





Для намотки эл. моторов используется медный эмалированный провод.ПЭВ-2ПЭТ-155 (температурный индекс 155℃)ПЭТ-180 (т. и. 180℃)Они имеют очень прочное покрытие из модифицированного полиэфира и выдерживают шоковый нагрев провода без повреждения изоляции за 200℃.Такие провода имеют темно-вишневый цвет лака.
Ток и толщина провода:1А - 0.05мм, 3А -0.11мм, 10А-0.25мм, 15А-0.33мм, 20А-0.4мм, 30А-0.52мм, 40А-0.63мм, 50А-0.73мм, 60А-0.89мм,70А-0.92мм, 80А-1.00мм, 90А-1.08мм, 100А -1.16мм
Можно мотать тонким проводом в несколько жил.Преимущества и недостатки:1 - Тонкий провод легче наматывать.2 - Тонкий провод лучше заполняет зубы, тут можно поспорить, из моей практики, мотал одной жилой более толстого сечения чем до этого был намотан мотор при максимальном заполнении зубов в обоих случаях.Мне кажется в тонком проводе очень много сечения уходит на лак, в то время как у толстой жилы только одна проблема с заполняемостью, она не заполняет хорошо углы.3 - Тонкий провод в основном сгорает от перегрева внутренних обмоток, отсутствует достаточный обдув.4 - Вентиляция толстого провода лучше из-за небольшого количества слоев, 1-2 не больше в основном.
Для получения максимального КПД мотора, необходимо стремиться получить как можно меньшее сопротивление обмоток. Чем меньше сопротивление, тем меньше потери в обмотке и тем выше эффективность мотора. Для достижения этой цели необходимо использовать как можно более толстый провод.
Слишком тонкий провод дает большое сопротивление, и вы не сможете пропустить нужный ток через двигатель. Если просто поднять напряжение, по закону Ома произойдет увеличение тока. Но потери в обмотках(нагрев) сильно возрастут , что приведет к разрушению двигателя.Для модельных двигателей обычно используется провод диаметром 0.3-0.6 мм, Скопион сейчас мотают проводом 0.35 в несколько жил.
Расчет сопротивления обмотки двигателя я изложил в в другой теме.Восстанавливаем изоляцию статора.Перед тем как начать мотать мотор необходимо убедиться, что статор сверху полностью покрыт изоляцией (зеленое покрытие), если нет то восстанавливаем изоляцию.
Смола UHU PLUS 300 с порошковым наполнителем, типа окиси цинка.2 Хаммерайт зеленый, краска ,очень хорошо, но очень долго сохнет.
Если повреждения небольшие то густой циакрин 2 - 3 слоя. (Очень плохо держится на металле, не рекомендую.)
На голое железо, зашкурив клею стеклотекстолит 0.3мм а потом по контуру вот такой фрезой не быстрей чем на 10000об, (выше часто ломаются)машинкой типа проксон-дремель, вручную по контуру.hivoltНамотка мотора
Не отрезать провод от катушки если мотаете одной жилой, это сэкономит провод.
Закрепить статор в какое нибудь приспособление, а затем, используя обе руки, наматывать витки с нужным усилием, чтобы обмотки получались более компактными.
Не использовать металлический инструмент для заправки или уплотнения провода, использовать только дерево или пластик. Хорошо подходят пластиковые карты.
Выточить из дерева оправку для выравнивания провода между зубами.Подобные оправки можно делать по ходу намотки мотора.
Чтобы узнать длину провода для одной фазы, необходимо намотать тонким проводом или ниткой необходимое количество витков на один зуб, далее разматываем и измеряем длину, дальше умножаем на количество зубов, это и будет длина провода одной фазы.
Схема намотки статора с 9 зубами
Треугольник соединяйте 1-5, 2-6, 3-4.
Где 1-2-3 начало а 5-6-4 концы. Те применительно к картинке снизу С(начало) будет -1 и далее ведем счет справо на лево до 6го вывода, по такому порядку и соединяем провода.
Основная схема намотки приведена на картинке ниже. Как можно объяснить этот эскиз в текстовом формате?Существует простая форма записи для обозначения намотки:Обычно статор мотается 3 проводами. Назовем их ‘A’, ‘B’ и ‘С’. Если смотреть на статор сбоку, то намотка провода по часовой стрелке будет обозначена заглавной буквой, а намотка против часовой стрелки - маленькой.Таким образом,на схеме намотки 9ти полюсного мотора мы должны мотать все зубья в одном направлении, один за другим что видно в текстовой схеме “ABCABCABC”. Девять букв, по одной букве для каждого зуба.Итак берем провод, оставляем около 10 см, и мотаем первый зуб по часовой стрелке. Затем перекидываем провод на 4й зуб и мотаем его. И в заключение мотаем 7й зуб. Потом вторым проводом мотаем зубья 2, 5 и 8. И в завершение третьим проводом мотаем 3, 6 и 9 зубья.Переход с зуба на зуб изолировать термоусадкой.
Как можно объяснить этот эскиз в текстовом формате?Существует простая форма записи для обозначения намотки:Обычно статор мотается 3 проводами. Назовем их ‘A’, ‘B’ и ‘С’. Если смотреть на статор сбоку, то намотка провода по часовой стрелке будет обозначена заглавной буквой, а намотка против часовой стрелки - маленькой.Таким образом,на схеме намотки 9ти полюсного мотора мы должны мотать все зубья в одном направлении, один за другим что видно в текстовой схеме “ABCABCABC”. Девять букв, по одной букве для каждого зуба.Итак берем провод, оставляем около 10 см, и мотаем первый зуб по часовой стрелке. Затем перекидываем провод на 4й зуб и мотаем его. И в заключение мотаем 7й зуб. Потом вторым проводом мотаем зубья 2, 5 и 8. И в завершение третьим проводом мотаем 3, 6 и 9 зубья.Переход с зуба на зуб изолировать термоусадкой.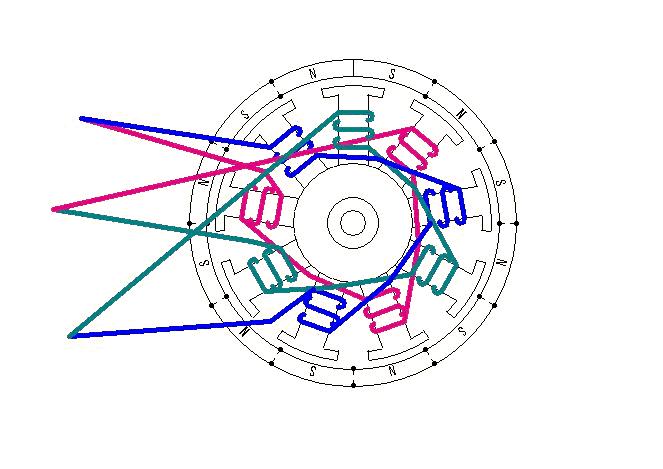
Соединение проводовКроме принципиальной схемы сборки, электродвигатели соединенными звездой, функционируют значительно мягче, чем двигатели, имеющие соединение обмоток в треугольник. Но при соединении звездой электродвигатель не имеет возможности развивать свою полную паспортную мощность. Тогда как, при соединении обмоток в треугольник двигатель всегда работает на полную заявленную мощность, которая почти в полтора раза выше, чем при соединении в звезду. Большим недостатком соединения треугольником являются очень большие величины пусковых токов.
Итак, у нас есть намотанный статор и из него торчит 6 проводов. Три провода из них - это начала обмоток, и 3 другие концы. Необходимо заранее маркировать провода.Есть 6 концов, но только 3 из них подключаются к контроллеру скорости. Теперь, чтобы завершить перемотку необходимо выбрать схему подключения (базируясь на желаемом предназначении мотора).Существует две конфигурации которыми можно соединить выводы статора:Первая называется Звезда (Star или ‘Y’), а вторая - Треугольник (Delta).
 Каждая конфигурация предлагает немного разные свойства и влияет на мощность мотора. Однако, изготовители двигателей еще не решили, какая схема является лучшим вариантом.Диаграммы ниже показывают электрические схемы для этих соединений.
Каждая конфигурация предлагает немного разные свойства и влияет на мощность мотора. Однако, изготовители двигателей еще не решили, какая схема является лучшим вариантом.Диаграммы ниже показывают электрические схемы для этих соединений.
 После этих картинок, сразу понятно почему эти схемы так называются.
После этих картинок, сразу понятно почему эти схемы так называются.
Как правило, соединение “Треугольник” выбирается, если вы хотите получить высоко оборотистый мотор и соединение “Звездой” используется для получения более низких оборотов двигателя и позволяет использовать большие винты.
Если рассмотреть соединение Треугольником и подать напряжение на два вывода, во всех обмотках потечет ток. Для демонстрации того как ток распределиться между обмотками, предположим, что сопротивление одной фазы равно 1 Ом. В этом случае, у нас есть фаза А в 1 Ом, соединенная в паралель с 2мя другими фазами B и С (B и С соединены последовательно) сопротивлением в 2 Ома. По закону Ома можно подсчитать, что 2/3 всего тока пойдут через фазу А и оставшаяся 1/3 пойдет через фазы B и C. Результирующее сопротивление которое увидит контроллер будет 0,66 Ом.
Если мы соединим выводы по схеме Звезда, то весь ток будет всегда идти через 2 фазы в любой момент времени.Результирующее сопротивление для регулятора будет 2 Ома.
Если мы нагрузим мотор напряжением в 10В, то получим ток около 15А при соединении Треугольником и всего лишь 5А при соединении Звездой. Надо сказать, что соединение треугольником в данном случае дает большую мощность. Так-же, мы получим большие токи, но усилие для поворачивания большого винта может оказаться недостаточным. Можно подать на мотор большее напряжение и все же заставить этот винт крутиться, но возможно, что мотор от этого опять сгорит.
Обороты и напряжение (об/В)
От того как вы намотаете мотор будет зависеть с какими оборотами он будет крутиться и какую батарею вам придется использовать для получения нужной тяги.Если взять мотор без винта и дать полный газ на, скажем, 6В, мотор будет крутить на своих максимальных оборотах.Если измерить эти обороты и поделить их на напряжение батареи, мы получим характеристику называемую Обороты на Вольт (RPM per Volt). После того как мы узнали эту характеристику мы уже сможем сказать, как быстро мотор будет крутить на нужном нам напряжении.
Например, наш мотор крутит 8000 Оборотов на 6В.
8000 / 6 = 1333 Об/в
В этом случае с батареей на 10В мотор будет выдавать 13330 Оборотов.Эта характеристика помогает нам понять на что способен наш мотор, и подходит ли он для поставленной задачи.Если нам нужен мотор для импеллера, тогда необходимо чтобы мотор имел более высокие Об/В.Для 3D самолетов, необходимо вращать больший винт, и поэтому обычно используют моторы с более низким Об/В.
Под нагрузкой количество оборотов естественно упадет.
Возвращаясь назад к схемам Треугольника и Звезды. Имеется зависимость между этими двумя схемами и расчетом характеристики Об/В. Если вы соединили мотор звездой и измерили его обороты, вы можете подсчитать какие Об/В получатся при использовании схемы Треугольник и наоборот.
Для перевода от Звезды к Треугольнику надо домножить Об/В на 1.73Для перевода от Треугольника к Звезде - домножить на 0.578
Таким образом, у нас появляется реальный инструмент для изменения характеристик мотора в зависимости от простой схемы подключения. Некоторые моделисты, зашли так далеко, что подключают все 6 проводов к небольшому блоку коммутации, что позволяет им менять схему в любое время.
Итак, как определить/рассчитать необходимое количество витков и оборотов/В перед намоткой двигателя?
Существуют специальные программы для расчета количества витков при определенных размерах статора и толщины зубов для получения нужного количества оборотов. Но в большинстве случаев, мы просто наматываем максимально возможное количество витков и измеряем параметры получившегося мотора. Используя полученные данные, уже можно понять устраивает нас такое положение дел или нет, и что делать для достижения цели. Метод “тыка” тоже работает достаточно хорошо.
Выводы:В качестве инструкции можно привести несколько утверждений:Чем больше витков намотано на зуб, тем большее магнитное поле будет получено на том-же токе.Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов на вольт.Для получения высоких Об/В, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.Соединение Звездой дает больший крутящий момент и меньшее количество Об/В чем соединение Треугольником.
Часть 2. Схемы намотки бесколлекторных двигателейМожно воспользоваться вот этим калькулятором.Пояснения к данной таблице:(A) - мотать по часовой стрелке(a) - мотать против часовой стрелки(-) - оставить зуб пустым (Для LRK схем)Цвета:черный - не работаеторанжевый -работает, но не очень хорошобелый - работаетголубой - работает хорошо
Автор описывает 16 способов намотать одно и тоже на 4 зуба. Во всех случаях зубья намотаны по следующей схеме:Зуб 1 = “A”Зуб 2 = “a” (схема намотки противоположна зубу 1)Зуб 7 = “a”Зуб 8 = “A”Пример нескольких схем намотки(Начала(Anf) и концы(Ende) обмоток отмечены): Простая намотка по методом 1278cw.Схема: AabBCcaABbcCДанная намотка предназначена для соединения звездой.Причем надо соединять вместе надо либо 3 “начала”, либо 3 “конца”.
Простая намотка по методом 1278cw.Схема: AabBCcaABbcCДанная намотка предназначена для соединения звездой.Причем надо соединять вместе надо либо 3 “начала”, либо 3 “конца”. Почти то же самое, но только почти!Все три обмоточных провода, намотаны одним методом.Схема: AaBbCcaAbBcCНа самом деле, намотано НЕПРАВИЛЬНО!С хорошим контроллером, возможно, и будет работать. Однако, будет очень высокий ток нагрузки и очень плохая эффективность.
Почти то же самое, но только почти!Все три обмоточных провода, намотаны одним методом.Схема: AaBbCcaAbBcCНа самом деле, намотано НЕПРАВИЛЬНО!С хорошим контроллером, возможно, и будет работать. Однако, будет очень высокий ток нагрузки и очень плохая эффективность. Схема, почти та же. Что изменилось?Начало и конец “B” (синей) фазы были просто поменяны местами.Получили схему: AabBCcaABbcCИзменения минимальны, но двигатель будет работать очень хорошо.
Схема, почти та же. Что изменилось?Начало и конец “B” (синей) фазы были просто поменяны местами.Получили схему: AabBCcaABbcCИзменения минимальны, но двигатель будет работать очень хорошо. В такой схеме концы и начала обмоток чередуются.Конец “A” следует за началом “B”,конец “B” следует за началом “C” иконец “C” следует за началом “A”.
В такой схеме концы и начала обмоток чередуются.Конец “A” следует за началом “B”,конец “B” следует за началом “C” иконец “C” следует за началом “A”.
В таких условиях, лучше использовать соединение треугольником. Я использую именно эту схему намотки. Часто встречается следующая схема намотки.Она часто рекомендуется, как схема для соединения треугольником.
Часто встречается следующая схема намотки.Она часто рекомендуется, как схема для соединения треугольником. Это лучший (но я предпочитаю верхний) вариант для намотки 10 или 14P 12N моторов.При таком варианте провода наилучшим образом подходят для соединения треугольником.
Это лучший (но я предпочитаю верхний) вариант для намотки 10 или 14P 12N моторов.При таком варианте провода наилучшим образом подходят для соединения треугольником.
Намотка многополюсного мотора в конфигурации 24 зуба / 26 магнитов: Часть 3. Использованием схемы LRK
Часть 3. Использованием схемы LRK
LRK мотор был разработан тремя джентельменами по имени Lucas, Retzback and Kuhfuss. Целью их разработки была попытка получить максимально возможное силовое поле с определенным видом статора и типов манитов. Чем сильнее поле, тем большее крутящий момент можно получить. Количество об.в при этом уменьшается. Это не значит, что LRK моторы не могут выдавать высоких оборотов. Они вполне могут выдавать высокие обороты, которые позволяет выдать ваш контроллер скорости.Для постройки LRK мотора, нам необходим статор с 12ю зубьями. Нельзя использовать статоры с 9ю зубьями. Следующее важное отличие - это схема намотки. Только половина всех зубов наматывается. Это делает намотку двигателя более простой по 2м причинам. Во-первых, надо мотать меньше зубов. И второе - пропущенные зубья позволяют намотать больше витков на зубья которые мы мотаем. В некоторых случаях это сильно помогает.
Итак, рассмотрим схему намотки двигателя LRK:

 Данная схема достаточно проста. Мотаем первый зуб против часовой стрелки, затем переходим к зубу 7 и мотаем в обратном направлении, и так 3 раза. C точки зрения электроники - не важно какие метки стоят на ваших выводах. В данном случае все выводы идентичны друг другу. Поэтому можно смело мотать и не бояться запутаться в будущем.
Данная схема достаточно проста. Мотаем первый зуб против часовой стрелки, затем переходим к зубу 7 и мотаем в обратном направлении, и так 3 раза. C точки зрения электроники - не важно какие метки стоят на ваших выводах. В данном случае все выводы идентичны друг другу. Поэтому можно смело мотать и не бояться запутаться в будущем.
Определяем KV мотора без тахометра.Тестером на конденсаторе подключив между любых двух фаз конденсатор 0.1-0-0.22 мкФ и сопротивление 1-5ком последовательно. В режиме измерения частоты. Результат в гц разделить на 7 (кол-во пар полюсов) и умножить на 60 сек. Получите об/мин. Далее делите на напряжение -получаете кв. Естественно на холостых.hivoltВсе расчеты параметров мотора здесь-Расчет основных параметров бесколлекторного мотора.
Полезные ссылки:1.www.scorpion.powercroco.de2.heli-spb.ru/forumheli/index.php?topic=5243.03.forum.brothers-blog.com/index.php?board=32.04.www.powercroco.de5.www.heli-spb.ru/forumheli/index.php?topic=1161.msg…6.www.ramo-chelny.ru/vidi-obmotok.html7.rcstv.ru/forum/topic/191/lofi/?page=28.www.bavaria-direct.co.za9. Калькулятор.
dev.rcopen.com
Часть 2.
Часть 2. Схемы намотки бесколлекторных двигателей| # кол-во магнитов | # кол-во зубьев статора | Gearing Ratio | |||||
| 3 | 6 | 9 | 12 | 15 | 18 | ||
| 2 | ABC | AbCaBc | AacBBaCCb | AAccBBaaCCbb | AAACCbbbaaCCCbb | AAAcccBBBaaaCCCbbb | 1:1 |
| 4 | ABC | ABCABC | ABaCAcBCb | AcBaCbAcBaCb | AAcBaCCbAcBBaCb | AAcBBaCCbAAcBBaCCb | 2:1 |
| 6 | ABCABCABC | AcBaCbAcBaCbAcBaCb | 3:1 | ||||
| 8 | ABC | ABCABC | AaABbBCcC | ABCABCABCABC | AcaCABabABCbcBc | ABaCAcBCbABaCAcBCb | 4:1 |
| 10 | ABC | AbCaBc | AaABbBCcC | ABCABCABCABCABC | AcabABCbcaCABabcBC | 5:1 | |
| 12 | ABCABCABC | ABCABCABCABCABC AaBbCcAaBbCcAaBbCc A-B-C-A-B-C-A-B-C | 6:1 | ||||
| 14 | ABC | AcBaCb | ACaBAbCBc | AaAaABbBbBCcCcC | AabcCABbcaABCcabBC | 7:1 | |
| 16 | ABC | ABCABC | AAbCCaBBc | ABCABCABCABC | AaAaACcCcCBbBbB | AaABbBCcCAaABbBCcC | 8:1 |
| 18 | 9:1 | ||||||
| 20 | ABC | ABCABC | AbbCaaBcc | AbCaBcAbCaBc | ABCABCABCABCABC | AaABbBCcCAaABbBCcC | 10:1 |
Пояснения к данной таблице:
(A) - мотать по часовой стрелке
(a) - мотать против часовой стрелки
(-) - оставить зуб пустым (Для LRK схем)
Цвета:
черный - не работаеторанжевый -работает, но не очень хорошобелый - работаетголубой - работает хорошоБлагодаря нашему пользователю, была открыта замечательная ссылка на способы намотки 12-зубового мотора.
По ней автор описывает 16 способов намотать одно и тоже на 4 зуба. Во всех случаях зубья намотаны по следующей схеме:
Зуб 1 = "A"Зуб 2 = "a" (схема намотки противоположна зубу 1)Зуб 7 = "a" Зуб 8 = "A"Далее, автор приводит в пример несколько схем намотки(Начала(Anf) и концы(Ende) обмоток отмечены):
| Простая намотка по методом 1278cw.Схема: AabBCcaABbcC Данная намотка предназначена для соединения звездой. Причем надо соединять вместе надо либо 3 "начала", либо 3 "конца". |
| Почти то же самое, но только почти!Все три обмоточных провода, намотаны по одним методом.Схема: AaBbCcaAbBcCНа самом деле, намотано НЕПРАВИЛЬНО!С хорошим контроллером, возможно, и будет работать. Однако, будет очень высокий ток нагрузки и очень плохая эффективность. |
| Схема, почти также. Что изменилось? Начало и конец "B" (синей) фазы были просто поменяны местами.Получили схему: AabBCcaABbcCИзменения минимальны, но двигатель будет работать очень хорошо. |
| В такой схеме концы и начала обмоток чередуются. Конец "A" следует за началом "B", конец "B" следует за началом "C" иконец "C" следует за началом "A".В таких условиях, лучше использовать соединение треугольником. |
| Часто встречается следующая схема намотки. Она часто рекомендуется, как схема для соединения треугольником.Не совсем понял, что хотел сказать автор, но ясно, что схема работает. |
| По мнению автора, самый лучший вариант для намотки 10 или 14P 12N моторов. При таком варианте провода наилучшим образом подходят для соединения треуголь |
предыдущяя страница 1 2 3 последняя ›
www.reg35.com
Недавно мне пришел двигатель 2211 1700об., не способный раскрутить нужный мне винт. После некоторых тестов был поставлен диагноз: где-то подкорачивает обмотку. Можно было просто оставить его на запчасти но мне захотелось его перемотать. Статей о перемотке двигателей на русском языке очень мало, и вот я, начитавшись заморских сайтов решил написать свое пособие по перемотке бесколлекторных двигателей.
Основным материалом для данной статьи послужили материалы сайта www.gobrushless.com
Итак, начнем. Для начала нужно определиться с проводом для намотки.

Обычно,для намотки двигателей используется медный эмалированный провод. (ПЭВ - 2). Такой провод можно купить на радио рынке и в магазинах с электронными компонентами.
С увеличением мощности мотора, требования к качеству провода сильно возрастают. Для решения этой проблемы некоторые используют несколько более тонких проводов вместо одного толстого. В этом есть несколько преимущество:
1 - Толстый провод сложнее наматывать.
2 - На больших частотах возможно появление скин-эффекта (поверхностный эффект) Вкратце, скин эффект это явление, когда электроны, протекающие через медный провод, двигаются только по поверхности провода. В этом случае центральная часть провода просто не используется и превращается в нежелательный вес. Проявляется этот эффект с увеличением частоты.
Применительно к нашим БК моторам этот эффект обсуждался несколько раз. Есть сторонники и того и другого лагеря.
Я думаю, что частоты в наших моторах не так велики и об этом эффекте можно не думать.
Для получения максимального КПД от мотора, необходимо стремиться получить как можно меньшее сопротивление обмоток. Чем меньше сопротивление, тем меньше потери в обмотке и тем выше эффективность мотора. Для достижения этой цели необходимо использовать как можно более толстый провод. Но толстый провод - означает меньшее количество витков и меньший крутящий момент.Пока вам не нужно сделать очень высокоскоростной двигатель, старайтесь намотать как можно больше витков для создания большего крутящего момента.
Слишком тонкий провод дает большое сопротивление, и вы не сможете пропустить нужный ток через двигатель. Если просто поднять напряжение, по закону Ома произойдет увеличение тока. Но потери в обмотках(нагрев) сильно возрастут , что приведет к разрушению двигателя. Т.е. для получения нужной мощности - необходимо выбирать провод нужного диаметра.
Для модельных двигателей обычно используется провод диаметром 0.3-0.6 мм. Более тонкий провод позволяет намотать больше витков но и имеет большее сопротивление. Определить сопротивления вашего двигателя не так легко как кажется. Не пытайтесь измерить сопротивление менее 1 Ом, если у вас нет специального оборудования. Обычные цифровые мульти-метры не предназначены для измерения таких низких сопротивлений. Чтобы сделать жизнь немного проще, можно прогнозировать, сопротивление вашего двигателя путем измерения общей длины провода, а затем рассчитывать сопротивление, используя данные из таблицы. Таким образом, можно получить представление о том, какое сопротивление будет имеет ваш двигатель.
Я зашел в магазин "Чип и Дип" и купил катушку провода 0.4 мм фирмы velleman. Надо сказать, что катушка 67 метров стоит 500 р при простом походе в магазин и 380 р при заказе через интернет. Так, что есть смысл сделать пред-заказ.

Перемотка моторов - дело непростое. Потребуется довольно много практики, чтобы получилось красиво и качественно. В первый раз может потребоваться очень много времени. Намотать 20 витков тонким проводом на зуб может оказаться довольно просто, но мы пытаемся намотать от 10 до 30 витков соответствующей толстой проволокой, что не всегда так просто.
Хитрость заключается в том, чтобы закрепить статор в какое нибудь приспособление, а затем, используя обе руки, наматывать витки с нужным усилием, чтобы обмотки получались более компактными. Это чрезвычайно важно, так как первый слой обмотки должны поддерживать следующие один или два слоя. Если первый слой намотан свободно, следующий слой может ложиться между обмотками первого слоя. Это создает общий беспорядок, и вы никогда не получите максимальное количество витков на зуб.Правильно намотанный зуб имеет плотно уложенные слои и витки, которые должны выглядеть красиво и опрятно.
Для достижения такого результата необходимо много практики!
Основная схема намотки приведена на картинке ниже.
Эта схема одна из самых простых с физической и логической точки зрения. Основной проблемой является подсчет количества намотанных витков. По началу вы будете постоянно сбиваться со счета, но это пройдет с практикой.
Как можно объяснить этот эскиз в текстовом формате?
Существует простая форма записи для обозначения намотки:
Обычно статор мотается 3 проводами. Назовем их 'A', 'B' и 'С'. Если смотреть на статор сбоку, то намотка провода по часовой стрелке будет обозначена заглавной буквой, а намотка против часовой стрелки - маленькой.
Таким образом,на схеме намотки 9-ти полюсного мотора мы должны мотать все зубья в одном направлении, один за другим что видно в текстовой схеме "ABCABCABC". Девять букв, по одной букве для каждого зуба.
Итак берем провод, оставляем около 10 см, и мотаем первый зуб по часовой стрелке. Затем перекидываем провод на 4-й зуб и мотаем его. И в заключение мотаем 7-й зуб. Потом вторым проводом мотаем зубья 2, 5 и 8. И в завершение третьим проводом мотаем 3, 6 и 9 зубья.
Итак возьмем наш моторчик, и удалим с него старый провод. Он был намотан проволокой 0.3 мм. Количество витков на оригинале было 24. (Как китайцы умудряются столько витков намотать? не представляю )) )


Теперь отмотаем метр провода 0.4 мм и попробуем намотать по приведенной выше схеме:



Переход с зуба на зуб я заизолировал термоусадкой (где-то вычитал....)
Итак, у нас есть намотанный статор и из него торчит 6 проводов. Три провода из них - это начала обмоток, и 3 другие концы. ... Вы не уверены какие из них какие? В этом случае, необходимо было заранее маркировать провода в каком либо формате, чтобы пометить их начало. Для этого можно использовать кусочки скотча с надписанными буквами или скотч разного цвета.
Итак, у нас есть 6 концов, но только 3 из них подключаются к контроллеру скорости. Теперь, чтобы завершить перемотку необходимо выбрать схему подключения (базируясь на желаемом предназначении мотора).
Существует две конфигурации которыми можно соединить выводы статора:
Первая называется Звезда (Star или 'Y'), а вторая - Треугольник (Delta).
Каждая конфигурация предлагает немного разные свойства и влияет на мощность мотора. Однако, изготовители двигателей еще не решили, какая схема является лучшим вариантом.
Диаграммы ниже показывают электрические схемы для этих соединений.
После этих картинок, сразу понятно почему эти схемы так называются.
Как правило, соединение "Треугольник" выбирается, если вы хотите получить высоко оборотистый мотор и соединение "Звездой" используется для получения более низких оборотов двигателя и позволяет использовать большие винты. В следующем разделе эта разница будет рассмотрена более подробно.
Если рассмотреть соединение Треугольником и подать напряжение на два вывода, во всех обмотках потечет ток. Для демонстрации того как ток распределиться между обмотками, предположим, что сопротивление одной фазы равно 1 Ом. В этом случае, у нас есть фаза А в 1 Ом, соединенная параллельно с 2-мя другими фазами B и С (B и С соединены последовательно) сопротивлением в 2 Ома. По закону Ома можно подсчитать, что 2/3 всего тока пойдут через фазу А и оставшаяся 1/3 пойдет через фазы B и C. Результирующее сопротивление которое увидит контроллер будет 0,66 Ом.
Если мы соединим выводы по схеме Звезда, то весь ток будет всегда идти через 2 фазы в любой момент времени.
Результирующее сопротивление для регулятора будет 2 Ома.
Если мы нагрузим мотор напряжением в 10 В, то получим ток около 15 А при соединении Треугольником и всего лишь 5 А при соединении Звездой. Надо сказать, что соединение треугольником в данном случае дает большую мощность. Так-же, мы получим большие токи, но усилие для поворачивания большого винта может оказаться недостаточным. Можно подать на мотор большее напряжение и все же заставить этот винт крутиться, но возможно, что мотор от этого опять сгорит.
В качестве примера:
Предположим, что у нас есть мотор он винчестера, и мы хотим получить от него необходимую тягу для 72" Piper Cub самолета. Чтобы мотор мог выдерживать большие токи, будем использовать 0.6 мм провод. После непродолжительных мучений, стало понятно, что больше 10-11 витков намотать этим проводом не получается.
Сначала, я соединил его звездой (т.к. я хотел получить больший крутящий момент). На 3-х банках LiPo, с нужным мне пропеллером, удалось получить ток всего в 10 А. Мощности мотора было явно мало и хотелось получить больше.
Мотор был переконфигурирован под схему Треугольник, что дало больше мощности. Больше тяги для полета, но вместе с этим и достаточно высокие токи, чтобы спалить мотор.
Что же делать в этой ситуации?
Самый верный способ, это подбор батареи с нужным напряжением. Соединение Звездой может спокойно потянуть 4 банки лития и в этой конфигурации выдать требуемую тягу. Для соединения треугольником, наоборот - необходимо уменьшить количество банок батареи.
В результате обе конфигурации выдадут примерно одну и ту-же мощность. (как ни крути)
От того как вы намотаете мотор будет зависеть с какой скоростью он будет крутиться и какую батарею вам придется использовать для получения нужной тяги.
Если взять мотор без винта и дать полный газ на, скажем, 6 В, мотор будет крутить на своих максимальных оборотах.
Если измерить эти обороты и поделить их на напряжение батареи, мы получим характеристику называемую Обороты на Вольт (RPM per Volt). После того как мы узнали эту характеристику мы уже сможем сказать, как быстро мотор будет крутить на нужном нам напряжении.Например, наш мотор крутит 8000 Оборотов на 6В. 8000 / 6 = 1333 Об/в В этом случае с батареей на 10 В мотор будет выдавать 13330 Оборотов.
Эта характеристика помогает нам понять на что способен наш мотор, и подходит ли он для поставленной задачи.
Если нам нужен мотор для импеллера, тогда необходимо чтобы мотор имел более высокие Об/В.
Для 3D самолетов, необходимо вращать больший винт, и поэтому обычно используют моторы с более низким Об/В.
Под нагрузкой количество оборотов естественно упадет.
Возвращаясь назад к схемам Треугольника и Звезды. Имеется зависимость между этими двумя схемами и расчетом характеристики Об/В. Если вы соединили мотор звездой и измерили его обороты, вы можете подсчитать какие Об/В получатся при использовании схемы Треугольник и наоборот.
Для перевода от Звезды к Треугольнику надо домножить Об/В на 1.73
Для перевода от Треугольника к Звезде - домножить на 0.578
Таким образом, у нас появляется реальный инструмент для изменения характеристик мотора в зависимости от простой схемы подключения. Некоторые моделисты, зашли так далеко, что подключают все 6 проводов к небольшому блоку коммутации, что позволяет им менять схему в любое время.
Итак, как определить/рассчитать необходимое количество витков и оборотов/В перед намоткой двигателя?
Существуют специальные программы для расчета количества витков при определенных размерах статора и толщины зубов для получения нужного количества оборотов. Но в большинстве случаев, мы просто наматываем максимально возможное количество витков и измеряем параметры получившегося мотора. Используя полученные данные, уже можно понять устраивает нас такое положение дел или нет, и что делать для достижения цели. Метод "тыка" тоже работает достаточно хорошо.
Выводы:
В качестве инструкции можно привести несколько утверждений:
Чем больше витков намотано на зуб, тем большее магнитное поле будет получено на том-же токе.
Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов на вольт.Для получения высоких Об/В, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
Соединение Звездой дает больший крутящий момент и меньшее количество Об/В чем соединение Треугольником.
Возвращаясь к моей моторке. Мне удалось намотать всего по 11 витков проволокой 0.4 мм. С таким количеством витков о соединении проводов треугольником можно сразу забыть. Итак, я зачистил эмаль с 3х выводов и спаял их вместе.
Оставшиеся 3 вывода были заправлены в термоусадку. Последним шагом я подпаял 2 мм коннекторы.


Результаты тестов показали следующие характеристики:
Судя по параметрам - получилось где-то 2200 оборотов, тахометра не было под рукой.GWS 6 х 3 тяга 270 грамм 6 АGWS 7 х 3.5 тяга 330 грамм 8.2 А
Результат приемлемый!
www.reg35.com










