





Изобретение относится к области пьезотехники и может быть использовано в линейных пьезоэлектрических двигателях. Сущность: линейный пьезоэлектрический двигатель содержит ползун с направляющими, пьезоприводную систему, источник питания. Пьезоприводная система состоит из замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях. В рамку вставлен и зажат в ней пьезоэлемент продольного удлинения. На концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений. Одно плечо каждого мультипликатора связано с пьезоэлементом поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений. Технический результат: повышение надежности работы устройства, упрощение конструкции и сборки. 1 ил. 
Изобретение относится к области пьезотехники, а именно к области разработки и изготовления линейных пьезоэлектрических двигателей.
Известна пьезоприводная система, состоящая из нескольких пьезоприводов, которые могут последовательно удлиняться и сдвигаться, перемещая подвижной элемент в соответствии с управляющими сигналами (патент US 6977461 ВВ).
Недостатки этого устройства состоят в необходимости изготовления сопрягающихся деталей с очень высокой точностью (доли микрона) и в сложности реализации линейных сдвигов.
Наиболее близким к предлагаемому изобретению является пьезоэлектрический двигатель на основе "перистальтики", состоящий из трех, связанных между собой, пьезоэлектрических цилиндров, надетых на металлический стержень, при этом первый и третий цилиндры охватывают стержень без зазора, а второй - с зазором. При подаче на цилиндры последовательности импульсов напряжения стержень совершает поступательное перемещение в виде последовательности шагов (ТИИЭР, т.66, № 6, июнь 1978).
Недостатки этого устройства заключаются в сложности его изготовления, так как требуется высокая точность изготовления подвижного стержня и сопрягающихся с ним пьезоцилиндров, а также в высокой чувствительности устройства к температурным деформациям стержня и пьезоцилиндров, что снижает надежность его работы.
Задачей, на решение которой направлено настоящее изобретение, является достижение технического результата, заключающегося в повышении надежности устройства, упрощении его конструкции и сборки. Поставленная задача решается в линейном пьезоэлектрическом двигателе, содержащем ползун с направляющими, пьезоприводную систему, источник питания, причем пьезоприводная система состоит из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат пьезоэлемент продольных перемещений, а на концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
Отличительными признаками изобретения являются признаки, характеризующие выполнение пьезоприводной системы, состоящей из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат в ней пьезоэлемент продольных перемещений, а на концах рамки выполнены упруго связанные с ней рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо упруго вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
Указанная совокупность отличительных признаков позволяет достичь технического результата, заключающегося в повышении надежности работы устройства и упрощении его конструкции.
Сущность изобретения поясняется чертежом, где показана конструкция устройства.
Устройство содержит ползун 1 с направляющими А, пьезоприводную систему, состоящую из замкнутой рамки 2 с упругим элементом 3 в виде двух плоских пружин на ее боковых гранях, пьезоэлемента 4 для продольных перемещений, вставленного в рамку 2 и жестко зажатого в ней винтом 5, рычажных мультипликаторов линейных перемещений 6, 7, 8, 9 и поджатых винтами 16, 17.
Пьезприводная система вставлена противоположными концами рычагов мультипликаторов с натягом в направляющие А ползуна 1 и взаимодействует с ним в точках 18, 19, 20, 21 рычагов 6, 7, 8, 9. Пьезоэлементы 4, 14, 15 подсоеденены к источнику питания, реализующему необходимую последовательность управляющих импульсов.
Описанное устройство работает следующим образом.
Благодаря тому, что рычаги 6, 7, 8, 9 вставлены в направляющие ползуна с натягом, в отсутствие управляющих импульсов, он застопорен от перемещений относительно пьезприводной системы силами трения в точках 18, 19, 20, 21. При подаче напряжения на пьезоэлементы 14, 15 они удлиняются, рычаги 6, 7, 8, 9 проворачиваются в упругих шарнирах 10, 11, 12, 13 и освобождают ползун 1. Для достижения высокой точности и надежной работы устройства величина перемещений рычагов в точках 18, 19, 20, 21 должна быть равна или меньше величины натяга. В этом случае ползун 1 находится в постоянном контакте с рычагами 6, 7, 8, 9. Установка величины натяга производится винтами 16, 17.
При подаче напряжения на пьезоэлемент 4, благодаря наличию упругого элемента 3, рамка 2 удлиняется и обеспечивает механизм линейного перемещения ползуна 1 относительно пьезоприводной системы. Подачей последовательности управляющих импульсов на пьезоэлементы 4, 14, 15 реализуется поступательное перемещение ползуна относительно пьезоприводной системы в виде последовательности шагов.
Благодаря рычажным мультипликаторам свободный ход рычагов 6, 7, 8, 9 в точках 18, 19, 20, 21 в несколько раз превышает относительно малое удлинение пьезоэлементов поперечных перемещений 14, 15, что снижает требования к точности изготовления деталей, повышает надежность работы и упрощает процесс сборки пьезодвигателя.
Пример реализации заявляемого устройства.
Направляющие А ползуна 1 и рычаги мультипликаторов 6, 7, 8, 9 выполнены из закаленной стали и обработаны шлифованием.
Пьезоэлемент 4 для продольных перемещений изготовлен из керамики ЦТС-46 в виде многослойного пьезоэлемента актюатора длиной 45 мм и сечением 6×6 мм. При подаче напряжения 100 В он удлиняется на 35-40 мкм. Пьезоэлементы 14, 15 для поперечных перемещений изготовлены также из керамики ЦТС-46 в виде многослойных пьезоэлементов сечением 6×6 мм и длиной 10 мм. Их удлинение при напряжении 100 В составляет 8 мкм. Рычажные мультипликаторы, взаимодействующие с пьезоэлементами 14, 15, обеспечивают увеличение свободного хода рычагов 6, 7, 8, 9 в точках 18, 19, 20, 21 до 20-25 мкм.
Пьезоприводная система вставляется в направляющие А ползуна 1 с натягом 15 мкм. Этим обеспечивается ее надежная фиксация относительно ползуна 1.
Изготовленный экспериментальный образец пьезодвигателя обеспечивал шаговый режим работы в диапазоне 0-300 Гц со скоростью до 9 мм/с при тяговом усилии 0,3 кг.
Линейный пьезоэлектрический двигатель, содержащий ползун с направляющими, пьезоприводную систему, источник питания, отличающийся тем, что пьезоприводная система состоит из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат пьезоэлемент продольных перемещений, а на концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
www.freepatent.ru
Изобретение относится к электротехнике и может быть использовано в приборах и системах автоматики, приборостроения, робототехники, авиакосмической, автомобильной отрасли. Технический результат состоит в повышении КПД, в уменьшении его габаритных размеров, возможности обратного хода, в увеличении удельной мощности, ресурса и надежности конструкции за счет уравновешенности конструкции и фрикционного режима передачи момента на ведомый элемент. В двигателе, содержащем неподвижный корпус, ведомый элемент в подшипниковых опорах, пьезоэлементы с рычагами (ПР) прямого и обратного хода, источник питания пьезоэлементов дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами. На подвижном корпусе жестко закреплены два ПР прямого хода и два ПР обратного хода ведомого элемента. ПР одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента. Источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода. Один из двух ПР для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель. 3 ил.
Изобретение относится к пьезоэлектрическим двигателям для использования в приборах и системах автоматики, приборостроения, робототехники, аэрокосмической, автомобильной отрасли.
Известны различные типы пьезоэлектрических двигателей для использования в системах автоматики и машиностроительных конструкциях. Например, пьезоэлектрический регулировочный элемент [Pat. US № 6765335 Piezoelectric adjusting element / Wischnewskiy Wladimir], содержащий корпус, в котором размещены ведомый элемент с фрикционным слоем, движущий элемент (рычаг), соединенный с пьезоэлементом. Или пьезоэлектрический двигатель [Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators (Electronic resource)/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168], состоящий из неподвижного корпуса, соединительного вала, пакета пьезоэлементов с рычагом, жесткозакрепленных в неподвижном корпусе. При подаче на пакет пьезоэлементов напряжения пакет пьезоэлементов удлиняется или укорачивается и создает механическое усилие на рычаг, связанный с элементом конструкции. Применяется для натяжения сети вант рефлектора.
Известно также устройство – пьезоэлектрический линейный двигатель [Pat. US № 8466601 Operating method and driving means of a piezolinear drive / Christopher Mock], имеющий группу исполнительных механизмов – пьезоактюаторов-стеков, контактирующих с ротором двигателя. Каждый пьезоактюатор-стек состоит из двух частей, первая часть – пьезоактюатор продольного типа, а вторая часть – пьезоактюатор сдвигового типа. Причем контакт (зажим и сдвиг) с ротором ведется через вторую часть стека и, по крайней мере, два идентичных стека находятся рядом друг с другом для выполнения альтернативного зажима и усовершенствования движения в пошаговом режиме.
Наиболее близким к заявляемому устройству является устройство регулировки с пьезоприводом [patent US № 5424597 Adjusting device with piezo drive / Rainer Gloss, Harry Marth], снабженное двумя пьезоэлементами с рычагами (ПР), которые взаимодействуют с ведомым элементом посредством пружинного элемента (прототип). Передача движения происходит по причине изменения длины пьезоэлементов при подаче на них напряжения. Из-за непрерывного смещения пружинного элемента гарантируется безопасное зацепление с ведомым элементом. Также устройство содержит источник питания пьезоэлементов, генерирующий одинаковые линейные кривые напряжения, которые расположены в шахматном порядке по времени, в результате чего пьезоэлементы с рычагами (ПР) контактируют с ведомым элементом, когда изменяется длина пьезоэлементов, и вызванные напряжения соответствуют требуемому направлению движения регулировки.
Основными недостатками прототипа являются низкий коэффициент полезного действия устройства, невысокая прочность в узлах крепления пьезоэлемента, также возможность заклинивания подвижных частей двигателя. Кроме того, увеличение мощности устройства возможно только за счет увеличения объёма и мощности пьезоэлемента.
Предложена конструкция линейного пьезоэлектрического двигателя, которая исключает перечисленные недостатки прототипа.
Задача решается тем, что двигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами (ПР) прямого и обратного хода ведомого элемента, источник питания пьезоэлементов, в отличие от прототипа, дополнительно оборудован подвижным корпусом. Подвижный корпус коаксиально размещен внутри неподвижного корпуса и соединен с ним упругими элементами, на подвижном корпусе жестко закреплены два ПР прямого хода ведомого элемента и два ПР обратного хода ведомого элемента, ПР одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из ПР для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель,
Каждый пьезоэлемент с рычагом выполнен в виде единого элемента, который жестко крепится на подвижном корпусе с возможностью фрикционного взаимодействия с ведомым элементом линейного пьезоэлектрического двигателя.
Сущность изобретения поясняется рисунками.
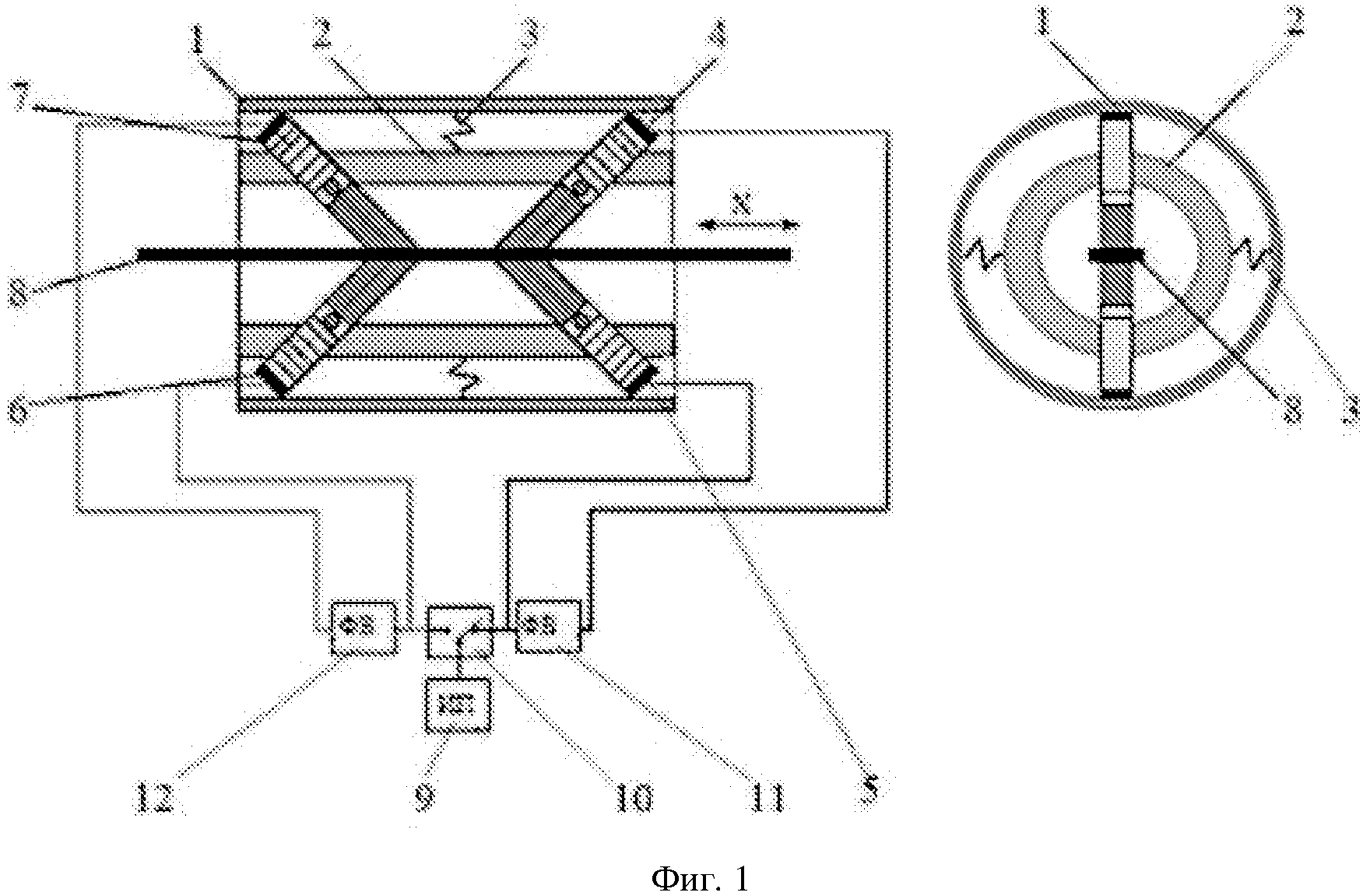
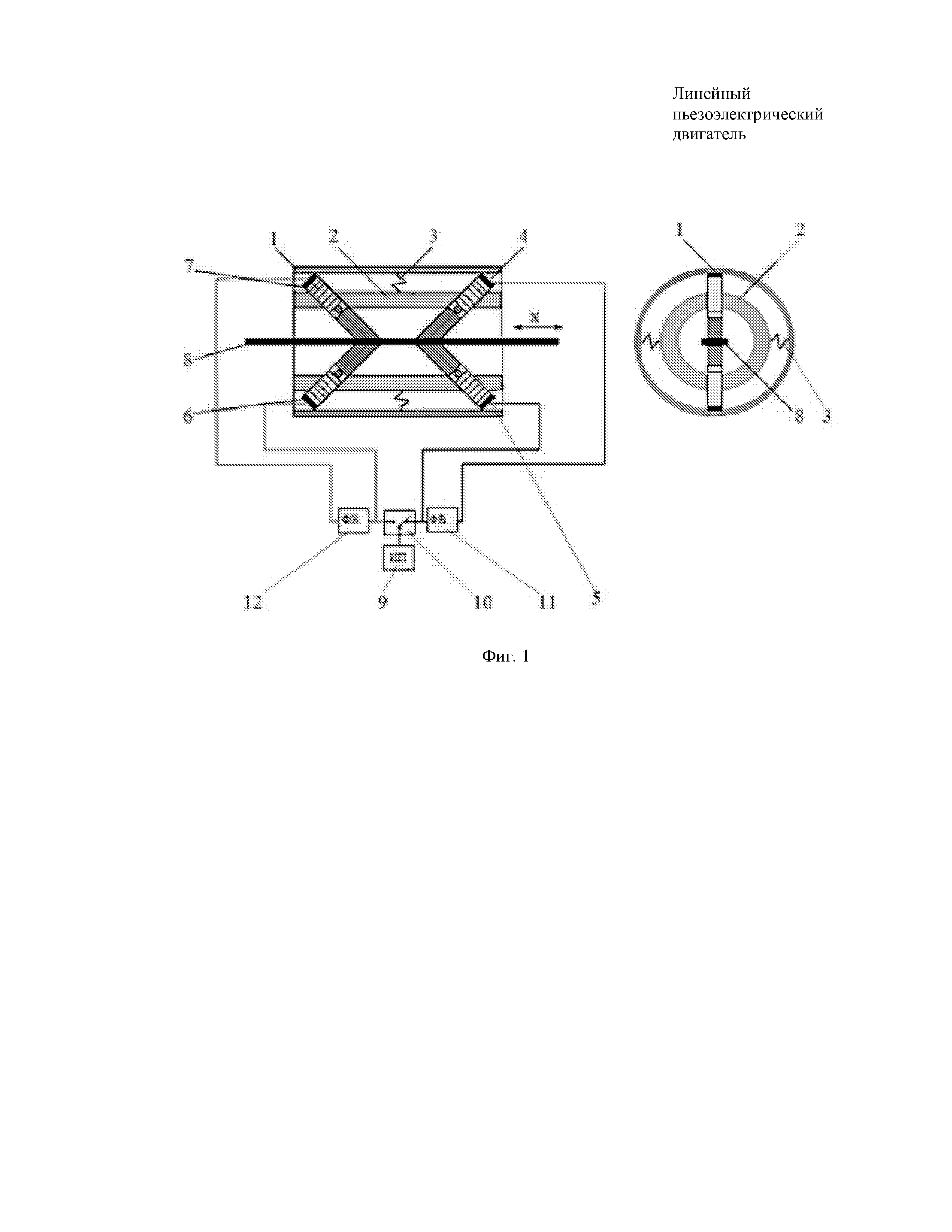
Фиг. 1 – Состав линейного пьезоэлектрического двигателя.
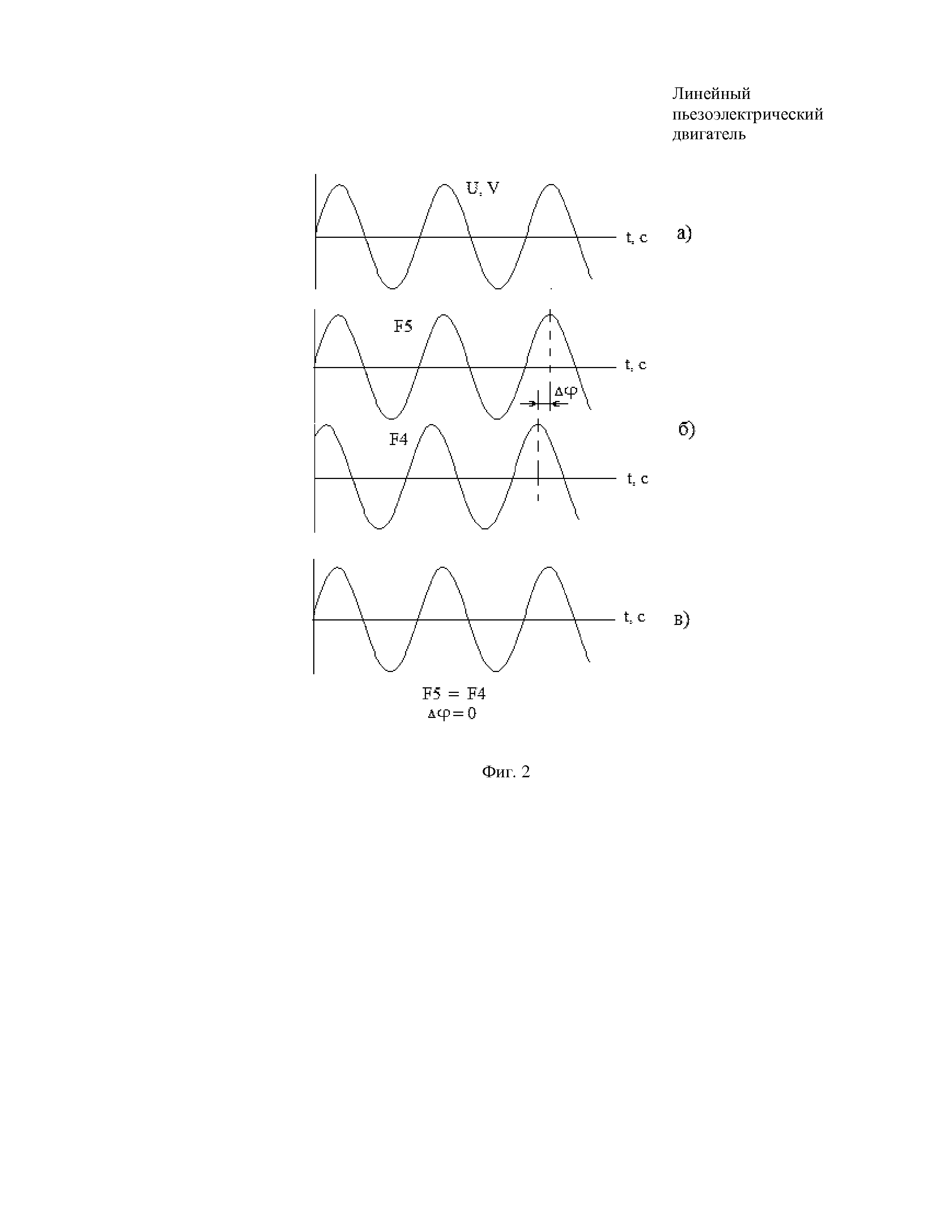
Фиг. 2 – Графики входного напряжения, подаваемого на пьезоэлементы.
Фиг. 3 – Пример практической реализации линейного пьезоэлектрического двигателя.
Линейный пьезоэлектрический двигатель на фиг. 1 содержит два корпуса: внешний неподвижный корпус 1 и внутренний подвижный корпус 2, соединенные между собой упругими элементами 3, на внутреннем подвижном корпусе жестко закреплены ПР 4, 5, 6, 7, из которых два ПР (4 и 5) служат для прямого хода и два ПР (6 и 7) служат для обратного хода ведомого элемента 8. Сам же ведомый элемент 8 размещен в подшипниковых опорах неподвижного корпуса. Подвижный корпус 2 на упругих элементах 3 имеет резонансную частоту колебательной системы, более чем в √2 раз превышающую резонансную частоту колебательной системы подвижного корпуса с ведомым элементом, что позволяет выполнить частотную развязку и исключить заклинивание.
Для синфазной подстройки работы пьезоэлементов с рычагом высокочастотный источник питания 9 через коммутатор 10 подключается к ПР 5 напрямую, а к ПР 4 через фазовращатель 11, при переключении коммутатора для обратного хода источник питания аналогично подключается к ПР 6 напрямую, а к ПР 7 через фазовращатель обратного хода 12.
Для эффективной работы пьезодвигателя необходимо, чтобы усилия F пьезоэлементов (например, 4 и 5) не имели временного сдвига фаз, то есть работали совершенно синфазно (фиг. 2а). Невозможно произвести абсолютно одинаковые пьезоэлементы, поэтому даже при одинаковых сигналах возбуждения реакции ПР 4 и 5 не будут совпадать по фазе (фиг. 2б), что существенно снижает суммарный момент пьезодвигателя. Поэтому на ПР 4 сигнал возбуждения подается через фазовращатель прямого хода 11, на котором компенсируется разность фаз работы ПР 5 и 4 (фиг. 2в).
Линейный пьезоэлектрический двигатель работает следующим образом (фиг.1).
При подключении источника питания 9 через коммутатор 10 к одному ПР 5 напрямую и к другому ПР 4 через фазовращатель 11 (для синфазной подстройки вибросмещения), ПР 4 и 5 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 на упругих элементах 3 перемещается за счет фрикционного трения. При снятии питания с пьезоэлементов с рычагами 4 и 5 механический контакт ПР 4 и 5 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 за счет упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется прямой ход ведомого элемента 8.
Обратный ход пьезоэлектрического двигателя.
При подключении источника питания 9 через переключенный коммутатор 10 к одному ПР 6 напрямую и к другому ПР 7 через фазовращатель 12 (для синфазной подстройки вибросмещения), ПР 6 и 7 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 перемещается на упругих элементах 3 за счет фрикционного трения. При снятии питания с ПР 6 и 7 механический контакт ПР 6 и 7 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 за счет реакции упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется обратный ход ведомого элемента 8 пьезоэлектрического двигателя.
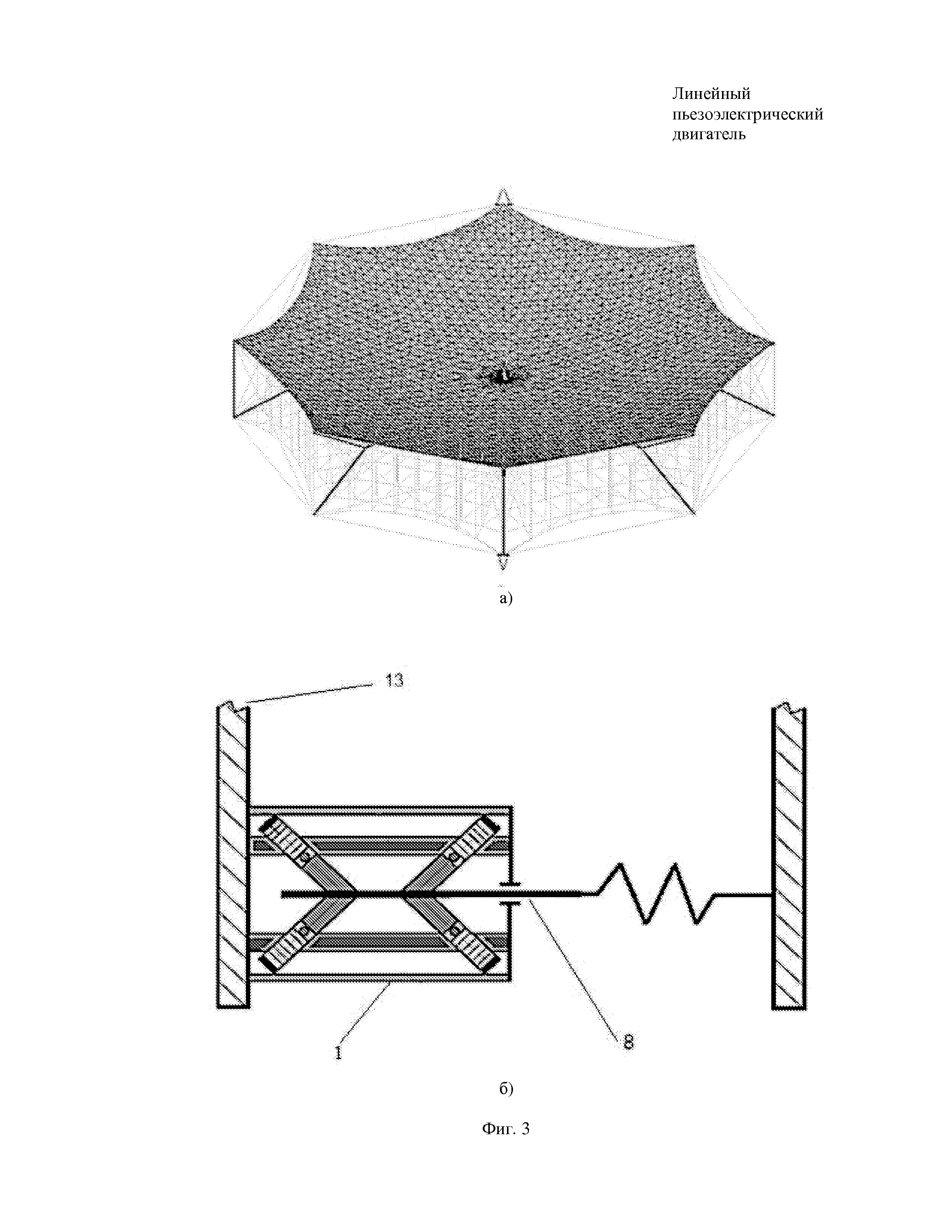
Линейный пьезоэлектрический двигатель заявленной конструкции (например, габариты 50x50x50 мм, масса 100 г, мощность 1 Вт, частота входного напряжения 1 кГц) можно использовать в качестве устройства для натяжения периферийных шнуров УНПШ силового каркаса антенного рефлектора (фиг.3а). Устройство крепится на спице рефлектора 13 (фиг. 3б), шнур рефлектора фиксируется на ведомом элементе 8 пьезоэлектрического двигателя. Таким образом, шнур силового каркаса можно натягивать или ослаблять для улучшения отражающей способности рефлектора.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в повышении коэффициента полезного действия, увеличении удельной мощности пьезодвигателя за счет синфазности вибросмещения, уменьшении его габаритных размеров, обеспечении обратного хода, увеличении ресурса и надежности двигателя за счет фрикционного режима передачи момента на ведомый элемент и синфазной уравновешенности конструкции.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленного устройства.
ЛИТЕРАТУРА
1. Pat. 6765335 United States, Piezoelectric adjusting element / Wischnewskiy Wladimir.
2. Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators [Electronic resource]/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168.
3. Pat. 8466601 United States, Operating method and driving means of a piezolinear drive / Christopher Mock.
4. Pat. 5424597 United States, Adjusting device with piezo drive / Rainer Gloss, Harry Marth.
Линейный пьезоэлектрический двигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами прямого и обратного хода, источник питания пьезоэлементов, отличающийся тем, что дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с рычагами прямого хода ведомого элемента и два пьезоэлемента с рычагами обратного хода ведомого элемента, пьезоэлементы с рычагами одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из пьезоэлементов с рычагами для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель.
www.findpatent.ru
Изобретение относится к пьезоэлектрическим двигателям для использования в приборах и системах автоматики, приборостроения, робототехники, аэрокосмической, автомобильной отрасли.
Известны различные типы пьезоэлектрических двигателей для использования в системах автоматики и машиностроительных конструкциях. Например, пьезоэлектрический регулировочный элемент [Pat. US № 6765335 Piezoelectric adjusting element / Wischnewskiy Wladimir], содержащий корпус, в котором размещены ведомый элемент с фрикционным слоем, движущий элемент (рычаг), соединенный с пьезоэлементом. Или пьезоэлектрический двигатель [Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators (Electronic resource)/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168], состоящий из неподвижного корпуса, соединительного вала, пакета пьезоэлементов с рычагом, жесткозакрепленных в неподвижном корпусе. При подаче на пакет пьезоэлементов напряжения пакет пьезоэлементов удлиняется или укорачивается и создает механическое усилие на рычаг, связанный с элементом конструкции. Применяется для натяжения сети вант рефлектора.
Известно также устройство – пьезоэлектрический линейный двигатель [Pat. US № 8466601 Operating method and driving means of a piezolinear drive / Christopher Mock], имеющий группу исполнительных механизмов – пьезоактюаторов-стеков, контактирующих с ротором двигателя. Каждый пьезоактюатор-стек состоит из двух частей, первая часть – пьезоактюатор продольного типа, а вторая часть – пьезоактюатор сдвигового типа. Причем контакт (зажим и сдвиг) с ротором ведется через вторую часть стека и, по крайней мере, два идентичных стека находятся рядом друг с другом для выполнения альтернативного зажима и усовершенствования движения в пошаговом режиме.
Наиболее близким к заявляемому устройству является устройство регулировки с пьезоприводом [patent US № 5424597 Adjusting device with piezo drive / Rainer Gloss, Harry Marth], снабженное двумя пьезоэлементами с рычагами (ПР), которые взаимодействуют с ведомым элементом посредством пружинного элемента (прототип). Передача движения происходит по причине изменения длины пьезоэлементов при подаче на них напряжения. Из-за непрерывного смещения пружинного элемента гарантируется безопасное зацепление с ведомым элементом. Также устройство содержит источник питания пьезоэлементов, генерирующий одинаковые линейные кривые напряжения, которые расположены в шахматном порядке по времени, в результате чего пьезоэлементы с рычагами (ПР) контактируют с ведомым элементом, когда изменяется длина пьезоэлементов, и вызванные напряжения соответствуют требуемому направлению движения регулировки.
Основными недостатками прототипа являются низкий коэффициент полезного действия устройства, невысокая прочность в узлах крепления пьезоэлемента, также возможность заклинивания подвижных частей двигателя. Кроме того, увеличение мощности устройства возможно только за счет увеличения объёма и мощности пьезоэлемента.
Предложена конструкция линейного пьезоэлектрического двигателя, которая исключает перечисленные недостатки прототипа.
Задача решается тем, что двигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами (ПР) прямого и обратного хода ведомого элемента, источник питания пьезоэлементов, в отличие от прототипа, дополнительно оборудован подвижным корпусом. Подвижный корпус коаксиально размещен внутри неподвижного корпуса и соединен с ним упругими элементами, на подвижном корпусе жестко закреплены два ПР прямого хода ведомого элемента и два ПР обратного хода ведомого элемента, ПР одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из ПР для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель,
Каждый пьезоэлемент с рычагом выполнен в виде единого элемента, который жестко крепится на подвижном корпусе с возможностью фрикционного взаимодействия с ведомым элементом линейного пьезоэлектрического двигателя.
Сущность изобретения поясняется рисунками.
Фиг. 1 – Состав линейного пьезоэлектрического двигателя.
Фиг. 2 – Графики входного напряжения, подаваемого на пьезоэлементы.
Фиг. 3 – Пример практической реализации линейного пьезоэлектрического двигателя.
Линейный пьезоэлектрический двигатель на фиг. 1 содержит два корпуса: внешний неподвижный корпус 1 и внутренний подвижный корпус 2, соединенные между собой упругими элементами 3, на внутреннем подвижном корпусе жестко закреплены ПР 4, 5, 6, 7, из которых два ПР (4 и 5) служат для прямого хода и два ПР (6 и 7) служат для обратного хода ведомого элемента 8. Сам же ведомый элемент 8 размещен в подшипниковых опорах неподвижного корпуса. Подвижный корпус 2 на упругих элементах 3 имеет резонансную частоту колебательной системы, более чем в √2 раз превышающую резонансную частоту колебательной системы подвижного корпуса с ведомым элементом, что позволяет выполнить частотную развязку и исключить заклинивание.
Для синфазной подстройки работы пьезоэлементов с рычагом высокочастотный источник питания 9 через коммутатор 10 подключается к ПР 5 напрямую, а к ПР 4 через фазовращатель 11, при переключении коммутатора для обратного хода источник питания аналогично подключается к ПР 6 напрямую, а к ПР 7 через фазовращатель обратного хода 12.
Для эффективной работы пьезодвигателя необходимо, чтобы усилия F пьезоэлементов (например, 4 и 5) не имели временного сдвига фаз, то есть работали совершенно синфазно (фиг. 2а). Невозможно произвести абсолютно одинаковые пьезоэлементы, поэтому даже при одинаковых сигналах возбуждения реакции ПР 4 и 5 не будут совпадать по фазе (фиг. 2б), что существенно снижает суммарный момент пьезодвигателя. Поэтому на ПР 4 сигнал возбуждения подается через фазовращатель прямого хода 11, на котором компенсируется разность фаз работы ПР 5 и 4 (фиг. 2в).
Линейный пьезоэлектрический двигатель работает следующим образом (фиг.1).
При подключении источника питания 9 через коммутатор 10 к одному ПР 5 напрямую и к другому ПР 4 через фазовращатель 11 (для синфазной подстройки вибросмещения), ПР 4 и 5 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 на упругих элементах 3 перемещается за счет фрикционного трения. При снятии питания с пьезоэлементов с рычагами 4 и 5 механический контакт ПР 4 и 5 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 за счет упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется прямой ход ведомого элемента 8.
Обратный ход пьезоэлектрического двигателя.
При подключении источника питания 9 через переключенный коммутатор 10 к одному ПР 6 напрямую и к другому ПР 7 через фазовращатель 12 (для синфазной подстройки вибросмещения), ПР 6 и 7 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 перемещается на упругих элементах 3 за счет фрикционного трения. При снятии питания с ПР 6 и 7 механический контакт ПР 6 и 7 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 за счет реакции упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется обратный ход ведомого элемента 8 пьезоэлектрического двигателя.
Линейный пьезоэлектрический двигатель заявленной конструкции (например, габариты 50x50x50 мм, масса 100 г, мощность 1 Вт, частота входного напряжения 1 кГц) можно использовать в качестве устройства для натяжения периферийных шнуров УНПШ силового каркаса антенного рефлектора (фиг.3а). Устройство крепится на спице рефлектора 13 (фиг. 3б), шнур рефлектора фиксируется на ведомом элементе 8 пьезоэлектрического двигателя. Таким образом, шнур силового каркаса можно натягивать или ослаблять для улучшения отражающей способности рефлектора.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в повышении коэффициента полезного действия, увеличении удельной мощности пьезодвигателя за счет синфазности вибросмещения, уменьшении его габаритных размеров, обеспечении обратного хода, увеличении ресурса и надежности двигателя за счет фрикционного режима передачи момента на ведомый элемент и синфазной уравновешенности конструкции.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленного устройства.
ЛИТЕРАТУРА
1. Pat. 6765335 United States, Piezoelectric adjusting element / Wischnewskiy Wladimir.
2. Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators [Electronic resource]/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168.
3. Pat. 8466601 United States, Operating method and driving means of a piezolinear drive / Christopher Mock.
4. Pat. 5424597 United States, Adjusting device with piezo drive / Rainer Gloss, Harry Marth.
edrid.ru
www.freepatent.ru
(i tj 752560
ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
И АВТОРСКОМУ СВЙДЕТЕЛЬСТВУ
Союз Советских
Социалистических
Республик (61) Дополнительное к авт. свид-ву (22) Заявлено 03.02.78 (21) 2580095/18-25 с присоединением заявки № (51) М. Кл.
Н 01L 41/08
Н 02М 11/00 по делам изобретений (43) Опубликовано 30.07.80. Бюллетень № 28 (53) УДК 537.228.1 (088.8) и открытий (45) Дата опубликования описания 30.07.80 (72) Авторы изобретения
Е. А. Иванов, В. В. Сильченкова, С. М. Афонин и О. К. Каганова (71) Заявитель
Московский институт электронной техники (54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЪ|Й
ДВИ ГАТЕЛ Ъ
ГосУдаРственный комитет (23) Приоритет
Изобретение относится к области электротехники и автоматики и может быть использовано как исполнительный элемент для прецизионных перемещений в оптикомеханических приборах, в технологическом оборудовании для микроэлектроники, в системах автоматического наведения, в механических сканирующих устройствах.
Известны прецизионные линейные шаговые двигатели, основанные на принципе перехвата и состоящие из двух электромагнитных фиксаторов, соединенных между собой пьезоэлектрическим трубчатым элементом. Перемещение данного устройства происходит в калибре из ковкого железа (1).
Недостаток известных устройств состоит в невысоких быстродействии и плавности перемещений.
Известен пьезоэлектрический линейный шаговый двигатель, содержащий направляющие, центральный пьезопреобразователь с закрепленными перпендикулярно его осп пьезоэлектрическими фиксаторами, к одному из которых прикреплен выходной вал, корпус, блок управления (2).
Недостатками известного устройства являются низкие надежность, быстродействие и плавность перемещения.
Цель изобретения состоит в повышении надежности, быстродействия и плавности перемещения, Поставленная це;;ь достигается тем, что блок управления снабжен дополнительно импульсным высокочастотным источником электрического напряжения, а фиксаторы
5 выполнены в виде составных пьезопреобразователей, включающих пьезоэлектрические стержни, жестко закрепленные между мсмбранами и установленные в стаканах, при этом фиксаторы расположены между мем10 бранами, закрепленными на корпусе, и подключены к импульсному источнику электрического напряжения.
На фиг. 1 изображена конструкция пьезоэлектрического линейного вибрацпонного
15 шагового двигателя в разрезе; на фпг. 2 изображена временная диаграмма работы пьезоэлектрического линейного вибрационного шагового двигателя; на фпг. 3 показана экспериментальная зависимость коэффи20 циснта трения К,р в паре фиксатор — силовая мембрана от частоты возбуждения f пьезопреобразователя фиксатора (усилие прижима 10 кг, длина пьсзопреобразователя 52 мм) .
25 Двигатель содержит центральный составной пьезопреобразователь 1, к которому с двух сторон присоединены фиксаторы 2 п 3, оси которых препендпкулярны оси центрального пьезопреобразователя 1. Фиксатор
30 2 представляет собой составной пьезопреобразователь 4, жестко закрепленный между
752560 стальными мембранами 5 и установленный в выполненном нз титанового сплава стакане 6, который жестко соединен с меморанами 5. Фиксатор 3 представляст собой составной пьезопреобразователь 7, жестко закрепленный между стальными мембранами
8 и установленный в выполненном из титанового сплава стакане 9, который жестко соединен с мембранами 8. Устройство удерживается в исходном состоянии силами статического трения в парах скольжения: фиксатор 2 — стальные силовые мембраны 10, фиксатор 3 — стальные силовые мембраны
11, Устройство включает в себя выполненные из титанового сплава направляющие
12, выходной вал 13, жестко закрепленный к фиксатору 2 соосно с центральным пьезопреобразователем 1. Титановый сплав применяется в качестве основного конструкционного материала, так как имеет близкий к пьезокерамнке температурный коэффициент линейного расширения.
Работа двигателя поясняется на фиг. 2, где U
В исходном состоянии все пьезопреобразователи находятся в нейтральном положении и центральный пьезопреобразователь 1, фиксаторы 2 и 3, выходной вал 13 удерживаются на месте силами статического трения между мембранами 5, 10 и 8, 11.
Пусть необходимо движение в сторону выходного вала 13. Пьезопреобразователь
4 фиксатора 2 возбуждается на частоте параллельного резонанса напряжением U
8 переходит в кинетическое трение (см. фиг. 2) . Одновременно на центральный пьезопреобразователь 1 подается электрическое напряжение U
Затем переменное напряжение снимается с пьезопреобразователя 4 фиксатора 2 н прикладывается к пьезопреобразователю 7 фиксатора 3, Одновременно на пьезопреобразователь 1 подается электрическое напряжение U> противоположной полярности, н он сжимается, подтягивая фиксатор 3, Затем цикл повторяется.
Наиболее эффективное снижение коэффициента трения в паре фиксатор — силовая мембрана при подаче па пьезопреобра5
2д 30
:35
50 зователь фиксатора переменного напряжения ультразвуковой частоты достигается возбуждением пьезопреобразователя на частоте его параллельного резонанса f» (см. фиг. 3). Устройство надежно в эксплуатации, так как износ фиксаторов и силовых мембран в диапазоне десятков микрометров не оказывает существенного влияния на усилие прижима силовой мембраны и на условия работы устройства. Устройство имеет большое быстродействие и плавность перемещения благодаря более быстрому и плавному освобождению фиксаторов, отсутствию в них ударных нагрузок. Устройство технологично, так как требуется меньшая точность изготовления фиксаторов и направляющих.
Испытания показали, что двигатель имеет следующие технические характеристики:
Тяговое усилие до 8 кг.
Величина шага от 0,2 до 20 мкм в зависимости от напряжения, подаваемого на центральный пьезопреобразователь.
Скорость перемещения до 2 мм/сек.
Длина пьезопреобразователя фиксатора
52 мм.
Частота возбуждения пьезопреобразователей фиксаторов около 25 кГц.
Формула изобретения
Пьезоэлектрический линейный шаговый двигатель, содержащий кропус, направляющие, центральный пьезопреобразователь с закрепленными перпендикулярно его оси пьезоэлектрическими фиксаторами, к одному из которых прикреплен выходной вал, блок управления, отличающийся тем, что, с целью повышения надежности, быстродействия и плавности перемещения, блок управления снабжен дополнительно импульсным высокочастотным источником электрического напряжения, а фиксаторы выполнены в виде составных пьезопреобразователей, включающих пьезоэлектрические стержни, жестко закрепленные между мембранами и установленные в стаканах, при этом фиксаторы расположены между мембранами, закрепленными на корпусе, и подключены к импульсному источнику электрического напряжения.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании № 1261523, кл. 1-1 2Л, 1972.
2. Патент СШЛ № 3902084, кл. НΠ— 81, 1975 (прототип).
752560 о,ч а,з
o,а ги ул пр о,г фиг,З
Составитель В. Вавер
Техред А. Камышникова
Редактор Н. Коляда
Корректор P. Беркович
Типография, пр. Сапунова, 2
Заказ 1224/9 Изд. № 405 Тираж 857 Подписное
НПО «Поиск» Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5




www.findpatent.ru
Использование: в качестве исполнительного механизма. Сущность изобретения: пьезоэлектрический линейный шаговый двигатель содержит корпус с закрепленными в нем фиксирующими узлами и подвижную часть. Фиксирующие узлы выполнены из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом. Каждый пьезоблок состоит из сдвигающего пьезоэлемента и фиксирующего пьезоэлемента, разделенных относительно друг друга, корпуса и фрикционного элемента изоляторами. Подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, выполненных разрезными. Промежутки между пьезоблоками заполнены эластичным изоляционным материалом. Технический результат: повышение точности и усилия. 1 з.п. ф-лы, 16 ил.
Изобретение относится к области электрических двигателей, а более точно касается пьезоэлектрических линейных шаговых двигателей, и может быть использовано в качестве исполнительного механизма в электротехнике, телемеханике, радиотехнике и автоматике.
Известен линейный двигатель, содержащий направляющую, корпус и движитель в виде пластин, укрепленных под углом в корпусе и фрикционно взаимодействующих с направляющей (Авторское свидетельство СССР 801149, MKИ H 01 L 41/02). Однако данный линейный двигатель имеет большие габаритные размеры и массу, осуществляет перемещение с помощью упругих пластин, при этом невозможно получение больших усилий и обеспечение точности позиционирования. Известен пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть с рабочим элементом (Авторское свидетельство СССР 720576, МКИ H 01 L 41/04). Однако этот двигатель имеет ряд недостатков: большее количество деталей, сложность конструкции, сложность изготовления фиксирующих узлов и возможность поворота подвижной части в процессе линейного перемещения. Наиболее близким аналогом к заявленному изобретению является пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами, выполненными из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом, и подвижную часть, при этом каждый пьезоблок состоит из сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента (Авторское свидетельство СССР 502426, H 02 N 2/04, 19.04.1976). Однако этот двигатель имеет низкую точность шага и усилия на рабочем элементе двигателя и низкую точность позицирования подвижной части. В основу предлагаемого изобретения была положена задача создания пьезоэлектрического линейного шагового двигателя, конструктивное выполнение которого позволило бы улучшить синхронизацию работы пьезоэлементов при их сдвигах и повысить точность шага и усилие на рабочем элементе двигателя, а также повысить точность позиционирования подвижной части. Это достигается тем, что в пьезоэлектрическом линейном шаговом двигателе, содержащем корпус с закрепленными в нем фиксирующими узлами, выполненными из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом, и подвижную часть, при этом каждый пьезоблок состоит из сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, согласно изобретению сдвигающий элемент и фиксирующий элемент разделены относительно друг друга, корпуса и фрикционного элемента изоляторами, при этом подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, а промежутки между пьезоблоками заполнены эластичным изоляционным материалом. Пьезоэлементы могут быть выполнены в виде пакета из пьезоэлектрических пластин, колец или их секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждой последующей пьезоэлектрической пластины, кольца или сектора направлено в противоположную сторону от предыдущей. Далее изобретение поясняется описанием конкретных примеров его выполнения со ссылкой на прилагаемые чертежи, на которых: фиг. 1 изображает пьезоэлектрический линейный шаговый двигатель (первый вариант), вид спереди; фиг.2 - то же, продольный разрез; фиг.3 - второй вариант исполнения двигателя, вид спереди; фиг.4 - то же, продольный разрез; фиг.5 - третий вариант исполнения двигателя, вид спереди; фиг.6 - то же, продольный разрез; фиг.7 - четвертый вариант исполнения двигателя, вид спереди; фиг.8 - то же, продольный разрез; фиг. 9-16 - такты работы пьезоэлектрического линейного шагового двигателя. Пьезоэлектрический линейный шаговый двигатель содержит цилиндрический корпус 1 (фиг. 1 и 2), в котором расположены два пьезоблока 2 и 3, и подвижную часть в виде цилиндрического стержня. Пьезоблоки 2 и 3 жестко прикреплены к внутренней поверхности цилиндрического корпуса 1. Каждый пьезоблок 2 и 3 соответственно состоит из соединенных между собой сдвигающего пьезоэлемента 5, фиксирующего пьезоэлемента 6, изоляторов 7 и фрикционного элемента 8. Каждый сдвигающий пьезоэлемент 5 имеет вектор начальной поляризации, направленный под углом к продольной оси двигателя. Фиксирующие пьезоэлементы 6 имеют вектор начальной поляризации, направленный перпендикулярно продольной оси двигателя. Изоляторы 7 обеспечивают изоляцию сдвигающего и фиксирующего пьезоэлемента относительно друг друга, а также относительно корпуса 1 и фрикционного элемента 8. Фрикционный элемент 8 выполнен разрезным для обеспечения более плотного обжатия подвижной части 4 пьезоблоками 2 и 3. Каждый пьезоэлемент имеет электроды, к которым подключены провода (эти элементы на чертеже не показаны). Промежутки между пьезоблоками 2 и 3 заполнены эластичным изоляционным материалом 9. На поверхности подвижной части 4 выполнена направляющая 10, которая входит в соответствующую направляющую на фрикционном элементе 8. Направляющая 10 исключает возможность радиального смещения цилиндрического стержня. Возможны другие варианты исполнения пьезоэлектрического линейного шагового двигателя. Во втором варианте (фиг.3 и 4) в отличие от первого пьезоблоки 2 и 3 расположены в одной поперечной плоскости и выполнены в виде секторов. Это снижает массу и габаритные размеры двигателя. Третий вариант (фиг. 5 и 6) отличается от первого формой корпуса, подвижной части и более простой в изготовлении конструкцией пьезоэлементов и пьезоблоков. Корпус 11 имеет форму параллелепипеда, а подвижная часть выполнена в виде стержня 12 прямоугольного поперечного сечения. В четвертом варианте (фиг.7 и 8) корпус 14 имеет вырез 15, через который подвижная часть 16 выходит за пределы корпуса. Конструктивное исполнение пьезоблоков аналогично третьему варианту. Двигатель работает следующим образом. Пьезоблоки 2 (фиг.9) и 3 выполнены из одинаковых сдвигающих пьезоэлементов 5 и фиксирующих пьезоэлементов 6. Работа пьезоблоков 2 и 3 осуществляется при подаче на электроды пьезоэлементов напряжения соответствующей полярности. При подаче на электроды сдвигающих пьезоэлементов 5 положительного напряжения за счет обратного пьезоэффекта происходит сдвиг внутренней части влево относительно внешней части, закрепленной в корпусе 1. При подаче положительного напряжения на фиксирующие пьезоэлементы 6 они зажимают подвижную часть 4, т.к. вектор их поляризации направлен перпендикулярно продольной оси двигателя. При подаче отрицательного напряжения происходит обратное действие: сдвигающие пьезоэлементы 5 сдвигаются вправо, а фиксирующие пьезоэлементы 6 отжимаются от подвижной части 4. Рабочий цикл состоит из шести тактов. Положение, соответствующее первому такту, изображено на фиг. 9. На сдвигающий пьезоэлемент 5 пьезоблока 2 и фиксирующие пьезоэлементы 6 пьезоблоков 2 и 3 подано положительное напряжение, а на сдвигающий пьезоэлемент 5 пьезоблока 3 подано отрицательное напряжение. При этом сдвигающий пьезоэлемент 5 пьезоблока 3 смещен вправо, а сдвигающий пьезоэлемент 5 пьезоблока 2 смещен влево, фиксирующие пьезоэлементы 6 обоих пьезоблоков зажимают через фрикционные элементы 8 подвижную часть 4. Во втором такте (фиг.10) на фиксирующий пьезоэлемент 6 пьезоблока 3 подается отрицательное напряжение, при этом он отжимается от подвижной части 4. В третьем такте (фиг.11) на сдвигающий пьезоэлемент 5 пьезоблока 2 подается отрицательное напряжение и он, смещаясь вправо, перемещает фиксирующий пьезоэлемент 6 и подвижную часть 4 на один шаг. Одновременно на сдвигающий пьезоэлемент 5 пьезоблока 3 подается положительное напряжение и он смещается совместно с фиксирующим пьезоэлементом 6 влево. В четвертом такте (фиг.12) положительное напряжение подается на фиксирующий пьезоэлемент 6 пьезоблока 3, который обжимает подвижную часть 4. В пятом такте (фиг.13) на фиксирующий пьезоэлемент 6 пьезоблока 2 подается отрицательное напряжение и он отжимается от подвижной части 4. В шестом такте (фиг.14) пьезоблоки 2 и 3 расходятся, т.е. на электроды сдвигающего пьезоэлемента 5 пьезоблока 2 подается положительное напряжение и он смещается влево, а на сдвигающий пьезоэлемент 5 пьезоблока 3 подается отрицательное напряжение и он совместно с фиксирующим пьезоэлементом 6 и подвижной частью 4 смещается вправо. Происходит перемещение подвижной части 4 еще на один шаг. На этом рабочий цикл завершается, подвижная часть переместилась на два шага. Далее процесс линейного перемещения продолжается в той же последовательности. Для осуществления реверса необходимо изменить порядок подачи напряжения на фиксирующие пьезоэлементы. Применение нескольких последовательно установленных пьезоблоков позволит значительно увеличить усилие на подвижной части. Предлагаемый пьезоэлектрический линейный шаговый двигатель имеет простую конструкцию и технологию изготовления, небольшие габаритные размеры и массу, большое усилие на подвижной части, а также позволяет повысить точность позиционирования и равномерность линейного перемещения.Формула изобретения
1. Пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами, выполненным из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом, и подвижную часть, при этом каждый пьезоблок состоит из сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, отличающийся тем, что сдвигающий пьезоэлемент и фиксирующий пьезоэлемент разделены друг относительно друга, корпуса и фрикционного элемента изоляторами, при этом подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, а промежутки между пьезоблоками заполнены эластичным изоляционным материалом. 2. Пьезоэлектрический линейный шаговый двигатель по п.1, отличающийся тем, что пьезоэлементы выполнены в виде пакета из пьезоэлектрических пластин, колец или их секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждой последующей пьезоэлектрической пластины, кольца или сектора направлено в противоположную сторону от предыдущей.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7, Рисунок 8, Рисунок 9, Рисунок 10, Рисунок 11, Рисунок 12, Рисунок 13, Рисунок 14, Рисунок 15, Рисунок 16www.findpatent.ru
1-дневный обучающий курс по пьезоактюаторам и электромагнитным линейным актюаторам пройдет в рамках выставки ACTUATOR2018 (Германия, Бремен). Курс проведет компания CEDRAT TECHNOLOGIES 28 июня 2018 года.
подробнее...

Приглашаем присоединиться к крупнейшей встрече профессионалов ФОТОНИКА МИР ЛАЗЕРОВ И ОПТИКИ 2018 в период с 27 февраля по 02 марта 2018. Мы с радостью встретим вас в Павильоне 7 зала 5 на стенде № 75D10, чтобы обсудить ваши проекты и представить вам изделия технологии CEDRAT TECHNOLOGIES (Франция) и NANOMOTION (Израиль) http://www.photonics-expo.ru/
Преднагруженные пьезоактуаторы с интегрированным рычажным усилителем перемещения (Amplified Piezo Actuators – APA) позволяют увеличить допустимую рабочую частоту пьезокерамики при увеличении ее рабочего хода
подробнее...
140 страниц, теперь доступен на русском языке по запросу. В запросе просьба указывать ФИО, название организации и контактный номер телефона.

Компактный контроллер (Compact Controller Board - CCBu20) обеспечивает все параметры для управления 2-х осевыми пьезомеханизмами с датчиками положения, такими как DDT35XS-SG или XY25XS-SG.
подробнее...
На русском языке на пьезосборки здесь
На русском языке на оптоэлектронные компоненты здесь

подробнее...
metrology-spb.ru








