00 5I4397
ОПИСАН И Е
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Савв Советских
Социалистических
Республик (61) Дополнительное к авт. свид-ву (22) Заявлено 04.04.74 (21) 2012654/07 (51) М. Кл.- Н 02К 29,/04 с присоединением заявки №
Государственный комитет
Совета Министров СССР лв делам иэобретений и открытий (23) Приоритет
Опубликовано 15.05.76. Бюллетень № 18
Дата опубликования описания 17.06,76 (53) УДК 621.313.13:621. .382 (088.8) (72) Авторы изобретения
В. Д. Кондрашов, Н. Н. Горин, В. А. Кучумов и В. А. Сенаторов (71) Заявитель
Всесоюзный научно-исследовательский институт железнодорожного транспорта (54) СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ
Изобретение относится к области управления электрическими преобразователями частоты и числа фаз (ПЧФ) вентильных двигателей (ВД), выполненных по схемам с неявным звеном постоянного тока.
Известен способ управления ВД, согласно которому система управления ПЧФ ВД формирует импульсы управления коммутациями сети и машины вне зависимости от взаимной ориентации напряжений сети и машины, причем сигналы управления конкретным вентилем вырабатываются из указанных сигналов управления, например, по правилу логического умножения И.
Недостатком известного способа является взаимозависимость между длительностями машинной и сетевой коммутаций при их одновременном протекании (совпадении во времени) в случае, если ПЧФ выполнен по схеме с неявным звеном постоянного тока. Взаимозависимость коммутаций выражается в том, что как в случае начала машинной коммутации во время протекания сетевой, так и в случае начала сетевой коммутации во время протекания машинной закончиться коммутации могут лишь одновременно. Происходит, таким образом, выравнивание длительностей коммутаций, т. е. укорачивание той коммутации, которая в случае несовпадения длиннее, и удлинение той, которая при разновременном протекании коммутаций короче. Так как у ВД одна из коммутаций всегда инверторная (в тяговом режиме — машинная, в режиме рекуперации— сетевая), то для повышения коммутационной
5 устойчивости ПЧФ угол опережения инвертора должен задаваться с запасом, учитывающим возможность затягивания инверторной коммутации при совпадении коммутаций. Необходимость такого увеличения угла опереже10 ния инвертирования возникает в тяговом режиме при скорости движения, превышающей синхронную (требуется увеличивать угол опережения машинной коммутации), и в режиме рекуперации при скоростях двигателя, меньших синхронной (требуется увеличение угла опережения сетевой коммутации). Это ухудшает энергетические показатели привода с ВД, особенно коэффициент мощности инвертируемой энергии.
20 Целью изобретения является повышение энергетических показателей преобразователя и улучшение использования мощности двигателя путем исключения взаимного влияния коммутаций в случае нх совпадения во време25 ни, что приводит к сокращению углов опережения инверторной коммутации в ПЧФ. Это достигается тем, что внутри интервала одновременного протекания сетевой и машинной коммутаций определяют вентиль, включенный
30 между коммутирующими выводами сети и
514397 двигателя так, что проводящее направление указанного вентиля противоположно направлению коммутирующего напряжения источника, начавшего коммутировать до наступления интервала совпадения коммутаций, и совпадает с направлением тока в том из коммутирующих выводов источника, к которому подключен указанный вентиль, и подают на него дополнительный управляющий импульс.
Наиболее просто указанный дополнительный импульс можно выделить посредством продолжения зон подачи основных импульсов сетевой и машинной коммутаций на угол, соответствующий максимальной длительности коммутации, начавшейся первой.
Для улучшения условий включения вентилей указанный дополнительный импульс можно формировать в момент изменения направления напряжения между коммутирующими выводами двигателя по отношению к направлению, которое оно имело непосредственно перед началом машинной коммутации.
На фиг. 1 представлена одна из возможных схем ВД с неявным звеном постоянного тока; на фиг. 2 изображены открытые вентили схемы, изображенной на фиг. 1, при протекании машинной коммутации; на фиг. 3 изображена схема, соответствующая одновременному протеканию коммутаций в случае, когда сетевая коммутация началась вслед за машинной; на фиг, 4 представлена схема ВД при одновременном протекании коммутаций с образованием совместного контура сетевой и машинной коммутаций; на фиг. 5 приведены временные диаграммы коммутирующих напряжений ВД и процессов управления им в режиме рекуперации при выполнении ВД по схеме на фиг. 1; на фиг. 6 представлена схема ВД при совпадении коммутаций в случае, когда машинная коммутация началась вслед за сетевой; на фиг. 7 — схема ВД при совпадении коммутаций, если управление ВД ведется по предлагаемому способу; на фиг. 8 показано состояние ВД, следующее за состоянием, изображенным на фиг. 7.
Предлагаемый способ пригоден для использования в ВД с ПЧФ различных типов, работающих в тяговом и в рекуперативном режимах, и может применяться в обоих режимах для управления любой схемой ВД с неявным звеном постоянного тока. Ниже описывается управление по предлагаемому способу ВД со сложным реактором при питании трехфазного двигателя от однофазной сети.
В тяговом режиме ПЧФ ВД, состоящий из вентилей 1 — 12, выпрямляет напряжение трансформатора 13 питающей сети, подводимое через реактор 14. Одновременно происходит инвертирование выпрямленного напряжения в тяговый двигатель с фазными обмотками 15, 16 и 17, ПЧФ ВД выполняет, таким образом, функции однофазного мостового выпряглителя, питающего напряжения сети и ведомого двигателем трехфазного мостового инвертора. В режиме рекуперации тот же ПЧФ
65 выпрямляет напряжение двигателя и инвертирует его в питающую сеть.
Если управление ВД производится по известному способу, то начало сетевой коммутации, т. е. временная абсцисса переднего фронта коммутационного провала 18 на временной диаграмме 19 выходного напряжения инвертора, является моментом, когда накладывается запрет на подачу импульсов управления на одну из групп вентилей 1, 3, 5, 8, 10, 12 и 2,4, 6, 7, 9, 11 и выдается разрешение на подачу импульсов управления вентилям другой группы.
Этот момент формирования импульса управления сетевой коммутацией является началом зоны подачи импульсов управления машинной коммутации на одну из указанных групп вентилей и концом аналогичной зоны другой группы. Сверху от оси времени на диаграмме 20 изображены зоны подачи импульсов управления на вентили 2, 4, 6, 7, 9, 10, снизу — на вентили 1, 3, 5, 8, 10, 12. Кривая напряжения инвертора на диаграмме 19 изображена для режима с углом коммутации, равным 30 эл. град. напряжения сети. Угол запаса (угол между задним фронтом коммутационного провала 18 и моментом перехода через нуль напряжения инвертора) также равен 30 эл. град. напряжения сети в стационарном режиме.
Линейные напряжения U15 — 16, U16 — 1- и U17 — 15 двигателя представлены на временной диаграмме 21 соответственно кривыми А, Б и В.
Импульсы управления машинной коммутацией формируются в режиме, показанном на диаграмме 21 с задержкой т относительно перехода через нуль линейных коммутирующих напряжений, равной 30 эл. град. э.д.с. машины.
Углы машинной коммутации при этом составляют 30 эл.град.э.д.с. машины в стационарном режиме. Моменты формирования основных импульсов машинной коммутации являются началом зон подачи импульсов управления сетевой коммутацией на определенные группы вентилей. Зоны подачи импульсов управления сетевой коммутацией для вентилей 5, 6 и 11, 12 представлены а временной диаграмме 22 соответственно сверху и снизу от оси времени.
Аналогичные зоны для вентилей 3, 4 и 9, 10 изображены на диаграмме 23, для вентилей
1, 2 и 7, 8 — на диаграмме 24.
Как видно из диаграмм 22, 23 и 24 длительность каждой из зоп равна длительности работы фазы двигателя, т. е. 120 эл. град. машины. Зона работы конкретного вентиля преобразователя формируется из зон на диаграммах 20, 22, 23 и 24 rro правилу логического умножения И. Импульс управления соответствующим вентилем формируется в момент начала «своей» зоны. На диаграмме 25 сверху и снизу показаны соответственно зоны работы вентилей 1 и 2. Аналогично диаграммы 26 и 27 иллюстрируют соответственно работу вентилей3,4и5,6.
Если импульс управления сетевой коммутацией следует за импульсом управления машинной коммутацией с интервалом, меньшим
514397 длительности сетевой коммутации, то происходит совпадение коммутаций по времени. Интервалы одновременного протекания коммутаций для взаимной ориентации напряжений сети и двигателя по диаграммам 19 и 21 изображены на диаграмме 28. При этом мгновенное состояние схемы ВД, для момента времени 1 на диаграмме 27 представлено на фиг. 2. Этот момент является началом коммутации тока с фазы 16 EIB фазу 17 двигателя. Р момент (1 на диаграмме 27 начинается очередная сетевая коммутация, получают импульсы управления вентили 6 и 9. Мгновенная схема преобразователя в этом состоянии изображена на фиг. 3. Характерной особенностью ее является наличие вентиля 5, в котором токи машинной и сетевой коммутаций протекают во взаимно противоположных направлениях, что может привести схему к состоянию, показанному на фиг. 4. Отличительной чертой такого состояния является наличие единого контура совместной коммутации нагрузки и сети, в который входят вентили 1, 6, фазы 16 и 17 двигателя, две обмотки реактора и сетевой трансформатор. В результате окончание как сетевой, так и машинной коммутаций может быть только одновременным — после закрытия вентиля 1. Длительность существования мгновенной схемы, показанной на фиг. 4, т. е. длительность совместной коммутации, может отличаться в несколько раз от длительностей разновременно протекающих при данном режиме работы ПЧФ сетевой и нагрузочной коммутаций.
Совпадение коммутаций может явиться как следствием того, что сетевая коммутация началась во время протекания машинной, так и в результате того, что машинная коммутация началась во время протекания сетевой. Первый случай иллюстрирует фиг. 3, второй— фиг. 7.
Если управлением ПЧФ производится по предлагаемому способу, то при совпадении коммутаций за счет включения дополнительного вентиля в ПЧФ образуются один дополнительный контур сетевой коммутации и один дополнительный контур машинной коммутации и схема переходит в состояние, изображенное на фиг. 7. Такое «симметричное» по отношению к коммутирующим напряжениям состояние схемы обеспечивает независимое протекание совпавших коммутаций, позволяя им закончиться в разное время. Так, переход схемы от состояния, показанного на фиг. 7, к состоянию, показанному на фиг. 8, возможен, когда сетевая коммутация короче машинной.
Если совпадение коммутаций произошло в результате начала машинной коммутации во время протекания сетевой (фиг. 6), то для создания искусственных контуров, обеспечивающих независимое окончание коммутаций, необходимо включить вентиль 5. Если сетевая коммутация началась вслед за машинной (фиг.
3), то необходимо включить вентиль 2.
На диаграмме 29 сверху отмечены моменты подачи дополнительных импульсов на вентиль
3, снизу — на вентиль 2, Диаграмма 30 иллюстрирует подачу дополнительных импульсов соответственно на вентили 5 и 6.
Подача дополнительного импульса управления на требуемый вентиль ПЧФ возможна, в частности, двумя путями.
Первый из них основан на том, что искомый вентиль всегда находится в «выключающейся» группе вентилей, причем в той, которая начала коммутировать раньше. Если к совпадению коммутаций привело начало коммутации сетевой вслед за машинной, то для включения требуемого вентиля необходимо и достаточно, чтобы импульс сетевой коммутации подавался не только на вентиль, подключенный к включающейся при коммутации фазе двигателя, но и на вентиль, подключенный к фазе двигателя, выключающейся при данной машинной коммутации, т. е. на вентиль, на который данный импульс сетевой коммутации поступил бы, если бы сетевая коммутан началась раньше машинной. Наиболее просто такой алгоритм управления осуществить, если вне зависимости от взаимной ориентации коммутаций во времени зону подачи импульсов сетевой коммутации на вентили ПЧФ, соответствующую известному способу управления, увеличить путем добавления к ее задней границе дополнительного интервала времени, равного по длительности максимально возможной машинной коммутации. Величина м".êñèìàëüíîé длительности машинной коммутации определяется режимом работы и схемой ПЧФ и для схемы, изображенной на фиг. 1, соответствует 60 эл. град.э,д.с. машины при рекуперации.
Если одновременное протекание коммутаций является следствием того. что машинная коммутация началась при протекании коммутации сетевой, то вентиль, включение которого необходимо для образования требуемых искусственных контуров, получает импульс управления, если удлинить зону подачи импульсов машинной коммутации на величину максимально возможной длительности коммутации сетевой.
Таким образом, первый путь формирования дополнительных импульсов управления состоит в изменении алгоритма распределения импульсов управления ПЧФ.
Сверху от оси времени на диаграмме 31 показаны зоны подачи импульсов управления машинной коммутацией в соответствии с предлагаемым способом на вентили 2, 4, 6, 7, 9, 11, снизу — на вентили 1, 3, 5, 8, 10, 12. Штриховкой помечены части зоны, добавленные в соответствии с предлагаемым способом для формирования требуемых дополнительных импульсов, На диаграммах 32, ЗЗ и 34 аналогично изображены зоны подачи импульсов управления сетевой коммутацией соответственно на вентили 5, 6 и 11, 12; 3, 4 и 9, 10; 1. 2 и 7, 8.
Второй путь подачи дополнительного импульса управления на требуемый вентиль осчован на том, что в момент, когда в результате совпадения коммутаций в схеме происхо514397 дит образование контура совместной коммутации, аналогичного представленному на фиг. 4, на кривой линейного напряжения коммутирующих фаз двигателя появляются пики напряжения с полярностью, противоположной полярности указанного напряжения в момент, непосредственно предшествующий коммутации. На кривых А, Б и B линейных коммутирующих напряжений на фиг. 5 эти пики, Г, видны как перебросы через нуль линейного напряжения двигателя в момент совпадения коммутаций. Эти всплески напряжений двигателя предлагается использовать в качестве информации о необходимости дополнительного импульса управления на ПЧФ.
Условия для включения вентиля 2 в момент, соответствующий фиг. 4, лучше, чем в момент, соответствующий фиг. 3, так как в первом случае вентиль 2 включается под воздействием коммутирующего напряжения сети, а во втором случае это напряжение включает два параллельно включенных вентиля 2 и 6.
Предлагаемый способ пригоден и для схем
ВД с другим числом фаз двигателя или питающей сети. Соответственно изменению числа фаз изменяется лишь длительность зон подачи импульсов управления.
Формула изобретения
1. Способ управления вентильным двигателем е неявным звеном постоянного тока путем подачи на электрические вентили основных импульсов управления, вызывающих начало сетевой и машинной коммутаций, причем зона подачи основных импульсов машинной коммутации составляет 180 эл, град. напряжения сети и зона подачи основных импульсов сетевой коммутации составляет 120 эл. град. э.д.с. машины со случайным взаимным смещением по фазе между основным сетевым и основным машинным импульсами, а выключение элек5 трических вентилей происходит под воздействием соответствующего коммутирующего напряжения между коммутирующими выводами источника (сети или машины), о т л и ч а юшийся тем, что, с целью повышения энерге1О тических показателей вентильного двигателя, внутри интервала одновременного протекания сетевой и машинной коммутаций определяют вентиль, включенный между коммутирующими выводами сети и двигателя, проводящее на15 правление которого противоположно направлению коммутирующего напряжения источника, начавшего коммутировать до наступления совпадения коммутаций интервала, и совпадает с направлением тока в том из коммутирующих выводов источника, к которому подключен указанный вентиль, и подают на него дополнительный управляющий импульс.
2. Способ по п. 1, отлич ающийся тем, что указанный дополнительный импульс обра25 зуют посредством продления зон подачи основных импульсов сетевой и машинной коммутаций на угол, соответствующий максимальной длительности коммутации, начавшейся первой.
30 3. Способ по п. 1, отл ич а ющи йся тем, что, с целью улучшения условий для включения электрических вентилей, указанный дополнительный импульс формируют в момент изменения направления напряжения между
35 коммутирующими выводами двигателя по отношению к направлению, которое оно имело непосредственно перед началом машинной коммутации.
514397
Составитель А. Санталов
Техред Е. Подурушина
Редактор Т. Юрчикова
Корректор Т. Гревцова
Типография, пр. Сапунова, 2
Заказ 1305/18 Изд. № 1335 Тираж 882 Подписное
ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5







www.findpatent.ru
Авторы патента: Миляшов Н.Ф. (RU), Васильев А.В. (RU), Миляшов А.Н. (RU), Сабитов Р.Ф. (RU)
Изобретение относится к области электротехники, а именно к вентильным электродвигателям. Технический результат изобретения, заключающийся в упрощении схемы и конструкции электродвигателя, достигается путем того, что в вентильном электродвигателе, содержащем пассивный явнополюсный ротор с m полюсами, статор с 2n полюсами, несущими сосредоточенную на полюсах n-фазную обмотку, секции которой соединены с выходом n-фазного инвертора, выполненного на транзисторах в виде n-параллельно соединенных ячеек, фазные обмотки которых расположены на полюсах статора, инвертор выполнен с уменьшенным вдвое количеством транзисторов, каждый полюс статора дополнительно снабжен базовой обмоткой, а базовые обмотки, подключенные к базе транзистора каждой фазы, расположены на разных полюсах статора собственной и предыдущей по порядку чередования фаз и соединены встречно-последовательно. 4 ил.
Изобретение относится к электротехнике, в частности к вентильным электродвигателям, используемым в регулируемом электроприводе.
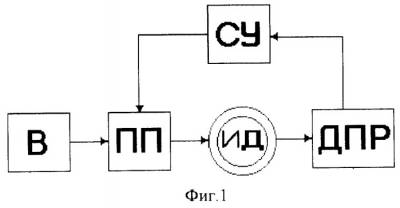
Известен вентильно-индукторный двигатель (ВИД) [Осташевский Н.А., Ковган А.Н. Вентильно-индукторный привод как перспективный вид регулируемого электропривода. //Електротехнiка и Електромеханiка-2002. №1. С.52-56], содержащий исполнительный двигатель (ИД), полупроводниковый преобразователь (ПП), управление преобразователем осуществляется системой управления (СУ) при помощи датчиков положения ротора (ДПР). Питание системы осуществляется от сети постоянного тока через выпрямитель (В). ИД представляет собой индукторную машину с пассивным ротором и сосредоточенными обмотками фаз на полюсах статора. На фиг.1 представлена структурная схема двигателя.
Основными недостатками данных двигателей является наличие ДПР, значительно усложняющего и удорожающего конструкцию двигателя, и сложность реализации системы управления коммутацией при применении бездатчикового управления.
Известен вентильный двигатель [Авторское свидетельство СССР №819893, М.кл3 Н 02 К 29/02, опубл. 07.04.81, БИ №13], у которого обмотки статора являются одновременно рабочими элементами ИД и ПП, представляющий собой электрическую машину, в которой двухфазный ПП совмещен с обмотками статора двухфазного асинхронного двигателя с короткозамкнутым ротором. На обмотках каждой из фаз собран генератор Ройера, а управление силовыми транзисторами осуществляется базовыми обмотками, расположенными на полюсах статора.
Недостатком двигателя является наличие большого числа силовых транзисторов на конденсаторов на фазу, цепи синхронизации, а также сложность конструкции самой электрической машины.
Наиболее близким заявленному является ВИД [Ильинский Н.Ф., Бычков М.Г. Вентильно-индукторный привод для легких электрических транспортных средств//Электротехника. 2000. №2. С.28-31], состоящий из ИД индукторного типа, коммутатора - ПП и развитого микропроцессорного блока управления - СУ. Исключение ДПР здесь осуществлено за счет специального управления коммутацией, когда текущая информация о значении токов используется для определения углов коммутации в любом режиме работы. Данный способ управления может быть реализован на базе микропроцессора.
Недостатком данного двигателя является наличие двойного числа транзисторов на фазу и сложность системы управления коммутацией. Здесь управление коммутацией основано на применении специально организованного "наблюдателя" в системе с релейным регулятором тока и ШИМ-генератором, ограничивающим частоту переключения силовых ключей инвертора. Кроме того, данный способ управления имеет дополнительные трудности реализации в приводах малой мощности, где необходимо принимать во внимание изменение удельного сопротивления обмоток при изменении температуры.
Задачей изобретения является упрощение схемы и конструкции двигателя.
Задача решается разработкой вентильного электродвигателя, содержащего пассивный явнополюсный ротор с m полюсами, статор с 2n полюсами, несущими сосредоточенную на полюсах n-фазную обмотку, секции которой соединены с выходом n-фазного инвертора, выполненного на транзисторах в виде n-параллельно соединенных ячеек, фазные обмотки которых расположены на полюсах статора. Причем инвертор выполнен с уменьшенным вдвое количеством транзисторов, каждый полюс статора дополнительно снабжен базовой обмоткой, а базовые обмотки, подключенные к базе транзистора каждой фазы, расположены на разных полюсах статора собственной и предыдущей обмоток по порядку чередования фаз и соединены встречно-последовательно.
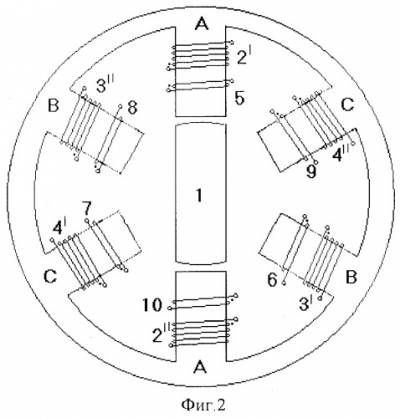
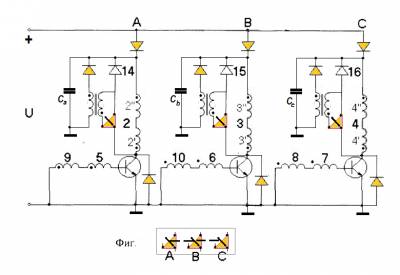
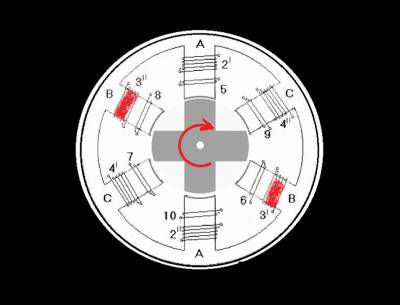
На фиг.2 приведена принципиальная схема расположения фазных и базовых обмоток предлагаемого двигателя на основе трехфазной машины.
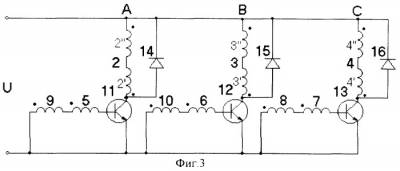
На фиг.3 приведена электрическая схема подключения фазных и базовых обмоток предлагаемого двигателя на основе трехфазной машины.
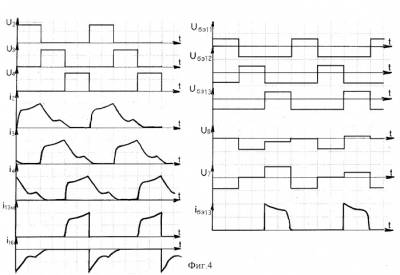
На фиг.4 приведены основные осцилограммы токов и напряжений на фазных и базовых обмотках.
Устройство содержит трехфазную машину переменного тока индукторного типа, включающую в себя явнополюсный ротор 1 и первичную трехфазную обмотку с секциями 2, 3, 4, состоящими соответственно из полуобмоток 2’, 2’’, 3’, 3’’, 4, 4’’, расположенную на полюсах статора, совместно с базовыми обмотками 5-10. Трехфазная обмотка электрической машины питается от источника постоянного напряжения через трехфазный инвертор, каждая фаза которого представляет собой однокаскадный генератор с магнитными связями и содержит одинаковые элементы. В качестве управляемых ключей в схеме используются транзисторы. Каждая фаза подключена одним концом к коллектору транзисторов 11, 12, 13, а другие концы фаз соединены с положительной точкой источника питания. Для устранения возможного пробоя транзиторов при их запирании, каждая из фазных обмоток шунтируется диодами 14, 15 и 16, включенными обратно по отношению к питающему напряжению схемы U.
Рассмотрим работу схемы с момента пуска. При подключении питания, в связи с разбросом параметров транзисторов допустим, что положительное напряжение U открывает транзистор 11 по его базовой цепи и этим начинается первая треть периода работы инвертора. Вследствие увеличения протекающего по первичной обмотке 2 тока в базовых обмотках 5-10 наводятся ЭДС (Е). Причем E5=E8, а Е6=Е7=Е9=Е10=0,3 Е5. Включение встречно-последовательно собственной и предыдущей по порядку чередования фазы базовых обмоток обусловлено тем, что суммарная ЭДС базовых обмоток открывает транзистор 11 и закрывает транзисторы 12 и 13. При увеличении тока в коллекторной цепи транзистора 11 рабочая точка перемещается по выходной характеристике и переходит из активной зоны в область насыщения. Прекращается увеличение тока коллектора, поэтому ЭДС в базовых обмотках становится равной нулю. Транзистор 11 закрывается. Ток коллектора протекает по замкнутой цепи: обмотка 2 - диод 14. Ток коллектора уменьшается, что приводит к возникновению противоположных по знаку ЭДС в базовых обмотках. Транзистор 12 открывается, и этим начинается вторая треть периода работы инвертора. Далее работа фаз В и С инвертора происходит аналогично фазе А. Периодическое подключение фазных обмоток 2, 3, 4 к источнику питания приводит за счет магнитного притяжения к смещению соответствующих полюсов явнополюсного ротора в направлении ближайших возбужденных полюсов статора. В результате возникает непрерывное вращение.
Рассматривая заявленное устройство в сравнении с аналогами и прототипом, можно сделать вывод о том, что заявленный вентильный электродвигатель имеет упрощенную схему управления за счет того, что новая совокупность признаков позволяет исключить систему “наблюдатель”, релейный регулятор и ШИМ-генератор, уменьшить вдвое количество силовых транзисторов, обладает высокой технологичностью и дешевизной при его практической реализации.
Формула изобретения
Вентильный электродвигатель, содержащий пассивный явнополюсный ротор с m полюсами, статор с 2n полюсами, несущими сосредоточенную на полюсах n-фазную обмотку, секции которой соединены с выходом n-фазного инвертора, выполненного на транзисторах в виде n параллельно соединенных ячеек, фазные обмотки которых расположены на полюсах статора, отличающийся тем, что инвертор выполнен с уменьшенным вдвое количеством транзисторов, каждый полюс статора дополнительно снабжен базовой обмоткой, а базовые обмотки, подключенные к базе транзистора каждой фазы, расположены на разных полюсах статора собственной и предыдущей по порядку чередования фаз и соединены встречно-последовательно.
___________________________________________________________________________________________
Мне понравилась идея поэтому дополню материал своими соображениями организацией импульсной рекуперацией энергии в моторе
Сначала просто пустить самоиндукцию в цепь питания
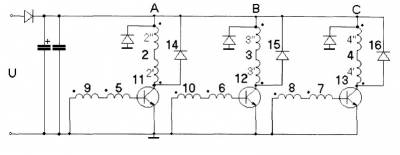
Так же вариант применения рекуперационных трансформаторов
и доработанная схема на основе внедрения в неё рекуперационного трансформатора
ua-hho.do.am
Известно, что системами электропривода потребляется значительная часть вырабатываемой в мире электроэнергии, поэтому ученые и инженеры во всех странах стремятся максимально повысить потребительские свойства электроприводов. Одним из перспективных классов электрических машин для электроприводов являются вентильные двигатели (ВД) с возбуждением от постоянных магнитов. ВД обладают уникальным сочетанием свойств, недостижимым для других типов электрических машин (асинхронных, коллекторных постоянного тока, индукторных), а именно — высокой энергетической эффективностью, повышенными динамическими свойствами, малыми массой и габаритами, хорошей управляемостью. До недавнего времени основным фактором, препятствующим широкому внедрению ВД, являлась повышенная стоимость изготовления ротора с постоянными магнитами по сравнению с производством роторов для других типов электрических машин. Однако заметный прогресс как в производстве самих магнитов, так и в технологии сборки роторов привел в последнее время к заметному снижению стоимости ВД, а многообразие современных магнитных материалов и магнитных систем позволяет предельно гибко и эффективно проектировать ВД с заданными параметрами. Более того, использование новейших достижений в областях силовой и информационной электроники позволяет реализовывать различные алгоритмы управления ВД для обеспечения регулирования выходных параметров электроприводов. Однако, в состав классических ВД [1] входит узел датчика положения ротора (ДПР), что существенно удорожает конструкцию и предполагает наличие проводной связи этого узла с электронным преобразователем, управляющим работой ВД. Поэтому во всем мире проводятся интенсивные работы по созданию синхронных двигателей с возбуждением от постоянных магнитов без ДПР, в которых определение углового положения ротора осуществляется системой управления. Первоначально системы бездатчикового синхронного электропривода строились на основе цифровых сигнальных процессоров. Были разработаны достаточно сложные программные алгоритмы определения положения ротора, реализация которых требовала дорогих 32-разрядных процессоров, а написание рабочих программ — существенных затрат времени высококвалифицированных программистов.
Компания IR также включилась в разработку систем управления бездатчиковыми электрическими машинами, однако в своих исследованиях специалисты компании попытались избежать использования дорогостоящих сигнальных процессоров. При разработке системы iMotion для определения положения ротора был применен алгоритм на жесткой логике — Motion Control Engine (MCE). Участие микроконтроллера заключается лишь в конфигурировании параметров MCE. Это позволяет применять простой и дешевый микроконтроллер без снижения быстродействия и качества работы системы электропривода. В приводах iMotion используется микроконтроллер семейства 8051. Применение такого подхода, по данным разработчика [2] позволяет в 4-5 раз сократить время расчетов и, как следствие, увеличить быстродействие системы, а также освобождает разработчиков электропривода от необходимости составления и отладки алгоритмов определения положения ротора.
Для запуска электродвигателя в платформе iMotion используется трехступенчатый алгоритм (рис. 1), состоящий из этапов:
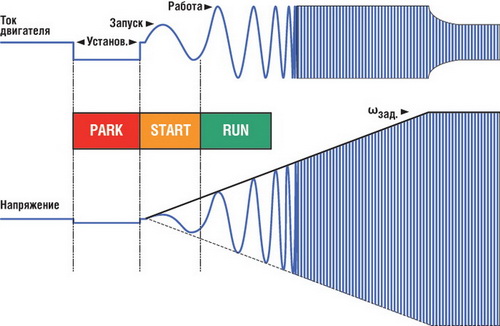
Рис. 1. Алгоритм запуска двигателя с постоянными магнитами
На первом этапе в фазы двигателя подается постоянный ток в течение заданного времени. При этом ротор ориентируется по оси созданного магнитного поля. Затем, на втором этапе, начинается частотный разгон двигателя, частота приложенного к двигателю напряжения увеличивается с интенсивностью, определяемой максимальным моментом двигателя и моментом инерции системы. При этом момент, развиваемый двигателем, пропорционален току статора и углу рассогласования его с полем ротора. Если момент, развиваемый двигателем, больше момента сопротивления, ротор двигателя приобретает угловое ускорение. С ростом частоты вращения ротора увеличивается величина ЭДС вращения двигателя, и при определенном значении этой ЭДС контроллер переходит в режим управления с определением положения ротора, начинается третий этап работы.
На рис. 2 приведен алгоритм определения положения ротора.
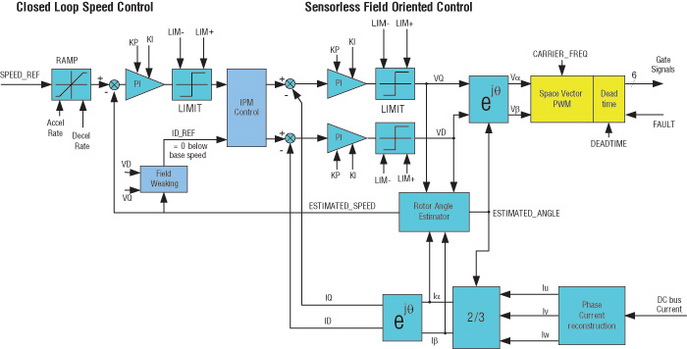
Рис. 2. Схема определения положения ротора двигателя с постоянными магнитами без датчика положения ротора
С шунта, установленного в звене постоянного тока преобразователя (DC bus current), снимается информация о токе двигателя. Система вычисления токов фаз «Phase Current reconstruction» при двух известных состояниях ключей инвертора, соответствующих двум соседним элементарным положениям вектора напряжения (рис. 3.), определяет токи в двух фазах и рассчитывает ток в третьей фазе. Далее по этим значениям токов фаз рассчитываются эквивалентные токи в двухфазной системе координат a, b.


Рис. 3. К пояснению определения положения ротора
Угловое положение ротора определяется в блоке «Rotor Angle Estimator» на основе решения уравнений электрического равновесия:
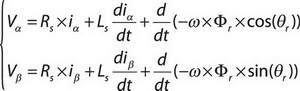
Эта система уравнений с помощью интегрирования преобразуется в систему уравнений с двумя неизвестными Fr и qr , из которой и определяется угол поворота ротора:
По найденному таким образом углу поворота ротора и имеющимся расчетным значениям напряжений по продольной и поперечной осям Vd и Vq в блоке «Space Vector PWM» формируется алгоритм переключения транзисторов инвертора. Для предотвращения короткого замыкания в стойках инвертора блок «Dead time» вводит временную задержку между сигналом на закрытие первого транзистора и открытие второго.
Помимо осуществления разгона двигателя и работы на заданной скорости у устройств на платформе iMotion имеются дополнительные функции:
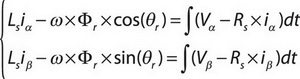
ЭДС электрической машины пропорциональна частоте вращения ротора и магнитному потоку. Для обеспечения работы двигателя на частотах вращения выше номинальной применяется алгоритм ослабления магнитного поля (field weakening — рис. 4а). Этот алгоритм заключается в целенаправленном увеличении тока по продольной оси (Id) электрической машины. ЭДС самоиндукции Es = wLdґ idнаправлена против ЭДС вращения электрической машины (Er = w ґ k ґ Fm). В результате суммарная ЭДС электрической машины снижается, и появляется возможность увеличения скорости вращения ротора. При таком способе регулирования полный ток электрической машины не должен превышать номинальный уровень. Это приводит к тому, что с ростом тока Idприходится снижать ток Iq, тем самым снижая момент, развиваемый электрической машиной (рис. 4б). Эффективность данного метода управления зависит от соотношения индуктивностей Ldи Lq и может существенно отличаться для различных исполнений электрических машин. Наиболее целесообразно применять алгоритм ослабления поля в машинах с постоянными магнитами, установленными внутри ротора, выполненного из магнитомягкого материала.
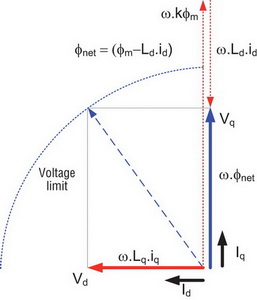

Рис. 4. Ослабление поля синхронной машины с постоянными магнитами
Еще одной важной особенностью платформы iMotion является возможность автоматического изменения угла коммутации в процессе работы. В машинах с постоянными магнитами, установленными внутри ротора (IPM), развиваемый момент складывается из двух составляющих. Первая обусловлена взаимодействием поля постоянного магнита с полем статора, вторая — различием магнитных проводимостей по продольной и поперечной осям (и, соответственно, индуктивностей Ldи Lq). На рис. 5 изображены зависимости моментов этих двух составляющих от угла рассогласования поля статора и ротора и кривые суммарного момента при разных токах. Как видно из рисунка, максимум момента при разных токах достигается при разных углах опережения. Следовательно, для достижения оптимальной работы при различных моментах нагрузки необходимо изменять угол опережения коммутации. Применение алгоритма изменения угла коммутации в платформе iMotion позволяет электроприводам работать с высокими характеристиками.
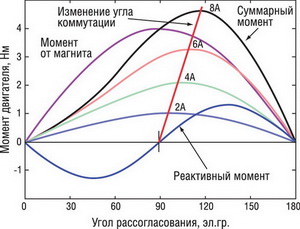
Рис. 5. Коррекция угла коммутации
Система iMotion снабжена большим количеством примеров, демонстрирующих работу с доступными операторами и функциональными блоками.
На базе платформы iMotion компания International Rectifier выпускает контроллеры для приводов различного назначения. Контроллер IRMCS3041 предназначен для управления одним синхронным двигателем с постоянными магнитами и выполнен на базе чипсета iMotion, состоящего из ИС цифрового управления IRMCF341 и силового модуля IRAMS10UP60B или IRAMS06UP60B. Основой системы является контроллер IRMCF341, содержащий все средства для точного управления синхронным двигателем на основе шины питания без использования внешних датчиков. Управление синусоидальным током обеспечивает бесшумную работу двигателя и позволяет увеличить КПД по сравнению с управлением по-средством ШИМ. Микросхема содержит входные дифференциальные усилители и 12-битный АЦП, предназначенный для снятия сигнала с цепей питания. Функционирование системы обеспе-чивается программно-аппаратным ядром с функцией контроля движения, очень простым в про-граммировании и настройке благодаря набору готовых шаблонов и примеров. Дополнительная функциональность модуля обеспечивается встроенным периферийным восьмибитным контроллером, работающим независимо от основного ядра системы. Силовой модуль IRAM содержит трех-фазный инвертор и драйвер шины питания, обеспечивающий защиту от короткого замыкания и перегрузки по току. Модуль содержит встроенные измерительные резисторы. Другой контроллер IRMCS3012 предназначен для управления двумя двигателями с постоянными магнитами и корректором коэффициента мощности, что целесообразно, например, для применения в холодильниках и кондиционерах. Контроллер IRMCS3043 предназначен для управления одним двигателем и корректором коэффициента мощности.
Работа платформы iMotion по управлению ВД была исследована в Учебно-исследовательском центре силовой и информационной электроники, созданном в МЭИ на кафедре электротехнических комплексов автономных объектов (ЭКАО) при поддержке компаний International Rectifier и КОМПЭЛ.
На рис. 6 показан контроллер IRMCS3041 в комплектации с демонстрационным синхронным двигателем с постоянными магнитами GoldenAGE, подключенный к персональному компьютеру с компьютерной средой MCEDesignerTM.
Рис. 6. Преобразователь IRMCS3041 с подключенным демонстрационным образцом двигателя
Вид окна MCEDesigner приведен на рис. 7. Подключение контроллера к компьютеру осуществляется через последовательный порт COM. Стандартная документация содержит файл конфигурации (.irc) контроллера IRMCS3041, который описывает параметры демонстрационного двигателя. Если открыть этот файл в MCEDesignerTM, то пользователю станут доступны стандартные функции: запуск и останов двигателя, вывод двигателя на заданную скорость, включение демонстрационных и тестовых режимов работы.
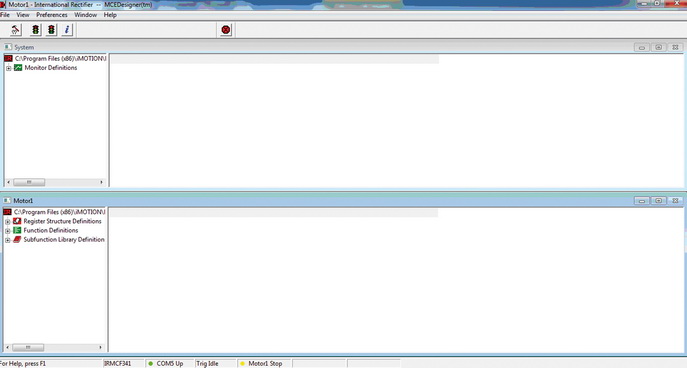
Рис. 7. Окно MCEDesigner
MCEDesignerTM позволяет отладить алгоритм работы электропривода без написания программного кода. Для этого в окне двигателя (motor1 на рис. 7) в разделе function definitions имеется возможность создания собственной функции. Функция представляет собой набор операций, которые поочередно будут выполняться на персональном компьютере, и их результаты будут переданы в память контроллера и выполнены. Функция может содержать операции записи в регистр 8051, чтение из регистра 8051, формирования временной задержки между выполнением операций и выполнения заданной ранее подфункции. Также возможно формирование циклического выполнения нескольких операций. Многие операции, такие как останов и запуск двигателя в заданном направлении, установление скорости вращения на заданном уровне и др. уже созданы разработчиками и представлены в списке подфункций. Благодаря наличию этих подфункций разработка собственной функции занимает малое время. У разработчика электропривода имеется возможность создавать свои подфункции. Это можно сделать в окне Motor1/Subfunctions library definitions. На рис. 8 представлена созданная тестовая функция, осуществляющая запуск двигателя в заданном направлении, вращение с постоянной скоростью в течение 4 секунд, разгон до большей скорости, вращение в течение 5 секунд с этой скоростью и последующий останов.
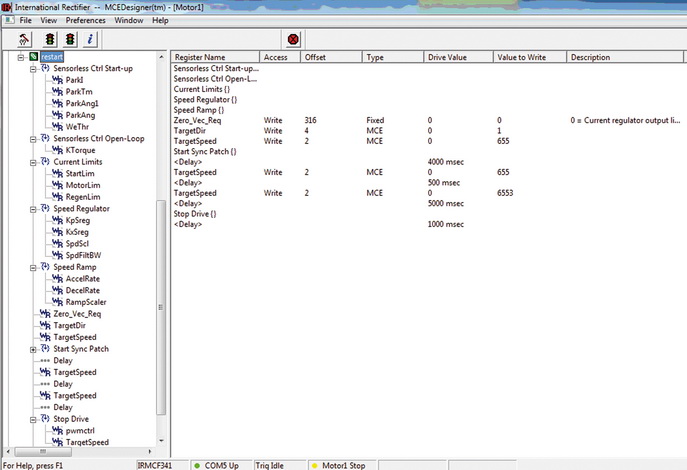
Рис. 8. Вид функции
Для изучения процессов, происходящих в электроприводе, MCEDesignerTM позволяет выводить на экран и сохранять показатели работы электропривода. Доступ к ним осуществляется из окна System/Monitor definitions. На выбор разработчику представлены заранее подготовленные пары показателей, например, токи по продольной и поперечной осям (Id & Iq). Имеется возможность самостоятельно создать группу регистрируемых параметров. Диалоговое окно приведено на рис. 9.
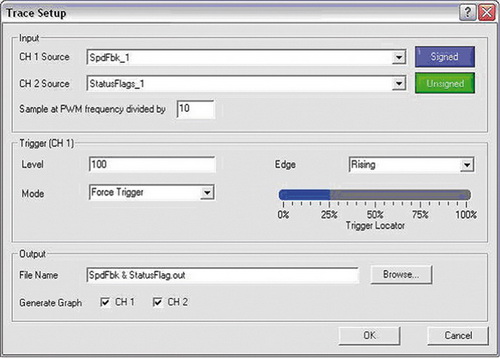
Рис. 9. Диалоговое окно создания каналов регистрации
В зоне Input выбираются каналы, регистрация которых будет производиться и частота выборки значений. В зоне Trigger выбирается и настраивается тип записи данных. Запись может производиться однократно при запуске или при достижении определенного условия, или циклически. Запись информации происходит в буфер емкостью 1024 элемента. В зоне Оutput выбирается путь к файлу, в котором будет сохраняться записанная информация. Созданная группа регистрации параметров доступна для активации в процессе работы двигателя. На рис. 10 представлены графики угла поворота ротора и тока фазы W в процессе запуска двигателя. Полученные данные можно обрабатывать как в графопостроителе MCEDesignerTM, так и в Microsoft Exсel или другой программе, обрабатывающей таблицы.
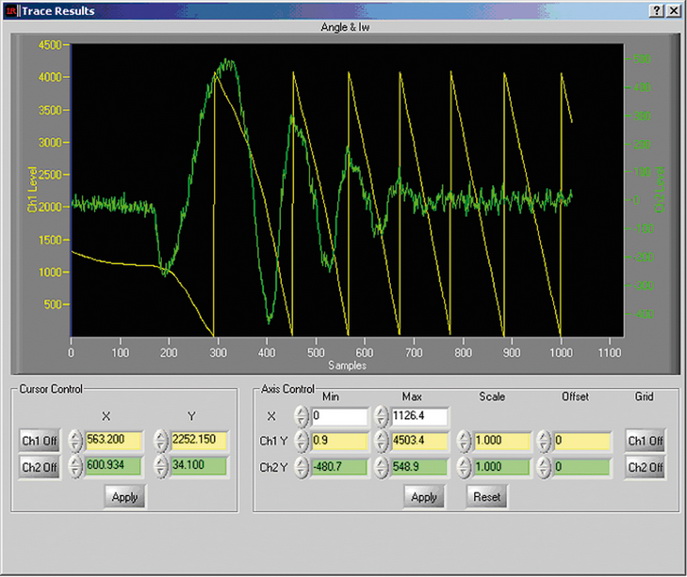
Рис. 10. Выведенные на экран каналы угла поворота ротора и тока в фазе W при разгоне двигателя
Разработку алгоритмов работы электропривода можно осуществить в Matlab Simulink. Модель содержит алгоритмы определения положения ротора двигателя с постоянными магнитами и алгоритмы управления моментом двигателя, алгоритмы контроля скорости вращения, алгоритмы ослабления поля машины, необходимые для разгона двигателя до скорости выше номинальной без превышения номинального напряжения, алгоритмы защиты и формирования сигналов ошибки.
С помощью Simulink имеется возможность изменять модель, добавляя определенные операции. На сайте International Rectifier есть программа Online MCECompiler, которая позволяет сформировать из файла модели bin-файл, который можно загрузить непосредственно в ОЗУ контроллера MCE.
Набор файлов, поставленных в комплекте с контроллером IRMCS3041, позволил быстро настроить работу идущего в комплекте синхронного двигателя GoldenAge. Однако задачей, которая была поставлена, являлось изучение работы контроллера привода со специальными двигателями, не имеющими серийных аналогов.
Первым двигателем являлся синхронный двигатель с постоянными магнитами производства одного из российских заводов (его фото приведено на рис. 11).
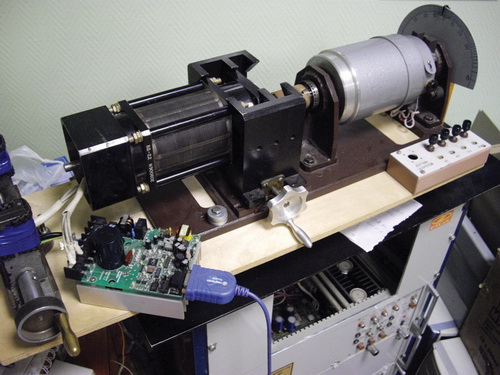
Рис. 11. Контроллер с двигателем
Для настройки электропривода на работу с двигателем должны быть определены и записаны в файл конфигурации его основные параметры. К ним относятся: число полюсов, номинальный ток и номинальная частота вращения, сопротивления фазных обмоток, индуктивности фазных обмоток для продольной и поперечной осей, момент инерции ротора, коэффициенты момента и ЭДС. При определении параметров компания-производитель допускает неточность до 10% без существенного изменения показателей в рабочем режиме. Также необходимо знать момент инерции механизма, т.к. в начальный момент времени разгон происходит в разомкнутой системе, при этом контроллер формирует ускорение, исходя из уравнения движения привода. Тут следует отметить, что момент инерции не требует такой высокой точности, как остальные параметры. В нашем случае момент инерции был задан таким же, как момент инерции «стандартного» двигателя. Параметры двигателя приведены в таблице 1.
Таблица 1. Параметры синхронного двигателя
| Номинальная скорость вращения, об/мин | 4000 |
| Индуктивность Lq, Гн | 1,5.10-3 |
| Индуктивность Ld, Гн | 1,5.10-3 |
| Сопротивление фазы, Ом | 0,7 |
| Номинальный ток, А | 4А |
| Момент инерции, кг/м | 8.10-3 |
| Коэффициент момента, Нм/А | 0,8 |
| Коэффициент ЭДС, В/1000 об/мин | 28 |
| Число полюсов | 4 |
Число полюсов, номинальный ток и номинальная частота вращения были известны. Сопротивления и индуктивности обмоток определялись с помощью мультиметра. Для определения коэффициента ЭДС двигателя его вал был соединен с валом двигателя GoldenAge. В MCEDesignerTM была составлена функция, при выполнении которой двигатель GoldenAge вращался с разными заданными скоростями в течение 10 секунд. В момент выполнения этой функции на фазных выводах испытуемого двигателя измерялась ЭДС. Коэффициент ЭДС определялся как среднее арифметическое коэффициентов, полученных для разных скоростей. Коэффициент момента не был известен, поэтому его определение было проведено по рекомендуемой International Rectifier формуле для неявнополюсных машин. После измерения параметров двигателя, они были внесены в таблицу конфигурации и импортированы в MCEDesignerTM. Для проверки соответствия конфигурации были выполнены стандартные функции: запуск двигателя, вывод на различные скорости вращения. После успешного выполнения стандартных функций была написана функция запуска двигателя и работы на нескольких скоростях вращения с выдержкой времени. Электропривод успешно выполнил эту функцию на холостом ходу и при нагрузке, создаваемой машиной постоянного тока.
После того как был получен положительный опыт работы с определением параметров двигателя и его работой в различных режимах, было принято решение приступить к настройке IRMCS3041 для запуска высокоскоростной электротурбомашины (ЭТМ), разработанной в МЭИ на каф. ЭКАО. В подшипниковых узлах разработанной машины применены лепестковые газодинамические опоры (ЛГО), во многом определяющие особенности работы ЭТМ.
На рис. 12 показан общий вид ЭТМ, а ее параметры приведены в таблице 2.

Рис. 12. Высокоскоростная электротурбомашина
Таблица 2. Параметры ЭТМ
| Номинальная частота вращения | nном | об/мин | 100 000 |
| Максимальная частота вращения | nmax | об/мин | 110 000 |
| Номинальная мощность | Р2 | Вт | 1000 |
| Характер нагрузки | центробежное колесо на валу | ||
| Тип машины | с возбуждением от постоянных магнитов | ||
| Количество полюсов | 2р | шт. | 2 |
| Номинальный момент | Mном | Нм | 0,1 |
| Номинальный ток | Iном | А | 3,3 |
| Пусковой момент (сухое трение) | Mпуск | Нм | 0,08 |
| Частота всплытия* | nвс | об/мин | 14 000 |
| Допустимый пусковой ток | Iпуск | А | 8,3 |
| Момент инерции ротора | Jр | 10-4.кг м2 | 0,305 |
| Число фаз | m | шт. | 3 |
| Схема соединения фаз | – | – | Звезда |
| Электрическое сопротивление фазы | Rф | Ом | 0,29 |
| Индуктивность фазы | Lф | мГн | 0,38 |
| Коэффициент крутящего момента | kм | Нм/А | 0,031 |
| Коэффициент фазной противо-ЭДС | kе | В/1000 об/мин | 1,08 |
| Постоянная времени нагрева | t | мин | 35 |
| М | кг | 11 | |
| * Частота всплытия соответствует образованию газового слоя в лепестковых газодинамических подшипниках и переходу от режима сухого трения к режиму газовой смазки. | |||
Особенностью ЭТМ является малая электрическая постоянная времени обмоток статора, а также повышенный момент сухого трения в опорах при малых частотах вращения. Ввиду этого при управлении ЭТМ от IRMCS3041 возникли проблемы. Они были связаны с тем, что в режиме первоначального выставления углового положения ротора или при разгоне без обратной связи в фазах электрической машины при частоте ШИМ, ограниченной настройками платформы, возникали прерывистые токи. В результате этого запуск машины оказался невозможным. Для исключения режимов прерывистых токов последовательно с каждой фазой обмотки статора были подключены дроссели. В результате токи в фазах стали непрерывными, что позволило осуществлять режим первоначального выставления положения ротора и разгон в разомкнутой системе. Но при переходе из режима разомкнутой системы в режим с контролем положения ротора проявилась еще одна особенность ЭТМ, связанная с низким коэффициентом ЭДС. При малых частотах вращения ЭДС пренебрежимо мала, и ее влияние на токи фаз ничтожно. Поэтому расчетные алгоритмы, заложенные в контроллер IRMCS3041, оказались неработоспособными. Попытка решить данную проблему путем задания повышенных значений частот вращения, на которых система переходит на работу с определением положения ротора, также не привела к успеху — в разомкнутой системе не удается разогнать ротор электрической машины до требуемой частоты.
По всей видимости, для применения контроллера IRMCS3041 при управлении высокоскоростными синхронными бездатчиковыми электродвигателями необходимо в силовой части инвертора применять транзисторные ключи с максимально высокими частотными свойствами, перестраивать контур задания частоты ШИМ, а также разработать новые алгоритмы настройки контроллера при запуске.
Указанные работы ведутся на кафедре ЭКАО МЭИ.
Перспективность системы iMotion не вызывает сомнений, т.к. примененное в ней решение позволяет существенно сократить время для расчета положения ротора синхронной машины а также снизить время на разработку программного обеспечения для контроллера электропривода. Сейчас система iMotion позволяет с легкостью работать с большинством двигателей с постоянными магнитами, как серийного, так и опытного производства.
1. Кенио Т., Нагамори С. Двигатели постоянного тока с постоянными магнитами. М.: Энергоатомиздат. 1989 г. 184 с.
2. Берелидзе В. Конфигурируемые контроллеры электропривода серии IRMCK, Новости электроники №18, 2008 г.
3. Murray A. Sensorless Motor Control Simplifies Washer Drives// Power Electronics Technology, June2006. — P.14-21.
4. Документация International Rectifier для среды MCEDesigner.
Получение технической информации, заказ образцов, поставка — e-mail: [email protected]
International Rectifier представил новые высоконадежные дискретные решения для энергоэффективных автомобильных DC/DC-приложений: AUIRS2191S — двухканальный 600-вольтовый драйвер и AUIRGP50B60PD1 — 600-вольтовый IGBT, выполненный по NPT-технологии. Данные компоненты демонстрируют исключительно высокую скорость переключения и плотность мощности, идеальным образом подходя для применения в мощных высокочастотных DC/DC-приложениях.
AUIRS2191S — двухканальный драйвер с независимым контролем верхнего и нижнего плеча в полумостовой схеме, обеспечивающий выходной ток до +3,5 А/-3,5 А с очень малым временем задержки распространения сигнала (порядка 90 нс), что позволяет формировать исключительно быстрое управление ключа по команде драйвера. Драйвер обеспечивает блокировку питания при пониженном напряжении, имеет вывод Vss (логическая земля) отдельно от СOM вывода (силовая земля) для обеспечения лучшей помехоустойчивости к переходным режимам.
AUIRGP50B60PD1 — 600-вольтовый NPT IGBT, который корпусирован совместно с 25-амперным ультрабыстрым диодом с мягким восстановлением. Прибор может работать на частотах до 150 кГц в режиме жесткого переключения, что позволяет использовать его в качестве идеальной замены MOSFET в мощных импульсных источниках питания. При изготовлении новых IGBT, сертифицированных согласно автомобильному стандарту, используется уникальный технологический процесс на тонких подложках, позволяющий получить меньшее время обеднения неосновных носителей заряда и, следовательно, более быстрое отключение транзисторов.
Пренебрежительно малые ток затухания и потери при выключении транзистора позволяют разработчикам получить более высокие рабочие частоты. AUIRGP50B60PD1 имеет высокую плотность мощности благодаря улучшенным динамическим и тепловым характеристикам.
Рубрика: новинки элементной базы Метки: IR, Контроллеры, Управление приводом
В 2015 году компания Infineon приобрела компанию International Rectifier, тем самым значительно усилив свои лидирующие позиции в области силовой электроники. ...читать далее
www.compel.ru
Изобретение относится к электротехнике и может быть использовано в нефтегазодобывающей промышленности. Техническим результатом является создание универсального способа управления вентильным электродвигателем. В способе управления вентильным электродвигателем пуск и вращение ротора электродвигателя осуществляют по сигналам ЭДС в свободных от тока секциях якорной обмотки электромеханического преобразователя. Сигналы ЭДС электромеханического преобразователя подают на нормализатор для их преобразования в дискретные сигналы логического уровня, которые поступают на входы микроконтроллера для определения по математической модели вентильного электродвигателя моментов коммутации в секциях якорной обмотки, когда он не создает номинального момента или создает тормозной момент. Микроконтроллер автоматически настраивает угол опережения коммутации на текущие значения индуктивности вентильного электродвигателя с подводящим кабелем, тока нагрузки и скорости вращения вентильного электродвигателя. В результате реализуется функция управляемого датчика положения ротора. Это приводит к повышению КПД и улучшению эксплуатационных характеристик вентильного электродвигателя и позволяет управлять вентильными индукторными электродвигателями без датчика положения ротора с хорошими эксплуатационными характеристиками. Способ особенно эффективен, где длина подводящего кабеля значительна и меняется в широких пределах, например, при нефтедобыче, бурении. 4 ил.
Изобретение относится к области электротехники и может быть использовано в нефтегазодобывающей промышленности.
Известен способ управления вентильным электродвигателем, реализованный в управляемом вентильном электродвигателе, включающий пуск электродвигателя в синхронном режиме и вращение ротора в вентильном режиме по сигналам ЭДС в свободных от тока секциях обмотки якоря (авторское свидетельство СССР 1774455, кл. Н 02 Р 6/02, 1992). Недостатком известного способа является невысокая точность определения момента коммутации силовых ключей, приводящая к снижению эксплуатационных качеств и ресурса работы электродвигателя. Наиболее близким к предлагаемому является способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций (Radim Visinka, Leos Chalupa, Ivan Skalka. "Системы управления электродвигателями на микроконтроллерах фирмы MOTOROLA". CHIP NEWS Цифровое управление электроприводом, 1999, 1, стр.15). Недостатком известного способа является отсутствие коррекции момента коммутации в зависимости от величины тока нагрузки, скорости вращения двигателя и индуктивности двигателя с подводящим кабелем в процессе работы двигателя и, как следствие, невозможность управления вентильным индукторным двигателем. Изобретение направлено на решение задачи, заключающейся в создании универсального способа управления вентильным электродвигателем. Поставленная задача решается тем, что в способе управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающем пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций, моменты коммутации смещаются относительно моментов перехода через ноль ЭДС свободных секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, при этом в качестве интегральной оценки текущих значений тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки используется время протекания тока через обратный диод трехфазного моста. При осуществлении изобретения реализуется повышение КПД двигателя за счет более точного определения момента коммутации. Изобретение поясняется чертежом, где на фиг.1 представлена функциональная схема вентильного электродвигателя; на фиг.2 функциональная схема нормализатора; на фиг.3 - диаграмма напряжений секций обмотки якоря на входе и выходе нормализатора; на фиг.4 - диаграммы ЭДС секций якорной обмотки на холостом ходу и под нагрузкой. Способ управления реализован в вентильном электродвигателе, содержащем электромеханический преобразователь энергии 1 с выполняющим функцию индуктора ротором 2 на постоянных магнитах или ротором 3 из магнитомягкого материала с обмоткой возбуждения 4. Секции якорной обмотки 5, 6, 7 электромеханического преобразователя 1 соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты 8, выполненного в виде трехфазного моста с обратными диодами, и к входам нормализатора 9. Сигналы с нормализатора поступают на микроконтроллер 10, формирующий управляющие комбинации для преобразователя частоты. Нормализатор 9 имеет входы 11, 12, 13, 14, 15, выходы 16, 17, 18, 19, 20, 21, компараторы 22, 23, 24, 25, 26, 27 и делитель 28, включающий в себя источник напряжения Е, определяющий пороги срабатывания компараторов. Способ управления вентильным электродвигателем реализован следующим образом. После пуска электродвигателя по сигналам ЭДС в свободных от тока секциях обмотки якоря микроконтроллер 10 циклично выдает управляющие комбинации, обеспечивающие 120o коммутацию ключей, на двухполупериодный преобразователь частоты 8. Ротор 2 или 3 вращается. Пусть при выдаче I-ой управляющей комбинации преобразователь частоты 8 отключает секцию 6 от "+" источника в момент времени t1 фиг.3. Нормализатор 9 преобразует напряжение секции 6 на входе 13 в напряжения логического уровня на выходах 18,19. В этих сигналах, поступающих на входы микроконтроллера 10, содержится следующая информация: - о времени Т (фиг.3) - время протекания тока в прежнем направлении под действием ЭДС самоиндукции через обратный диод преобразователя частоты 8; - о моменте времени t2 (фиг.3) - момент перехода через ноль ЭДС секции, отключенной от источника. На фиг. 4 представлены диаграммы ЭДС секций 5, 6, 7, якорной обмотки на холостом ходу и при нагрузке под действием реакции якоря. Из диаграмм следует, что в зависимости от величин тока нагрузки, скорости и индуктивности необходимо смещение момента коммутации секций 5, 6, 7 якорной обмотки относительно перехода через ноль ЭДС свободных секций, определяемое математической моделью данного типа электродвигателя, что не учитывается в известных способах управления. Это приводит к протеканию тока в секциях обмотки якоря, когда он не создает номинальный момент или создает тормозной. Микроконтроллер 10 вычисляет момент подключения секции 6 к "-" источника питания (момент выдачи I+1-ой комбинации), используя время между моментами t2, перехода ЭДС секций, отключенных от источника через "0". Для учета реакции якоря при определении моментов коммутации используется время Т. Для этого вычисленный момент смещается на величину, пропорциональную времени Т. Применение описанного способа позволяет исключить протекание тока в секциях якорной обмотки, когда он не создает номинального момента или создает тормозной момент. Т.е. микроконтроллер автоматически настраивает смещение момента коммутации на текущие значения индуктивности двигателя с подводящим кабелем, тока нагрузки и скорости вращения двигателя. Это приводит к повышению КПД, улучшению эксплуатационных характеристик вентильных двигателей и делает возможным управление вентильными индукторными двигателями без установки датчика положения ротора с хорошими эксплуатационными характеристиками. Этот метод особенно эффективен в системах, где длина подводящего кабеля значительна и меняется в широких пределах, например в нефтедобыче, бурении.Формула изобретения
Способ управления вентильным электродвигателем, секции якорной обмотки которого соединены в "звезду" и подключены к выходам двухполупериодного преобразователя частоты в виде трехфазного моста с обратными диодами, включающий пуск и вращение ротора по сигналам ЭДС в свободных от тока секциях обмотки якоря, преобразование сигналов ЭДС нормализатором в дискретные сигналы логического уровня, поступление дискретных сигналов на входы микроконтроллера, определение микроконтроллером по математической модели данного типа электродвигателя моментов коммутации секций обмотки якоря относительно моментов перехода через ноль ЭДС свободных секций, отличающийся тем, что моменты коммутации смещаются относительно моментов перехода через ноль ЭДС свободных секций в зависимости от величин тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки, при этом в качестве интегральной оценки текущих значений тока нагрузки, скорости вращения ротора и индуктивности секций якорной обмотки используется время протекания тока через обратный диод трехфазного моста.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4www.findpatent.ru
 Рис. 1. Принцип работы трёхфазного вентильного двигателя
Рис. 1. Принцип работы трёхфазного вентильного двигателя Вентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора[1].
Механическая и регулировочная характеристики вентильного двигателя линейны и идентичны механической и регулировочной характеристикам электродвигателя постоянного тока. Как и электродвигатели постоянного тока, вентильные двигатели работают от сети постоянного тока. ВД можно рассматривать как двигатель постоянного тока, в котором щёточно-коллекторный узел заменён электроникой, что подчёркивается словом «вентильный», то есть «управляемый силовыми ключами» (вентилями). Фазные токи вентильного двигателя имеют синусоидальную форму. Как правило, в качестве усилителя мощности применяется автономный инвертор напряжения с широтно-импульсной модуляцией (ШИМ).
Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре и характеризуется прямоугольной формой фазных напряжений. Структура БДПТ проще чем структура ВД (отсутствует преобразователь координат, вместо ШИМ используется 120- или 180-градусная коммутация, реализация которой проще ШИМ).
В русскоязычной литературе двигатель называют вентильным, если противо-ЭДС управляемой синхронной машины синусоидальная, а бесконтактным двигателем постоянного тока, если противо-ЭДС (англ.) трапецеидальная.
В англоязычной литературе такие двигатели обычно не рассматриваются отдельно от электропривода и упоминаются под аббревиатурами PMSM (Permanent Magnet Synchronous Motor) или BLDC (Brushless Direct Current Motor). Стоит отметить, что аббревиатура PMSM в англоязычной литературе чаще используется для обозначения самих синхронных машин с постоянными магнитами и с синусоидальной формой фазных противо-ЭДС, в то время как аббревиатура BLDC аналогична русской аббревиатуре БДПТ и относится к двигателям с трапецеидальной формой противо-ЭДС (если иная форма не оговорена специально).
Вообще говоря, вентильный двигатель не является электрической машиной в традиционном понимании, поскольку его проблематика затрагивает ряд вопросов, связанных с теорией электропривода и систем автоматического управления: структурная организация, использование датчиков и электронных компонентов, а также программное обеспечение.
Вентильные двигатели, сочетающие в себе надёжность машин переменного тока с хорошей управляемостью машин постоянного тока, являются альтернативой двигателям постоянного тока, которые характеризуются рядом изъянов, связанных со ЩКУ, таких как искрение, помехи, износ щёток, плохой теплоотвод якоря и пр. Отсутствие ЩКУ позволяет применять ВД в тех приложениях, где использование ДПТ затруднено или невозможно.
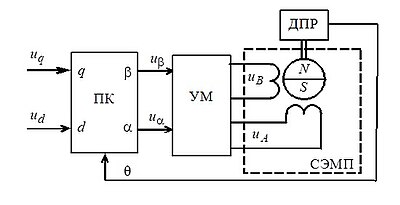 Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности, СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе. ПК — преобразователь координат, УМ — усилитель мощности, СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора. Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока uq{\displaystyle u_{q}}, действие которого аналогично напряжению якоря двигателя постоянного тока, и ud{\displaystyle u_{d}}, аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы ud,uq{\displaystyle u_{d},u_{q}}, представляют собой проекции вектора напряжения управления Uy→={ud,uq}{\displaystyle {\vec {U_{y}}}=\{u_{d},u_{q}\}} на оси вращающейся системы координат {d,q}{\displaystyle \{d,q\}}, связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций ud,uq{\displaystyle u_{d},u_{q}} в проекции uα,uβ{\displaystyle u_{\alpha },u_{\beta }} неподвижной системы координат {α,β}{\displaystyle \{\alpha ,\beta \}}, связанной со статором.
Как правило, в системах управления электропривода задаётся ud=0{\displaystyle u_{d}=0}[3], при этом уравнения преобразования координат принимают вид[4]:
uα=−uq⋅sinθ,{\displaystyle u_{\alpha }=-u_{q}\cdot \sin {\theta },}
uβ={\displaystyle u_{\beta }=} uq⋅cosθ,{\displaystyle u_{q}\cdot \cos {\theta },}
где θ{\displaystyle \theta } — угол поворота ротора (и системы вращающихся координат) относительно оси α{\displaystyle \alpha } неподвижной системы координат. Для измерения мгновенного значения угла θ{\displaystyle \theta } на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, uq{\displaystyle u_{q}} является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала uq{\displaystyle u_{q}}, формирует гармонические сигналы uα,uβ{\displaystyle u_{\alpha },u_{\beta }}, которые усилитель мощности (УМ) преобразует в фазные напряжения uA,uB{\displaystyle u_{A},u_{B}}. Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Вентильные двигатели призваны объединить в себе лучшие качества двигателей переменного тока и двигателей постоянного тока. Это обусловливает их достоинства.
Достоинства:
Вентильные двигатели характеризуются и некоторыми недостатками, главный из которых — высокая стоимость. Однако, говоря о высокой стоимости, следует учитывать и тот факт, что вентильные двигатели обычно используются в дорогостоящих системах с повышенными требованиями по точности и надёжности.
Недостатки:
Конструктивно современные вентильные привода состоят из электромеханической части (синхронной машины и датчика положения ротора) и из управляющей части (микроконтроллер и силовой мост).
Упоминая о конструкции ВД, полезно иметь в виду и неконструктивный элемент системы — программу (логику) управления.
Синхронная машина, используемая в ВД, состоит из шихтованного (собранного из отдельных электрически изолированных листов электротехнической стали — для снижения вихревых токов) статора, в котором расположена многофазная (обычно двух- или трёхфазная) обмотка, и ротора (обычно на постоянных магнитах).
В качестве датчиков положения ротора в БДПТ применяются датчики Холла, а в ВД — вращающиеся трансформаторы и накапливающие датчики. В т. н. «бездатчиковых» системах информация о положении определяется системой управления по мгновенным значениям фазных токов.
Информация о положении ротора обрабатывается микропроцессором, который, согласно программе управления, вырабатывает управляющие ШИМ-сигналы. Низковольтные ШИМ-сигналы микроконтроллера затем преобразуются усилителем мощности (обычно транзисторным мостом) в силовые напряжения, подаваемые на двигатель.
Совокупность датчика положения ротора и электронного узла в ВД и БДПТ можно с определённой долей достоверности сравнить с щёточно-коллекторным узлом ДПТ. Однако следует помнить, что двигатели редко применяются вне электропривода. Таким образом, электронная аппаратура характерна для ВД почти в той же степени, что и для ДПТ.
Статор имеет традиционную конструкцию. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Обмотка разбита на фазы, которые уложены в пазы таким образом, что пространственно сдвинуты друг относительно друга на угол, определяемый числом фаз. Известно, что для равномерного вращения вала двигателя машины переменного тока достаточно двух фаз. Обычно синхронные машины, применяемые в ВД, трёхфазные, однако встречаются также и ВД с четырёх- и шестифазными обмотками.
По расположению ротора вентильные двигатели делятся на внутрироторные (англ. inrunner) и внешнероторные (англ. outrunner).
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до шестнадцати пар полюсов с чередованием северного и южного полюсов.
Для изготовления ротора раньше использовались ферритовые магниты, что определялось их распространённостью и дешевизной. Однако такие магниты характеризуются низким уровнем магнитной индукции. В настоящее время интенсивно используются магниты из сплавов редкоземельных элементов, поскольку они позволяют получить более высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрическом, индуктивном, трансформаторном, на эффекте Холла и проч. Наибольшую популярность приобрели датчики Холла и фотоэлектрические датчики, обладающие низкой инерционностью и обеспечивающие малые запаздывания в канале обратной связи по положению ротора.
Обычно фотоэлектрический датчик содержит три неподвижных фотоприёмника, между которыми находится вращающаяся маска с рисками, жёстко закреплённая на валу ротора ВД. Таким образом, ДПР обеспечивает информацию о текущем положении ротора ВД для системы управления.
Система управления содержит микроконтроллер, контролирующий силовой инвертор согласно заданной программе управления. В качестве силовых ключей инвертора обычно применяют транзисторы MOSFET (ВД малых и средних мощностей) или IGBT (ВД средних и больших мощностей), реже тиристоры.
Основываясь на информации, полученной от ДПР, микроконтроллер формирует ШИМ-сигналы, которые усиливаются инвертором и подаются на обмотку синхронной машины.
Благодаря высокой надёжности и хорошей управляемости, вентильные двигатели применяются в широком спектре приложений: от компьютерных вентиляторов и CD/DVD-приводов до роботов и космических ракет.
Широкое применение ВД нашли в промышленности, особенно в системах регулирования скорости с большим диапазоном и высоким темпом пусков, остановок и реверса; авиационной технике, автомобильном машиностроении, биомедицинской аппаратуре, бытовой технике и пр. Также, этот тип двигателей часто используется в двигателях квадрокоптеров.
www.gpedia.com
Изобретение относится к области электротехники и может быть использовано в системе с вентильным двигателем для формирования управляющих сигналов в системе. Техническим результатом является получение характеристик вентильного двигателя, тождественных характеристикам коллекторного двигателя постоянного тока путем аналитического конструирования оптимального по точности регулятора скорости вращения вентильного двигателя. В способе управления при преобразовании угла поворота вала синхронного двигателя в трехфазный демодулированный электрический сигнал датчика положения ротора двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания синхронного двигателя, среднее значение которого изменяют по синусоидальному закону, трехфазное напряжение питания формируют из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя. Сигнал управления формируют из разности сигнала задания по скорости и сигнала обратной связи по скорости. Следящая система с вентильным двигателем содержит последовательно соединенные модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, трехфазный сумматор, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя, трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя, датчик скорости синхронного двигателя, ротор которого механически соединен с валом синхронного двигателя, сумматор, выход которого соединен с входом модулятора, а первый суммирующий вход сумматора является входом управления вентильного двигателя по скорости. Второй вычитающий вход сумматора соединен с выходом датчика скорости синхронного двигателя. 2 н.п. ф-лы, 1 ил.
Изобретение относится к управляемым электрическим двигателям, в частности к классу вентильных двигателей (бесколлекторных двигателей постоянного тока - БДПТ), и может найти применение вместо коллекторного двигателя постоянного тока, например, в следящих системах автоматического управления и регулирования.
Известны способы управления вентильным двигателем, основанные на преобразовании угла поворота вала синхронного двигателя в трехфазный электрический сигнал датчика положения ротора двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания двигателя, среднее значение которого изменяется по синусоидальному закону [В.А.Головацкий и др. Устройство управления бесколлекторным двигателем постоянного тока на силовых схемах. В кн. Электронная техника в автоматике. Сборник статей под ред. Ю.И.Конева. Выпуск 4. М., 1973, стр.34-37].
Такой способ управления позволяет устранить указанные недостатки, обеспечивая плавное и широкое регулирование скорости вентильного двигателя, малые пульсации момента и высокий к.п.д. Однако статические и динамические характеристики вентильного двигателя при таком способе управления существенно отличаются от характеристик коллекторного двигателя постоянного тока [В.Н.Крывой и др. Бесконтактные электродвигатели постоянного тока. Информэлектро. М., 1970, стр.5-8], что является недостатком известного способа.
Из известных способов управления вентильным двигателем наиболее близким по технической сущности является способ, который выбран в качестве прототипа для заявляемого способа. Данный способ заключается в том, что при преобразовании угла поворота вала синхронного двигателя в трехфазный демодулированный электрический сигнал датчика положения ротора синхронного двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания синхронного двигателя, среднее значение которого изменяют по синусоидальному закону, трехфазное напряжение питания синхронного двигателя формируется из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя [Патент №2354036. Сухинин Б.В., Сурков В.В., Егоров А.Ю., Домнин А.Н., Сурков А.В. Способ управления вентильным двигателем и следящая система для его осуществления].
Такой способ управления позволяет обеспечить плавное и широкое регулирование скорости вентильного двигателя, малые пульсации момента и высокий к.п.д. Статические и динамические характеристики при таком способе управления полностью аналогичны статическим и динамическим характеристикам коллекторного двигателя постоянного тока. Однако при таком способе управления скорость вращения вала вентильного двигателя отрабатывается не оптимально по точности.
Известны схемы вентильных двигателей, содержащие трехфазный синхронный двигатель, подключенный к выходу трехфазного преобразователя, среднее значение выходного напряжения которого изменяется по синусоидальному закону, трехфазный датчик положения ротора синхронного двигателя, обмотка возбуждения которого соединена с выходом модулятора, на вход модулятора подается напряжение управления, выход трехфазного датчика положения ротора синхронного двигателя подключен к входу трехфазного демодулятора, а выход трехфазного демодулятора соединен со входом трехфазного преобразователя [В.А.Головацкий и др. Устройство управления бесколлекторным двигателем постоянного тока на силовых схемах. В кн. Электронная техника в автоматике. Сборник статей под ред. Ю.И.Конева. Выпуск 4. М., 1973, стр.34-37].
Такой вентильный двигатель позволяет устранить указанные недостатки и обеспечить плавное и широкое регулирование скорости, малые пульсации момента и высокий к.п.д. Однако его статические и динамические характеристики при такой известной схеме существенно отличаются от характеристик коллекторного двигателя постоянного тока [В.Н.Крывой и др. Бесконтактные электродвигатели постоянного тока. Информэлектро. М., 1970, стр.5-8], что является недостатком известного вентильного двигателя.
Из известных вентильных двигателей наиболее близким по технической сущности является вентильный двигатель, который выбран в качестве прототипа для заявляемого устройства. Следящая система содержит последовательно соединенные модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, трехфазный преобразователь, трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя, так же трехфазное реле, трехфазный датчик тока синхронного двигателя и трехфазный сумматор, суммирующий вход которого соединен с выходом трехфазного демодулятора, а вычитающий вход с выходом трехфазного датчика тока синхронного двигателя, выход трехфазного сумматора соединен с входом трехфазного реле, выход трехфазного реле соединен с входом трехфазного преобразователя, выход которого соединен с токовым входом трехфазного датчика тока, а токовый выход трехфазного датчика тока соединен с синхронным двигателем [Патент №2354036. Сухинин Б.В., Сурков В.В., Егоров А.Ю., Домнин А.Н., Сурков А.В. Способ управления вентильным двигателем и следящая система для его осуществления].
Такой вентильный двигатель позволяет обеспечить плавное и широкое регулирование скорости вращения вала, малые пульсации момента и высокий к.п.д. Статические и динамические характеристики при такой схеме управления полностью аналогичны статическим и динамическим характеристикам коллекторного двигателя постоянного тока. Однако недостатком при такой схеме управления является то, что скорость вращения вала вентильного двигателя отрабатывается не оптимально по точности.
Задачей настоящего изобретения является получение характеристик вентильного двигателя, тождественных характеристикам коллекторного двигателя постоянного тока, путем аналитического конструирования оптимального по точности регулятора скорости вращения вентильного двигателя.
Данная задача решается тем, что в известном способе управления вентильным двигателем, основанным на преобразовании угла поворота вала синхронного двигателя в трехфазный демодулированный электрический сигнал датчика положения ротора синхронного двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания синхронного двигателя, среднее значение которого изменяют по синусоидальному закону, трехфазное напряжение питания формируют из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя, причем сигнал управления формируют из разности сигнала задания по скорости и сигнала обратной связи по скорости.
Данный способ может быть использован в любой следящей системе с вентильным двигателем вместо коллекторного двигателя постоянного тока.
Для пояснения способа воспользуемся уравнениями Горева-Парка в координатах d, q [А.А.Горев. Переходные процессы синхронной машины. М.: ГЭИ, 1950] для синхронного двигателя при токе возбуждения If=const:

где υ - угол поворота ротора синхронного двигателя, υ=∫ωdt+υ0,
ρ=120° - угол сдвига осей фазных обмоток относительно друг друга,
R - активное сопротивление обмотки статора двигателя,
L - коэффициент индукции по продольной оси двигателя,
λ - коэффициент явнополюсности,
J - момент инерции вращающихся масс,
М - коэффициент взаимоиндукции между обмотками статора и ротора,
mэм - электромагнитный момент вращения вала двигателя,
mн - момент нагрузки на валу двигателя.
Из уравнений (1) следует, что синхронный двигатель представляет собой объект регулирования с двумя управляющими воздействиями: ud и uq. Воспользовавшись теорией аналитического конструирования регуляторов А.А.Красовского [Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 558 с.] или более простой в использовании, изложенной в [В.В.Сурков, Б.В.Сухинин и др. Аналитическое конструирование оптимальных регуляторов по критериям точности, быстродействию, энергосбережению. - Тула: Изд-во ТулГУ, 2005. - 300 с.], запишем оптимальный по точности и одновременно оптимальный по быстродействию закон управления для регулятора тока id и оптимальный по точности закон управления для регулятора скорости ω при mн=0 и θ=0:


где Um - напряжение питания преобразователя, uqзад=uωзад-k2·ω,  ,
,  ;
;
idзад, ωзад или udзад=k2·k·idзад, uωзад=k2·ωзад - заданные значения сигналов управления для регулятора тока id и ω соответственно;
k2 - коэффициент пропорциональности, k2>0, [k2]=В·с.
Переменные в координатах d, q выражаются через переменные в реальных координатах А, В, С посредством соотношений (2), (3). Например, фиктивным токам id, iq соответствуют реальные фазные токи iA, iB, iC.
Воспользовавшись соотношениями (2), (3), найдем, что разностям udзад-k2·k·id и uqзад-k2·k·iq соответствуют разности uАзад-k2·k·iA, uВзад-k2·k·iB, uСзад-k2·k·iC каждой фазы двигателя и оптимальным управлениям (4), (5) в координатах d, q соответствуют фазные управления



Здесь

Из формул (6)-(8) следует, что рассматриваемый способ требует трехфазного реле, трехфазного датчика тока двигателя и трехфазного задатчика напряжения (датчика положения ротора), с помощью которого формируется сигнал оптимального по точности управления скоростью вентильного двигателя.
Предлагаемый способ реализуется в следящей системе с вентильным двигателем, содержащей последовательно соединенные модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, трехфазный сумматор, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя, трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя. Суммирующий вход трехфазного сумматора соединен с выходом трехфазного демодулятора, а вычитающий вход с выходом трехфазного датчика тока синхронного двигателя, выход трехфазного сумматора соединен с входом трехфазного реле, выход трехфазного реле соединен с входом трехфазного преобразователя, выход которого соединен с токовым входом трехфазного датчика тока синхронного двигателя, а токовый выход трехфазного датчика тока синхронного двигателя соединен с синхронным двигателем. В следящую систему дополнительно введены датчик скорости синхронного двигателя, ротор которого механически соединен с валом синхронного двигателя, и сумматор. Вход модулятора соединен с выходом сумматора, вычитающий вход которого соединен с выходом датчика скорости синхронного двигателя, а суммирующий вход является входом управления вентильного двигателя по скорости.
Сущность изобретения поясняется чертежом, где представлена структурная схема следящей системы, реализующей способ оптимального по точности управления скоростью вентильного двигателя.
Система содержит последовательно соединенные суммирующий вход сумматора 1, модулятор 2, выход которого соединен со входом трехфазного датчика положения ротора синхронного двигателя 3, сигнал с которого поступает на трехфазный демодулятор 4, выход трехфазного демодулятора соединен с первым суммирующим входом трехфазного сумматора 5, результирующий сигнал с выхода трехфазного сумматора 5 поступает на трехфазное реле 6, выход трехфазного реле 6 подключен ко входу трехфазного преобразователя 7, выход трехфазного преобразователя 7 соединен со входом трехфазного датчика тока синхронного двигателя 8, его токовый выход соединен со входом трехфазного синхронного двигателя 9, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя 3 и с валом датчика скорости синхронного двигателя 10, второй вычитающий вход трехфазного сумматора 5 соединен с выходом трехфазного датчика тока синхронного двигателя 8, выход датчика скорости синхронного двигателя 10 соединен с вторым вычитающим входом сумматора 1.
Система работает следующим образом. Напряжение задания по скорости Uωзад - сигнал управления подается на первый суммирующий вход сумматора 1, на второй вычитающий вход сумматора 1 подается напряжение, пропорциональное скорости вращения датчика синхронного двигателя k2·ω, например, тахогенератора 10, ротор которого механически соединен с ротором трехфазного синхронного двигателя 9. На выходе сумматора 1 появляется напряжение Uвх=Uωзад-k2·ω, которое преобразуется модулятором 2 в напряжение прямоугольной формы повышенной частоты 500-20000 Гц с амплитудным значением, равным Uвx, и подается на обмотку возбуждения датчика положения ротора синхронного двигателя 3, например, сельсина, ротор которого механически соединен с ротором трехфазного синхронного двигателя 9. Сигнал с обмоток синхронизации сельсина подается на вход трехфазного демодулятора 4, на выходе которого появляется напряжение задания на оптимальный регулятор:

где k1 - общий коэффициент преобразования модулятора, датчика положения ротора синхронного двигателя и демодулятора, k1=1;
υ - угол поворота ротора синхронного двигателя, υ=∫ωdt+υ0;
ω - скорость вращения ротора синхронного двигателя;
θ - угол установки датчика положения ротора синхронного двигателя относительно ротора синхронного двигателя.
Посредством трехфазного сумматора 5 из трехфазного напряжения (10) с выхода демодулятора 4 вычитается трехфазное напряжение, получаемое от трехфазного датчика тока 8, и подается на вход трехфазного реле 6, выходной сигнал которого подается на вход трехфазного преобразователя 7, на выходе трехфазного преобразователя 7 появляется трехфазное напряжение uA, uB, uC, изменяющееся в соответствии с оптимальным законом управления (6)-(9). В качестве трехфазного преобразователя в схеме используется, например, трехфазный мост из шести транзисторов или тиристоров, которые работают в ключевом режиме.
Воспользовавшись соотношениями (2), (3), (9), найдем udзад и uqзад регуляторов (4) и (5), соответствующие заданиям (10):


При этом оптимальные управления (4), (5) примут вид:


Из (13) следует, что при установке датчика положения ротора 3 в нулевое положение θ=0 регулятор тока id стабилизирует ток id на нулевом уровне оптимально по быстродействию и поддерживает его оптимально по точности так, что id=0. При этом уравнения (6)-(8) с учетом (9), (10) при θ=0 приводятся к виду:
По уравнениям (15) построена структурная схема (см. чертеж).
Уравнения (1) с учетом (13), (14) при θ=0 и k1=1 преобразуются к виду:

Полученные уравнения приводят к следующим выводам. Во-первых, дифференциальные уравнения (16) полностью аналогичны дифференциальным уравнениям коллекторного двигателя постоянного тока. Следовательно, и статические и динамические характеристики при управлении вентильным двигателем по предлагаемому способу полностью аналогичны статическим и динамическим характеристикам коллекторного двигателя постоянного тока. Во-вторых, из уравнения (17) следует, что при таком способе управления вентильным двигателем он приобретает дополнительно свойства оптимального по точности отработки скорости вращения.
Точность работы современных систем автоматического регулирования обычно ограничивается ошибкой системы. Предлагаемый способ позволяет теоретически свести ошибку систем автоматического регулирования к нулю.
Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
1. Способ управления вентильным двигателем, основанный на преобразовании угла поворота вала синхронного двигателя в трехфазный демодулированный электрический сигнал датчика положения ротора синхронного двигателя, амплитуда которого пропорциональна сигналу управления, и формировании из него трехфазного напряжения питания синхронного двигателя, среднее значение которого изменяют по синусоидальному закону, трехфазное напряжение питания формируют из знака разности сигнала трехфазного датчика положения ротора синхронного двигателя и сигнала трехфазного датчика тока синхронного двигателя, отличающийся тем, что сигнал управления формируют из разности сигнала задания по скорости и сигнала обратной связи по скорости.
2. Следящая система с вентильным двигателем, содержащая последовательно соединенные модулятор, трехфазный датчик положения ротора синхронного двигателя, трехфазный демодулятор, трехфазный сумматор, трехфазное реле, трехфазный преобразователь, трехфазный датчик тока синхронного двигателя, трехфазный синхронный двигатель, ротор которого механически соединен с валом трехфазного датчика положения ротора синхронного двигателя, отличающаяся тем, что в нее дополнительно введены датчик скорости синхронного двигателя, ротор которого механически соединен с валом синхронного двигателя, сумматор, выход которого соединен с входом модулятора, а первый суммирующий вход сумматора является входом управления вентильного двигателя по скорости, а второй вычитающий вход сумматора соединен с выходом датчика скорости синхронного двигателя.
www.findpatent.ru