





 Каждый радиолюбитель сталкивался с проблемой управления шаговым двигателем, реле и прочими видами достаточно мощных нагрузок, строя при этом «бородатые» схемы сопряжения с логикой. Но все это в прошлом, потому что компания STMicroelectronics выпустила достаточно мощный коммутатор, который позволяет выполнять все задуманное, не опасаясь за полное отсутствие места в корпусе или постоянно выходящие из строя выходные транзисторы.
Каждый радиолюбитель сталкивался с проблемой управления шаговым двигателем, реле и прочими видами достаточно мощных нагрузок, строя при этом «бородатые» схемы сопряжения с логикой. Но все это в прошлом, потому что компания STMicroelectronics выпустила достаточно мощный коммутатор, который позволяет выполнять все задуманное, не опасаясь за полное отсутствие места в корпусе или постоянно выходящие из строя выходные транзисторы.
Интегральная схема позволяет без проектирования лишних схем и паразитных соединений минимизировать количество используемых деталей в готовом конструктивном решении. Потому что она представляет собой набор коммутаторов, построенный на биполярных транзисторах составного типа Дарлингтона.
Здесь видно соединение по привычной нам схеме усилителя эмиттерного повторителя. Из числа компонентов наблюдаются:
Мощные выходные транзисторы и наличие большого количества раздельных каналов управления позволяет использовать ее для управления шаговым двигателем. Также она применяется в релейных схемах, где может быть использован обычный двигатель, управляемый посредством коммутации выходных ключей, переключающих корректирующие цепи.
 Как показывает практика использования представленной микросхемы, она является достаточно мощной, потому что судя по datasheet uln2003ag технические характеристики позволяют коммутировать достаточно большой ток до 500 мА. Но не стоит давать работать ей на пределе, потому что выходной транзистор хоть и защищен обратным диодом, он может пострадать из-за банального перегрева.
Как показывает практика использования представленной микросхемы, она является достаточно мощной, потому что судя по datasheet uln2003ag технические характеристики позволяют коммутировать достаточно большой ток до 500 мА. Но не стоит давать работать ей на пределе, потому что выходной транзистор хоть и защищен обратным диодом, он может пострадать из-за банального перегрева.
Чтобы этого не происходило, правильно подходите к расчету потребляемой и рассеиваемой мощности. В данном случае при максимальном напряжении на CE равном 50 В максимальная мощность выходного транзистора составит не более 25 Вт, при этом он будет очень сильно греться. Поэтому номинальный коммутационный ток лучше поддерживать не более 300-400 мА. В таком режиме микросхема будет работать долго и стабильно.
Структурная схема микросхемы до боли проста и состоит всего из 7 ячеек стандартной ТТЛ-логики И-НЕ с подключенным обратным диодом на общий вывод питания COM . С топологией устройства также все просто, каждый вход расположен напротив выхода, что не даст спутать выводы при проектировании каких-либо устройств. Главное запомнить, что первый вывод является прямым входом.
Что касается характеристик, то они представлены для микросхем с ТТЛ-логикой, при котором управляющий сигнал не превышает 5 В. Но также выпускаются аналоги КМОП, которые могут работать от более низкого порога около 2 В до 9 В.
Как и любая друга, микросхема uln 2003 аналоги имеет как среди импортных, так и отечественных производителей. Например, самым популярным из них является ключ К1109КТ22, ITT 656, L 203, M 2003 P , NE 5603 N и другие. Выбирая аналог к этой микросхеме, необходимо обращать внимание на топологию. Если этот ТТЛ-логика, то и входное напряжение должно быть не более 5 В. Все представленные аналоги этого устройства имеют то же техническое исполнение и конструктив, поэтому могут быть заменены без внесения каких-либо изменений в схему.
 На uln 2003 схема подключения до боли проста и не включает никаких компонентов. Главное, не перепутать вход с выходом и общий вывод, в остальном все и так ясно. Но все же для наглядности стоит повторить схему на примере с шаговым двигателем с питанием от 12 до 24 В. Общий провод от +24В подключается на 9 вывод и к центральному отводу обмоток двигателя, все остальные оп порядку согласно полюсам. Управление двигателем осуществляется по аналогичным линиям, только со входа МС.
На uln 2003 схема подключения до боли проста и не включает никаких компонентов. Главное, не перепутать вход с выходом и общий вывод, в остальном все и так ясно. Но все же для наглядности стоит повторить схему на примере с шаговым двигателем с питанием от 12 до 24 В. Общий провод от +24В подключается на 9 вывод и к центральному отводу обмоток двигателя, все остальные оп порядку согласно полюсам. Управление двигателем осуществляется по аналогичным линиям, только со входа МС.
При работе в таком режиме вероятность спалить выходной транзистор достаточно большая, потому что короткое замыкание в двигателе никто еще не отменял, точно также, как и клин ротора, из-за чего ток может существенно возрасти. Поэтому в каждую линию управления по выходу можно поставить шунт и обрисовать его схемой защиты от КЗ. Это зависит от конкретной задачи и типа устройства, в котором эта микросхема применяется.
При разработке схем с участием представленной микросхемы необходимо учитывать порог регулирования тока, который зависит нелинейной характеристикой от входного напряжения:
Также в устройстве присутствует паразитная емкость, которая может достигать 25 pF в зависимости от частоты управляющего напряжения или создаваемых помех в непосредственной близости от нее. При этом минимальный порог паразитной емкости находиться на уровне 15 пФ. Что касается времени включения выходных транзисторов, то они являются достаточно быстрыми. Время перехода из одного состояния в другое лежит в пределах от 0,25 до 1 мкс, что говорит о возможности работы на достаточно высоких частотах.
Исходя из описания на микросхему, максимальный ток составляет 0,5 А, но в таком режиме она существенно нагревается до 70 и более градусов, что может быть критичным. Ведь максимальная температура, при которой микросхема еще нормально работает, составляет порядка 85 градусов. Также следует отметить, что максимальный входной ток управления при напряжении 3,85 В не должен превышать 1,35 мА. А это немаловажный факт, потому что именно по входу у многих схемотехников она выходит из строя.
На следующих диаграммах показана зависимость входного и выходного токов, которая является практически линейной, что позволяет более качественно подобрать элементы схемы, обеспечив нормальный температурный режим для стабильной работы устройства. Более подробно узнать о свойствах микросхемы можно из datasheet, который можно скачать на сайте.
 Сфера применения микросхемы uln 2003 достаточно широкая и охватывает как промышленность, так и детские игрушки с целью развлечения. Например, ее можно применить в устройстве переключения бегущих огней, собранных на мощных светодиодах или даже лампочках с общим питание не более 50 В. U ln2003 биполярный шаговый двигатель может вращать, потому что у нее достаточно выводов, чтобы выполнить целый оборот с позиционированием. Как пример, можно организовать управление вентиляторным шаговым двигателем посредством параллельного порта, собрав небольшую схему с подключением к цифровым выходам интерфейса из линии DATA .
Сфера применения микросхемы uln 2003 достаточно широкая и охватывает как промышленность, так и детские игрушки с целью развлечения. Например, ее можно применить в устройстве переключения бегущих огней, собранных на мощных светодиодах или даже лампочках с общим питание не более 50 В. U ln2003 биполярный шаговый двигатель может вращать, потому что у нее достаточно выводов, чтобы выполнить целый оборот с позиционированием. Как пример, можно организовать управление вентиляторным шаговым двигателем посредством параллельного порта, собрав небольшую схему с подключением к цифровым выходам интерфейса из линии DATA .
А если использовать в составе с микроконтроллером, то можно организовать полноценное управление релейной схемой с током потребления по каждому из каналов не более 300 мА.
Обычно на руках у радиолюбителя всяческие микросхемы появляются из других устройств, которые были разобраны очень давно, и уже нет никакой информации о состоянии его компонентов, поэтому вопрос, как проверить uln 2003a вполне актуален. А сделать это можно достаточно просто:
Прозвонить мультиметром. С его помощью можно выяснить пробит ли диод или сам транзистор. Если что-то пробито (звонится на КЗ или около), то в любом случае эта ячейка неисправна. Базу прозвонить таким способом не удастся, потому что на входе имеется резистор сопротивлением 2,7 кОм. Лучше попробовать включить открыть транзистор, подав на вход напряжение величиной не более 3,85 В.
instrument.guru
Микросхема ULN2003 (ULN2003a) по сути своей является набором мощных составных ключей для применения в цепях индуктивных нагрузок. Может быть применена для управления нагрузкой значительной мощности, включая электромагнитные реле, двигатели постоянного тока, электромагнитные клапаны, в схемах управления различными шаговыми двигателями и другие.

Краткое описание ULN2003a. Микросхема ULN2003a - это транзисторная сборка Дарлингтона с выходными ключами повышенной мощности, имеющая на выходах защитные диоды, которые предназначены для защиты управляющих электрических цепей от обратного выброса напряжения от индуктивной нагрузки.
Каждый канал (пара Дарлингтона) в ULN2003 рассчитан на нагрузку 500 мА и выдерживает максимальный ток до 600 мА. Входы и выходы расположены в корпусе микросхемы друг напротив друга, что значительно облегчает разводку печатной платы.
ULN2003 относится к семейству микросхем ULN200X. Различные версии этой микросхемы предназначены для определенной логики. В частности, микросхема ULN2003 предназначена для работы с TTL логикой (5В) и логических устройств CMOS. Широкое применение ULN2003 нашло в схемах управления широким спектром нагрузок, в качестве релейных драйверов, драйверов дисплея, линейных драйверов и т. д. ULN2003 также используется в драйверах шаговых двигателей.



Ниже приводим список чем можно заменить ULN2003 (ULN2003a):
Зачастую микросхему ULN2003 используют при управлении шаговым двигателем. Ниже приведена схема включения ULN2003a и шагового двигателя:
 ULN2003a - схема подключения
ULN2003a - схема подключенияДополнительное описание на русском языке ULN2003а приведено в datasheet.
 Скачать datasheet ULN2003 на русском (167,0 Kb, скачано: 13 284)
Скачать datasheet ULN2003 на русском (167,0 Kb, скачано: 13 284)

www.joyta.ru
В 16-выводном корпусе ULN2003 размещены 7 транзисторов Дарлингтона, которые способны управлять нагрузками с током до 500 мА и напряжением до 50 В на канал.

Спектр применений ULN2003 весьма широк:
На самом деле существует несколько типов похожих транзисторных сборок начнем с самой распространенной 2003 серии.

Каждый из семи каналов содержит по два биполярных транзистора, резистор 2,7 кОм ограничивающий базовый ток, и два резистора на 7,2 кОм и 3 кОм защищающие транзисторы от открывания обратным током коллектора. Кроме того к схеме добавлены три защитных диода: первый защищает вход от отрицательного напряжения, два других защищают выход от отрицательного напряжения и от превышения напряжения на транзисторах выше питающего.
Наличие защитных выходных диодов актуально при работе на индуктивную нагрузку: диод для шунтирования обмотки реле или обмотки шагового двигателя уже встроен в микросхему и не нужно устанавливать внешний диод. А при использовании 7 каналов – 7 внешних диодов.
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
ULN2002A создана для p-МОП логики.Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.

Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В.По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.

Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.

ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
Одной ULN2003 можно управлять сразу 7 нагрузками, но когда нету такого количества нагрузок, то для увеличения надежности можно объединять каналы. Например 1,2 каналы использовать для первой обмотки; 3,4 для второй обмотки, а 5,6,7 для третьей.

Разные зарубежные производители выпускают свои аналоги ULN2003: L203, MC1413, SG2003, TD62003. Так же есть и отечественный аналог: К1109КТ22.
Для работы с микроконтроллерами может быть более удобнымы 8-ми канальные драйверы. И у семиканальных ULN2003, ULN2004 есть их восьмиканальные братья ULN2803, ULN2804.

Точно также как и ULN2003 — ULN2803 рассчитан на управление от ТТЛ-логики и низковольной К-МОП, а ULN2804 от К-МОП питающейся в диапазоне 6 .. 15 В. Отличия ULN280X от ULN200X только в дополнительном канале и 18-выводном корпусе.У ULN2803А есть отечественный аналог: К1109КТ63.
Третья двойка в названии сборки вместо нуля означает, что выходное напряжение может достигать 95 В, в остальном параметры и схемотехника этих сборок повторяют своих собратьев.
hardelectronics.ru
 |
 |
| Схема фаз двигателя 28BYJ-48-5V. |
Дискретное перемещение вала двигателя 28BYJ-48-5V позволяет повернуть вал ровно на 60 или 279 градусов и зафиксировать. Двигатель содержит две обмотки, причем каждая имеет отвод от середины. Получается 4 фазы. Такой электромагнитный прибор называют шаговый 4-х фазный двигатель. Отводы обмоток соединены вместе как изображено на схеме, к ним подключен красный провод. В результате каждый из контактов четырех фаз соединен с красным проводом. Двигатель относится к однополярным благодаря схеме соединения фаз. К красному проводу подключается питание. Фазы коммутируются силовой электроникой. Перемещение вала на шаг происходит под действием импульса тока.Ротор мотора намагничен особым образом. На роторе 28BYJ-48-5V путем применения специальных технологий намагничивания сформировано 8 магнитов. Полюса магнитов ротора чередуются, перемещаясь мимо обмоток статора. Каждый магнит имеет 2 полюса. Происходит чередование шестнадцати полюсов. Магнитное поле фаз должно то притягивать, то отталкивать полюса магнитов. Это требование в сочетании со сменой полюсов при вращении требует смены полярности тока в фазах. Схема соединения фаз, имеющая отводы от середины обмоток позволяет использовать однополярное питание и исключить коммутационный компонент на линии питания.Один из процессов происходящих в 28BYJ-48-5V можно представить следующим образом. Если красный провод подключен к положительному полюсу питания, то соединяя розовый или оранжевый провод двигателя с общим проводом питания, мы будем создавать магнитные поля в разных фазах одной обмотки. Поля розовой и оранжевой фаз будут направлены противоположно. При этом ток будет протекать в начале по верхней розовой фазе, а затем по нижней оранжевой. Также будет происходить формирование магнитного поля и в двух других фазах: желтой и синей.Вращение ротора происходит за счет коммутации фаз шаг за шагом. Для поворота на требуемый угол или выполнения некоторого количества оборотов на фазы двигателя подают серию импульсов, под действием которых вал поворачивается на серию шагов.
 |

Передаточное число редуктора двигателя 28BYJ-48-5V примерно 64:1.  Чаще всего используются два способа управления: 4 ступени импульсов и 8 ступеней. В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления. Программная библиотека Stepper для Arduino IDE использует именно такой способ управления. Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.Более наглядно теория изложена в следующем видео о подключении 28BYJ-48-5V к Raspberry Pi. ХАРАКТЕРИСТИКИ 28BYJ-48-5V Cкорость вращения номинальная 15 об/мин максимальная 25 об/минПитание напряжение 5 В ток каждая обмотка 160 мА, в 4-шаговом режиме 320 мА, при быстром вращении 200 мА.Сопротивление фаз при измерении от провода питания 41 ОмКоличество шагов ротора 64Коэффициент редукции 1/63,68395Угол шага двигателя без учета редуктора при 4-ступенчатой последовательности 11,25 ° (32 шага на оборот) при 8-ступенчатой последовательности 5,625 ° (64 шага на оборот)Количество шагов вала мотора 28BYJ-48 за один оборот в 4-ступенчатой последовательности 32 x 64 = 2048 в 8-ступенчатой последовательности 64 x 64 = 4096Крутящий момент не менее 34,3 мНм (120 Гц)Тормозящий момент 600–1200 гсмТяга 300 гсмИзоляция класса АШум на расстоянии 0,1 м не более 35 dBВес 33 г
Чаще всего используются два способа управления: 4 ступени импульсов и 8 ступеней. В 4-ступенчатом управлении всегда подключены к питанию две из четырех обмоток двигателя – полношаговый метод управления. Программная библиотека Stepper для Arduino IDE использует именно такой способ управления. Если фазам по цвету проводов присвоить обозначения А синий, Б розовый, В желтый, Г оранжевый, то получим наименования фаз А, Б, В, Г. Их поочередное включение можно представить в виде последовательной смены сочетаний включенных фаз АБ-БВ-ВГ-ГА-АБ.В 8-ступенчатой последовательности включается сначала одна фаза потом две, потом опять одна следующая, снова две и так далее. Управление мотором происходит в соответствии с последовательностью: А-АБ-Б-БВ-В-ВГ-Г-ГД-Д-ДА-А.Более наглядно теория изложена в следующем видео о подключении 28BYJ-48-5V к Raspberry Pi. ХАРАКТЕРИСТИКИ 28BYJ-48-5V Cкорость вращения номинальная 15 об/мин максимальная 25 об/минПитание напряжение 5 В ток каждая обмотка 160 мА, в 4-шаговом режиме 320 мА, при быстром вращении 200 мА.Сопротивление фаз при измерении от провода питания 41 ОмКоличество шагов ротора 64Коэффициент редукции 1/63,68395Угол шага двигателя без учета редуктора при 4-ступенчатой последовательности 11,25 ° (32 шага на оборот) при 8-ступенчатой последовательности 5,625 ° (64 шага на оборот)Количество шагов вала мотора 28BYJ-48 за один оборот в 4-ступенчатой последовательности 32 x 64 = 2048 в 8-ступенчатой последовательности 64 x 64 = 4096Крутящий момент не менее 34,3 мНм (120 Гц)Тормозящий момент 600–1200 гсмТяга 300 гсмИзоляция класса АШум на расстоянии 0,1 м не более 35 dBВес 33 г 
Размеры мотора 28BYJ-48-5V. Так как основное назначение мотора управление шторкой кондиционера то коэффициент редуктора не точно соответствует 1:64, а на самом деле 1:63,68395. Это означает, что будет не 4096 шагов на оборот, а 4075,772. ПЕРЕДЕЛКА В БИПОЛЯРНЫЙ – УВЕЛИЧЕНИЕ МОЩНОСТИ При необходимости удвоения крутящего момента выполняют простую доработку схемы соединения фаз в двигателе. При этом красный провод питания будет не задействован, а мотор 28BYJ-48-5V становится двухфазным биполярным. В схеме управления будет использовано 4 провода. Доработка заключается в разрыве дорожки как изображено на фото. 
Модернизация мотора 28BYJ-48-5V.
 |
| Схема двухфазного биполярного шагового двигателя. |
Отводы от центров обмоток отсоединяются друг от друга и не используются. Теперь фазы и обмотки становятся одним и тем же.Две фазы вместо четырех содержат витки, распределенные между двумя а не четырьмя фазами. Теперь у одной фазы вдвое большее количество витков. Одна фаза имеет контакты розовый, оранжевый другая желтый, синий. Магнитное поле при удвоенном количестве витков удваивается и крутящий момент возрастает. Но схема управления сложнее. Она должна коммутировать обмотки так, чтобы ток мог протекать в обоих направлениях. Поэтому двигатель 28BYJ-48-5V после доработки становится биполярным. Управление двумя фазами, а не четырьмя снижает дискретность перемещения в два раза. Более подробно о переделке рассказано в видеофрагменте.
 |  |
 Схема модуля ULN2003A. На входы модуля IN1…IN4 поступают сигналы управления мощными ключами, входящими в состав микросхемы U1. Схема мощного ключа U1 на составном транзисторе приведена в верхнем левом углу изображения. Нагрузка подключается к соединителю CONM-MTR. В нашем случае это фазы двигателя. Вспомним, что все фазы мотора подключены одним контактом к положительному полюсу питания схемы. Под действием управляющего сигнала на входе Input X открывается выходной транзистор микросхемы и соединяет выход Output X с общим проводом. К выходам Output подключены вторые контакты фаз. Диод в схеме составного транзистора подключен к контакту COM, здесь это провод питания. Роль этого диода состоит в ограничении выходного напряжения не выше напряжения питания микросхемы плюс примерно 0,6 вольт. Такая защита цепей схемы необходима из-за импульсов напряжения появляющихся при коммутации фаз двигателя. Светодиоды показывают какой выход микросхемы подключен к общему проводу. Для их работы следует установить перемычку J1. Она устанавливается только при питании модуля 5 В. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка J1 снимается. ПОДКЛЮЧЕНИЕ ULN2003A
Схема модуля ULN2003A. На входы модуля IN1…IN4 поступают сигналы управления мощными ключами, входящими в состав микросхемы U1. Схема мощного ключа U1 на составном транзисторе приведена в верхнем левом углу изображения. Нагрузка подключается к соединителю CONM-MTR. В нашем случае это фазы двигателя. Вспомним, что все фазы мотора подключены одним контактом к положительному полюсу питания схемы. Под действием управляющего сигнала на входе Input X открывается выходной транзистор микросхемы и соединяет выход Output X с общим проводом. К выходам Output подключены вторые контакты фаз. Диод в схеме составного транзистора подключен к контакту COM, здесь это провод питания. Роль этого диода состоит в ограничении выходного напряжения не выше напряжения питания микросхемы плюс примерно 0,6 вольт. Такая защита цепей схемы необходима из-за импульсов напряжения появляющихся при коммутации фаз двигателя. Светодиоды показывают какой выход микросхемы подключен к общему проводу. Для их работы следует установить перемычку J1. Она устанавливается только при питании модуля 5 В. Отслеживание свечения светодиодов помогает отладить схему соединения двигателя и управляющую программу. В дальнейшем для экономии тока питания перемычка J1 снимается. ПОДКЛЮЧЕНИЕ ULN2003A  |
| Назначение контактов модуля ULN2003A. |
 Соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A. ПРОГРАММИРОВАНИЕ В ARDUINO IDE Stepper – программная библиотека входит в Arduino IDE и предназначенная для работы с шаговыми двигателями без редуктора. Библиотека Stepper поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Предназначена для решения простых задач при управлении одним двигателем.Stepper2.ino – программа, содержащая полный набор функций, которые могут быть использованы для запуска 28BYJ-48-5V. Обсуждение программы на странице куда ведет ссылка. Планы преобразовать программу в полноценную библиотеку так и не были реализованы.Custom Stepper – библиотека может быть использована для управления различными шаговиками, но настройки по умолчанию для 28BYJ-48-5V.AccelStepper – библиотека работает эффективно. Нагрев двигателя меньше, поддерживает изменение скорости.Имеет объектно-ориентированный интерфейс для 2, 3 или 4-выводных шаговых двигателей.Поддержка регулировки скорости.Поддержка нескольких шаговых двигателей.Функции API не используют функцию delay и не прерывают работу.Поддержка выбора функции для шага позволяет работать совместно с библиотекой AFMotor.Поддержка низких скоростей.Расширяемый API.Поддержка подклассов.
Соединения двигателя 28BYJ-48-5V и модуля управления ULN2003A. ПРОГРАММИРОВАНИЕ В ARDUINO IDE Stepper – программная библиотека входит в Arduino IDE и предназначенная для работы с шаговыми двигателями без редуктора. Библиотека Stepper поддерживает только полношаговый метод управления и имеет сильно ограниченные возможности. Предназначена для решения простых задач при управлении одним двигателем.Stepper2.ino – программа, содержащая полный набор функций, которые могут быть использованы для запуска 28BYJ-48-5V. Обсуждение программы на странице куда ведет ссылка. Планы преобразовать программу в полноценную библиотеку так и не были реализованы.Custom Stepper – библиотека может быть использована для управления различными шаговиками, но настройки по умолчанию для 28BYJ-48-5V.AccelStepper – библиотека работает эффективно. Нагрев двигателя меньше, поддерживает изменение скорости.Имеет объектно-ориентированный интерфейс для 2, 3 или 4-выводных шаговых двигателей.Поддержка регулировки скорости.Поддержка нескольких шаговых двигателей.Функции API не используют функцию delay и не прерывают работу.Поддержка выбора функции для шага позволяет работать совместно с библиотекой AFMotor.Поддержка низких скоростей.Расширяемый API.Поддержка подклассов. 
 Набор для использования шагового двигателя в различных приборах. Поставка вместе с двигателем платы управления ULN2003A сокращает время на наладку и сборку электромеханического прибора. Шаговый двигатель и управляющий им модуль имеют соединители одного типа. Использование набора совместно с микроконтроллерным модулем позволяет собирать различные моторизованные системы. Набор ориентирован на специалистов хорошо владеющих программированием и не имеющих большого опыта монтажа пайкой. Предназначен для привода широкого спектра механизмов.Шаговый 4-х фазный двигатель 5V с платой управления ULN2003 должны подключаться к одному источнику питания 5 В.
Набор для использования шагового двигателя в различных приборах. Поставка вместе с двигателем платы управления ULN2003A сокращает время на наладку и сборку электромеханического прибора. Шаговый двигатель и управляющий им модуль имеют соединители одного типа. Использование набора совместно с микроконтроллерным модулем позволяет собирать различные моторизованные системы. Набор ориентирован на специалистов хорошо владеющих программированием и не имеющих большого опыта монтажа пайкой. Предназначен для привода широкого спектра механизмов.Шаговый 4-х фазный двигатель 5V с платой управления ULN2003 должны подключаться к одному источнику питания 5 В.
Описание мотора на английском на китайском
Параметры модификаций мотораОписание модуляWikiПодключение и управление
arduino-kit.ru
Каждая микросхема серии ULx200xA из семи составных транзисторов Дарлингтона с выходами подключенными по схеме с общим коллектором. Также к выходам подключены защитные диоды, для возможности переключения индуктивной нагрузки.
Микросхемы серии ULN2002A рассчитаны на работу с МОП структурами с p-каналом при напряжении от 14 В до 25 В. К каждому входу матрицы подключен стабилитрон и резистор для ограничения максимального тока до безопасного уровня. В микросхемах серии ULx2003A есть резистор 2.7 кОм в цепи базы составного транзистора для работы напрямую с ТТЛ или 5 В КМОП логикой.
В микросхемах серии ULx2004A в цепь базы подключен резистор сопротивлением 10.5 кОм для работы напрямую с КМОП микросхемами, использующими напряжение питания от 6 до 15 В. Необходимый входной ток для ULx2004A ниже, чем для ULx2003A, а напряжение меньше, чем требуется для ULN2002A.
| ULx200xD | SOIC (16) | 9.90 мм × 3.91 мм |
| ULx200xN | PDIP (16) | 19.30 мм × 6.35 мм |
| ULN200xNS | SOP (16) | 10.30 мм × 5.30 мм |
| ULN200xPW | TSSOP (16) | 5.00 мм × 4.40 мм |
 Упрощенная блок-схема
Упрощенная блок-схема
 Расположение выводов (вид сверху)
Расположение выводов (вид сверху)
| 1B | 1 | I | Входы от 1 до 7, подключенные к цепи базы составного транзистора |
| 2B | 2 | ||
| 3B | 3 | ||
| 4B | 4 | ||
| 5B | 5 | ||
| 6B | 6 | ||
| 7B | 7 | ||
| 1C | 10 | O | Выходы от 1 до 7, подключенные к коллектору составного транзистора |
| 2C | 11 | ||
| 3C | 12 | ||
| 4C | 13 | ||
| 5C | 14 | ||
| 6C | 15 | ||
| 7C | 16 | ||
| COM | 8 | I/O | Общий катодный узел для диодов в цепи обратной связи(обязателен для индуктивных нагрузок) |
| E | 7 | — | Общий для всех ключей эмиттер (обычно подключается к земле) |
| VCC | Напряжение коллектор-эмиттер | 50 | В | ||
| Обратное напряжение на диоде (2) | 50 | В | |||
| VI | Входное напряжение (2) | 30 | В | ||
| Максимальный ток коллектора | 500 | мА | |||
| IOK | Выходной ток | 500 | мА | ||
| Общий ток на выводе эмиттеров | –2.5 | A | |||
| TA | Рабочий диапазон температур на открытом воздухе | ULN200xA | –20 | 70 | °C |
| ULN200xAI | –40 | 105 | |||
| ULQ200xA | –40 | 85 | |||
| ULQ200xAT | –40 | 105 | |||
| TJ | Рабочая температура кристалла | 150 | °C | ||
| Температура припоя 1.6 мм в течении 10 с | 260 | °C | |||
| Tstg | Температура хранения | –65 | 150 | °C | |
TA = 25°C
| tPLH | Время задержки при переключении на выходе с низкого уровня на высокий | 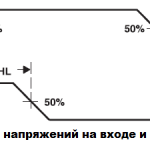 | 0.25 | 1 | мкс | |
| tPHL | Время задержки при переключении на выходе с высокого уровня на низкий | | 0.25 | 1 | мкс |
| tPLH | Время задержки при переключении на выходе с низкого уровня на высокий | | 0.25 | 1 | мкс | |
| tPHL | Время задержки при переключении на выходе с высокого уровня на низкий | | 0.25 | 1 | мкс |
| tPLH | Время задержки при переключении на выходе с низкого уровня на высокий | | 1 | 10 | мкс | |
| tPHL | Время задержки при переключении на выходе с высокого уровня на низкий | | 1 | 10 | мкс |
| tPLH | Время задержки при переключении на выходе с низкого уровня на высокий | | 1 | 10 | мкс | |
| tPHL | Время задержки при переключении на выходе с высокого уровня на низкий | | 1 | 10 | мкс |
|
|
| Характеристики генератора импульсов: PRR = 12.5 кГц, ZO = 50 Ом. CL включает в себя емкость датчика и jig конденсатора. Для проверки ULN2003A , ULN2003AI , и ULQ2003A VIH = 3 В; для ULN2002A VIH = 13 В; для ULN2004A и ULQ2004A VIH = 8 В. |
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
ULN2003A применяется в схемах управления мощными нагрузками, потребляющими большой ток или рассчитанными на высокое напряжение (возможно и то и другое). Через ULN2003A можно подключать к управлению нагрузкой микроконтроллеры или другие логические схемы, не поддерживающие такие большие токи и напряжения. Эта микросхема общего назначения для управления индуктивными нагрузками. Возможно управление моторами, соленоидами и реле, на рисунке ниже приведена схема для такого случая.
 Схема включения ULN2003A для управления индуктивной нагрузкой
Схема включения ULN2003A для управления индуктивной нагрузкой
| Расчетные параметры | Примерные значения |
| Напряжение управления на входе | от 3.3 В до 5 В |
| Напряжение питания катушки | от 12 В до 48 В |
| Количество каналов | 7 |
| Ток на выходе (RCOIL) | 0т 20 мА до 300 мА на канал |
| Коэффициент заполнения | 100% |
При использовании ULN2003A для управления индуктивной нагрузкой необходимо определить следующее:
Напряжение на катушке (VSUP), сопротивление катушки (RCOIL) и низкий уровень напряжения (VCE(SAT) или VOL) определяют ток через катушку. Формула расчета: ICOIL = (VSUP – VCE(SAT)) / RCOIL.
Низкий уровень напряжения (VOL) соответствующий VCE(SAT) может быть определен по графикам приведенным на Рис. 2, Рис. 3, Рис. 8.
Число подключаемых катушек зависит от тока в катушках рассеиваемой мощности на кристалле. Число подключаемых катушек может быть определено по графикам приведенным на Рис. 5, Рис. 6.
Для более точного определения числа катушек, при расчете рассеиваемой мощности на кристалле PD, можно воспользоваться следующей формулой: 
,где
Осциллограммы показанные на Рис. 10 и Рис. 11 получены при использовании ULN2003A для управления электромагнитным реле OMRON G5NB со следующими параметрами: VIN = 5 В, VSUP= 12 В, and RCOIL= 2.8 кОм.
|
|
|
|
|
|
|
|
|
 Купить ULN2003A
Купить ULN2003A Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
rudatasheet.ru
Приобрести можно в магазине – партнере проекта FastAVR со скидкой 10% ( Драйвер, двигатель с драйвером)
Шаговый двигатель 28BYJ-48 и его драйвер, работающем на основе микросхемы ULN2003A.
Шаговый двигатель 28BYJ-48 обладает хорошим крутящим моментом, хоть и заставить его вращаться быстро будет непросто. Подобные двигатели работают в вентиляторах и кондиционерах, поэтому они не так уж и дороги (хотя выглядят так массивно). При том, будучи устроенным гораздо проще, чем сервопривод, шаговый двигатель является очень надёжным и доступным устройством!
Также Вы можете посмотреть на драйвер. Именно это устройство передаёт команды от Вашей Arduino на сам двигатель! Чип ULN2003A, на основе которого построен драйвер, позволяет с помощью слабого тока микроконтроллера, такого как Arduino, управлять мощными нагрузками с током до 500 мА и напряжением до 50 В. Как раз такой нагрузкой и является двигатель.
Подключение шагового двигателя предельно понятно – на корпусе драйвера есть специальный разъём, куда необходимо вставить кабель от 28BYJ-48. Гораздо интереснее разбираться с самим драйвером! Четыре вывода In1, In2, In3 и In4 необходимо подключить к цифровым пинам Arduino – именно через них будет идти управление магнитами внутри двигателя. Обратите внимание, что в коде порядок этих пинов при подключении шаговика будет 1-3-2-4, что необходимо для правильной работы схемы. Далее, если Ваш мотор будет вибрировать, но не вращаться так, как Вы хотите, – практически наверняка проблема в очередности пинов. Также необходимо подключить “питание” и “землю” – для этого есть соответствующие пины “+” и “-” возле надписи “5-12V”. Шаговые двигатели обычно требуют довольно большого питания, поэтому дополнительно есть пины, рассчитанные на 12 Вольт и сейчас перекрытые маленьким пластиковым джампером. В идеале же стоит использовать отдельный источник питания!

Как мы уже говорили, шаговый двигатель вращается согласно последовательности, в которой включены его внутренние электромагниты. В нашем случае постоянно включены только две из четырёх катушек, и только состояние одной из этих катушек изменяется на следующем шаге. О том, какие катушки включены, говорят и горящие лампочки на плате драйвера.
 273 Comments: 9Publics: 291Registration: 04-02-2018
273 Comments: 9Publics: 291Registration: 04-02-2018 flprog.ru
Выпуск:
Один из шаговых двигателей не вращается.
Настроить:
Установка включает в себя два шаговых двигателя, как показано на диаграмме. При включении цепи вращается только один шаговый двигатель. Тем не менее, я чувствую вибрации в обоих двигателях. Кроме того, двигатель, который движется, фактически не завершает один полный оборот (я закодировал его, чтобы превратить один полный оборот).
(На рисунке есть некоторые ошибки: MR подключен к 5V, а OE - к GND). 
Исправление проблем:
Моя текущая настройка - это, по сути, десять шагателей 28BYJ-48-12V, и они работают нормально на некоторое время до того, как эта проблема возникнет (один из двигателей не вращается). Кажется, что увеличение задержки между каждым набором сдвигов также помогает.
Update
Я попытался снова с двумя 5-ватными моторами, и кажется, что этот вопрос не повторился. Тем не менее, я немного тестировал:
Десять 12-ватных шаговых двигателей с 74HC595 (без проблем с вращающимся двигателем):
Я очень обеспокоен тем, что напряжение питания падает, когда вход ULN2003 выходит HIGH. Мой проект в конечном итоге будет включать в себя 64 двигателя, поэтому я бы предположил, что сдвиговый регистр не получит достаточного напряжения для правильной работы.
Это нормальное падение напряжения? Что я должен сделать, чтобы исправить эту проблему?
Update 2
В случае, если кто-то задается вопросом, проблема, похоже, связана с моим подключением к электросети. Источник питания для моего arduino был первоначально из порта USB моего ноутбука. После использования приличного источника питания 5 В для питания ардуино проблема исчезла.
ru.1answer.info
 Рис. 1 Схема испытаний и кривые напряжений
Рис. 1 Схема испытаний и кривые напряжений Рис. 2 Напряжение насыщения коллектор-эмиттер от тока коллектора (для одного транзистора Дарлингтона)
Рис. 2 Напряжение насыщения коллектор-эмиттер от тока коллектора (для одного транзистора Дарлингтона)") Рис. 3 Напряжение насыщения коллектор-эмиттер от общего тока коллектора (для двух транзисторов Дарлингтона в параллели)
Рис. 3 Напряжение насыщения коллектор-эмиттер от общего тока коллектора (для двух транзисторов Дарлингтона в параллели) Рис. 4 Ток коллектора от тока на входе
Рис. 4 Ток коллектора от тока на входе Рис. 5 D-исполнение максимальный ток коллектора от коэффициента заполнения
Рис. 5 D-исполнение максимальный ток коллектора от коэффициента заполнения Рис. 6 N-исполнение максимальный ток коллектора от коэффициента заполнения
Рис. 6 N-исполнение максимальный ток коллектора от коэффициента заполнения Рис. 7 Максимальный и номинальный входные токи от входного напряжения
Рис. 7 Максимальный и номинальный входные токи от входного напряжения Рис. 8 Максимальное и номинальное напряжения насыщения от выходного тока
Рис. 8 Максимальное и номинальное напряжения насыщения от выходного тока Рис. 9 Минимальный выходной ток от входного тока
Рис. 9 Минимальный выходной ток от входного тока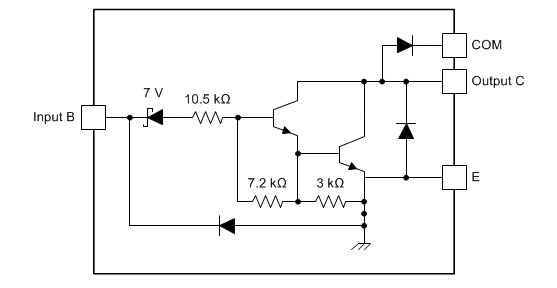 Внутренняя схема каждой ячейки матрицы ULN2002A
Внутренняя схема каждой ячейки матрицы ULN2002A Внутренняя схема для каждой ячейки ULN2003A, ULQ2003A и ULN2003AI
Внутренняя схема для каждой ячейки ULN2003A, ULQ2003A и ULN2003AI Внутренняя схема для каждой ячейки ULN2004A и LQ2004A
Внутренняя схема для каждой ячейки ULN2004A и LQ2004A Рис.10 Отклик на выходе при подключении катушки
Рис.10 Отклик на выходе при подключении катушки Рис. 11 Отклик на выходе при отключении катушки
Рис. 11 Отклик на выходе при отключении катушки p-МОП подключение нагрузки
p-МОП подключение нагрузки TTL подключение нагрузки
TTL подключение нагрузки Буфер для подключения больших токовых нагрузок
Буфер для подключения больших токовых нагрузок Использование подтягивающего резистора для увеличения тока
Использование подтягивающего резистора для увеличения тока









