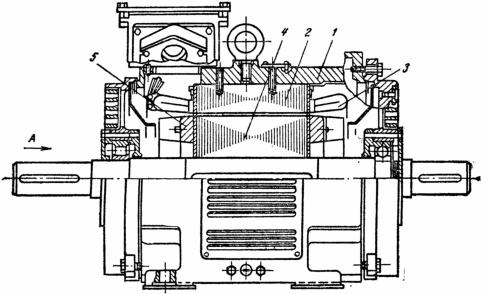
Асинхронные электрические двигатели переменного тока с короткозамкнутым ротором состоят из двух основных узлов: статора и ротора.
Ротор это та часть двигателя, которая вращается внутри статора. С конструктивной точки зрения ротор – тело вращения, что означает симметрию относительно оси вращения. Ротор, в принципе , очень прост и вполне надежен. Выглядит он как обычная цилиндрическая болванка с торчащими концами вала, но это только кажется, что ротор прост. Изготавливается он из разных материалов и с довольно точными размерами.
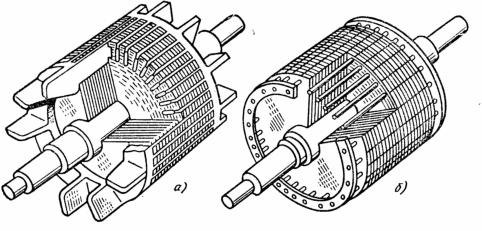 В роторе имеется обмотка, но увидеть её не представляется возможным так, как обмотка эта выполняется довольно необычным образом. Обмотку заливают в пазы ротора расплавленным алюминием. Иногда её выполняют из медных стержней, которые забивают в пазы и приваривают по обоим концам к медным кольцам. В результате, получается, что обмотка в роторе короткозамкнутая и выглядит она как «беличья клетка».
В роторе имеется обмотка, но увидеть её не представляется возможным так, как обмотка эта выполняется довольно необычным образом. Обмотку заливают в пазы ротора расплавленным алюминием. Иногда её выполняют из медных стержней, которые забивают в пазы и приваривают по обоим концам к медным кольцам. В результате, получается, что обмотка в роторе короткозамкнутая и выглядит она как «беличья клетка».
 Такие обмотки довольно массивные и поэтому механически прочные. Если эл. двигатель будет работать в штатном режиме или при кратковременных перегрузках, то такая обмотка практически вечная. Отсюда и высокая надёжность всего асинхронного эл. двигателя с к.з. ротором.
Такие обмотки довольно массивные и поэтому механически прочные. Если эл. двигатель будет работать в штатном режиме или при кратковременных перегрузках, то такая обмотка практически вечная. Отсюда и высокая надёжность всего асинхронного эл. двигателя с к.з. ротором.
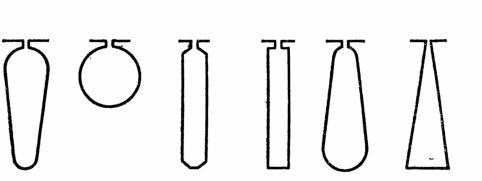 Теперь посмотрим на сердечник ротора. Он изготавливается не из однородного куска металла, а набирается из отдельных пластин из специальной электротехнической стали. Толщина каждого листа может быть от 0,25 до 0,5 мм. Каждая пластина в сердечнике ротора изготавливается штамповкой. Пластины имеют форму круга. По внешнему радиусу вырубаются пазы определённой формы.
Теперь посмотрим на сердечник ротора. Он изготавливается не из однородного куска металла, а набирается из отдельных пластин из специальной электротехнической стали. Толщина каждого листа может быть от 0,25 до 0,5 мм. Каждая пластина в сердечнике ротора изготавливается штамповкой. Пластины имеют форму круга. По внешнему радиусу вырубаются пазы определённой формы.
Сердечник ротора получается не однородным. Но зачем такая сложность в изготовлении? Понятное дело, шихтовать сердечник из отдельных пластин приходится не для забавы. Дело в том, что при переменном токе магнитный поток, который проходит по сердечнику тоже переменный. При этом в каждой пластине наводятся вихревые токи, которые выделяются в виде тепла. Вихревые токи паразитные так, как нагрев сердечника, собственно, нам не нужен. Задача любого эл. двигателя - преобразовывать электрическую энергию в механическую. Нагрев - это потери эл. энергии и снижение КПД машины.
Как показывает практика, чем толще пластины, тем выше потери. Причём, толщина пропорциональна квадрату потерь. Если выполнить сердечник из цельного металла, то двигатель превратится в печку. С другой стороны, уменьшать толщину отдельных пластин тоже нельзя до бесконечности так, как требуется механическая прочность. При вращении 3000 об/мин возникает достаточно высокая нагрузка, и сердечник может, просто, разорвать центробежной силой.
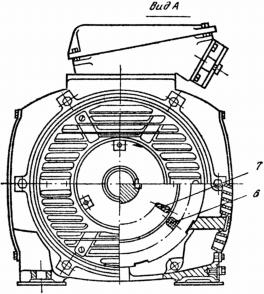 В отличии от ротора, статор неподвижная часть эл. двигателя. Однако сердечник статора тоже выполняется из отдельных штампованных пластин. Пластина статора напоминает больше кольцо с пазами по внутреннему радиусу. В пазы укладывается обмотка, которая подключается к сети переменного тока.
В отличии от ротора, статор неподвижная часть эл. двигателя. Однако сердечник статора тоже выполняется из отдельных штампованных пластин. Пластина статора напоминает больше кольцо с пазами по внутреннему радиусу. В пазы укладывается обмотка, которая подключается к сети переменного тока.
Статор и ротор - основные и обязательные составляющие асинхронного эл. двигателя, но, конечно, в двигателе обязательно присутствуют и подшипниковые узлы. В разных исполнениях в конструкцию эл. двигателя может входить ещё многие детали, такие как барно, вентилятор принудительной вентиляции с кожухом или без и т. д., тем не менее, принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором от таких особенностей не зависит.
Принцип действия «коротышей» определяет статор с обмоткой и ротор, тоже с обмоткой. Если коротко и примитивно объяснять, как работает асинхронный эл. двигатель, то можно обойтись несколькими предложениями. При подаче переменного напряжения на обмотку статора в статоре образуется вращающееся магнитное поле, которое увлекает за собой ротор. Ротор немного отстаёт по скорости вращения от поля статора, поэтому эти двигатели называются асинхронными.
Согласитесь, что такое объяснение не даёт полной картины происходящих процессов в двигателе. Конечно, нас интересует, например, пуск двигателя, холостой ход, рабочий режим, пределы нагрузки. Любое устройство требует к себе более пристального внимания и более глубокого знания частностей, так как возникновение каких-то неполадок (особенно их устранение) может поставить дилетанта в тупик. К тому же, не мешало бы знать самую простую бытовую необходимость: «А правильно ли работает устройство, или его нужно срочно выключить?»
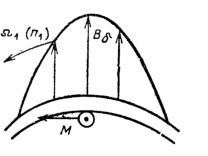 Теперь давайте рассмотрим принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором более пристально. В трёхфазной системе питающей сети обмотки статора создают вращающееся магнитное поле. В начальный момент, когда ротор неподвижен, магнитный поток статора пересекает проводники обмотки ротора. Как известно, при пересечении магнитных линий с витком в последнем наводится ЭДС. Так как обмотка ротора замкнута, то в ней возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора.
Теперь давайте рассмотрим принцип действия асинхронного эл. двигателя переменного тока с к.з. ротором более пристально. В трёхфазной системе питающей сети обмотки статора создают вращающееся магнитное поле. В начальный момент, когда ротор неподвижен, магнитный поток статора пересекает проводники обмотки ротора. Как известно, при пересечении магнитных линий с витком в последнем наводится ЭДС. Так как обмотка ротора замкнута, то в ней возникнет ток. Этот ток, взаимодействуя с магнитным полем, создает вращающий момент, под воздействием которого ротор придет во вращение. Направление вращения ротора будет совпадать с направлением вращения поля статора.
Что дальше? Частота вращения ротора будет возрастать, но не до бесконечности. Предельная частота вращения это частота вращения вращающегося поля статора. Однако ротор не может вращаться синхронно с полем статора, так как при синхронном вращении магнитное поле статора не будет пересекать проводники ротора, а это означает, что ток ротора, в таком случае, будет отсутствовать. Значит, частота вращения ротора, в любом случае, будет несколько меньше частоты вращения поля статора. Эта разница называется скольжением.
Если к валу эл. двигателя приложить какую-либо нагрузку (отрицательный момент), то величина скольжения увеличится, и момент двигателя возрастёт. На самом деле, когда никакой нагрузки нет, т.е. в двигатель находится режиме холостого хода, все-таки небольшой тормозной момент существует от трения в подшипниках. Однако, величина скольжения на холостом ходу близка к нулю.
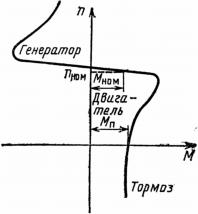 Что ж, теперь давайте посмотрим как эл. двигатель будет себя вести в случае увеличения нагрузочного момента. Сначала это будет почти прямая линия. Увеличение нагрузки ведёт к увеличению скольжения и, разумеется, незначительно падает скорость, но стремительно возрастает момент. Но вот беда (и это большой минус асинхронных эл. двигателей) дальше происходит ужасное. Достигнув критической точки, происходит резкое падение частоты вращения ротора до полной остановки, резко увеличивается ток в обмотке статора и ротора.
Что ж, теперь давайте посмотрим как эл. двигатель будет себя вести в случае увеличения нагрузочного момента. Сначала это будет почти прямая линия. Увеличение нагрузки ведёт к увеличению скольжения и, разумеется, незначительно падает скорость, но стремительно возрастает момент. Но вот беда (и это большой минус асинхронных эл. двигателей) дальше происходит ужасное. Достигнув критической точки, происходит резкое падение частоты вращения ротора до полной остановки, резко увеличивается ток в обмотке статора и ротора.
Таким образом, асинхронный эл. двигатель переменного тока с к.з. ротором становится не работоспособным при увеличении нагрузочного момента выше определённой критической точки. Номинальный момент существует только при незначительном уменьшении частоты вращения. Учитывая это обстоятельство, эксплуатировать такие эл. двигатели можно только с точно рассчитанной нагрузкой и загодя подбирать эл. двигатель определённой мощности и с определённой частотой вращения. Малейшая перегрузка недопустима. Механизм может остановиться, как будто эл. двигатель отключили от сети.
Есть ещё один минус. Асинхронные эл. двигатели имеют фиксированную частоту вращения, зависящую от частоты питающего переменного напряжения и числа пар полюсов обмотки статора. Плавно регулировать частоту вращения ротора не получается.
Если учесть, что в сети переменного напряжения частота равна 50 Гц, то фактически, частота вращения магнитного поля эл. двигателя переменного тока будет зависеть только от количества пар полюсов.
Ω=2πf/p =2πn/60 , где
Ω - угловая скорость поля статора;
f – частота подводимого напряжения;
n – частота вращения поля.
В результате имеем формулу для расчета синхронной частоты вращения:
n=60 f/p=3000/p (при f=50 Гц)
из которой видно, что фиксированные синхронные частоты будут:
p=1, n=3000 об/мин,
p=2, n=1500 об/мин,
p=3, n=1000 об/мин,
p=4, n=750 об/мин,
p=5, n=600 об/мин, и т.д.
Наиболее ходовые скорости в промышленности 3000 об/мин, 1500 об/мин, 1000 об/мин, 750 об/мин. Вообще, всегда стараются в механизмах использовать эл. двигатели с большими частотами вращения, т.к. количество пар полюсов достаточно заметно увеличивает габариты и стоимость эл. двигателя. Если сравнить эл. двигатель одной и той же мощности, то с меньшим количеством пар полюсов машина имеет меньшие габариты.
Очень часто можно встретить эл. двигатели переменного тока с большим количеством выводных концов. Это типичный пример обхода трудностей с регулировкой частоты вращения. Обмотки хитро рассчитываю на две скорости или четыре скорости. Получаются многоскоростные эл. двигатели. Это не очень удобно, но все-таки выход. При подключении разных выводных концов к сети двигатель работает на разных частотах вращения.
elektromehanika.org