





Шаговый двигатель представляет собой электромеханическое устройство, преобразующее электроимпульс в дискретное механическое перемещение. Данный механизм практически ничем не отличается от других электрических моторов. Зачастую в устройство данной детали входит контроллер шагового двигателя, вал и выводы. Все это объединяется в большой круглый (реже прямоугольный) корпус.
 Область применения
Область примененияШаговый двигатель может применяться в самых разнообразных отраслях. Чаще всего такие моторы встречаются на промышленном оборудовании и в электронных офисных приборах, таких как факсы, принтеры и дисководы.
Сейчас производится несколько типов данных двигателей, поэтому чтобы он корректно работал, к каждому механизму необходимо подобрать свою схему и принцип работы драйвера.
Во-первых, шаговый двигатель очень надежен в эксплуатации. Это объясняется тем, что в его конструкции нет графитных щеток, которые часто применяются в автомобильных генераторах и имеют малый срок службы. Управление шаговым двигателем осуществляют подшипники, поэтому сколько они будут работать, столько будет исправным мотор. Во-вторых, данному механизму свойственно позиционирование без обратной связи. Это достигается за счет зависимости положения детали от входных импульсов. В-третьих, шаговый двигатель является одним из немногих устройств, которые обеспечивают быстрый запуск, остановку и реверсирование всей системы. При этом мотор обеспечивает полный момент в режиме остановки. Также этому мотору свойственны прецизионная повторяемость и позиционирование. Современные двигатели работают с точностью до 3-4 процентов величины шага, причем погрешность не накапливается во время их работы от шага к шагу.
Минусов у этого устройства тоже много, однако меньше чем преимуществ. Из основных недостатков следует отметить тот факт, что данным двигателям свойственно явление резонанса. Также они могут потерять контроль положения ввиду работы без обратной связи. На высоких скоростях шаговый двигатель не очень производительный, хотя и в нормальном режиме работы он не отличается своей мощностью. Кстати, даже не находясь под нагрузкой, все равно он поглощает электроэнергию, причем в том самом количестве, что и ранее при работе. Из-за сложной схемы управления данное устройство трудно отремонтировать самостоятельно.
Не стоит путать эти два механизма. Несмотря на то что оба имеют похожее устройство и принцип работы, во многом они отличаются между собой. Главное их различие заключается в том, что шаговый мотор может обеспечить 1 оборот ротора за энное количество шагов. При этом данное устройство отличается своей плавностью и синхронностью вращения. Серводвигатели имеют в своей конструкции специальные датчики обратной связи, определяющие скорость и положение устройства для системы управления. В качестве нее здесь предусматривается резольвер или энкодер.
fb.ru
 Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер.
Для работы любого электрического прибора, необходим специальный приводной механизм. Шаговый двигатель, является одним из таких устройств. Сегодня есть большой выбор разнообразных электродвигателей, разделяющихся по типу и по схеме драйвера, которым управляет контроллер.
Шаговый двигатель — это синхронное электромеханическое устройство, которое передает сигнал управления в механическое движения ротора. Вращение происходит шагами, которые фиксируются в определенном положении.
 При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала.
При прикладывании напряжения к клеммам, щетки электродвигателя запускаются и начинают беспрерывно вращаться. Движок холостого хода обладает особым свойством, это превращение входящих импульсов прямоугольной направленности в заранее установленное положение приложенного ведущего вала.
Вал сдвигается под фиксированным углом с каждым импульсом. Если вокруг центрального куска железа зубчатой формы расположены несколько зубчатых электромагнитов, то устройства с таким редуктором достаточно эффективны. Микроконтроллер возбуждает электромагниты. Один зубчатый электромагнит под воздействием энергии притягивает зубья зубчатого колеса к своей поверхности, таким образом, вал двигателя делает поворот. Когда зубья выровнены по отношению к электромагниту, они немного смещаются к соседней магнитной детали.
Чтобы шестеренка начала вращение и выровнялась с предыдущим колесом, первый электромагнит отключается, а следующий включается. Затем весь процесс повторяется столько раз, сколько необходимо. Такое вращение называют постоянным шагом. Подсчитав количество шагов при полном обороте двигателя, определяется скорость его вращения.
 Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный.
Шаговые двигатели по конструкции ротора делятся на три типа: реактивный, с постоянными магнитами и гибридный.
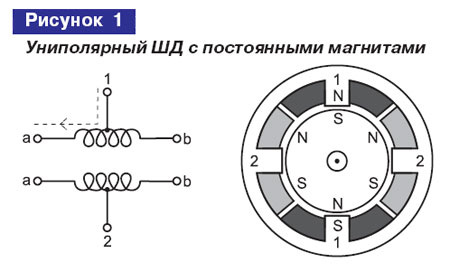
Униполярный. Изменять расположение магнитных полюсов можно, не меняя при этом направленность тока. Достаточно включить отдельно каждую фазу обмотки. Устройство состоит из одной обмотки на фазу с расположенным в центре ответвлением.
Биполярный . У таких двигателей на фазу приходится одна обмотка, нет общего вывода, а есть два — на фазу. Благодаря этому биполярные устройства обладают наибольшей мощностью, чем униполярные. Для изменения магнитных полярностей полюсов, в обмотке изменяют направления тока.
Чтобы уменьшить угол шага, был разработан гибридный шаговый двигатель. В свою конструкцию, он включает лучшие свойства двигателя с постоянными магнитами и реактивного двигателя. Ротор представлен в виде намагниченного вдоль продольной оси цилиндрического магнита. Статор состоит из двух или четырех фаз, которые размещены между парами явно выраженных полюсов.
 Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе. Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему.
Работа по подключению и управлению шагового двигателя будет зависеть от того, каким образом вы хотите запустить устройство и сколько проводов находится на приводе. Шаговые электродвигатели могут иметь от 4 до 8 проводов, поэтому для их подключения используют определенную схему.
Для управления шаговым двигателем требуется контроллер. Контроллер, это схема, подающая напряжение к одной из катушек статора. Контроллер изготовлен на базе интегральной микросхемы типа ULN 2003 включающей в себя комплект составных ключей. Каждый ключ имеет на выходе защитные диоды, которые, позволяют подключать индукционные нагрузки, не требуя дополнительной защиты.
 Устройство может работать в трех режимах:
Устройство может работать в трех режимах:
В области электротехники и механики шаговый электродвигатель считается сложным устройством, которое включает в себя множество механических и электрических возможностей. На практике применяются следующие технические характеристики:
instrument.guru
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
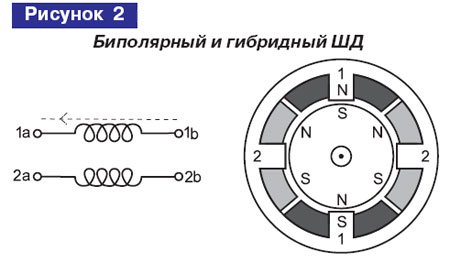
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
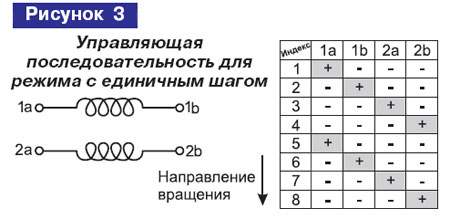
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.

Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
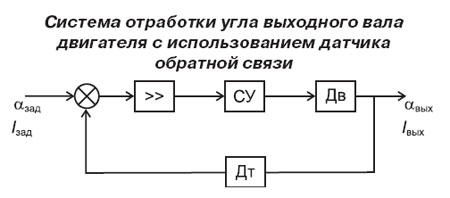
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
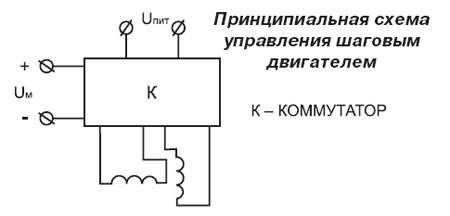
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.

Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».

Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.

При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.

Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
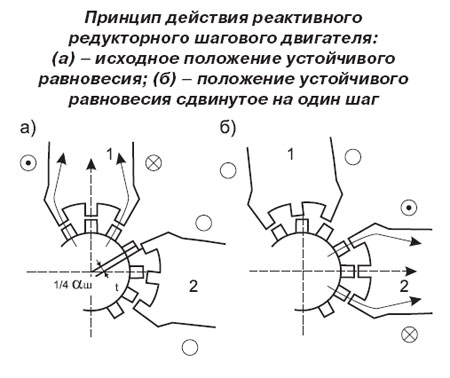
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
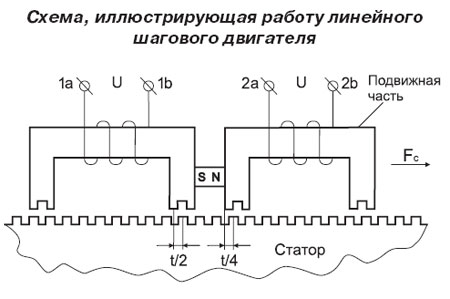
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
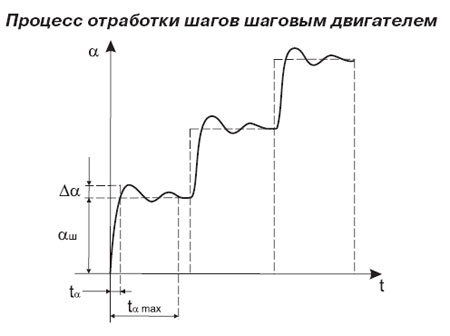
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
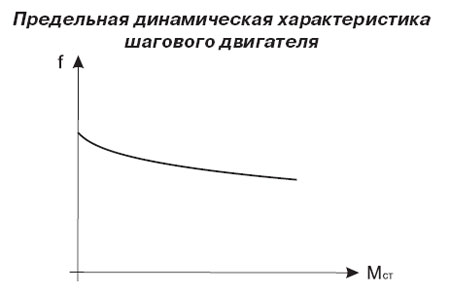
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.

Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
Автор: В. П. Колодийчик.
Журнал «Электротехнический рынок» №12 (18) декабрь 2007
vt-tech.eu
Существует отдельный вид электродвигателей, которые относятся к разряду исполнительных, дискретного действия. Это шаговый двигатель, принцип работы которого основан на воздействии импульсов на ротор, благодаря чему происходит его перемещение под определенным углом, составляющим шаг.
Эти двигатели используются в автоматизированных системах управления. Они сохраняют синхронность в любом положении: при пуске, торможении, вращении или реверсе.
При прохождении по обмоткам управления постоянного тока допускается фиксированная длительная стоянка ротора. Шаговые двигатели используются для питания электронные коммутаторы, управление которыми осуществляется с помощью маломощных импульсов.

Когда по управляющим обмоткам статора происходит прохождение токов, то в это время в роторе развивается синхронизирующий момент, производящий его максимальное перемещение. При взаимодействии магнитных полей статора и ротора, поля их осей совпадают, а ротор находится в устойчивом положении.
При переключении обмоток управляющим устройством, ток начинает протекать не по первой, а по второй обмотке. Наступает возникновение синхронизирующего момента, в результате которого происходит перемещение ротора в новую устойчивую позицию.

При последующем включении первой фазы, имеющей обратную полярность, происходит дальнейший поворот ротора. Таким образом, последовательное изменение тока в обмотке статора вызывает перемещение поля статора в пространстве. Когда вращение поля прекращается, происходит остановка ротора.
Магнитное поле, создаваемое в обмотках управления, перемещается на фиксированное значение угла по окружности статора при всех случаях переключения напряжения. Любое единичное переключение токов находится в соответствии с поворотами ротора на определенные углы, называемые шагами. Величина шага напрямую зависит от числа тактов коммутации, происходящих в течение одного периода изменения напряжения.

Таким образом, шаговый двигатель находится в зависимости от количества управляющих обмоток их типа, а, также от определенной величины угла. Синхронный поворот ротора происходит на такое значение угла, которое пропорционально количеству импульсов. При этом, ротор начинает вращаться со средней скоростью, пропорциональной частоте импульсов управления.
Частота приемистости является характерной чертой пусковых свойств двигателя, когда пуск осуществляется при нормальной синхронизации ротора. По сути, любой шаговый двигатель представляет собой синхронный двигатель, работа которого обеспечивается импульсным питанием.
electric-220.ru
Двигатели постоянного тока (ДПТ) с постоянными магнитами Lenze начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.
Шаговый двигатель (ШД) может быть рассмотрен как ДПТ без коллекторного узла. Обмотки ШД являются частью статора. На роторе расположен постоянный магнит или, для случаев с переменным магнитным сопротивлением, зубчатый блок из магнитомягкого материала. Все коммутации производятся внешними схемами. Обычно система мотор — контроллер разрабатывается так, чтобы была возможность вывода ротора в любую, фиксированную позицию, то есть система управляется по положению. Цикличность позиционирования ротора зависит от его геометрии.
Принято различать шаговые двигатели (Autonics, Motionking, Fulling motor) и серводвигатели (Lenze). Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Основное отличие заключается в шаговом (дискретном) режиме работы шагового двигателя (n шагов на один оборот ротора) и плавности вращения синхронного двигателя. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется резольвер или sin/cos энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см. рис. 2).
За это упрощение приходится платить более сложным реверсированием полярности каждой пары полюсов мотора.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления.Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т.д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя. Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Шаговый двигатель работает устойчиво, если в процессе отработки угла при подаче на его обмотки управления серии импульсов не происходит потери ни одного шага. Это значит, что в процессе отработки каждого из шагов ротор двигателя занимает устойчивое равновесие по отношению к вектору результирующей магнитной индукции дискретно вращающегося магнитного поля статора.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода xследующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Основными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемлемость падает с увеличением нагрузки.
Автор: В. П. Колодийчик.
Журнал «Электротехнический рынок» №12 (18) декабрь 2007
vt-tech.eu

Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя. Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:

Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%. Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.
Для того чтобы уменьшить вибрации и добится более плавного и точного вращения вала существует более продвинутый способ – управление в полушаговом режиме, алгоритм включения половинок обмоток приведен ниже:

При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза. Есть еще способ увеличить дробленеи шага ротора двигателя – микрошаговое управление – когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора – чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка. Поэтому крутить будем в полушаге 🙂
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой – в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.

К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка.
Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
Плата управления в сборе:


Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = “2313def.dat”$crystal = 4000000
Dim S As Byte ‘эта переменная следит за номером шага двигателя
S = 1
On Int0 Knopka1 ‘даем имена обработчикам внешних прерываний
On Int1 Knopka2
Config Portb = Output ‘конфигурируем порт на выход
Config Portd.5 = Output ‘конфигурируем ногу для подключения светодиода
Led Alias Portd.5 ‘присваиваем имя LED выводу 5 порта D
‘прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажата
Config Int0 = Low Level
Config Int1 = Low Level
‘разрешаем прерывания
Enable Interrupts
Enable Int0
Enable Int1
‘основной цикл программы, просто ждем прерывания
Do
Loop
Knopka1: ‘обработчик прерывания первой кнопки
Led = 1 ‘зажигаем светодиод
Incr S ‘увеличим номер шага
If S = 9 Then ‘максимально возможный номер шага = 8
S = 1
End If
Select Case S ‘выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000 ‘задержка между шагами
Led = 0 ‘гасим светодиод
Return
Knopka2: ‘обработчик прерывания второй кнопки
Led = 1 ‘зажигаем светодиод
Decr S ‘тут все тоже самое, только в обратном направлении
If S = 0 Then ‘минимально возможный номер шага = 1
S = 8
End If
Select Case S
Case 1 : Portb = &B00000001
Case 2 : Portb = &B00000011
Case 3 : Portb = &B00000010
Case 4 : Portb = &B00000110
Case 5 : Portb = &B00000100
Case 6 : Portb = &B00001100
Case 7 : Portb = &B00001000
Case 8 : Portb = &B00001001
End Select
Waitus 1000
Led = 0 ‘гасим светодиод
Return
End
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
Взято с: avrproject.ru
Категория: AVR Метки: avrПоследние статьи
shemopedia.ru








