ОПИСАНИЕ
ИЗОБРЕТЕНИЯ
К АВТОРСКОМУ СВИДВТВЛЬСТВУ
Сеоз Советских
Социавистимеских
Республик
653713 (6!) Дополнительное к авт. сзид-ву (22) Заявлено 01.03.77 (21) 2457070/24-07 с присоединением заявки № (23} Приоритет
Опубликовано 25.03.79.бюллетень №11 (51} М. Кл.
Н 02 Р 8/00 йсударетвекай кенатет
СССР аа делам кзевретеккя я еткрнтк» (5З) УДК Â21.313.
1 3-1 33.3-525 (088.8) Дата опубликования описания 28.03.79 (72) Лвторы изобретения
В. К. Баценкин, В. К. Баранов, О. Л. Клюев и В. А. Крючков (7l) Заявитель
{ 54) СПОСОБ КАЛИБРОВКИ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ
Изобретение относится к автоматизированному электроприводу, в частности к дискретному электроприводу с шаговым двигателем, и может быть использовано в прецизионных станках с программным управлением, установках для выращивания монокристаллов, оптико-механических устройствах и т.д.
Известны способы управления шаговым электродвигателем путем подачи на его фазы изменяющихся по определенному закону токов для уменьшения цены шага двигателя. При этом закон изменения фазных токов должен обеспечивать при каждом дискретном изменении фазных токов поворот вала двигателя на один и тот же элементарный шаг Pl).
Если бы двигатель имел строго синусоидальную форму распределения магнитных полей в воздушном зазоре, то в этом случае необходимо сформировать
Я6 ступенчатые синусоидальные (с определенным фаэовым сдвигом) токи в фазах двигателя для обеспечения дробления ос2 новного шага на целое число равных элементарных шагов. У реального двигателя закон распределения магнитных полей в воздушном зазоре отличается от синусоидального, что требует соответствующего изменения формы фазных токов (калибровки шагового электродвигателя) °
Наиболее близким к данному изобретению является способ калибровки шагового электродвигателя путем подачи на
его фазы токов и регистрации положения вала двигателя датчиком ноложення (21, Недостатками известного способа яв ляются большие затраты времени н трудоемкость задания требуемых значений момента нагрузки.
Белью настояшего изобретения asляется повышение производительности труда при проведении процесса калибровки шагового электродвигателя.
Указанная цель достигается тем, что шаговый электродвигатель вводят в режим вращения сначала с монотонно нврастаюшей, а затем с монотонно убывал
653713 щей скоростью путем регулирования угла рассогласования между результирующим вектором токов в фазах и положением ротора и производят запись временных диаграмм фазных токов и положения вала двигателя, по которым определяют зависимость фазных токов от положения вала двигателя.
Описываемый способ поясняется на примере двухфазного шагового электродвигателя с датчиком положения, изменение скорости которого путем регулирования угла рассогласования между результирующим вектором токов в фазах и положением ротора. достигается эа счет включения его в автоматическую релейную систему регулирования скорости.
На чертеже приведена структурная схема системы.
На валу двухфазного шагового электродвигателя 1 установлены датчик скорости 2 и датчик положения 3, подключенный своим выходом к первому входу . сумматора 4.
Выход сумматора связан с входами функциональных преобразователей 5 и 6, выходы которых соединены с входами усилителей мощности 7 и 8. К выходам этих усилителей подключены фазы 9 и
10 двигателя и датчики тока 11 и 12.
Выходы датчиков тока связаны с входами обратной связи по току усилителей мощности и входами регистрирующих приборов.
Выход датчика скорости 2 соединен с одним из входов схемы сравнения 13, на другой вход которой подается сигнал
0И, определяющий требуемый закон изменения скорости двигателя. Выход схемы сравнения 13 соединен со входом релейного элемента 14, выход которого связан со вторым входом сумматора 4.
Выход датчика положения 3 подключен также к регистрирующему прибору.
Калибровка шагового электродвигателя производится следующим образом.
Предположим вначале, что обратная связь цо скорости отключена (на втором входе сумматора 4 сигнал. ф 0). На первый вход сумматора подается сигнал . 9 от датчика положения, с выхода сумматора он поступает на входы функциональных преобразователей 7 и 8. Эти преобразователи образуют на своих выходах сигналы 1„„5ю 9 и I @os & где 9 — угол поворота ротора двигателя.
Под действием этих сигналов возникнут соответствующие токи в фазах 9 и 10
35 двигателя, так как усилители мощности
7 и 8 с токовыми датчиками 11 и 12 представляют собой автоматические системы поддержания заданных значений токов.
Датчик положения должен быть так установлен по отношению к валу двигателя, чтобы при разомкнутой обратной связи по скорости угол рассогласования между результирующим вектором фаэных токов и положением ротора двигателя, то есть между осями магнитных полей статора и-ротора, равнялся нулю (g =О).
В этом случае у двигателя, имеющего синусондально распределенные магнитные поля в воздушном зазоре и для котоpoFD справедливо выражение
M =Iù к (cos8sin(is+s )-siniiccs(isis >)=c
=I „К а1пЧ, / где М gg — электромагнитный момент двигателя; — амплитуда тока в фазе; — коэффициент пропорциональм ности
Из формулы следует, что введение постоянного угла рассогласования при заданной амплитуде фазных токов
1„„в идеализированном случае вызывает появление неизменного движущего момента и электрическая машина работает в режиме бесконтактного двигателя постоянного тока. Задание угла рассогласования между осями магнитных полей статора и ротора путем подачи сигнапа 9 на второй вход сумматора 4 обеспечивается эа счет того, что датчик положения 3 жестко связан с валом двигателя 1 и его сигнал б определяет положение вектора магнитного поля ротора, а положение вектора магнитного поля статора определяется углом = 8 + Ч, поскольку фазы двигателя питаются токами, результирующий вектор которых в механических угловых единицах совпадает с .вектором магнитного поля статора. Сит нал g образуется в результате алгебраического суммирования сигнала 8
/ получаемого от датчика положения, и задаваемого сигнала . Следует отметить, что для обеспечения технической реализации функциональных преобрааоваЯ телей 5 и 6, преобразующих линейно изменяющийся сигнал в синусоиду и косинусоиду соответственно, сигнал 9 от датчика должен изменяться по пилообразному закону в функции угла поло653713 женкя вала двигателя, причем период
"пилы должен совпадать с пространственным периодом магнитного поля статора двигателя.
Периодизация сигнала & которая либо применением соответствующего датчика, либэ его предварительным преобрвзованием при помоши стандартных методов вычислительной техники, позволяет произвести суммирование углов 8 и М перед подачей их на входы функциональных преобразователей 5 и 6. Это возможно благодаря тому, что угол 9 изменяется в ограниченных пределах (меньших пространственногопериода магнитного поля
I статорадвигателя). Такимобразом,приразомкнутой пепи обратной связи по скорости система представляет собой бесконтактный двигатель постоянного тока с питанием фаз синусоидальными токами и возможностью регулирования движущего момента за счет изменения угла рассогласования между векторами магнитных полей статора и ротора.
В идеализированном случае для двигателя с синусоидальным распределением магнитных полей обеспечивается постоянство электромагнитного момента и независимость его от угла поворота ротора & при Ч =CoVl9t
В реальных двигателях наличие высших пространственнх гармоник магнитных . полей приводит к появлению пульсирующих составляющих момента, которые зависят от угла & . В описываемой системе они компенсируются путем изменения угла рассогласования 9, которое, в конечном счете, приведет к отклонению формы токов в фазах двигателя от той, которая имела бы место в идеали40 зированном случае. Изменениеугла У производится прк поддержании .заданного закона изменения скорости у З релейной системы регулирования. При замыкании
43 отрицательной обратной связи по скорости восстанавливается связь между выходом релейного элемента 14 и вторым входом сумматора 4. На выходе релейного элемента появляется сигнал f, который может принимать лишь экстремальные значения + и — 9 (практически выполняется условие /Ч „/61ЦГ электрических радианов).
В релейной системе регулирования скорости токи в фазах двигателя подвергшотся частотной и широтно-импульсиой модуляции. При помощи фильтров ниж» них частот (на чертеже не показаны) производится демодуляция фазных токов которые регистрируются приборами.
Посредством способа калибровки шагового электродвигателя можно зарегистрировать форму фазных токов в функции положения вала при поддержании заданного закона изменения скорости двигателя, например линейного.
Действительно, если двигатель нагружен постоянным моментом Ppgy то задавая постоянную скорость CO COOStaoлучим в установившемся режиме (Мдв)р = М н.
Так как релейная сйстема.-инвариантна к воэмушенкям момента, то при постоянстве момента нагрузки пульсации электромагнитного момента двигателя будут скомпенсированы соответствуюшими изменениями формы фаэных токов.
Однако обеспечение неизменности момента в пределах долей оборота вала двигателя представляет собой сложную техническую задачу. Эту трудность можно преодолеть, если установить на валу двигателя маховик с известным моментом инерции и задать монотонно возрастающий и монотонно убываюший закон изменения скорости, в частном случае линейный закон изменения скорости с постоянным ускорением и замедлением вала двигателя.
При этом
ДВ=- а1 ™ Зим= СОПб
8UU у где I — суммарный момент инерции;
ЯАд,- динамический момент. дин
Таким образом, двигатель будет нагружен неизменным по величине динамическим моментом.
Использование описанного способа калибровки шагового электродвигателя обеспечивает значительное уменьшение времени калибровки к ее упрошение, так как позволяет получить непосредственно зависимость фазных токов от времени или положения вала двигателя.
Формула изобретения
Способ калибровки шагового электро двигателя путем подачи HB его фазы токов и регистрации положения вала двигателя датчиком положения, о т л ичаюшкйся тем,что,сцелью и овыш ения производительности труда, 6537
7 двигатель вводят в режим вращения сначала с монотонно нарастающей, а затем монотонно убывающей скоростью путем регулирования угла рассогласования между результируимпим вектором токов в фазах и положением ротора и производят запись временных диаграмм фазных токов и положения вала двигателя, по которым определяют зависимости фазных токов от положения вала двигателя.
Источники информадии, принятые во внимание при экспертизе
13 8
1. Чиликин М. Г. и др. Совершенствование дискретного электропривода с шаговыми двигателями - М., труды Московского энергетического ин-та, Автоматизированный электропривод промышленных установок, вып. 223, 1975, с. 5.
2. Чиликин М. Г. и др. Электрическое дробление шага - М., труды Московского энергетического института, Электромеханические устройства с цифровым управлением, вып. 202, 1974, с. 10.
Заказ 1305/41
Тираж 856 Подписное
ЦНИИПИ Государственного комитета СССР по делам-.изобретений и открытий
113035, Москва, Ж-35, Раушская наб, д. 4/5
Филиал ППП Патент, r. Ужгород, ул. Проектная, 4
Составитель Горнии
Редактор Д. Мепуришвили Техред Л, Алферова Корректор И. Ковальчук




www.findpatent.ru
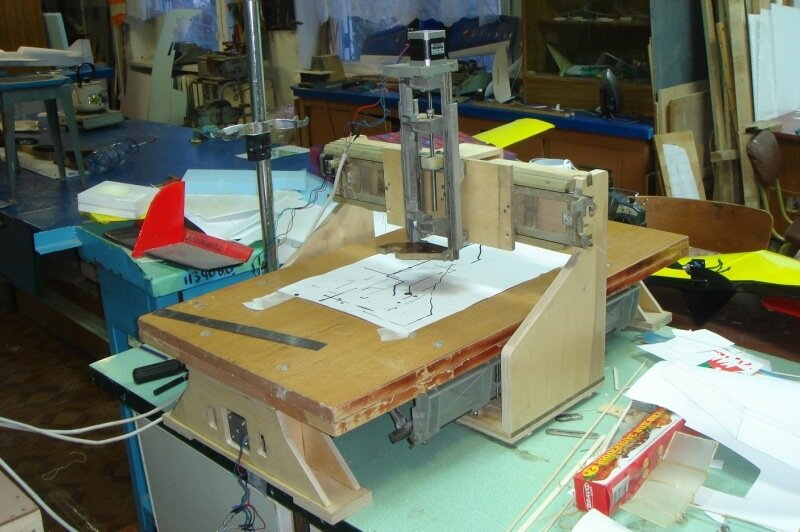
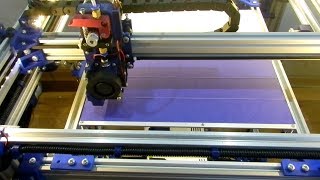
Нет, на пенорезке- нагретая струна и четыре двига ее таскают. Она работала вполне достойно. По крайней мере она выполняла то, что хочу я, а не то, что хочет она.
Фотографии в альбоме «CNC», автор orlov19061976 на Яндекс.Фотках

Насчет сопоставления даташитов- это для меня очень темный лес, я, образно говоря "напильник", а не "паяльник". В электронике вообще не соображаю.
Вчера опять экспериментировал. Частота 25кГц опять поставил демку, на драйвере перемычки стоят в токе 100%. Думал, заикания двигателей из-за слишком большой нагрузки, может не может провернуть вал из-за трения в гайках, несоосности и т.д. Снял двигатель, отключил его от всей механики. Завел. Оказывается, он дергается и вообще без нагрузки, с голым валом.
Дальше сижу, грущу, тихонько бьюсь лбом об монитор. Начал уже просто в произвольном порядке тыкать в настройки. Получил следующий результат- двигатели устойчиво равномерно работают без пропуска шагов только с такими настройками: шагов/мм- 500, скорость- 500, ускорение- 20, крайние правые окошки в "мотор тюнинге" (простите, забыл как называются 15, 15), режим-1/16 шага. При этом усилие на портале вполне достаточное для таскания дремеля по бальзе или фанере. Но при микрошаге и таких настройках перемещение о-о-очень медленное и задав, например перемещение по оси-200 мм, каретка проезжает 18. Далее. Движки ровно крутятся по очереди. Если завести все 3 мотора, то X иY идут плавно, а Z начинает опять дергаться и пропускать шаги. Любые внесения изменений в настройки вызывают дергания и заикания. Для эксперимента повесил на контроллер движок от пятидюймового флоппика, который хвалят многие форумчане- разницы, кроме меньшего крутящего момента не увидел.
Станок вот такой:
Фотографии в альбоме «CNC», автор orlov19061976 на Яндекс.Фотках

[more]

Попробовал подключить драйвер к компьютерному БП, разницы не увидел.
Уважаемые форумчане, без вашей помощи станок не побежу (победу, побежду)...
mir-cnc.ru

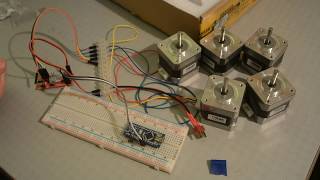
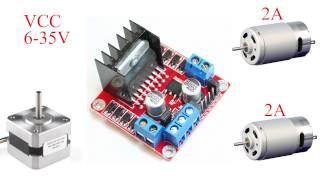
Продолжаю сборку станка ЧПУ. Шаговые двигателя я уже подобрал. Для проверки электроники, собрал тестовое подключение на столе.
Сперва я подключил к CNC shield v3 шаговые двигателя:
Двигателя выбраны сейчас нам нужно настроить рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
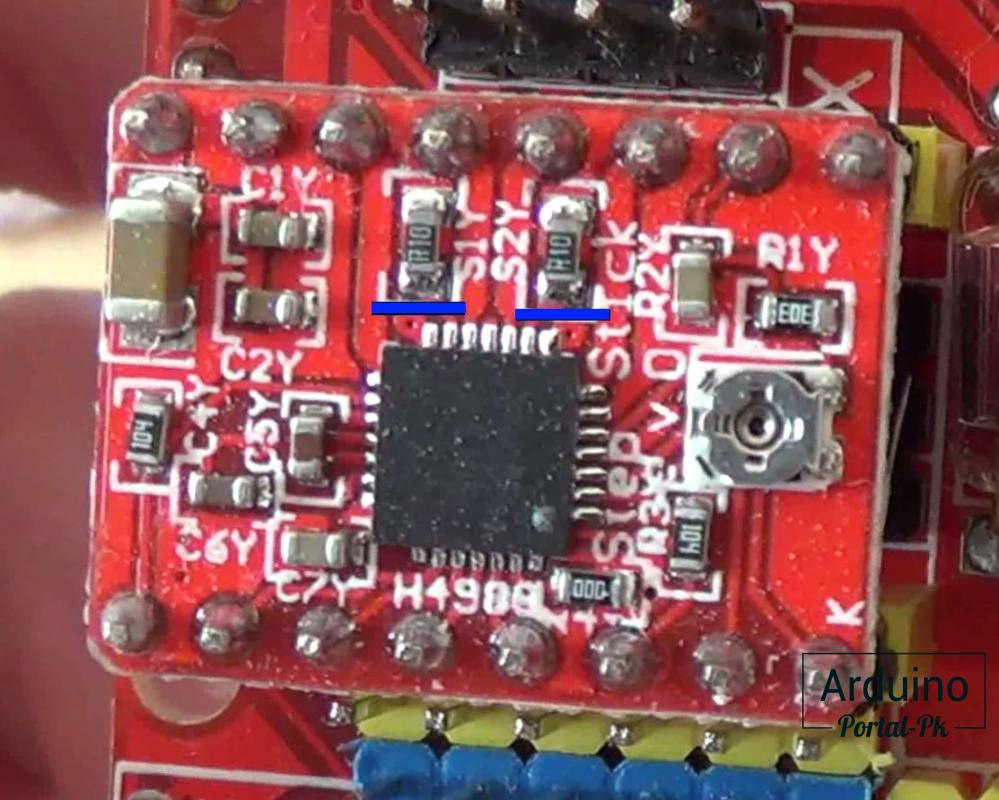
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100. Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Аналогично рассчитываю значения для EM-181
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = 0,96*0,7 = 0 ,672 В.
Так как я не смог найти datasheets для ЕМ-142. Для расчетов предложил, что ток на обмотку данного двигателя составляет 0,6 А. Если двигатель будит издавать гул сильнее обычного значит ток превышает максимальное значение. Его нужно понижать. Так как я взял ток обмотки. При расчете Vref ист. Не нужно умножать на 0,7, как я говорил выше ток одной обмотки составляет 70% от номинального. Расчет будет вот таким:
Vrefист. = 0,6 * 8 * 0,100 = 0,48 В.
По моим ощущениям я угадал с током двигателя ЕМ-142. Останется рассчитать сколько шагов он делает для совершения одного оборота. Об этом расскажу в следующей статье.
В видео подключил кнопки «Пауза», «Продолжить», «Аварийная остановка» . Подключил на пины шпинделя светодиод. И протестировал работу. Так же установил один конечный выключатель. Все работает. Если у вас возникли вопросу что куда подключается к CNC shield v3, читайте статью: Плата расширения для Arduino UNO, CNC shield v3 и драйверов A4988
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
portal-pk.ru
30.09.2016 Сайт https://anteh.ru
Шум и вибрации эффектора снижаются подбором скорости печати, тока X Y Z драйверов, напряжением питания шаговых двигателей, перестановкой драйверов, возможно правильным подбором параметра dropsegments.При установке платы драйвера шагового двигателя в RAMPS 1.4, перед запуском шаговых двигателей, обязательно установить ток драйвера под используемый двигатель, или хотя бы его уменьшить. По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер.В используемом дельта принтере стоит 4ре драйвера, китайские красные A4988 на фото ниже слева:
Они не позволяют установить максимальный паспортный ток шаговых двигателей 3х вертикальных X Y Z осей 1.7A (и это хорошо). Предельный ток для шагового двигателя экструдера(JK42HS40-1204D) 1.2A, для шаговых двигателей X Y Z осей(JK42HS60-1704A) 1.7А. Согласно документации максимальный ток у А4988 2A. Но у используемой платы драйвера A4988 его невозможно установить более 1.5A. Т.е. максимальный ток можно установить только для шагового двигателя экструдера. Связано с использованием вместо 20k резистора 30k в цепи формирования опорного напряжения платы драйвера. Сделано скорее для предотвращения перегрева и повреждения шаговых двигателей. Слишком большой ток может их повредить и в установке максимального тока нет необходимости, особенно для дельта принтера. Для дельта принтера ток устанавливаю на 30% меньше их максимального паспортного значения.
Забегая вперёд, использование дробления шага 1/32 вместо 1/16 не приведёт к увеличению разрешения принтера. Это приведёт к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт к снижению шума, как в режиме удержания, так и режиме хода. Поправить разрешение можно здесь. Всё будет зависеть от индивидуальных особенностей принтера, платы драйвера, шаговых двигателей. Причём оно настолько индивидуально, что при перестановке вроде бы одинаковых плат драйверов шум может уменьшиться или увеличится. Т.е. "шаманство" ещё то. В моём случае использование DRV8825 с дроблением 1/32 привело к существенному увеличению шума при удержании. Слабо уловимый свист А4988(Vref=1.2V=1.5A дробление 1/16) сменился на довольно заметное шипение/шелест DRV8825(Vref=0.85V=1.7A дробление 1/32) и только снижение тока до 0.9A поменяло шипение на еле различимый свист. Причём Y двигатель перестал шипеть при 1.2A, X при 1.1A, Z при 0.9. Перестановка одинаковых X Y Z драйверов меняет картину. В общем двигатель Y шипит/свистит существенно меньше остальных как с DRV8825 так и с А4988. Причём перестановка одинаковых драйверов меняет его шумность. Как видим всё не просто. Получается, для снижения шума нужно подбирать двигатели, драйвера, провода, мощность блока питания, напряжение питания двигателей, например поднять с 12 до 14V.Субъективно показалось, что при 1/32 ход по Z более тихий, но были положения в которых двигатель начинал очень сильно "шелестеть" почти скрипеть и положения, в которых его было не слышно.Фантазии по поводу разрешения. Для увеличения разрешения нужно использовать 0.9градусные двигатели вместо 1.8, с энкодером. Не дёшево и в ряде случаев это ничего, кроме опыта и морального удовлетворения не даст. Использую сопло 0.8мм толщина слоя 0.5мм, планирую на сопло 1.2 переходить. Диаметр стола 400 высота 835. Измеренная микрометром вертикальная погрешность, каждой из X Y Z осей используемого дельта принтера, при смене направления движения каретки 0.11мм. С такой погрешностью нет смысла о разрешении шагового двигателя беспокоиться, но это сравнительно малая погрешность. Используются рельсовые направляющие HIWIN, ремень GT2.
Как оно было:Показалось, что с А4988 принтер работает шумновато, решил попробовать DRV8825. 5шт. можно за 10$ приобрести, сам покупал за 275р. с рук:
Обращайте внимание на правильность ориентации платы драйвера при установке. Смотрите на шелкографию RAMPS 1.4 и нижней стороны платы драйвера, чтобы пины GND VDD и пр. совпадали.У DRV8825 максимальный шаг дробления 1/32 в 2 раза больший, чем у А4988. По умолчанию, джамперами, у А4988, шаг дробления выставлен 1/16. Такое же положение джамперов соответствует дроблению 1/32 у DRV8825. Ко всему нужно подправить прошивку и убедиться, что параметры применились, или в настройках, через меню принтера увеличить параметры в 2 раза control ->motion, смотрим последние 4ре параметра:
Это стандартные значения для 1.8град двигателя, дробление 1/16, ремень GT2 шаг 2мм и количество зубьев на шкиве двигателя =20. Для дробления 1/32 нужно установить Xsteps/mm, Ysteps/mm, Zsteps/mm в 160. Esteps не трогал, для него оставлен А4988.Также можно в исходнике прошивки marlin поменять:#define DEFAULT_AXIS_STEPS_PER_UNIT {80, 80, 80, 155} //{X Y Z E}на:#define DEFAULT_AXIS_STEPS_PER_UNIT {160, 160, 160, 155} //{X Y Z E}При необходимости 4ре коэффициента можно вычислить так:Для дельта принтера первые 3 коэффициента будут одинаковыми -это X Y X одинаковые двигатели.360/1.8 = 200 шагов на оборот. 1.8 -угол шага.(200*16)/(2*20) = 80 = (шагов на оборот * количество микро шагов устанавливается джамперами на RAMPS 1.4) /(приводной ремень GT2 с шагом 2 мм * 20-ти зубчатые шкивы на роторе шаговых двигателей каждой из XYZ осей)Последний коэффициент экструдера рассчитывается так:((200*16) / (d шкива подачи прутка * 3.14))*1.1 = (3200/(7.2мм*3.14))*1.1=~155d шкива подачи прутка -это наименьший его диаметр в центе. Коэффициенты могут быть дробными.
Расчёт опорного напряжения, для выставления предельного тока драйвера делается так:Для A4988:Vrefэкструдер = 1.2А * 8 * 0.1Ом = 0.96VVrefxyz = 1.7А * 8 * 0.1Ом = 1.36VДля DRV8825:Vrefэкструдер = 1.2А * 5 * 0.1Ом = 0.6VVrefxyz = 1.7А * 5 * 0.1Ом = 0.85VЗначения можем уменьшить на 30%.Для установки опорного напряжения используем любой мультиметр и отвёртку с изолированной ручкой. Включаем принтер, щуп минуса мультиметра на GND(земля) платы драйвера, плюс на движок подстроечного резистора -то что отвёрткой будем крутить. Двигатели должны быть отключены. Отвёрткой аккуратно выставляем нужное напряжение. Разные драйвера мешать можно, повторюсь соблюдайте правильную ориентацию установки драйвера, или приобретайте их с запасом.
А теперь эксперимент с попыткой снижения шума двигателей через стабилизацию опорного напряжения:По анализу принципиальных схем: A4988 использует 2 напряжения +5V и +12V питания двигателей. DRV8825 использует только +12V питания двигателей. Vref у A4988 формируется напрямую из +5V, у DRV8825 Vref формируется из +12V питания двигателей через встроенный стабилизатор +3.3V максимальный выходной ток 1ma. Было предположение, что чрезмерный шелест/свист может быть следствием плохой стабилизации Vref.Есть ещё несоответствие маркировки на нижней стороне платы драйверов, у A4988 1B 1A 2A 2B, у DRV8825 2A 1A 1B 2B. Скорее всего ,в первом случае для обозначения канала использовалась цифра, во втором буква. Не обращаем внимания.
На +5 и +12V была добавлена чип керамика 10u и 0.1u. И вместо +3.3V опоры, на подстроечный резистор, через 12k, были заведены +5V. Т.е. реализована схема как у A4988.Ток был выставлен такой же, как и для A4988. Дробление задано такое же 1/16.Результат:С Vref всё было в порядке, субъективно, по показаниям осциллографа встроенные 3.3V лучше, чем внешние +5V. Т.е. предположение о повышенном шуме из-за нестабильности Vref было не верным. Доработка не нужна. Из произведённой доработки смысл есть оставить на +12V конденсаторы 10u и 0.1u.Что касается акустического шума, с DRV8825 он субъективно стал меньше на 1/16. После autohome слышится ощутимый шелест, но при минимальном движении по X или Y наступает тишина, еле различимый свит, субъективно меньше, чем у A4988. Не обошлось без перестановки местами драйверов, шум при удержании снизился.Единственно явное преимущество замены A4988 на DRV8825 -это снижение тепловыделения, можно смело палец на радиаторе держать сколько угодно долго. DRV8825 с током 1.2А. шаг дробления 1/16. Под платой драйвера первый второй джампера сняты, третий установлен. Если использовать шаг дробления 1/32 то тепловыделение будет больше, чем для A4988 c 1/16.
Из всего делаю выводы:0. Со стабильностью Vref=3.3V у DRV8825 никаких проблем.1. Для тестируемого принтера предпочтительно использование DRV8825 с шагом дробления 1/16 и с правильно выставленным током для используемой скорости печати. Снижает шум и в силу особенностей конструкции существенно снижает нагрев драйвера. Можно в цепь +12V на драйвер напаять конденсаторы, чип керамику, например 10u(или более) 25V 1206 и 0.1u 0805, хуже не будет.2. Но если Вы решили собрать принтер сами, безопаснее использовать A4988, в отличие от DRV8825 у неё производитель выставляет безопасный ток 1A, предельный ток 1.5A, который при недосмотре не угробит, ни сам драйвер, ни двигатель. На A4988 можно в цепи питания +5 и +12V на драйвере напаять дополнительную чип керамику.3. Единственное что позволило снизить шипение при удержании -это снижение тока и перестановка драйверов местами, дробление(для используемого принтера) осталось 1/16. DRV8825 субъективно начинал шипеть на большем токе, чем A4988. С DRV8825 печать различимо тише. Можно попробовать купить пачку другую шаговых двигателей и подобрать наименее шумные, вряд ли в этом есть смысл.
Реально и объективно замена A4988 на DRV8825, снизит тепловыделение при дроблении 1/16 и шум при печати. Перестановка драйверов местами может снизить шум/шелест при удержании двигателя. Снижение тока драйверов снижает шум, но нужно следить за отсутствием пропуска шагов. Для дельта принтера можно ставить ток на 30% и более % меньше максимального паспортного тока шагового двигателя, но нужно следить за отсутствием пропуска шагов и отсутствием вибраций эффектор. Использование дробления 1/32 увеличивает тепловыделение драйвера, снижает максимальную скорость печати и не всегда приводит к снижению аккустического шума и резонансных явлений.
Последняя на 15.09.2016 прошивка marlin, меняем параметр DEFAULT_STEPPER_DEACTIVE_TIME с 60 на 600, чтобы двигатели не отключались через 60 секунд при простое:#define DEFAULT_STEPPER_DEACTIVE_TIME 600Команда autohome g28, включаем шаговые двигатели на удержание. Меряем и настраиваем токи XYZ драйверов, как 30% от максимального паспортного значения тока двигателя. По паспорту 1.7A настраиваем 1.2А.Создаём или берём какую-либо длинную модель, растягиваем на весь рабочий стол, скорость печати задаём, например 35мм/сек, формируем G код. Высоту печати настраиваем, чтобы она началась на высоте, например 50мм от поверхности стола, филамент вытаскиваем из экструдера, реальная печать не производится. Через SD карту запускаем на печать. На LCD экране принтера скорость печати 100%, фейдером её можно до 999% довести т.е. увеличить с 35мм/сек до 35*9.99 до 350мм/сек. Смотрим максимальную паспортную скорость принтера, в текущем случае производитель заявляет 300мм/сек. Т.е. при скорости печати 35мм/сек могу произвести аппаратное увеличение скорости печати через меню принтера до 850%.Далее, у нас есть 2 настраиваемых параметра, аппаратная скорость печати от 100%(35мм/сек) до 850%, это 35-300мм/сек и ток X Y Z драйверов. Как обратную связь контролируем пропуск шагов и вибрации эффектора при движении хотэнда по окружности и/или прямой.Проверим пропуски шагов, настраиваем токи X Y Z в 1.2A (для 1.7А двигателей), и плавно увеличиваем скорость печати шагами по 50%. Для DRV8825 ток 1.2А заметные пропуски начинаются на 850%. Проявляются в виде щелчков и опускании плоскости печати по вертикальной оси вниз, во время щелчков экструдер понемногу приближается к столу, причём наблюдается перекос плоскости печати. Ниже 3 демонстрационных видео демонстрирующих пропуски шагов:DRV8825 ток 1.2А скорость 300мм/секDRV8825 ток 1.6A скорость 300мм/секA4988 ток 1.2A скорость 300мм/сек
Реальная комфортная скорость для точной печати у этого принтера 25-40мм/сек, после описанных изменений. Можно печатать до 100мм/cек. Драйвер DRV8825 ток 0.8А, дробление 1/16. Максимальная скорость в районе 200мм/сек, с DRV8825, если выше, то наблюдаются пропуски.Для DRV8825 ток 0.5А, 1/16, пропуски наблюдаются на 300% или 105мм/сек. В управляющем файле задана скорость 35мм/сек.Тестируемый принтер, вопреки маркетинговым заявлением продавца, не будет работать со скоростью печати 300мм/сек, нужно пробовать увеличить напряжение питания шаговых двигателей.Наблюдается некая вилка скоростей печати, при которых эффектор не вибрирует, резонансные явления минимальны. Он вообще не вибрирует, до скоростей 40-60мм/сек, далее начинает немного вибрировать в центральной части стола. Потом вибрации усиливаются и затем на 250мм/сек и более, снижаются. Увеличение напряжения питания шаговых двигателей должно увеличить скорость их работы, и соответственно скорость печати, что весьма актуально, в том числе изменить шумность работыи повлиять на резонансные явления.На скоростях, в районе 300мм/сек и более, для тестируемого принтера, вибрации эффектора слабы. Чем плохи вибрации эффектора или резонанс? Качество печати не проверял, но помимо шума резонанс убивает механику принтера, существенно снижает момент. В любом случае 40-60мм/сек качественной печати это очень хорошо. Резонанс существенно снижает момент двигателя, дробление шага также снижает момент, но если, например при дроблении 1/8 будет наблюдаться резонанс, а при 1/16 его не будет, то можно сказать что при увеличении дробления до 1/16 момент увеличился т.к. исчез резонанс. Паразитный резонанс может снижать момент в большей степени, чем дробление.Пока закончилось так: драйвер DRV8825, ток X Y Z =1.3A, дробление 1/16. Питание шаговых двигателей оставлено прежним +12V. На глаз - увеличение тока драйверов X Y Z приводит к снижению вибраций эффектора. Возможно, ток будет установлен в 0.6A и напряжение питания +24VDC от линейного источника питания. Об этом в других статьях
anteh.ru

...
6 мес. назад
Калибровка шаговых двигателей осей XYZ, двигателя подачи экструдера E0 ---------------------------------------- Поддержка Штан...

...
6 мес. назад
Калибровка драйверов шаговых двигателей.
...
2 г. назад
Всем привет дорогие друзья. Ну вот, как и обещал видео о настройке драйверов. Я думал, что не буду посвящать...

...
1 г. назад
Купить набор http://ali.pub/1ez5hy Купить набор http://ali.pub/1ez4h0 Купить комплект электроники http://ali.pub/1ez4m9 Купить Melzi http://ali....
...
1 г. назад
Калибровка 3D Принтера, настройка прошивки Marlin и прошивка Arduino. Группа ВК: https://vk.com/technical.laboratory Полный список...

...
2 г. назад
Настройка драйвера 3д принтера на примере драйвера MP4988 и шагового двигателя 17HS8401.

...
1 г. назад
Купить 3D принтер DMS DP5 - http://ali.pub/1h38ip Купить 3D принтер Prusa i4 - http://ali.pub/1h38oq Купить 3D принтер - http://ali.pub/1c9xqp Купить...
...
1 г. назад
Экструдер на видео - http://ali.pub/6klz2 Формула 50/x=y*z 50 - сколько миллиметров выдавливаем x - сколько вышло на самом...
...
1 г. назад
Ардуино Nano - http://goo.gl/Y57HRe Провода - http://goo.gl/PQub15 Макетная плата - http://goo.gl/cicFMm Двигатели шаговые 5 шт - https://goo.gl/eLdBQe.
...
2 г. назад
Наша группа: https://www.facebook.com/groups/TevoTarantulaRu/

...
12 мес. назад
Приобрести МД «Пират» можно здесь - http://detektor56.ru/ Скорее всего этим видео не открою Америку, но возможно...

...
1 г. назад
Купить DRV8825 http://ali.pub/tpj1k Купить AD4988 http://ali.pub/2wadx Купить тихие драйвера TMC2100 http://ali.pub/s1rtf ▭▭▭▭▭▭▭▭▭▭▭▭▭▭...

...
1 г. назад
Наша группа: https://www.facebook.com/groups/TevoTarantulaRu/

...
3 г. назад
Контроллер: 1)http://ali.pub/22wiqx 2)http://ali.pub/22wj11 3)http://ali.pub/22wjbx клейкая термопаста: 1)http://ali.pub/1mvx8i 2)http://ali.pub/1mvxkr ...

...
7 мес. назад
В данном видео ролике я расскажу как можно быстро прошить плату ардуино уно прошивкой GRBL, рассчитать и наст...

...
6 мес. назад
В этом видео я протестирую драйверы шаговых двигателей для 3д принтера, на стабильность работы. 3D printer Driver...

...
9 мес. назад
Предисловие.Для новичков в этом деле.Основные моменты настройки и калибровки 3Д принтера для успешного...
...
1 г. назад
3D принтер D (J) bot своими руками ЧАСТЬ 4 (настройка экструдера, пид, ПЕРВАЯ ПЕЧАТЬ) ПРИ НАСТРОЙКЕ ЭКСТРУДЕРА...

...
4 мес. назад
Обзор механики для 3D принтера J-Bot CoreXY с Aliexpress ----------------------------------------------------------------------------------------------------------------...

...
2 г. назад
Такой же 3D принтер со склада в России!: http://ali.ski/W3sDe Ссылка на мою прошивку Repetier Firmware: https://drive.google.com/open?id=0B1qU8HkZll...
sports-video.ru
...
2 г. назад
Всем привет дорогие друзья. Ну вот, как и обещал видео о настройке драйверов. Я думал, что не буду посвящать...
...
1 г. назад
Купить набор http://ali.pub/1ez5hy Купить набор http://ali.pub/1ez4h0 Купить комплект электроники http://ali.pub/1ez4m9 Купить Melzi http://ali....
...
6 мес. назад
Калибровка драйверов шаговых двигателей.
...
8 мес. назад
Как настроить драйвер шагового двигателя Переходите по ссылке в мою группу: https://vk.com/artrezak.
...
1 г. назад
Купить DRV8825 http://ali.pub/tpj1k Купить AD4988 http://ali.pub/2wadx Купить тихие драйвера TMC2100 http://ali.pub/s1rtf ▭▭▭▭▭▭▭▭▭▭▭▭▭▭...

...
2 г. назад
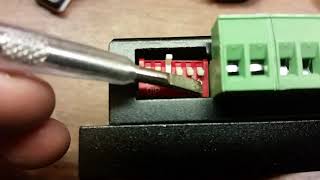
В ролике я постарался наиболее подробно объяснить функции DIP переключателей драйвера шагового двигателя.
...
6 мес. назад
Калибровка шаговых двигателей осей XYZ, двигателя подачи экструдера E0 ---------------------------------------- Поддержка Штан...

...
1 г. назад
Подключил шаговые двигателя с разними характеристиками к CNC shield v3. Установил в микроконтроллер Arduino библио...
...
6 мес. назад
В этом видео я протестирую драйверы шаговых двигателей для 3д принтера, на стабильность работы. 3D printer Driver...

...
5 мес. назад
Драйвер биполярного шагового двигателя с поддержкой микрошагового режима вплоть до 1\16, Обзор и подключени...

...
3 г. назад
Вот как привильно! https://www.youtube.com/watch?v=89BHS9hfSUk&t=9s Читаем аннотации (на телефоне не отображается.) или описание....

...
11 мес. назад
Больше информации по этой теме - http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/
...
2 г. назад
Настройка драйвера 3д принтера на примере драйвера MP4988 и шагового двигателя 17HS8401.
...
7 мес. назад
В данном видео ролике я расскажу как можно быстро прошить плату ардуино уно прошивкой GRBL, рассчитать и наст...

...
3 г. назад
Подробный обзор популярного драйвера шагового двигателя HY-DIV268N-5A (TB6600) Стоит подобный модуль ~14$: http://goo.gl/nsvcxW.

...
8 мес. назад
Все двигатели в не зависимости от способа и технологии их производства отличаются по своим характеристика...

...
2 г. назад
РАЗВЕРНИТЕ ОПИСАНИЕ И НАЙДЕТЕ ВСЕ ПОДРОБНОСТИ И ССЫЛКИ, ТАКЖЕ ЧИТАЙТЕ КОММЕНТАРИИ ПОД ВИДЕО! Все ссылки,...
...
3 г. назад
Контроллер: 1)http://ali.pub/22wiqx 2)http://ali.pub/22wj11 3)http://ali.pub/22wjbx клейкая термопаста: 1)http://ali.pub/1mvx8i 2)http://ali.pub/1mvxkr ...

...
9 мес. назад
ПОЛНЫЙ обзор платы CNC shild Настройка тока шаговых двигателей DRV8825 A4988 TMC2100 Программы подходящие для этой платы...
...
1 г. назад
В этом видео я покажу, как подключит драйвер двигателей постоянного тока L298N =======================================================.

...
2 г. назад
Танцы с бубнами продолжаются.
sports-video.ru
YouTube
Калибровка шаговых двигателей осей XYZ, двигателя подачи экструдера E0 ---------------------------------------- Поддержка Штанов приветствуется) http://donatepay.ru/donation/64249 https://www.paypal.me/EniSykin Спасибо! ---------------------------------------- сопутствующие материалы/

3Д печать Для начинающих. О концевых выключателях в общих чертах. ---------------------------------------- Поддержка Штанов приветствуется) http://donatepay.ru/
YouTube

Что такое шаговый двигатель, как им пользоваться, как устроен шаговый двигатель, как его подобрать, как рассчитать нагрузку на шаговый двигатель, как подключить
YouTube

В этом видео я рассматриваю как работает BLTouch датчик, зачем он нужен и какие проблемы решает. Также в видео вы сможете узнать как установить и подключить его
YouTube

Обзор всех изменений, произведенных мной при доработке "народного" 3D принтера Prusa I3. Суммарно распечатано около 65-ти элементов, не все доработки жизненно н
YouTube

Мотор сделанный из горсти монет и корпуса напечатанного на 3d принтере
YouTube

Сглаживание неровностей в парах растворителя в домашних условиях. После обработки поверхность АБС пластика как у литой детали.
YouTube

Предисловие.Для новичков в этом деле.Основные моменты настройки и калибровки 3Д принтера для успешного ввода в эксплуатацию.
YouTube

Обзор возможностей новой 32-битной материнской платы для 3D принтера от российского производителя. Конфигурация прошивки Repetier под данную плату. Установка на
YouTube

Сборка одного из самых бюджетных экструдеров для 3д принтера, конечно можно ещё дешевле если вы имеете возможность распечатать корпус и механизм на 3д принтере
YouTube

Статья про 3D принтер с кинематикой CoreXY стальной "Канатоходец", ссылка на файлы stl в статье: http://best-chart.ru/cnc-stanki-3d-printery/3d-printer-steel-wi
YouTube

Самые невероятные вещи сделанные на 3д принтере. Дом, машина и даже мост на 3д принтере. Необычное применение 3д принтеров в нашей жизни. ССЫЛКИ: В Китае за
YouTube

http://rusabs.ru/blogs/blog/kak-otkalibrovat-ekstruder-3d-printera Cura15.04.6: https://goo.gl/yhfMhZ ПрошивкаV1.1: http://goo.gl/wl2meq Прошивка V1.0: https://
YouTube

Пробная печать соплом 1 мм PLA пластиком. --------------------------------------------------------------------------------------- Печатаю на заказ. Для размеще
YouTube

Постарался максимально доступно рассказать что такое ретракт и как его едят. Прошу прощения за неточности и оговорки, писал видео очень уставшим. 👱 Наша группа
YouTube

Контроллер: 1)http://ali.pub/22wiqx 2)http://ali.pub/22wj11 3)http://ali.pub/22wjbx клейкая термопаста: 1)http://ali.pub/1mvx8i 2)http://ali.pub/1mvxkr 3)http:
YouTube
vimore.org