





С
 уть этого способа торможения заключается в том, что якорь отключается от сети и замыкается на тормозное сопротивление
уть этого способа торможения заключается в том, что якорь отключается от сети и замыкается на тормозное сопротивление , а обмотка возбуждения остается подключенной к сети, как показано на рис.
, а обмотка возбуждения остается подключенной к сети, как показано на рис.
В этом случае машина работает генератором. Кинетическая энергия, запасенная в двигателе и вращающихся частях приводимого им механизма, преобразуется в электрическую и рассеивается в форме тепла в сопротивлении якорной цепи. Поэтому, как и в режиме противовключения понятие КПД здесь утрачивает смысл.
Вследствие того, что ЭДС двигателя по направлению остается такой же, как и до торможения, а напряжение к якорю не приложено, ток, текущий под действием этой ЭДС, из уравнения равновесия 
 .
.
Т.к. при динамическом торможении U=0, то и уравнение механической характеристики имеет вид:
и уравнение механической характеристики имеет вид: .
.
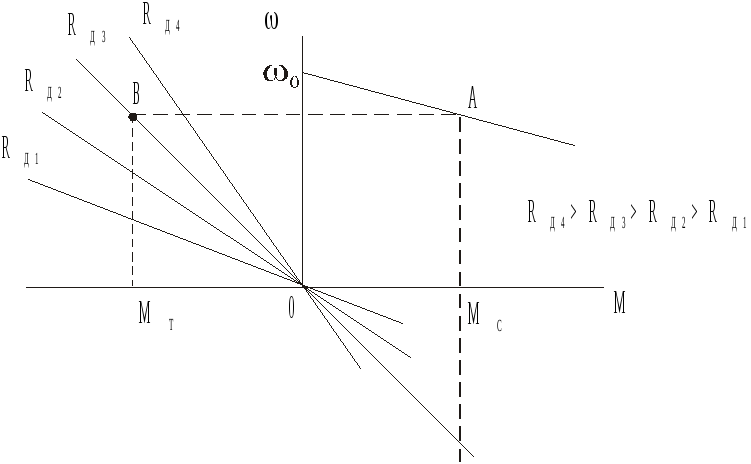
Момент, развиваемый двигателем, является тормозным. Семейство механических характеристик, соответствующих различным сопротивлениям, на которые замкнут якорь, изображено выше. Все они проходят через начало координат. Наиболее интенсивное торможение получается при замыкании якоря накоротко. При этом характеристика динамического торможения будет параллельна естественной. Однако по условиям ограничения первоначального броска тока замыкание якоря накоротко допустимо только при торможении на малых скоростях.
Обычно динамическое торможение осуществляется при номинальном потоке и широко применяется в эл.приводах, где требуется точная остановка. Оно может быть использовано и для тормозного спуска груза. Установившейся режим спуска будет иметь место при скорости определяемой точкой пересечения линии статического момента и механического характеристики (т. С на графике).
С энергетической т.з. динамическое торможение выгоднее противовключения, т.к. в процессе торможения из сети потребляется энергия только цепью возбуждения.
Динамическое торможение надежно, обеспечивает плавность торможения, можно получить характеристики с малой крутизной. Недостатком является уменьшение тормозного момента двигателя по мере снижения скорости, т.е. при снижении скорости оно становится малоэффективным.
Для расчета и построения естественной или искусственной механической характеристики ДНВ достаточно знать координаты 2-х точек, поскольку теоретически механические характеристики являются прямыми линиями. Эти 2 точки могут быть любыми. Однако построение естественной характеристики удобно производить по точкам, одна из которых соответствует координатам =Н, М=МН, а другая координатам=0, М=0.
Для нахождения этих точек необходимо знать паспортные данные двигателя и сопротивление обмотки якоря в нагретом состоянии (чаще при t=75С).
Скорость 0определяется исходя из следующего:
 .
.
Если RЯнеизвестно, его можно ориентировочно определять по потерям в меди, исходя из известного положения, что при нагрузке, соответствующей максимальному КПД переменные потери равны постоянным. Поскольку вблизи максимума КПД меняется мало, можно считать, что КПД максимален при номинальной нагрузке, т.е. при РН.
Полные потери при номинальной нагрузке равны разности потребляемой из сети мощности и номинальной мощности РНна валу, т.е. .
.
Номинальные потери в меди в этом случае равны половине полных потерь,  . Отсюда
. Отсюда Для генератора
Для генератора .
.
Здесь  - номинальное сопротивление двигателя.
- номинальное сопротивление двигателя.
Для двигателей последовательного возбуждения:  .
.
Для краново-металургических двигателей смешанного возбуждения  .
.
Номинальный момент  .
.
Находить номинальный момент по мощности двигателя и скорости будет неверным, т.к. отношение  - это момент на валу, а не электромагнитный.
- это момент на валу, а не электромагнитный.
Искусственная характеристика, соответствующая введению в цепь якоря добавочного сопротивления, рассчитывается и строится также по двум точкам: =0; М=0 и М=МНи=НИ, причемНИнаходится как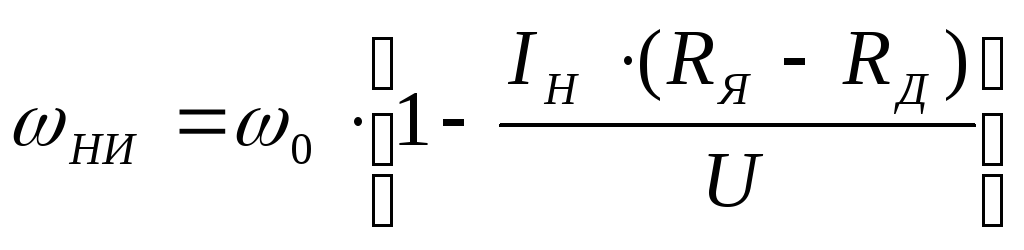 или
или .
.
Механическая характеристика может быть построена и по точкам с координатами:
=0; М=0 и=0; .
.
studfiles.net
 Электродвигатели в электроприводе могут стремительно приостановить производственный механизм, либо удержать определенную скорость при положительном моменте рабочей машины. В данном случае движок обращается в генератор и работает в одном из тормозных режимов: противовключения, динамическом, рекуперативном (смотрите рис. 1) зависимо от метода возбуждения.
Электродвигатели в электроприводе могут стремительно приостановить производственный механизм, либо удержать определенную скорость при положительном моменте рабочей машины. В данном случае движок обращается в генератор и работает в одном из тормозных режимов: противовключения, динамическом, рекуперативном (смотрите рис. 1) зависимо от метода возбуждения.
Торможение электропривода средством переключения обмоток фаз электродвигателя для получения вращения поля в обратном направлении (торможение противовключением) используют, когда нужно стремительно приостановить машинное устройство. При всем этом по инерции ротор крутится навстречу магнитному сгустку, скольжение электродвигателя становится больше единицы, а момент — отрицательным.
В движке неизменного тока для воплощения торможения противовключением меняют подключение концов обмоток якоря. При всем этом ток в якоре и момент меняют направление.
В обоих случаях действующее напряжение становится огромным, потому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря либо ротора.Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электронная машина работает генератором (динамо) с рассеиванием энергии торможения в тормозных резисторах и обмотках электродвигателя.
Для динамического торможения якорь мотора неизменного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных движках динамическое торможение достигается подачей неизменного тока в обмотку статора мотора.
Неизменный ток делает недвижное магнитное поле. При вращении ротора в его обмотках наводится ЭДС и возникает ток. Взаимодействие тока ротора с недвижным магнитным полем делает тормозной момент. Значение тормозного момента находится в зависимости от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
В режиме рекуперативного торможения ротор (якорь) присоединенного к сети электродвигателя крутится со скоростью, большейωо. В данном случае ток изменяет направление, электронная машина становится генератором, работающим наряду с сетью, энергия торможения за вычетом утрат отдается в электронную сеть.

Рис. 1. Включение и механические свойства электродвигателей: независящим возбуждением (а) и асинхронного (б) в режимах: I — двигательном, II — противовключения, III — динамического торможения, IV — генераторном с отдачей энергии в сеть.
Рекуперативное торможение употребляется в подъемных кранах, для удержания скорости при опускании грузов, для тесты и обкатки под нагрузкой авто и тракторных движков, редукторов, коробок перемены передач под нагрузкой, также во время перехода с большей скорости на наименьшую в многоскоростных электродвигателях.
elektrica.info
| Для электрических машин характерны два основных режима работы: двигательный и тормозной. При тормозном режиме работы подводимая к машине механическая энергия преобразуется в электрическую. Возникающий при этом вращающий момент не совпадает с направлением вращения машины и происходит ее торможение. Хотя существует несколько различных способов электрического торможения, однако, при всех способах происходит принципиально один и тот же процесс. Сами же способы отличаются друг от друга лишь схемой включения и характеристиками. Электрическая энергия, образующаяся при торможении, при различных способах используется по разному. В одних случаях она передается в электрическую сеть и там полезно используется, в других преобразуется в тепло в дополнительных сопротивлениях и якоре.
Необходимость использования электрических способов торможения в электроприводах грузоподъемных механизмов вызывается спецификой их работы. Торможение позволяет облегчить работу механических тормозов, получить устойчивые постоянные скорости спуска грузов, а также обеспечивает ускоренную остановку приводов. Для электродвигателей с параллельным возбуждением возможно использование трех тормозных режимов: а) генераторного с отдачей энергии в сеть; б) электродинамического; в) противовключения (противотока). Генераторный режим с отдачей энергии в сеть. Как указывалось, при работе электродвигателя на естественной или искусственной характеристике в двигательном режиме наводимая в обмотке якоря противо э. д. с. всегда меньше приложенного напряжения (Е<U) и ток в обмотке якоря
Этот ток создает вращающий момент электродвигателя М = кФIя, совпадающий с направлением вращения якоря. На холостом ходу электродвигателя, когда момент сопротивления на валу отсутствует, ток в обмотке якоря должен быть равен нулю, т. е. в этом случае противо э. д. с. равна приложенному напряжению:
Таким образом, при изменениях числа оборотов электродвигателя от 0 до n0 противо э. д. с., наводимая в обмотке якоря, всегда меньше приложенного напряжения (или, в крайнем случае, равна ему) и ток в обмотке якоря, согласно выражению (22), положителен, что характерно для двигательного режима работы машины. Если же под действием внешнего момента, например момента, созданного весом поднятого груза, число оборотов электродвигателя станет больше п0, его противо э. д. с. превысит приложенное напряжение и ток в обмотке якоря, согласно выражению (22), изменит направление, т. е. машина из потребителя электрической энергии превратится в ее источник. Очевидно, что при изменении направления тока меняется и направление момента, создаваемого электродвигателем. Этот момент становится тормозным и уравновешивает внешний момент, приложенный к валу электродвигателя. Это означает, что в уравнениях скоростной и механической характеристик знак минус меняется на плюс
т. е. характеристики генераторного режима являются продолжением характеристик двигательного режима машины и располагаются во II или в IV квадрантах (рис. 16). Нетрудно заметить, что при введении дополнительных сопротивлений в цепь якоря, скорость электродвигателя в генераторном режиме не уменьшается, а, наоборот, увеличивается. Данный способ электрического торможения весьма выгоден в экономическом отношении, так как он позволяет возвращать в сеть значительную часть электроэнергии, затраченную, например, на подъем груза. Однако он осуществим лишь при повышенных скоростях, намного превышающих номинальную скорость электродвигателя, и поэтому не всегда применим. Торможение с отдачей энергии в сеть не может быть применимо для остановки привода, так как пторм должно быть всегда больше п0. Опытные крановщики чаще всего используют данный способ торможения при погрузке судов, когда высота подъема груза значительно меньше высоты спуска. Осуществляя в данном случае спуск груза в генераторном режиме с отдачей энергии в сеть, можно получить ощутимую экономию электроэнергии и улучшить тем самым экономические показатели.
Режим электродинамического торможения. Несмотря на значительный экономический эффект, торможение с отдачей энергии в сеть применяется сравнительно редко, что объясняется указанными выше недостатками этого способа торможения. Чаще попользуется так называемое электродинамическое торможение, которое может применяться как для ограничения скорости спуска грузов, так и для ускорения остановки привода.
Под режимом динамического торможения понимается режим, возникающий при отключении вращающегося якоря от сети и замыкании его на сопротивление, называемое сопротивлением динамического торможения Rд. схеме, показанной на рис. 17, это осуществляется размыканием контактов Л, которые были замкнуты в двигательном режиме, и замыканием контакта Т. В этом случае уравнения скоростной и механической характеристик примут вид:
Указанные уравнения можно получить из выражений (27) и (32), положив в них U = 0 и заменив R на Rд. Уравнения (46) и (47) показывают, что характеристики электродвигателей параллельного возбуждения в режиме динамического торможения прямолинейны и проходят через начало координат (см. рис. 17). Очевидно, что большим сопротивлениям Rд соответствуют более мягкие характеристики, а при одной и той же скорости — меньшие тормозные моменты и токи. Рассмотрим особенности динамического режима на примере электропривода механизма подъема. При подъеме груза контакты Л должны быть замкнуты, а контакт Т разомкнут. Допустим, электродвигатель, поднимая груз, работает устойчиво в точке 1 на естественной характеристике а (М = Мс) со скоростью +п1. При размыкании контактов Л и замыкании контакта Т электродвигатель должен перейти на искусственную характеристику b, проходящую через начало координат. Электродвигатель обладает определенной инерцией, поэтому он, не изменяя скорости вращения, из точки 1 переходит в точку 2 или 2' на характеристике с в зависимости от величины сопротивления Rд. При этом меняется направление момента и электродвигатель начинает интенсивно тормозиться. При снижении скорости до нуля контакт Т нужно разомкнуть и включить механический тормоз. Если же контакт Т не будет разомкнут, то под действием груза электродвигатель начнет вращаться в обратную сторону, производя спуск груза в режиме динамического торможения. Устойчивая работа электродвигателя будет в точке 3 или 5, так как при работе в этих точках М = Мс. Таким образом, режим динамического торможения может быть использован не только для остановки, но и для получения определенной установившейся скорости. В рассматриваемом случае при спуске груза вращающий момент, развиваемый электродвигателем, по величине и по знаку такой же, как и при подъеме. Однако направление скорости при переходе через точку О изменилось, поэтому момент, развиваемый электродвигателем при спуске груза, будет тормозным моментом, ограничивающим скорость спуска. Груз будет опускаться с устойчивой скоростью — n3 или n2. Данный способ торможения отличается простотой, не требует сложных переключений в схеме; он позволяет регулировать время торможения или скорости спуска груза путем регулирования величины сопротивления Rд. Для осуществления торможения данным способом почти не требуется никаких затрат энергии, так как практически процесс торможения заключается в том, что машина работает как генератор с независимым возбуждением, замкнутый на сопротивление Rд. На вал электрической машины передается механическая энергия от затормаживаемого механизма. В машине она преобразуется в электрическую энергию, а последняя — в тепловую в обмотках машины и в сопротивлении Rд. Главным недостатком рассматриваемого способа следует считать довольно значительное время торможения, так как при малых оборотах значения тормозного момента очень невелики и этот способ нельзя считать целесообразным при необходимости быстрой остановки электропривода. Режим противовключекия. Для осуществления торможения электроприводов подъемно-транспортных машин нередко используется режим противовключения, под которым понимается такой режим, когда электродвигатель, будучи включен в сеть, вращается в сторону, противоположную той, в которой он вращался бы при таком же включении в двигательном режиме. Такой способ торможения может применяться для ограничения скорости спуска грузов и ускорения остановки привода.
Допустим, электродвигатель включен по схеме, показанной на рис. 18, а и, поднимая груз, работает на естественной характеристике а в точке 1 (рис. 18, б) при М = Мc (замкнуты контакты 1В, 2В и П). При размыкании контакта П в цепи электродвигателя окажется включенным дополнительное сопротивление Rт и электродвигатель перейдет на искусственную характеристику b в точке 2 (см. рис. 18, б). Так как момент, развиваемый в точке 2, будет меньше момента сил сопротивления (М<Мc), то скорость электродвигателя начнет быстро снижаться и в точке 3 станет равной 0. Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети. Если же электродвигатель не будет отключен от сети, то иод действием груза он начнет разгоняться в противоположную сторону. По мере разгона электродвигателя возрастает тормозной момент на его валу и при числе оборотов— n2 (точка 4) он станет равным моменту, создаваемому весом поднятого груза. Работа электродвигателя в точке 4 на характеристике b будет устойчивой и скорость спуска груза будет ограничена величиной —n2. Скорость спуска в данном случае можно регулировать изменением величины дополнительного сопротивления Rт, вводимого в цепь якоря. Чем выше величина этого сопротивления, тем мягче характеристика b и тем выше будет скорость спуска груза. В рассматриваемом случае при переходе электродвигателя в режим противовключения скорость меняет свой знак, знак же момента (и тока) остается неизменным по сравнению с двигательным режимом. Это и обусловливает эффект торможения. Машина превращается в источник электроэнергии, которая расходуется в сопротивлениях цепи якоря. В этих же сопротивлениях, а также в обмотке возбуждения расходуется та электроэнергия, которая поступает из сети. В тех случаях, когда направление момента сопротивления на валу электродвигателя определяется направлением его вращения, режим противовключения указанным выше способом получить невозможно. В этом случае для ускорения остановки или быстрого реверса привода необходимо произвести переключение обмотки якоря. Предположим, что в схеме на рис. 18, а замкнуты контакты 1В, 2В и П и электродвигатель работает устойчиво на естественной характеристике а в точке 1 (рис. 18, в) при М=Мc. Для осуществления быстрого торможения или реверса нужно разомкнуть контакты 1В и 2В и замкнуть контакты 1Н и 2Н. При этом направление тока, а следовательно, и момента изменяется и электродвигатель окажется в тормозном режиме противовключения. Чтобы избежать при этом большого толчка тока и момента, необходимо одновременно с контактами 1В и 2В разомкнуть контакты П, что приводит к введению дополнительного сопротивления. Тогда при замыкании контактов 1Н и 2Н электродвигатель переходит на характеристику b, проходящую через точку — n0. Вначале электродвигатель перейдет на работу, соответствующую точке 2 на характеристике b. Так как момент электродвигателя и статический момент не соответствуют направлению скорости, последняя начинает быстро уменьшаться и в точке 3 станет равной нулю. Если требуется остановить электродвигатель, то при скорости n = 0 его следует отключить от сети; если же необходимо произвести реверс, то при n = 0 отключают сопротивление Rт, после него начинается обычный пуск электродвигателя в противоположную сторону. Торможение противовключением является довольно эффективным для механизмов горизонтального передвижения мостов и тележек кранов и механизмов поворота. Оно применяется также для торможения механизмов подъема, особенно при спуске тяжелых грузов. Однако с экономической точки зрения режим противовключения не является выгодным, так как в обмотках машины и дополнительном сопротивлении в тепло превращается не только энергия торможения, но и энергия, подводимая от сети. Дополнительное сопротивление Rт должно быть приблизительно равно полному сопротивлению пускового реостата. Это связано с тем, что в режиме противовключения э. д. с. обмотки якоря совпадает по направлению с приложенным напряжением и для ограничения токов, возникающих при этом режиме, необходимо значительное сопротивление. Это означает, что для снижения тока, возникающего в момент перевода электродвигателя в режим противовключения, до допустимых значений в цепь якоря электродвигателя необходимо включать не только дополнительное сопротивление Rт, но и пусковой реостат. При этом тон в обмотке якоря, согласно выражению (22), будет
где R —сопротивление пускового реостата. Изменение направления вращения. Изменение направления вращения (реверс) электродвигателя с параллельным возбуждением может быть осуществлено двумя способами: изменением направления тока в обмотке возбуждения или изменением направления тока в обмотке якоря. И в том, и в другом случае изменяется направление вращающего момента, согласно выражению (5), что и обусловливает реверс электродвигателя. На практике обычно используют второй способ, обеспечивающий более быстрое изменение направления вращения. Объясняется это следующим: а) размыкание цепи возбуждения требует предварительного .размыкания цепи якоря, что связано с усложнением аппаратуры. Размыкание якоря необходимо для предотвращения чрезмерного увеличения тока в нем при уменьшении магнитного потока; б) обмотка возбуждения электродвигателя параллельного возбуждения обладает значительной индуктивностью и разрыв ее связан с опасностью пробоя изоляции; в) при изменении направления тока в обмотке возбуждения происходит перемагничивание машины, что увеличивает продолжительность операции и приводит к дополнительным потерям энергии, особенно при частых реверсах. Практически для осуществления реверса электродвигателя с параллельным возбуждением указанным способом служат контакты 1В, 2В, 1Н и 2Н (см. рис. 18, а). При работе электродвигателя замкнуты попарно либо контакты 1В и 2В, либо 1Н и 2Н. Их переключение приводит, как видно из схемы, к изменению направлении тока в обмотке якоря, а последнее к изменению направления вращения электродвигателя. |
vdvizhke.ru


















