Задача построения станка обычно сводится к трем подзадачам — механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор — потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива — шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) — как раз то, что нужно. Недостаток такого решения — при большой нагрузке двигатель будет пропускать команды — «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
Противоречивые требования. Малый ток — значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент — это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STh48-1684Самое простое решение — источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива — специализированные микросхемы «всё в одном» — с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи — ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.

Из готовых — наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А). Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор — получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения — в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами — так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы — «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) — на плате. Размеры платы — достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
 Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом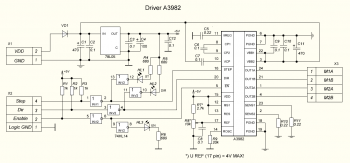 Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Спасибо за внимание! Продолжение следует…
Даташит на микросхему Allegro A3982
Антон (basilevscom)
Россия, Санкт-Петербург
О себе автор ничего не сообщил.
datagor.ru
Шаговый привод - это мехатронное устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Шаговый привод, как правило, состоит из двух основных составляющих частей. Это, так называемый, драйвер, принимающий импульсы от устройства управления верхнего уровня и формирующий напряжение питания шагового двигателя. И, во-вторых, это шаговый двигатель, вал которого, в зависимости от поданного на него напряжения питания, поворачивается на строго определенный, небольшой угол в ту или другую сторону.Устройства управления верхнего уровня (контроллеры шагового привода) формируют импульсные сигналы для точного управления драйверами шаговых двигателей и шаговыми двигателями в зависимости от управляющей программы, записанной, например, в память этого управляющего устройства.На рисунках ниже представлен внешний вид шагового двигателя с выступающим валом и внешний вид драйвера шагового привода на примере драйвера производства фирмы Autonics.
 |
 |
Контроллер шагового привода может иметь вид, представленный на рисунке ниже.

Принцип работы шагового двигателя можно объяснить следующим образом. Допустим имеются два электромагнитных контура (см. рисунок ниже), между которыми расположен постоянный магнит. Магнит может вращаться вокруг оси, перпендикулярной направлениям магнитных линий этих контуров. Представим себе, что выключатель В замыкается. В этом случае, в синем контуре образуется магнитное поле, направление которого можно определить по «правилу буравчика». Взаимодействие поля постоянного магнита и поля, от протекания электрического тока, приведет к повороту магнита на угол 90° по часовой стрелке. После такого шагового движения ротор этого двигателя остановится в вертикальном положении. Чтобы ротору совершить следующий шаг необходимо выключатель В разомкнуть, а выключатель А' - замкнуть. При этом ротор опять займет горизонтальное положение, но теперь южный полюс постоянного магнита будет слева. Ротор опять замрет в таком состоянии до момента прихода следующего токового импульса. Последовательная активация обмоток B', A, B, A' и т.д. двигателя вызывает дискретные угловые перемещения (шаги) ротора.

Наличие постоянного магнита на роторе шагового двигателя не обязательно. Ниже представлена схема конструкции шагового двигателя, где ротор выполнен из магнитомягкого материала. Здесь, подавая импульсы тока на обмотки полюсов статора, можно заставить ротор совершать шаговые движения от одного полюса статора к другому.

Как правило, промышленные шаговые двигатели имеют гибридную конструкцию и сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора. Статор гибридного двигателя имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.

Обычно используются 8 основных полюсов для двигателей с полным шагом 1.8 угловых градуса. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора. Это происходит из-за соответствующего расположения зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы одной половинки ротора являются северными полюсами, а зубцы второй половинки - южными. Кроме того, половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. В машиностроении распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или при использовании половинного шага - 0,9°/шаг (400 шагов/оборот). Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз с двух до пяти. Поэтому пятифазные шаговые двигатели получили распространение в высокоточных системах приводов подач станочного оборудования.
Режим дробления шага (микрошаг) реализуется при совместном управлении током в разных обмотках шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом, можно повысить плавность вращения ротора и точность позиционирования. При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг этого положения. Время переходного процесса в большой степени зависит от характеристик нагрузки. Во многих приложениях такие колебания являются нежелательными. Микрошаговый режим позволяет в значительной степени эти колебания. На рисунке ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.

Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. Шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.Главное преимущество шаговых приводов - простота при высокой точности. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К преимуществам можно отнести стоимость шаговых приводов, которые значительно дешевле сервоприводов с обратной связью.Основной недостаток - в возможности «потери шагов» ротора. Это наиболее известная проблема этих двигателей. Потеря шагов может произойти при большой нагрузке на валу, большом ускорении старта или торможения, при резонансных явления в системе, где установлен шаговый привод. Как один из способов, избежать «потери шагов», можно предложить увеличить мощность шагового двигателя.
Основные характеристики шагового двигателя - это удерживающий момент (синхронизирующий момент, "max. holding torque") и предельная частота следования импульсов. Единицы измерения удерживающего момента шагового двигателя: кГс×см или Н×м. Он определяет тот максимальный момент нагрузки при нулевой скорости, прилагаемый к валу двигателя, после превышения которого шаговый двигатель «опрокидывается», то есть неконтролируемо теряет свое угловое положение. Величина удерживающего момента, приводимая в спецификации, соответствует номинальному току через обмотки двигателя. Рабочий момент в системе должен быть в несколько раз меньше этой предельной характеристики. Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага, называется приемистостью шагового привода. Следует помнить, что с увеличением частоты вращения шагового двигателя значительно падает момент, который может развить этот двигатель. Зависимость развиваемого момента и частоты следования импульсов, как правило, приводятся производителями шаговых двигателей. Пользователю всегда следует обращать внимание на данные частотные характеристики.
www.servosystem.ru
Если заглянуть в историю приводной техники, то можно увидеть, что шаговый двигатель (ШД) появился как дешевая альтернатива позиционному приводу. При этом отличительным и наиболее ценным его качеством являлась крайняя простота управления позицией вала — достаточно лишь в правильной последовательности подавать импульсы в обмотки двигателя и вал шагового двигателя начинает вращаться. Именно это достоинство служило основой массового использования ШД в устройствах автоматизации.
По мере расширения областей применения шагового двигателя улучшались и его технические характеристики. Появились новые конструкции ШД с использованием редкоземельных магнитов, так называемые гибридные ШД, которые по стоимости, на сегодняшний день, приблизились к своим предшественникам, а по развиваемой мощности превосходят последних в несколько раз. В результате у ШД появилось дополнительное конкурентное преимущество — это высокий момент на малых оборотах вращения. Например, момент удержания ШД в 2-3 раза выше, чем у синхронного двигателя эквивалентных массогабарит-ных показателей. Поэтому использование ШД в ряде случаев позволяет исключить редуктор из механической системы и, следовательно, снизить себестоимость автоматической системы в целом.
Повышенный интерес к гибридным ШД, а так же новые требования, предъявляемые к качеству выполняемого движения, заставили пересмотреть способ его управления. Так как шаговому управлению, наряду с явными достоинствами, присущ ряд недостатков, которые значительно сужают области применения ШД. Наиболее существенными из них являются:
1. Повышенная вибрация.Повышенная вибрация возникает при шаговом и полушаговом способах управления на постоянной скорости из-за бесконтрольного перехода вала ротора в новую позицию, определяемую состоянием обмоток. В результате вал ротора совершает затухающие колебания относительно новой позиции до момента поступления нового импульса в обмотки.
Частично решить проблему вибрации удалось за счет разработки микрошагового способа управления, который сводится к разбиению полного шага двигателя на несколько более мелких шагов.
2. Наличие резонансных зон в рабочем диапазоне скоростей.Во время работы двигателя, по мере увеличения скорости вращения, характер колебаний также изменяется и при совпадении частоты поступления импульсов с собственной частотой механической системы возникает резонансное явление. В результате чего момент двигателя практически полностью исчезает, что не редко приводит к пропуску шагов. В свою очередь, пропуск шагов нарушает работу всей системы.
Чтобы исключить влияние пропуска шагов на качество выполняемых операций, специалисты-технологи вводят дополнительный цикл реинициализации по истечении определенного непродолжительного времени, что, безусловно, снижает производительность таких систем.
3. Низкая динамика.Во время переходного процесса любой привод испытывает повышенные нагрузки, так как помимо статического момента двигатель разгоняет и останавливает инерционную нагрузку, приведенную к валу двигателя. В связи с тем, что шаговый привод без обратной связи не имеет информации о текущей внешней нагрузке и текущей позиции, процесс разгона выполняется "вслепую". Поэтому, чтобы избежать выхода из синхронизма, технолог вводит плавный разгон и торможение с существенным запасом. Данный способ формирования переходного процесса ограничивает потенциальные динамические возможности привода.
4. Наличие ярко выраженного стоп-момента.При приближении зубьев ротора к полюсу статора происходит резкое притяжение полюса ротора к полюсу статора, что приводит к возникновению рывка, а при удалении зубьев от полюса возникает обратный эффект, приводящий к уменьшению скорости. При вращении вала двигателя эта особенность приводит к появлению высокочастотной вибрации. Данный эффект особенно ярко выражен на малых оборотах у мощных гибридных шаговых двигателей.
5. Высокая рабочая температура привода и низкий КПД.Чтобы избежать прокручивания вала под воздействием внешних сил, ток в обмотки двигателя подается постоянно, независимо от нагрузки на его валу, поэтому привод потребляет энергию всегда, даже при нулевом противодействующем моменте, что приводит к низкому КПД и высокой рабочей температуре привода.
6. Низкая точность позиционирования.Несмотря на то, что ШД в состоянии выполнять задачу позиционирования без датчика обратной связи, точность отработки задания не высока. Например, при использовании гибридного шагового двигателя с 50 эквивалентными полюсами ошибка позиционирования будет колебаться в диапазоне -0,9…+0,9 градусов, в зависимости от текущей статической нагрузки.
Все описанные недостатки ограничивают области применения ШД. В то время, как потенциальный рынок достаточно велик и, по прогнозам экспертов, ситуация в ближайшие годы не изменится. Поэтому компании- разработчики заняты поиском новых решений существующих проблем. Такие пути уже намечены. Это:
1. Улучшение электромеханических свойств гибридного шагового двигателя.В последнее время на рынке появились ШД с новыми конструктивными особенностями. К ним относятся двигатели с измененным воздушным зазором, измененной формой зуба и т.д. Одной из наиболее перспективных конструкций является пятифазный ШД, обеспечивающий достаточно высокую плавность хода. Однако привод на базе такого ШД существенно увеличивается в стоимости, как за счет стоимости самого двигателя, так и в связи с усложнением системы управления. При этом изменение механики не решает проблем, связанных с пропуском шагов и невысокой скоростью разгона, так как по-прежнему не контролируется текущая позиция вала двигателя.
2. Применение векторного управления.Наиболее перспективным решением перечисленных проблем шагового привода является усовершенствование его метода управления.
Проблему пропуска шагов наиболее эффективно можно решить за счет внедрения в привод датчика позиции и использования высокопроизводительного сигнального процессора. Причем, во избежание значительного увеличения стоимости привода, возможным решением является разработка мехатронного привода на базе ШД, представляющего собой интегрированное устройство, в состав которого входит сам двигатель, система управления и датчик позиции вала. В этом случае в качестве датчика можно использовать бескорпусные ОЕМ-датчики.

При наличии двух таких компонент как сигнальный процессор и датчик позиции в одном устройстве можно отказаться от использования шаговых методов управления и построить систему управления на основе алгоритма векторного управления. Данный метод уже давно используется в сервоприводах на базе синхронных и асинхронных двигателей.
Алгоритм векторного управления основан на поддержании угла 90 градусов между текущей позицией ротора в рамках одного полюса и вектором токов в обмотках двигателя.

Как видно из графика зависимости момента от угла между текущей позицией и вектором тока (Рис.1) максимальная эффективность достигается именно при угле 90 градусов.
При этом расчет текущего угла необходимо выполнять в реальном времени с высокой частотой, так как при формировании токов вал ротора всегда стремится в позицию, заданную вектором токов.
Такой способ обеспечивает высокую эффективность управления: исключается колебание момента, развиваемого двигателем и, как следствие — вибрация; обеспечиваются высокие динамические показатели; исключается пропуск шагов.
Однако в реализации векторного управления для сервопривода шагового (СПШ) есть своя специфика.
ШД имеет 50 эквивалентных пар полюсов в отличие от синхронного двигателя с 6-ю полюсами. В результате алгоритм векторного управления должен отрабатываться в процессоре с частотой свыше 20 кГц, чтобы обеспечить поддержание угла 90 градусов с приемлемой точностью на высоких скоростях вращения. Соответственно и несущая ШИМ (широтно-импульсная модуляция) сигнала имеет ту же частоту. Как показывают исследования, компромиссной является частота 40 кГц, на которой максимальная скорость вращения, допустимая системой управления, достигает 12000 об/мин. При этом, силовые ключи (MOSFET) не переходят в режим усиления и, соответственно, обеспечивают приемлемый КПД привода.
Эффективное уменьшение влияния стоп-момента на неравномерность вращения в таком приводе достигается за счет использования замкнутого регулирования токами.
При резком увеличении скорости, связанной с наличием стоп-момента, двигатель вырабатывает противо ЭДС. Происходит изменение напряжения питания, что приводит к увеличению тока, протекающего в обмотках двигателя. Контур тока, который выполняет коррекцию задания токов каждые 25 мкс, успевает зафиксировать изменения тока и внести компенсационное воздействие, позволяющее сгладить резкие рывки вала двигателя, что и приводит к улучшению плавности хода. Оставшиеся низкочастотные колебания скорости исключаются замкнутым контуром управления скоростью. В результате неравномерность вращения определяется лишь разрешающей способностью датчика скорости (Рис. 2. ).

Как видно из рисунка, колебания относительно заданной скорости составляют ±1 дискрету датчика обратной связи во всем диапазоне скоростей. Например, при использовании датчика с разрешением 160000 импульсов на оборот глубина регулирования достигает 15000:1, т.е. разрешение приводапо скорости составит 0.1875 об/ мин. При этом неравномерность вращения на 100 об/мин не превысит 0.5%.
Наличие такой системы управления позволяет отказаться от дорогих пятифазных ШД. Достаточно использовать обычный гибридный ШД, при этом все его минусы "сглаживает" электроника.
Использование замкнутого регулирования током дает еще одно немаловажное преимущество — увеличение КПД привода.
Увеличение КПД привода происходит за счет того, что задаваемые токи в обмотках двигателя соответствуют нагрузке на валу двигателя. Повышенный ток подается только при появления внешнего противодействия, в отличие от разомкнутого микрошагового способа управления, где ток в обмотки двигателя подается всегда даже при нулевом противодействующем моменте.
Сервопривод шаговый, с использованием векторного управления с замкнутым контуром тока позволяет формировать предельно допустимый электрический момент во время переходного процесса. Это позволяет добиться исключительно высокой динамики без опасения перегорания обмоток и без пропуска шагов.
Например, время выполнения реверса на 500 об/мин выполняется за 18 мс, в то время как эквивалентный по мощности шаговый привод с микрошаговым управлением выполнит данную задачу лишь за 100 мс.

Помимо основного функционала, наличие на "борту" сервопривода современного сигнального процессора позволяет реализовать в рамках системы управления множество дополнительных функций, таких как:
• Программируемый логический контроллер.
• Интерполятор.
• Электронный редуктор.
• Обработка концевых датчиков.
•Контроль температуры.
•Защита от КЗ.
•Защита от пониженного и повышенного напряжения питания.
•Торможение с регулированием вырабатываемого противо ЭДС.
Наличие перечисленных функций позволяет увеличить надежность системы, снизить износостойкость оборудования, а в ряде случаев исключить внешний контроллер управления движением.
Использование передовых методов управления делает возможным применение шаговых двигателей в современных сервосистемах наряду с сервоприводами на базе синхронных и асинхронных двигателей. В свою очередь, использование мехатронного подхода обеспечивает снижение себестоимости такого привода до приемлемых значений, что традиционно свойственно шаговым приводам.
к.т.н. Тихонов А.О.Руководитель отдела исследований и разработок компании "Сервотехника",
Цывинский М.М.Инженер отдела исследований и разработок компании "Сервотехника"
controlengrussia.com
Обзор схемотехники приводов шаговых двигателей.
Подключение маломощных шаговых двигателей (ШД) обычно осуществляется по типовым схемам включения. Силовая часть привода (драйвер) представляет собой набор коммутирующих мощных биполярных или полевых транзисторов. Современная база элементов предлагает использовать транзисторные сборки в виде интегральных микросхем (ИМС).
Типы ШД делятся на несколько групп:
ШД могут быть разной мощности и иметь разный угловой шаг

В промышленности используются готовые модульные блоки для ШД. Управление ШД имеет целый ряд особенностей, таких как контроль фаз, контроль тока в обмотках, нелинейное токоограничение, режимы — шаг, полушаг, микрошаг и др.
Функционально привод ШД представляет собой блок формирования фазовых сигналов и блок коммутирующих ключей.
В радиолюбительской практике использование дефицитных и/или дорогих специализированных ИМС не всегда целесообразно, поэтому проще рассматривать схемотехнику на обычной элементной базе. Как правило речь идет об использовании маломощных ШД для малогабаритных станков и робототехники.
На изображении ниже наглядно продемонстрированны режимы управления ШД.

Функционально схема управления ШД выглядит так

Варианты схем драйверов ШД

Схема подключения униполярного ШД

Драйвер на ИМС

Из схем подключения униполярных ШД видно что коммутирующих фазы сигналя четыре. Блок формирования этих сигналов может быть реализован на микроконтроллерах или на ИМС обычной ТТЛ или КМОП логики, и естесственно на специализированных ИМС.
Простейший тип формирователя

Схема КМОП

Схема ТТЛ
 Авторская статья
Авторская статья

Автор
Учитывая необходимость подачи управления от компьютера через LPT порт, применение микроконтроллеров ATMEGA и PIC в формирователях сигналов более актуально (снижение габаритов, ШИМ токоограничение и т.д.)

Автор

Авторская статья
Применение ШД в различных областях промышленности, измерительной и бытовой технике на сегодняшний день стандарт де-факто, перспективы развития технологий определят в будущем новую нишу, такую как например робототехника.
По материалам:
www.globalspec.com
www.radioelectronika.ru
www.radiokot.ru
robozone.su
texvedkom.org
%PDF-1.5 % 1 0 obj > endobj 2 0 obj >stream application/pdf
www.intechnics.ru
Схема привода для шагового двигателя использует процессор, формирующий на выходе сигнал широтно-импульсной модуляции (ШИМ). Схема привода содержит схему Н-моста, имеющую первый и второй входы и схему переключения, имеющую вход и выход. Первый вход Н-моста и вход схемы переключения подключены к выходу сигнала ШИМ процессора, а выход схемы переключения подключен ко второму входу Н-моста. Схема переключения инвертирует коэффициент заполнения ШИМ, когда сигнал ШИМ присутствует, и не инвертирует коэффициент заполнения, когда сигнал ШИМ отсутствует. Технический результат - снижение рабочего шума двигателя. 3 н. и 23 з.п. ф-лы, 4 ил.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Данное изобретение относится, в общем, к системам с шаговыми двигателями и касается, в частности, усовершенствованной схемы для привода шагового двигателя и способа управления этой схемой и приводом.
Системы с шаговыми двигателями и приводы таких двигателей известны в данной области техники. Обычные системы с шаговыми двигателями содержат шаговый двигатель и привод двигателя, при этом типичный привод двигателя содержит схему Н-моста. Фиг.1 поясняет выполнение обычной схемы 10 электропривода шагового двигателя.
Аналоговый сигнал напряжения подается в преобразователь 12 "напряжение - коэффициент заполнения", который синхронизируется тактовым генератором 14. Выходной сигнал преобразователя 12 затем подается на первый вход 18 первой схемы И 20 и на первый вход 22 второй схемы И 24. Сигнал фазы подается на соответствующие вторые входы 26, 28 первой и второй схем И 20, 24. Сигнал фазы, поступающий на второй вход 26, сначала проходит через инвертор 30. Выходной сигнал первой схемы И 20 затем подается на вход 32 первой половины 34 Н-моста, а выходной сигнал второй схемы И 24 подается на вход 36 второй половины 38 Н-моста. Соответствующие выходные сигналы половин 34, 38 Н-моста питают обмотки 40 двигателя.
Обычная схема 10 работает, изменяя ток в обмотках 40 двигателя путем активного выбора поочередных токов обмоток, одного за другим, по синусоидальному закону, чтобы управлять двигателем с помощью последовательности дискретных микрошагов. В любой данный момент выбранным током обмотки активно управляет отдельная интегральная схема (не показана). Интегральная схема динамически обеспечивает необходимый ток обмотки, используя управление с замкнутым контуром и обратную связь по току обмотки двигателя. Таким образом, обычные схемы привода шагового двигателя являются в общем системами с обратной связью в отношении того, как они подключены к шаговому двигателю. Такие обычные схемы обладают несколькими недостатками в работе.
Одним из недостатков, имеющих место в обычной схеме 10, является шум. При некоторых значениях микрошага дискретный характер широтно-импульсной модуляции (ШИМ) вызывает возрастание слышимых субгармоник генератора 14. Неточная подстройка частоты генератора вызывает нежелательное слышимое дрожание частоты, или "свист". Кроме того, длинные провода в цепи обратной связи, подключенные к обмоткам шагового двигателя, вызывают нежелательный электрический шум "звона", который также может быть слышимым.
Другой недостаток, имеющий место в схеме 10, возникает, когда переключается управление фазой. В идеальном случае фаза должна переключаться, когда ток через обмотки 40 двигателя равен нулю. Однако при типичных рабочих скоростях двигателя всегда имеется по меньшей мере некоторая конечная величина тока, протекающего через обмотки 40, вследствие индуктивной природы этих обмоток. Переключение полярности тока, когда ток в действительности не равен нулю, заставляет вал двигателя (не показан) вращаться неравномерно. Неравномерное вращение приводит к увеличенным вибрациям в двигателе, что еще более увеличивает создаваемый слышимый шум.
Еще один недостаток, имеющий место в схеме 10, проистекает из того факта, что Н-мосты имеют "мертвую зону", когда напряжение, питающее обмотки 40 двигателя, переходит через нулевой уровень. Мертвая зона вызывает заметные и нежелательные паузы в движении двигателя при низких скоростях вращения вала. Пауза приводит к толчкообразному вращению вала двигателя, что делает трудным или даже невозможным точное позиционирование вала двигателя в районе мертвой зоны. Переходы через мертвые зоны также еще более увеличивают создаваемый шум, испытываемый двигателем.
Пример способа уменьшения шума шагового двигателя описан в патенте США №5440214. В этом патенте описывается электропривод с широтно-импульсной модуляцией (ШИМ) напряжения, который, используя синхронизацию ШИМ, генерирует синусоидальный сигнал питания, аппроксимирующий синусоиду с использованием дискретных уровней. Прямое линейное кодирование каждого шага синхронизации ШИМ осуществляется в центральном процессоре (CPU), чтобы генерировать аппроксимирующий импульс ШИМ, соответствующий необходимому синусоидальному сигналу. Используется одна скорость привода для бесшумной работы и система с обратной связью для динамического измерения характеристик и управления шаговым двигателем.
Дискретный односкоростной способ работы, описанный в этом патенте, хотя и полезен для балансирования коэффициента заполнения сигнала ШИМ, не способен обеспечить компенсацию для различных или переменных рабочих скоростей привода. Этот способ не способен также обеспечить компенсацию аномалий мертвой зоны в пределах шага привода и поэтому не позволяет точно позиционировать двигатель при низких скоростях привода, когда действие инерции системы слабее и поэтому не способно маскировать аномалии мертвой зоны.
Другая схема привода шагового двигателя описана в патенте США №5977737. Используется схема привода в виде Н-моста, управляемая с помощью системы с обратной связью, которая использует предсказываемое значение тока двигателя. Предсказываемый ток двигателя рассчитывается на основе полученных опытным путем характеристик самого двигателя и измеряемых значений угловой скорости двигателя и физического угла. Подобно патенту США №5440214 здесь также требуются динамические измерения некоторых переменных в системе с обратной связью, что может создавать нежелательный шум.
Соответственно, желательно сконструировать схему привода для системы с шаговым двигателем, которая уменьшает рабочий шум двигателя, а также устраняет проблемы, связанные с обратной связью, аномалиями мертвой зоны и переключением сигналов с ограниченным током. Схема должна работать в непрерывном диапазоне скоростей вращения вала двигателя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вышеперечисленные цели достигаются в предложенной схеме привода для системы с шаговым двигателем. Основные преимущества этой схемы включают разомкнутую систему управления и схему переключения, которая может обеспечить как инвертирование фазы ШИМ, так и защиту от потери ШИМ посредством аппаратных средств самой схемы. Способ управления двигателем дополнительно корректирует существенные аномалии, испытываемые обычными системами электропривода.
Более конкретно, данное изобретение предлагает схему привода для шагового двигателя, которая использует процессор, формирующий на выходе сигнал ШИМ. Схема привода содержит схему Н-моста, имеющую первый и второй входы, и схему переключения, имеющую вход и выход. Первый вход Н-моста и вход схемы переключения подключены к выходу сигнала ШИМ процессора, а выход схемы переключения подключен ко второму входу Н-моста. Схема переключения инвертирует коэффициент заполнения сигнала ШИМ, когда сигнал ШИМ присутствует, и не инвертирует коэффициент заполнения, когда сигнал ШИМ отсутствует.
В другой форме осуществления изобретения предусматривается система с шаговым двигателем, которая содержит шаговый двигатель, схему привода двигателя для питания шагового двигателя, схему переключения и процессор. Схема привода двигателя имеет первый и второй входы управления, а схема переключения имеет вход и выход. Вход схемы переключения подключен к первому входу управления, а выход схемы переключения подключен ко второму входу управления. Процессор подает сигнал ШИМ на первый вход управления и вход схемы переключения, и схема переключения функционирует как инвертирующая схема, когда присутствует сигнал ШИМ, и как буферная схема для схемы привода двигателя, когда сигнал ШИМ отсутствует.
В еще одной форме осуществления изобретения предлагается способ управления шаговым двигателем, имеющим схему привода двигателя. Согласно этому способу предсказывается угловое ускорение вращающегося вала двигателя и вычисляется угловое положение вала на основе предсказанного ускорения вала. Затем текущее значение отклонения рассчитанного положения вала предсказывается на основании рассчитанного положения вала. Скорость вращения вала двигателя также вычисляется на основании предсказанного ускорения вала, и предсказанное текущее значение отклонения затем подстраивается на основании вычисленной скорости вращения вала. Подстроенное значение отклонения корректируется с учетом аномалии пересечения нулевого уровня и затем подается на схему привода двигателя.
При нормальных нагрузках двигателя и стандартных скоростях данное изобретение особенно эффективно для устранения шума работающего двигателя, также позволяя двигателю работать плавно в непрерывном диапазоне рабочих скоростей.
ПЕРЕЧЕНЬ ЧЕРТЕЖЕЙ
На фиг.1 показана принципиальная схема обычного привода.
На фиг.2 показана блок-схема системы с шаговым двигателем согласно одной из форм осуществления данного изобретения.
На фиг.3 показана принципиальная схема схемы переключения, изображенной на фиг.2.
На фиг.4 показана блок-схема способа вычисления значения ШИМ согласно другой форме осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Обратимся теперь к фиг.2 и 3. Система с шаговым двигателем подходящего для использования в данном изобретении типа в целом обозначена как 50 и содержит шаговый двигатель 52 и привод 54 двигателя для управления шаговым двигателем. Шаговый двигатель 52 предпочтительно является двухфазным двигателем, а привод 54 двигателя - предпочтительно схемой Н-моста, которая известна в данной области техники. Привод 54 двигателя содержит отдельные первый и второй приводы 56 и 58 соответственно для питания обоих соответствующих концов обмотки 60 двухфазного двигателя 52. Управляющий сигнал напряжения с ШИМ подается непосредственно от центрального процессора 62 управления приводом на вход 64 первого привода 56 привода 54 двигателя, как лучше всего видно на фиг.3.
Тот же самый сигнал ШИМ подается также непосредственно от центрального процессора 62 на вход 66 схемы 68 переключения. Схема 68 переключения предпочтительно содержит в качестве своих основных компонентов логическую схему 70 исключающее ИЛИ и схему 72 накачки заряда (схему с переключаемыми конденсаторами). Первый вход 74 схемы 70 исключающее ИЛИ подключен непосредственно к входу 66 схемы переключения, таким образом на него также подается сигнал ШИМ. Первый вход 74 схемы 70 исключающее ИЛИ подключен ко второму входу 76 схемы исключающее ИЛИ через последовательное соединение входного конденсатора 78 и первого регулирующего диода 80; оба этих компонента являются частями схемы 72 накачки заряда. Остальная часть схемы 72 накачки заряда предпочтительно содержит второй регулирующий диод 82, включенный между землей и точкой соединения первого входного конденсатора 78 с первым регулирующим диодом 80, а также выходной конденсатор 84 и стабилизирующий нагрузочный резистор 86; оба этих компонента включены в параллель между вторым входом 76 схемы исключающее ИЛИ и землей. Выход 88 схемы исключающее ИЛИ предпочтительно подключен непосредственно к входу 90 второго привода 58.
Программа управления приводом для управления приводом 54 двигателя и схемой 68 переключения исполняется центральным процессором 62, считывающим ее из памяти 92 для программы. Синусоидальная форма сигнала для привода 54 двигателя хранится в таблице 94 синусов, которая может быть частью памяти 92 или отдельным компонентом памяти, доступным центральному процессору 62 (фиг.2). Программа управления приводом и работа центрального процессора 62 и компонентов памяти рассматриваются ниже со ссылкой на фиг.4.
Схема 68 переключения предпочтительно может выполнять несколько функций для привода 54 двигателя. Согласно этой предпочтительной конфигурации схема 68 переключения функционирует как схема инвертирования фазы сигнала ШИМ для первого и второго приводов 56, 58, питая один из концов обмотки 60 двигателя сигналом, находящимся в противофазе с сигналом, подаваемым на другой ее конец, когда присутствует сигнал ШИМ. Сигнал ШИМ считается присутствующим, когда он обеспечивает переключение с периодической частотой и с соответствующим коэффициентом заполнения. Схема 68 переключения работает так же, как схема защиты от потери ШИМ, которая отключает привод 54 двигателя, когда сигнал ШИМ отсутствует. Отключение привода 54 двигателя предотвращает протекание чрезмерно больших токов через привод двигателя и шаговый двигатель 52.
Вместо того чтобы переключать направление Н-моста (то есть направление тока, который будет течь в обмотке двигателя, подключенного к Н-мосту), каждый полупериод синусоиды, как это традиционно делается, в данном изобретении направление Н-моста переключается с намного более высокой частотой, предпочтительно 19,5 кГц. Частота 19,5 кГц является достаточно низкой, с точки зрения максимального числа шагов для аппроксимации чисто синусоидального сигнала, но достаточно высокой для того, чтобы находиться вне звукового диапазона, воспринимаемого человеческим слухом. Таким образом, коэффициент заполнения переключающего колебания с частотой 19,5 кГц используется для управления направлением и величиной тока в обмотках двигателя. Коэффициент заполнения сигнала управления с частотой 19,5 кГц, равный 50%, при этом предпочтительно соответствует нулевому току обмотки. Аналогично, коэффициент заполнения 0% будет соответствовать максимальному току обмотки в одном направлении, а коэффициент заполнения 100% - максимальному току обмотки в другом направлении.
Согласно данному изобретению синусоидальный ток в обмотках шагового двигателя 60 формируют, изменяя по синусоидальному закону коэффициент заполнения сигнала с частотой 19,5 кГц, коммутирующего Н-мост, где коэффициент заполнения 50% также представляет нулевое напряжение на обмотках. Величина синусоидального отклонения коэффициента заполнения от 50% ("качание") соответствует амплитуде синусоидального сигнала. С другой стороны, частота синусоидального отклонения коэффициента заполнения соответствует скорости вращения ведущего вала шагового двигателя, при этом один период синусоиды соответствует одному шагу. Чем выше частота синусоидального изменения сигнала управления Н-мостом, тем выше скорость вращения вала двигателя. Эта конфигурация допускает прямое управление приводом 54 двигателя и схемой 68 переключения с помощью напряжения, что в свою очередь позволяет данному изобретению эффективно функционировать при любой скорости вращения двигателя.
Прямое биполярное управление с помощью напряжения обеспечивается питанием каждого конца обмотки 60 шагового двигателя сигналом, находящимся в противофазе с сигналом другого конца, и применением 50%-ного коэффициента заполнения ШИМ в качестве состояния привода при нулевом напряжении. Коэффициент заполнения, превышающий 50%, вызовет протекание положительного тока через обмотку 60, в то время как коэффициент заполнения, меньший 50%, вызовет протекание отрицательного тока. В этой конфигурации нет дополнительной необходимости переключать фазу тока обмотки. Одна сторона обмотки 60 питается непосредственно сигналом ШИМ (через первый привод 56), в то время как другая сторона питается (через второй привод 58) инвертированным сигналом ШИМ от схемы 68 переключения, когда присутствует ШИМ. Эта конфигурация позволяет в данном изобретении посредством упрощенных аппаратных средств осуществлять инвертирование, которое при обычном способе необходимо программировать в программе центрального процессора.
При прямом управлении напряжением согласно данному изобретению напряжение подается на обмотку 60 двигателя, когда ШИМ присутствует, при этом каждый конец обмотки находится в противофазе с другим концом. Однако, когда ШИМ отсутствует (пропадает), предпочтительная конфигурация схемы 68 переключения выполняет также функцию защиты от пропадания ШИМ.
ШИМ может пропадать, когда центральный процессор инициализируется и мгновенный ток очень высок или просто когда выполнение программы управления двигателем останавливается по какой-либо причине. Особенно важно в таких случаях предохранить шаговый двигатель 52 и привод 54 двигателя от получающихся в результате больших токов. Предпочтительная конфигурация схемы 68 переключения и схемы 72 накачки заряда позволяет схеме накачки заряда прекратить функционировать, когда ШИМ отсутствует. В таком случае логическое состояние второго входа 76 схемы исключающее ИЛИ станет "низким" и схема 68 переключения будет работать как простой буфер. Соответственно, напряжение (высокое или низкое), прикладываемое к каждому из концов обмотки 60, будет одинаковым и поэтому никакой ток не будет течь через обмотку; таким образом предотвращаются чрезмерные токи и, в частности, предотвращается повреждение ими двигателя 52.
Прямое управление с использованием управляющего напряжения также позволяет получать опорный сигнал синхронизации ШИМ (не показан) от стабильного кварцевого генератора, что в известных способах обычно невозможно. Нежелательный шум, как таковой, можно также еще более уменьшить согласно данному изобретению, особенно когда управляющее напряжение более точно аппроксимирует чистую синусоиду, как в рассматриваемом ниже случае. Разомкнутая конфигурация системы согласно данному изобретению также предполагает, что никакая обратная связь от двигателя 52 к центральному процессору 62 или от двигателя к приводу 54 двигателя не требуется.
Прямое управление с использованием управляющего напряжения без обратной связи также позволяет в данном изобретении избежать проблем, связанных с использованием замкнутых систем с обратной связью по току. Устраняются избыточные электрические соединения, необходимые для обратной связи. Аномалии мертвой зоны корректируются в центральном процессоре 62 с помощью предыскажения синусоидального отклонения коэффициента заполнения так, что переход через точку 50%-ного коэффициента заполнения (нулевую точку) происходит более быстро при низких скоростях вращения вала. Когда скорость вращения вала двигателя увеличивается, этот эффект уменьшается и в конечном счете устраняется, так как он становится ненужным. Такое предыскажение происходит в реальном времени, когда двигатель работает в зависимости от скорости вращения вала двигателя. Следует отметить, что эта зависимость в реальном времени не образует управление с замкнутым контуром или с обратной связью, так как скорость вращения вала двигателя рассчитывается программой управления шаговым двигателем, а не измеряется на самом деле у физического двигателя.
Предсказанная (расчетная) скорость вращения вала полезна для компенсации других проблем приводов шаговых двигателей, обнаруженных авторами данного изобретения. Одной из таких проблем является то, что эффективная амплитуда синусоидального сигнала управления должна увеличиваться с увеличением частоты сигнала управления, чтобы компенсировать возрастание импеданса обмотки, обусловленное индуктивными свойствами обмотки 60. Когда частота увеличивается, увеличивается также и полное сопротивление. Если амплитуда сигнала управления не увеличивается с частотой, то увеличение скорости вращения вала приводит к уменьшению крутящего момента двигателя 52, что является нежелательным. Данное изобретение автоматически и эффективно компенсирует эту потерю крутящего момента, используя предсказанную скорость вала двигателя для автоматической подстройки амплитуды отклонения коэффициента заполнения для привода 54 двигателя (Н-моста).
Обратимся теперь к фиг.4, на которой показано вычисление подстройки для сигнала ШИМ, подаваемого на привод 54 двигателя (и схему 68 переключения), что предпочтительно выполняется путем программирования центрального процессора 62, памяти 92 для хранения программы и/или таблицы 94 синусов. Управляющий сигнал напряжения ШИМ предпочтительно позволяет шаговому двигателю 52 делать микрошаги с 1024 дискретными шагами на полный шаг двигателя, чтобы гладко аппроксимировать чистую синусоиду.
На этапе S1 предсказывается угловое ускорение (α) вала (не показан) двигателя 52. Предсказанное значение α определяется путем анализа или желаемого угла поворота вала в сравнении с предсказываемым отклоненным углом поворота вала для контроллера положения, или желаемой скорости вращения вала в сравнении с предсказываемой отклоненной скоростью вала для контроллера скорости вращения. Эти предсказываемые отклоненные значения предварительно определяются опытным путем согласно ожидаемым известным характеристикам самого двигателя 52 и предпочтительно считываются из памяти 92 программ или таблицы 94 синусов центральным процессором 62.
Эти желаемые значения (положения или скорости) представляют идеальные значения, которых система 50 с шаговым двигателем должна достигнуть при эксплуатации. Предсказываемые значения, с другой стороны, представляют ожидаемые отклонения, наблюдаемые для систем с двигателями этих типов. Авторы данного изобретения обнаружили, что эти предсказываемые значения адекватно и точно заменяют фактические, динамически измеренные значения углового положения и/или скорости при нормальных скоростях и нагрузках привода для таких систем с шаговыми двигателями. Хотя данное изобретение устраняет потребность в каких-либо действительных динамических измерениях во время работы такого устройства, одно фактическое калибровочное измерение предпочтительно выполняется при инициализации или запуске устройства, чтобы физически измерить характеристики и откалибровать устройство перед обычной эксплуатацией.
На этапе S2 вычисляется угол поворота или позиция (θ) вала. Вычисление позиции вала основано на текущей скорости вращения (ω), предыдущем угловом положении (θLast) и желаемом ускорении α. Следующая формула соответствует основному уравнению кинематики для вычисления нового положения:
θ = θLast + ω*t + 1/2α * t2.
На этапе S3 по вычисленному новому положению вала θ определяют индекс поиска для таблицы синусов шагового двигателя. В предпочтительной форме осуществления изобретения внутренняя переменная для положения вала двигателя θ фактически масштабируется с увеличением в 212 (или 4096) раз. Единицами θ предпочтительно также являются микрошаги, а не градусы. Согласно этой форме осуществления изобретения значение θ может быть непосредственно преобразовано в индекс таблицы 94 синусов простым делением θ на 4096 (или на учетверенное число микрошагов в шаге).
На этапе S4 предсказывается текущее отклонение положения вала. Необходимое напряжение обмотки двигателя (для каждой фазы обмотки 60 двигателя) считывается из таблицы 94 синусов. Это считываемое напряжение представляется числом, называемым Амплитудой. Амплитуда является восьмиразрядным числом со знаком (положительным или отрицательным) и соответствует качанию коэффициента заполнения, рассмотренному выше. Другими словами, Амплитуда определяется в пределах следующих границ:
-255 < Амплитуда < 255.
Таким образом, изменение Амплитуды в зависимости от положения вала 8 представляет чистое (аппроксимированное) синусоидальное изменение. Следовательно, в таблице 94 синусов имеется 1024 записей для каждого шага шагового двигателя 52. Другими словами, шаговый двигатель 52 работает в микрошаговом режиме с 1024 микрошагами на каждый полный шаг.
На этапе S5 текущая угловая скорость вала ω рассчитывается согласно предсказанному ускорению α вала, а предсказанное отклонение положения вала (значение ШИМ) подстраивается на основании рассчитанной скорости ω.
Сначала "Подстройка Частоты ШИМ" определяется умножением Амплитуды, полученной из таблицы 94 синусов, на "Масштабный Коэффициент". Масштабный Коэффициент определяется на основе вычисленной угловой скорости ω вала и динамически изменяется как функция скорости вращения вала согласно следующей формуле:
Масштабный Коэффициент = Опорный Уровень + (Наклон * ω).
Масштабный Коэффициент компенсирует потерю крутящего момента, описанную выше, чтобы поддерживать крутящий момент двигателя в основном постоянным, когда скорость вращения изменяется. Опорный Уровень и Наклон представляют собой определяемые опытным путем характеристики самого шагового двигателя 52. Опорный Уровень определяет ток двигателя при нулевой скорости вала. Наклон является коэффициентом для компенсации индуктивной составляющей импеданса обмотки 60. Этот импеданс увеличивается по мере возрастания частоты привода, являясь линейной функцией индуктивности обмотки. Эффектом применения Наклона поэтому является поддержание тока обмотки относительно постоянным при изменении скорости. Таким образом, расчетный Масштабный Коэффициент является линейной функцией угловой скорости вала двигателя, подстраиваемой для компенсации индуктивной составляющей полного сопротивления и масштабируемой для получения постоянного крутящего момента двигателя.
Важно заметить, что точное значение максимального тока обмотки зависит как от напряжения источника питания, так и от скорости вращения вала ω. Природа электронных схем приводов этого типа такова, что при конкретном напряжении источника питания ток в обмотках двигателя обычно увеличивается по мере уменьшения скорости вращения вала вследствие индуктивной составляющей импеданса обмоток двигателя. С другой стороны, приведенные здесь вычисления программными средствами автоматически корректируют этот эффект "на лету", подстраивая Масштабный Коэффициент в зависимости от скорости вращения вала ω. Масштабный Коэффициент начинается с минимального значения Опорного Уровня и затем увеличивается как функция скорости вращения вала.
"Подстройка Частоты ШИМ" тогда может быть рассчитана по следующей формуле:
Подстройка Частоты ШИМ = Амплитуда * Масштабный Коэффициент.
"Подстроенное Значение ШИМ" тогда легко определяется по Подстройке Частоты ШИМ следующим образом:
Подстроенное Значение ШИМ = Средняя Точка ШИМ + Подстройка Частоты ШИМ.
Средняя Точка ШИМ является величиной ШИМ при коэффициенте заполнения 50% (нулевое качание), описанном выше. Следовательно, Подстройка Частоты ШИМ является положительным или отрицательным числом, представляющим величину отклонения от средней точки, соответствующей коэффициенту заполнения 50%.
На этапе S6 Подстроенное Значение ШИМ корректируется с учетом аномалии пересечения нулевого уровня. Эта коррекция учитывает аномалию мертвой зоны, описанную выше, которая возникает, когда сигнал напряжения шагового двигателя пересекает нулевую точку или коэффициент заполнения 50%. Коррекция пересечения нулевого уровня (Z-Fix) представляет собой коэффициент намеренного искажения, который динамически "на лету" прикладывается к Подстроенному Значению ШИМ перед тем, как оно подается на привод 54 двигателя (и схему 68 переключения). Коэффициент коррекции Z-Fix обеспечивает компенсацию эффекта заметной временной задержки, испытываемой валом двигателя на низких скоростях вращения при переходе через нулевую точку (реверсировании коэффициента заполнения).
Прежде всего определяется Нулевой Масштабный Коэффициент по следующей формуле:
Нулевой Масштабный Коэффициент = Нулевой Опорный Уровень - (Нулевой Наклон * ω).
Характеристики Нулевой Опорный Уровень и Нулевой Наклон определяются опытным путем для конкретного двигателя 52 аналогично Опорному Уровню и Наклону на шаге S5. Однако Нулевой Масштабный Коэффициент не может быть отрицательным числом. Нулевой Масштабный Коэффициент будет приравниваться к нулю всякий раз, когда произведение ω и Нулевого Наклона превышает Нулевой Опорный Уровень или равно ему. Другими словами, Нулевой Масштабный Коэффициент исчезает при высоких угловых скоростях вала (больших ω).
Фактический коэффициент коррекции пересечения нулевого уровня Z-Fix тогда может быть рассчитан как функция Амплитуды и Нулевого Масштабного Коэффициента:
Z-Fix = Нулевой Масштабный Коэффициент - ((Нулевой Масштабный Коэффициент/255)*Амплитуда).
Как видно из формулы, Нулевой Масштабный Коэффициент перед перемножением с Амплитудой сначала делится на 255 (что является максимальным значением в таблице 94 синусов). Поэтому коэффициент коррекции Z-Fix является функцией как значения из таблицы 94 синусов, так и скорости вращения вала ω, но, как отмечено выше, Z-Fix будет уменьшаться по мере увеличения скорости и будет равен нулю при очень высоких скоростях вращения вала.
Z-Fix затем добавляется к Подстроенному Значению ШИМ, чтобы получить Откорректированное Значение ШИМ:
Откорректированное Значение ШИМ = Подстроенное Значение ШИМ + Z-Fix.
Следовательно, при высоких скоростях вращения Откорректированное Значение ШИМ будет просто равно Подстроенному Значению ШИМ. Программное обеспечение вывода сигнала здесь корректирует эффект низкоскоростного пересечения нулевого уровня с помощью предыскажения формы сигнала около точки перехода через нуль. Так как эта коррекция необходима только на низких скоростях, предыскажения в конечном счете устраняются, когда скорость вращения вала двигателя возрастает.
На шаге S7 Откорректированное Значение ШИМ подается на привод 54 двигателя (и схему 68 переключения) в качестве текущего сигнала ШИМ.
Как показано выше, эта форма осуществления изобретения эффективно корректирует нескольких аномалий, с которыми обычно сталкиваются в двигателях и приводах таких типов. Благодаря управлению программными средствами в центральном процессоре 62 данное изобретение способно эффективно компенсировать увеличивающийся ток обмотки, поддерживая ток обмотки относительно постоянным при изменении скорости вращения вала. Данное изобретение также эффективно компенсирует аномалии мертвой зоны при пересечении нулевого уровня, которые являются особенно заметными при низких рабочих скоростях двигателя. Возможности коррекции, описанные здесь, обеспечивают также коррекцию заметных эффектов, которые появляются, когда такие устройства работают на скоростях, вызывающих собственный резонанс.
Благодаря этим особенностям данного изобретения шаговым двигателем можно бесшумно и плавно управлять в непрерывном диапазоне рабочих скоростей. Оператор не ограничен единственной или дискретными рабочими скоростями или частотами, заранее задаваемыми в других обычных устройствах.
Хотя в описании были рассмотрены частные формы осуществления схем и способов управления согласно данному изобретению, специалистам в данной области техники будет ясно, что возможны различные изменения и модификации без отступления от идеи изобретения в пределах его объема, охватываемого приводимой ниже формулой изобретения.
1. Схема привода для шагового двигателя с процессором, формирующим сигнал с широтно-импульсной модуляцией (сигнал ШИМ), содержащая:схему Н-моста, первый вход которой соединен с выходом сигнала ШИМ процессора, исхему переключения, вход которой соединен с выходом сигнала ШИМ процессора, а выход соединен со вторым входом указанного Н-моста, при этом указанная схема переключения выполнена с возможностью функционировать как инвертирующая схема для инвертирования сигнала ШИМ с обеспечением подачи на концы обмотки двигателя напряжений, находящихся в противофазе, когда сигнал ШИМ присутствует, и с возможностью функционировать как буферная неинвертирующая схема с обеспечением подачи на концы обмотки двигателя одинаковых напряжений, когда сигнал ШИМ отсутствует.
2. Схема привода по п.1, отличающаяся тем, что она выполнена как схема без обратной связи.
3. Схема привода по п.1, отличающаяся тем, что указанная схема переключения содержит схему накачки заряда и схему ИСКЛЮЧАЮЩЕЕ ИЛИ, один вход которой образует вход схемы переключения, а другой вход соединен с выходом сигнала ШИМ процессора через схему накачки заряда, выполненную с возможностью прекращения ее работы, когда сигнал ШИМ отсутствует.
4. Система с шаговым двигателем, содержащая:шаговый двигатель;процессор исхему привода двигателя по п.1 для управления указанным шаговым двигателем.
5. Система по п.4, отличающаяся тем, что она функционирует как система без обратной связи.
6. Система по п.5, отличающаяся тем, что процессор динамически корректирует сигнал ШИМ при низких скоростях вращения вала шагового двигателя.
7. Система по п.6, отличающаяся тем, что угловое положение вала двигателя калибруется при инициализации или запуске системы.
8. Система по п.4, отличающаяся тем, что схема переключения содержит схему накачки заряда и схему ИСКЛЮЧАЮЩЕЕ ИЛИ, один вход которой образует вход схемы переключения, а другой вход соединен с выходом сигнала ШИМ процессора через схему накачки заряда, выполненную с возможностью прекращения ее работы, когда сигнал ШИМ отсутствует.
9. Система по п.4, отличающаяся тем, что она дополнительно содержитпамять для программы, доступную процессору, итаблицу синусов, доступную процессору.
10. Система по п.4, отличающаяся тем, что таблица синусов хранит значения аппроксимированной чистой синусоиды.
11. Система по п.4, отличающаяся тем, что буферная схема, по существу, предотвращает протекание тока через схему привода двигателя и обмотки шагового двигателя, когда упомянутый сигнал ШИМ отсутствует.
12. Система по п.4, отличающаяся тем, что сигнал ШИМ имеет коэффициент заполнения,причем коэффициент заполнения, равный 50%, представляет нулевое напряжение на обмотках шагового двигателя,коэффициент заполнения, равный 0%, представляет максимальный ток через обмотки в первом направлении, икоэффициент заполнения, равный 100%, представляет максимальный ток через обмотки во втором направлении, противоположном первому направлению.
13. Система по п.12, отличающаяся тем, что первое и второе направления тока переключаются с частотой около 19,5 кГц.
14. Система по п.4, отличающаяся тем, что схема привода двигателя является схемой с прямым управлением напряжением.
15. Система по п.4, отличающаяся тем, что она дополнительно содержит опорный сигнал синхронизации ШИМ, получаемый от стабильного кварцевого генератора.
16. Система по п.4, отличающаяся тем, что один шаг шагового двигателя равен одному периоду синусоиды и включает 1024 микрошага.
17. Способ управления шаговым двигателем, имеющим схему привода шагового двигателя для управления шаговым двигателем, включающий:предсказание углового ускорения вращаемого вала двигателя;вычисление углового положения вала на основании предсказанного ускорения вала;предсказание значения текущего отклонения вычисленного положения вала на основании вычисленного положения вала;вычисление скорости вращения вала двигателя на основании предсказанного ускорения вала;подстройку предсказанного значения текущего отклонения на основании вычисленной скорости вала;коррекцию подстроенного значения отклонения с учетом аномалии пересечения нулевого уровня иподачу откорректированного значения отклонения на схему привода двигателя.
18. Способ по п.17, отличающийся тем, что откорректированное значение отклонения подается на схему привода в виде сигнала ШИМ.
19. Способ по п.17, отличающийся тем, что величина коррекции при указанном выполнении коррекции уменьшается, когда вычисленная скорость вала увеличивается.
20. Способ по п.19, отличающийся тем, что при высоких скоростях вращения вала указанное откорректированное значение отклонения равно указанному подстроенному значению отклонения.
21. Способ по п.17, отличающийся тем, что при предсказании ускорения оно определяется на основании желаемого угла вала в сравнении с предсказываемым отклоненным углом вала для контроллера положения и/или на основании желаемой скорости вала в сравнении с предсказываемой отклоненной скоростью вала для контроллера скорости.
22. Способ по п.21, отличающийся тем, что предсказываемые отклоненные угол вала и скорость определяют опытным путем.
23. Способ по п.17, отличающийся тем, что при указанном вычислении положения вала положение вала вычисляют как сумму предыдущего положения вала, произведения предсказанной скорости вала на время и половины произведения предсказанного ускорения вала на квадрат времени.
24. Способ по п.23, отличающийся тем, что для получения индекса поиска в таблице синусов вычисленное положение вала делят на 4096.
25. Способ по п.17, отличающийся тем, что при указанной подстройке вычисленную скорость вала сначала компенсируют с учетом протекания тока через обмотки шагового двигателя при нулевой скорости вала и/или с учетом индуктивности обмоток.
26. Способ по п.25, отличающийся тем, что крутящий момент шагового двигателя поддерживают в основном постоянным в непрерывном диапазоне скоростей вращения вала.
www.findpatent.ru