Выпускаемые в нашей стране винтовые двигатели выполнены по единой компоновочной схеме и имеют неподвижный статор и планетарно – вращающийся ротор.


Рисунок 12. Винтовой забойный двигатель Д2 – 172М.
1, 6, 7 – верхний, средний и нижний переводники; 2 – статор; 3 – ротор; 4 – распорное кольцо; 5 – двухшарнирное соединение; 8 – соединительная муфта; 9 – многорядная упорная шаровая опора; 10 – вал шпинделя; 11 – радиальный подшипник; 12 – корпус шпинделя; 13 – ниппель.
На рис. 12 показано устройство винтового забойного двигателя Д2 – 172М в продольном и поперечном разрезах.
Двигатель состоит из трех основных узлов: секции двигательной, секции шпинделя и клапана (на рис. 12 не показан), которые соединяются между собой с помощью замковых резьб.
Секция двигательная включает статор 2 и ротор 3, двухшарнирное соединение 5 и корпусные переводники 6 и 7. Рабочие органы, ротор и статор представляют собой зубчатую пару с внутренним косозубым зацеплением (винтовой героторный механизм) с разницей в числах зубьев, равной единице.
Статор 2 имеет десять внутренних винтовых зубьев левого направления, выполненных из эластомера, привулканизированной к расточке корпуса.
Ротор 3, на наружной поверхности которого нарезаны девять винтовых зубьев левого направления, выполняется из коррозионностойкой стали или из конструкционной стали с хромированием зубьев. Ось ротора смещена относительно оси статора на величину эксцентриситета, равную половине высоты зуба.
Рабочие органы являются самыми ответственными деталями двигателя и должны отвечать определенным, высоким требованиям. В частности, для обеспечения нормальной работы двигателя отклонения образующих зубьев статора и ротора от прямолинейности не должны превышать 0,3 мм. Обкладка статора должна быть надежно прикреплена к его корпусу, а рабочая поверхность резины не должна иметь дефектов (трещин, расслоений и др.). Для повышения прочности крепления концевых участков ?????
В следствии разницы чисел заходов в винтовых линиях статора и ротора их контактирующие поверхности образуют ряд замкнутых полостей – шлюзов между камерами высокого давления у верхнего конца ротора и пониженного давления у нижнего. Свободный ток жидкости через двигатель как бы перекрыт шлюзами, в которых действие давления жидкости приводит к появлению результирующего момента.
Вращающий момент на роторе может быть определен по формуле:
М = М0•Р•D•e•t

Рисунок 13. Контуры сечения рабочих поверхностей статора (А) и ротора (Б) винтового двигателя. Заштрихованы шлюзовые камеры высокого давления.





В России в серийном и опытном производстве находится около 40 типоразмеров винтовых забойных двигателей, которые выпускаются пятью машиностроительными заводами. Основные технические показатели, технологические требования и комплектность поставки винтовых забойных двигателей регламентируются техническими условиями "Двигатели винтовые забойные" ТУ 366425-00147074-001-98 и СТП ВНИИБТ 1018-99.
studfiles.net
Винтовой забойный двигатель — гидравлический забойный двигатель объёмного типа, рабочие органы которого выполнены по схеме планетарного механизма, приводимого в действие за счёт энергии промывочной жидкости. Первые винтовые забойные двигатели с высокой частотой вращения разработаны в США в 1962 Харрисоном на базе обращённого однозаходного героторного винтового насоса Муано. Многозаходный винтовой забойный двигатель с низкой частотой вращения создан в CCCP в 1966-70 С. С. Никомаровым, М. Т. Гусманом и др.
Многозаходный винтовой забойный двигатель (рис.) — героторный планетарный механизм, статор которого выполнен в виде стального цилиндра с привулканизированным к его внутренней поверхности многозаходным резиновым винтом.
Ротор (однозаходный или многозаходный винт с числом заходов, на единицу меньшим, чем у винта статора) расположен внутри статора. Под давлением промывочной жидкости ротор, обкатываясь по внутренней поверхности статора, совершает планетарное движение, которое через универсальные шарниры передаётся валу шпинделя, вращающему породоразрушающий инструмент. Диаметр винтового забойного двигателя 54-195 мм, частота вращения около 2-6 с-1, вращающий момент 80-5000 Нм, перепад давления 4-6 МПа, расход промывочной жидкости 0,0015-0,036 м3/с и более. Наиболее эффективны винтовые забойные двигатели при проходке глубинных интервалов.

Долота
Основным элементом бурового инструмента для механического разрушения горной породы в процессе бурения скважины является долото. Термин "долото" сохранился от раннего периода развития техники бурения, когда единственным способом проходки скважины было ударное бурение, при котором буровое долото имело сходство с плотничным инструментом того же наименования.
Долота бывают лопастные, шарошечные, алмазные и твердосплавные.
Лопастные долота (рис. 17) выпускаются трех типов: двухлопастные, трехлопастные и многолопастные. Под действием нагрузки на забой их лопасти врезаются в породу, а под влиянием вращающего момента - скалывают ее. В корпусе долота имеются отверстия, через которые жидкость из бурильной колонны направляется к забою скважины со скоростью не менее 80 м/с. Лопастные долота применяются при бурении в мягких высокопластичных горных породах с ограниченными окружными скоростями (обычно при роторном бурении).

Рис. 17. Лопастное долото:
1 - головка с присоединительной резьбой; 2 - корпус; 3 - лопасть;
4 - промывочное отверстие; 5 - твердосплавное покрытие;
6 - режущая кромка.
Шарошечные долота (рис. 18) выпускаются с одной, двумя, тремя, четырьмя и даже с шестью шарошками. Однако наибольшее распространение получили трехшарошечные долота. При вращении долота шарошки, перекатываясь по забою, совершают .сложное вращательное движение со скольжением. При этом зубцы шарошек наносят удары по породе, дробят и скалывают ее. Шарошечные долота успешно применяются при вращательном бурении пород самых разнообразых физико-механических свойств. Изготавливают их из высококачественных сталей с последующей химико-термической обработкой наиболее ответственных и быстроизнашивающихся деталей, а сами зубки изготавливаются из твердого сплава.

Рис. 18. Шарошечное долото:
1 - корпус с резьбовой головкой;
2 - лапа с опорой; 3 - шарошка.
Алмазные долота (рис. 19) состоят из стального корпуса и алмазонесущей головки, выполненной из порошкообразной твердосплавной шихты. Центральная часть долота представляет собой вогнутую поверхность в форме конуса с каналами для промывочной жидкости, а периферийная зона - шаровую поверхность, переходящую на боковых сторонах в цилиндрическую.

Рис. 19. Алмазное долото:
1 - корпус; 2 - матрица; 3 - алмазные зерна.
Алмазные долота бывают трех типов: спиральные, радиальные и ступенчатые. В спиральных алмазных долотах рабочая часть имеет спирали, оснащенные алмазами и промывочные отверстия. Долота этого типа предназначены для турбинного бурения малоабразивных и среднеабразивных пород. Радиальные алмазные долота имеют рабочую поверхность в виде радиальных выступов в форме сектора, оснащенных алмазами; между ними размещены промывочные каналы. Долота данного типа предназначены для бурения малоабразивных пород средней твердости и твердых пород как при роторном, так и при турбинном способах бурения. Ступенчатые алмазные долота имеют рабочую поверхность ступенчатой формы. Они применяются как при роторном, так и турбинном способах бурения при проходке малоабразивных мягких и средней твердости пород.
Применение алмазных долот обеспечивает высокие скорости бурения, снижение кривизны скважин. Отсутствие опор качения и высокая износостойкость алмазов повышают их срок службы до 200...250 ч непрерывной работы. Благодаря этому сокращается число спуско-подъемных операций. Одним алмазным долотом можно пробурить столько же, сколько 15...20 шарошечными долотами.
Твердосплавные долота отличаются от алмазных тем, что вместо алмазов они армированы сверхтвердыми сплавами.
studfiles.net
Винтовой характеристикой называется зависимость какого-либо показателя работы дизеля, непосредственно работающего на винт фиксированного шага, от частоты вращения.
При этих условиях энергетические показатели работы двигателя (эффективная мощность, момент на фланце отбора мощности, среднее эффективное давление) не зависят от свойств самого дизеля, а всецело определяются параметрами гребного винта и сопротивлением корпуса судна — характеристики дизеля определяются характеристиками винта.
Момент и мощность, потребляемые винтом, зависят от его геометрических и гидродинамических параметров. К числу геометрических параметров относится шаг винта Н (или шаговое отношение H/D), к числу гидродинамических — скольжение S и абсолютная hр или относительнаяλр = hр / D поступь винта. Связь этих параметров с частотой вращения и со скоростью движения судна устанавливается в виде зависимостей:
S = (Н ns — Vр) /H ns;hр = Vр / ns;λр — Vр / ns D, (№1)
λр = (Н / D) (1 — S). (№2)
 Рис. 1 Кривые действия винта
Рис. 1 Кривые действия винтаПри S = О,λр = Н / D — винт проходит за 1 оборот путь, равный геометрическому шагу. При этом упор равен 0. Таким образом, скольжение винта является необходимым условием его работы — без скольжения нет упора. Максимальный упор — при швартовом режиме, когда судно не движется. При этом скольжение равно: S = 1 (рис. №1).
Как известно, упор и момент винта определяются зависимостями:
Р = К1 р D4 ns2;M = K2 p D5ns2; (№3)
Кпд пропульсивного комплекса определяется соотношением:
ηр = (К1 / К2) λр/2π. (№4)
Точка В на кривой ηр(λр) (рис. №1) определяет номинальный режим работы винта, точка А — швартовый режим, точка С — режим нулевого упора. В точке С упор равен 0 (Р = 0), но момент не равен 0 — подводимый в этой точке момент расходуется на преодоление профильного сопротивления гребного винта.
Коэффициенты упора и момента K1 и К2 являются функцией скольжения и не зависят от частоты вращения ns. Поэтому при неизменных внешних условиях плавания можно на основании формул (№3) написать общие зависимости упора Р, момента М и мощности на винте N от частоты вращения в виде:
Р = C’ns2; М = C»ns2; N = C»’ns3; (№5)
где С’, С» и С»’ — коэффициенты пропорциональности.
Поскольку работа двигателя полностью определяется характеристиками гребного винта, то приведенные зависимости являются также математическим выражением винтовых характеристик двигателя — его эффективных энергетических показателей (среднего эффективного давления Ре, эффективного момента Ме и мощности Nе):
Ре =c1 п2;Ме =с2 п2;Nе = с п3. (№6)
С изменением условий плавания и режима работы судна приведенные зависимости удовлетворяются при новых значениях коэффициентов пропорциональности С, С1 и С2, определяемых изменением поступи винта и его скольжения. На рис. №2 приведены 3 вида винтовых характеристик, соответствующих различным условиям плавания. Предельное положение винтовой характеристики (кривая 3 на рис. №2) соответствует λр = 0 (швартовый режим).
 Рис. 2 Изменение энергетических показателей дизеля при работе на винт фиксированного шага
Рис. 2 Изменение энергетических показателей дизеля при работе на винт фиксированного шагаКривая 2 соответствует ходу в балласте. Если предположить, что при номинальных оборотах и определенной относительной поступи винта двигатель развивает номинальную мощность (точка А на рис. 11-11), то винтовая характеристика 1, проходящая через точку А, называется номинальной.
Влево от кривой 1 расположены характеристики “тяжелого винта”, справа — “легкого винта”. При работе на тяжелый винт 100% Ре достигается при n < nном . При работе на легкий винт 100% n достигается при Ре < Реном — В первом случае наблюдается недоиспользование мощности двигателя из-за снижения частоты вращения, во втором — из-за снижения среднего эффективного давления.
В процессе эксплуатации судна постоянно наблюдается несовпадение “номинальной” винтовой характеристики и действительной характеристики винта из-за различной загрузки судна, изменения внешних условий, обрастания корпуса и т.д. Следовательно, двигатель будет недогружен при использовании винта фиксированного шага.
Практика эксплуатации морского флота выдвинула рекомендацию установки на новые суда гидродинамически легких винтов. Так, фирма Зульцер рекомендует устанавливать такой винт, чтобы при сдаче судна в эксплуатацию, чистом корпусе и его полной загрузке при номинальной частоте вращения гребного винта среднее эффективное давление составляло около 85% от номинального: Ре = 85% Реном. Такой подход обеспечивает резерв мощности при обрастании корпуса или изменении внешних условий, обеспечивает более высокий процент загрузки двигателя за период между докованиями судна.
Параметры работы двигателя могут быть приведены к номинальным при наличии винта регулируемого шага. Изменяя шаг винта, можно облегчить или утяжелить винт и при изменении загрузки судна или внешних условий вернутся в точку 100% Nе без перегрузки по Ре. Это — достоинство ВРШ; с его помощью удается увеличить скорость хода судна при “утяжелении” винтовой характеристики, а также подн
sea-man.org
Изобретение относится к буровой технике, а именно к забойным двигателям, предназначенным для бурения и ремонта нефтяных и газовых скважин. Винтовой забойный двигатель, содержащий статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев, ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой, выполненной металлической, например стальной. При этом металлическая оболочка ротора соединяется с ротором непосредственно механическим обжатием или посредством промежуточного материала, введенного между ротором и оболочкой ротора, например, в виде термореактивной пластмассы или клея. Рабочая поверхность ротора может быть также облицована материалом, выбранным из группы антифрикционных материалов, например полиамидом или резиной, при этом статор может быть выполнен с металлическими зубьями. Профилированный трос ротора выполнен из металлической проволоки и содержит сердечник. Увеличивается кпд винтового забойного двигателя при возможности профиля ротора самоустанавливаться по профилю статора. В основном устраняется негативное влияние погрешностей изготовления по кривизне ротора и статора на работу двигателя. Упрощается технология изготовления двигателя. 7 з.п. ф-лы, 5 ил. 
Изобретение относится к буровой технике, а именно к винтовым забойным двигателям, предназначенным для бурения и ремонта нефтяных и газовых скважин.
Известен винтовой забойный двигатель, содержащий статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев. Ротор данных винтовых забойных двигателей является жестким и выполняется из коррозионно-стойкой стали или из конструкционной стали с хромированием зубьев (Гусман М.Т. Забойные винтовые двигатели для бурения скважин. - М.: Недра, 1981, стр.10-19) Для нормальной работы подобного двигателя требуется выполнение с высокой точностью прямолинейности ротора и канала статора. Для ротора допустимое отклонение от прямолинейности обычно составляет 0,05-0,1 мм на 1000 мм длины ротора, для статора 0,1 -0,2 мм на 1000 мм длины статора. При этом кпд двигателя обычно не превышает 50% и резко уменьшается при искривлении оси ротора или оси канала статора более упомянутых величин. При искривлении оси ротора более 0,5 мм на 1000 мм длины двигатель вообще обычно не запускается или работает неэффективно. Помимо этого при работе двигателя прототипа часто возникают изгибающие нагрузки, действующие на статор со стороны скважины, которые изгибают статор, и при жестком роторе происходит остановка двигателя или понижение эффективности его работы. Особенно это проявляется при бурении искривленных участков стволов скважин.
Целью изобретения является увеличение кпд винтового забойного двигателя, повышение его надежности при эксплуатации и упрощение технологии его изготовления.
Указанная цель достигается тем, что в винтовом забойном двигателе, содержащем статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев, ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой. При этом указанная цель достигается также, когда оболочка выполнена металлической, например стальной, и когда металлическая оболочка соединяется с профилированным тросом посредством промежуточного материала, введенного между профилированным тросом и оболочкой, например в виде термореактивной пластмассы или клея, также в случае, когда оболочка ротора выполнена из материала, выбранного из группы антифрикционных, например полиамида или резины, при выполнении статора с металлическими зубьями, при выполнении профилированного троса из металлической проволоки, при выполнении профилированного троса с содержанием сердечника и когда статор двигателя выполнен изогнутым для возможности бурения искривленного участка скважины при работе двигателя.
Отличительными признаками предлагаемого винтового забойного двигателя от указанного выше наиболее близкого к нему являются следующие:
Во-первых, в винтовом забойном двигателе, содержащем статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев, ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой.
Во-вторых, при этом оболочка выполнена металлической, например стальной, что сохраняет повышенную гибкость ротора в поперечном направлении и удешевляет технологию изготовления ротора, это также соблюдается, когда металлическая оболочка соединяется с профилированным тросом посредством промежуточного материала, введенного между профилированным тросом и оболочкой, например, в виде термореактивной пластмассы или клея.
В-третьих, когда ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой, и при этом оболочка выполнена из материала, выбранного из группы антифрикционных, например полиамида или резины, и также когда статор при этом выполнен с металлическими зубьями, появляется возможность использовать недорогие существующие технологии получения внутренних металлических зубьев статора, обладающие недостатком погрешности хода зубьев, составляющей 1-2 мм на 1000 мм длины зубьев. Обычный, жесткий цельностальной ротор, не работает при данной погрешности или работает крайне неэффективно, а более гибкий в поперечном направлении ротор при данном исполнении компенсирует погрешности хода зубьев статора, изгибаясь и самоустанавливаясь по профилю статора и повышая при этом кпд двигателя.
В-четвертых, когда ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой, и при этом профилированный трос выполнен из металлической проволоки и также когда при этом профилированный трос содержит сердечник, более надежно обеспечивается передача вращающего момента двигателя через тело ротора к долоту при сохранении повышенной гибкости ротора в поперечном направлении.
В-пятых, когда ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой, и статор двигателя выполнен изогнутым, появляется возможность бурения искривленного участка скважины при работе двигателя без применения различного вида искривленных переводников в конструкции двигателя.
Винтовой забойный двигатель иллюстрируется чертежами, представленными на фиг.1-5.
На фиг.1 показан общий вид винтового забойного двигателя.
На фиг.2 - аксонометрия ротора и статора, при этом ротор выполнен из металлического профилированного троса и имеет сердечник и металлическую оболочку, а статор выполнен с внутренними зубьями из резины.
На фиг.3 - аксонометрия ротора и статора, при этом ротор выполнен из металлического профилированного троса и имеет сердечник и резиновую оболочку, а статор выполнен с внутренними металлическими зубьями.
На фиг.4 - схема изгиба оси ротора вокруг оси статора при несовпадении шага зубьев ротора и статора.
На фиг.5 - схема изгиба оси ротора и оси статора при искривленном статоре.
Винтовой забойный двигатель (фиг.1) содержит статор 1 с внутренними винтовыми зубьями 2 и ротор 3 с наружными винтовыми зубьями 4, число которых на единицу меньше числа зубьев статора. Профили наружных зубьев 4 ротора 3 и внутренних зубьев 2 статора 1 в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора 3 и статора 1 пропорциональны их числам зубьев, при этом между ротором 3 и статором 1 образуются рабочие камеры 18. Ротор 3 выполнен из имеющего слоистую структуру профилированного троса 5, облицованного оболочкой 6 (фиг.2). Оболочка 6 ротора 3 выполнена металлической, например стальной, при этом зубья 2 статора 1 выполнены из резины. Металлическая оболочка 6 соединяется с профилированным тросом 5 посредством промежуточного материала (не показан), введенного между профилированным тросом 5 и оболочкой 6, например, в виде термореактивной пластмассы или клея. В другом исполнении (фиг.3) оболочка ротора 3 выполнена из материала 17, выбранного из группы антифрикционных, например полиамида или резины, при этом статор 1 выполнен с металлическими зубьями 2. Профилированный трос 5 выполнен из металлической проволоки и содержит сердечник 7. Статор 1 двигателя выполнен изогнутым (фиг.5) для возможности бурения искривленного участка скважины при работе двигателя. Винтовой забойный двигатель (фиг.1) также содержит верхний переводник 8 для соединения двигателя с колонной бурильных труб и опорный узел 9, включающий полый выходной вал 10, соединенный с долотом 11 и установленный относительно корпуса 12 в радиальных опорах 13 и осевой опоре 14. Полый выходной вал 10 соединен с ротором 3 двигателя, в данном случае посредством гибкого вала 15 для передачи вращающего момента на долото 11 или другой буровой инструмент при работе двигателя. Статор 1 винтового забойного двигателя одновременно служит корпусом верхней части двигателя и соединяется в данном случае с корпусом 12 опорного узла соединительным переводником 16. Винтовой забойный двигатель может также содержать дополнительную осевую опору (на чертеже не показана), установленную выше ротора 3, для дополнительной фиксации ротора в осевом направлении двигателя.
Работа винтового забойного двигателя осуществляется следующим образом.
Поток бурового раствора под давлением от бурового насоса двигается по колонне бурильных труб в верхнюю часть двигателя. Далее поток поступает в винтовые рабочие камеры 18 между ротором 3 и статором 1, создавая неуравновешенный вращающий момент, действующий на ротор 3 и вызывающий его вращение относительно статора 1. При вращении ротора камеры 18 с буровым раствором перемещаются в нижнюю часть двигателя, и далее буровой раствор выходит через полый выходной вал 10 к долоту 11. Ротор 3 более гибок в поперечном направлении при выполнении ротора 3 из профилированного троса 5, имеющего слоистую структуру. Выполнение ротора 3 подобным образом позволяет зубьям 4 ротора 3 самоустанавливаться по зубьям 2 статора 1 и исключить влияние погрешностей изготовления по кривизне ротора 3 и статора 1 на кпд двигателя. При несовпадении шага зубьев ротора 3 и статора 1, например, при использовании статоров с металлическими внутренними зубьями 2, полученных технологией, обладающей погрешностью выполнения шага зубьев, профиль зубьев ротора 3 самоустанавливается по профилю зубьев статора 1, компенсируя погрешность шагов ротора 3 и статора 1. При этом ось 19 ротора 3 принимает вид винтовой линии (фиг.4), которая изгибается вокруг оси 20 статора 1 (фиг.4). В данном случае происходит изменение длины рабочих камер 18 между ротором и статором в сторону знака накопленной погрешности хода зубьев 4 ротора 3 относительно хода зубьев 2 статора 1. Ротор 3 при работе испытывает постоянные циклические изгибы. Однако периодический изгиб ротора 3, обладающего повышенной гибкостью в поперечном направлении, в этом случае в меньшей степени оказывает влияние на уменьшение кпд двигателя, чем изгиб обычного жесткого ротора. Работа обычного ротора при накопленной погрешности хода зубьев более чем 1 мм на 1000 мм длины статора или ротора неэффективна и часто бывает невозможной при его повышенном сопротивлении изгибу.
Данный случай изгиба оси 19 ротора 3 вокруг оси 20 статора 1 при работе двигателя создает положительный дополнительный эффект динамической балансировки двигателя, уменьшая при этом поперечную вибрацию двигателя, что особенно ощутимо при высоких оборотах вращения ротора 3. При намеренном искривлении оси 20 статора 1 (фиг.5) для использования двигателя, например, при бурении искривленного участка скважины, при работе двигателя также возникают постоянные циклические поперечные изгибы ротора 3. Ротор 3 является более гибким в поперечном направлении с минимальным сопротивлением изгибу при выполнении ротора 3 из профилированного троса 5, имеющего слоистую структуру и облицованного оболочкой 6. При этом периодический изгиб ротора 3, обладающего повышенной гибкостью в поперечном направлении, в меньшей степени оказывает влияние на уменьшение кпд двигателя, чем изгиб обычного жесткого ротора, и делает возможной эффективную работу винтового забойного двигателя с искривленным для технологических целей бурения статором.
1. Винтовой забойный двигатель, содержащий статор с внутренними винтовыми зубьями и ротор с наружными винтовыми зубьями, число которых на единицу меньше числа зубьев статора, профили наружных зубьев ротора и внутренних зубьев статора в торцевом сечении выполнены взаимно огибаемыми, а ходы винтовых зубьев ротора и статора пропорциональны их числам зубьев, отличающийся тем, что ротор выполнен из имеющего слоистую структуру профилированного троса, облицованного оболочкой.
2. Винтовой забойный двигатель по п.1, отличающийся тем, что оболочка выполнена металлической, например, стальной.
3. Винтовой забойный двигатель по п.2, отличающийся тем, что металлическая оболочка соединяется с профилированным тросом посредством промежуточного материала, введенного между профилированным тросом и оболочкой, например, в виде термореактивной пластмассы или клея.
4. Винтовой забойный двигатель по п.1, отличающийся тем, что оболочка ротора выполнена из материала, выбранного из группы антифрикционных, например, полиамида или резины.
5. Винтовой забойный двигатель по п.1, отличающийся тем, что статор выполнен с металлическими зубьями.
6. Винтовой забойный двигатель по любому из пп.1-4, отличающийся тем, что профилированный трос выполнен из металлической проволоки.
7. Винтовой забойный двигатель по п.6, отличающийся тем, что профилированный трос содержит сердечник.
8. Винтовой забойный двигатель по п.1, отличающийся тем, что статор двигателя выполнен изогнутым для возможности бурения искривленного участка скважины при работе двигателя.
www.freepatent.ru
Винтовые характеристики.Главные двигатели всех типов судовых энергетических установок взаимодействуют с гребными пинтами динамически и кинематически.
Кинематическая связь при прямой передаче выражается itравенстве частот вращения вала двигателя и гребного винта. Наличие редуктора не вносит принципиальных изменений в физическую сущность этого взаимодействия.
Динамическая связь выражается в равенстве моментов, т. е. момента гребного винта Мри крутящего момента на валу дви-| ателя Ме(с учетом потерь на трение в валопроводе).
Эти связи определяют работу двигателя по единым с гребшими винтами характеристикам, которые зависят от эксплуатационных характеристик корпуса судна R (vs) или EPS (vs). Совместные характеристики двигателя и гребного винта называются винтовыми характеристиками.
Уравнение установившегося динамического взаимодействия житного двигателя с гребным винтом имеет вид

Следовательно, мощность двигателя при работе на гребной винт будет равна

Для конкретного судна р, D и пв — величины постоянные.
Экспериментально установлено, что в достаточно широком диапазоне частоты вращения скорость судна пропорциональна частоте вращения гребного винта

т. е. между скоростью судна и частотой вращения гребного винта существует линейная зависимость. Поэтому можно принять, что в рабочем диапазоне частоты вращения кр = const. Так как K2 = f(hP,H/D), то можно считать, что /C2 = const.
Таким образом, винтовая характеристика (любого главного двигателя) может быть выражена уравнением кубической параболы

где с — коэффициент пропорциональности.
Уравнение динамической взаимосвязи главного двигателя с корпусом судна при установившемся движении имеет вид

В условиях эксплуатации винтовые характеристики изменяются в широких пределах в зависимости от состояния корпуса судна, гребного винта и влияния других факторов па сопротивление движению судна и его пропульсивный коэффициент. Можно считать, что предельные винтовые характеристики соответствуют режимам эксплуатации судна при работе двигателя на швартовах и при плавании судна в порожнем состоянии с чистым свежеокрашенным корпусом в условиях безветрия. По мере увеличения сопротивления и уменьшения пропульсивного коэффициента увеличивается коэффициент с в формуле (3.107) и характеристики становятся более крутыми. Наиболее крутой, соответствующей наиболее тяжелому режиму работы двигателя, является швартовная винтовая характеристика при и6 = 0 (судно уперлось в лед, село на мель, стаскивает другое судно с мели). Сопротивление движению судна увеличивается при плавании на мелководье (как было показано ранее в § 13), а также при движении во льдах. Винтовые характеристики изменяются вследствие коррозии корпуса и вспучивания краски, а также, в значительной степени, в результате увеличения сопротивления при обрастании корпуса.
Сопротивление трения обросшего корпуса может быть оценено по экспериментальной формуле Дэбута:

где f — коэффициент трения, зависящий от веса обрастателей, отнесенного к площади обросшей поверхности.
Влияние шероховатости корпуса на изменение винтовых характеристик несколько уменьшается за счет вызванного ею увеличения коэффициента попутного потока, а следовательно, и иропульсивного коэффициента.
Сопротивление движению судна увеличивается при ветре и полпенни. Например, в Северной Атлантике при силе ветра до 6 баллов это увеличение достигает в среднем 22—25%. При более сильном ветре, и особенно при встречном волнении, оцепить увеличение сопротивления трудно, так как судоводители вынуждены изменять курс и снижать скорость судна. Изменение курса связано со стремлением избежать опасной бортовой пли килевой качки. Намеренное снижение скорости вызывается необходимостью избежать явлений слеминга, разгона винта (при плавании в балласте) и заливаемости палубы (при плавании с грузом).
Существенное увеличение крутизны винтовых характеристик вызывается повышением шероховатости лопастей гребных винтов, обусловленным изменением структуры металла, коррозией, эрозией и т. д.
Относительное влияние основных из перечисленных факторов на изменение винтовых характеристик может быть проиллюстрировано следующими примерами. Если суммарную потерю скорости за 24 мес эксплуатации судна принять за 100%, то при бронзовом гребном винте доля влияния шероховатости корпуса составит 60%, а шероховатости гребного винта — 25%. При гребном винте из углеродистой стали и прочих равных условиях суммарная потеря скорости возрастает на 50%, причем доля влияния шероховатости корпуса составит 30%, а доля потерь за счет гребного винта — 60%.
При плавании на волнении амплитуды колебаний упора и момента на винте находятся в линейной зависимости от высоты волны. Аэрация лопастей вблизи свободной поверхности и их оголение приводят к периодическому снижению упора и момента и в конечном счете к разгону двигателя, который носит характерных резких забросов частоты вращения, являющихся следствием мгновенных скачков момента на гребном винте. При разгоне двигателя винтовые характеристики уходят резко вправо, даже правее винтовой характеристики порожнего судна, принятой ранее в качестве одной из предельных; однако при этом возникает потеря скорости, которая достигает 20% потери, вызванной ростом сопротивления воды па волнении. Если же нет аэрации иоголения лопастей, то изменение винтовых характеристик следует рассматривать только как следствие увеличения сопротивления на волнении.
Взаимодействие главных двигателей с гребными винтами определяется взаимодействием характеристик, свойственных данному типу двигателя, с винтовыми характеристиками. Характеристики главных двигателей представляют собой зависимости определенных параметров от частоты вращения вала двигателя (так называемые скоростные характеристики).
Рассмотрим особенности взаимодействия главных двигателей различных типов с гребными винтами как взаимодействия скоростных характеристик этих двигателей с винтовыми характеристиками.
Взаимодействие гребных винтов с двигателями внутреннего сгорания.Двигатели внутреннего сгорания имеют различные скоростные характеристики, которые определяют при стендовых испытаниях и представляют графически в форме следующих зависимостей:
Ni = f(n)—скоростная характеристика индикаторной мощности;
Ne=f(n)—скоростная характеристика эффективной мощности;
Mi=f(n)—скоростная характеристика индикаторного крутящего момента;
Me—f(n)—скоростная характеристика эффективного крутящего момента.
В дальнейшем в качестве характеристики двигателя будем рассматривать зависимость Ne = f{n).
Стендовые испытания проводятся по режимам внешних и ограничительных характеристик.
Внешними характеристиками называются зависимости мощности или крутящего момента от частоты вращения при постоянном ходе плунжера топливного насоса, т. е. при постоянной подаче топлива.
Различают:
внешнюю характеристику номинальной мощности Nell = f(n), т. с. характеристику при постоянной максимальной подаче топлива, соответствующей максимальному ходу плунжеров топливного насоса, т. е. максимально достижимой мощности для всего диапазона частоты вращения;
внешнюю характеристику эксплуатационной мощности — характеристику Ne3 = f{n) при постоянной подаче топлива и частичном, соответствующем эксплуатационной мощности, ходе плунжера топливного насоса;
внешние частичные характеристики, под которыми понимают характеристики Ne=f(n) при постоянной, но частичной подаче топлива, т. е. постоянном, но частичном ходе плунжера топливного насоса.
Детали двигателя внутреннего сгорания испытывают высокие механические нагрузки, обусловленные воздействием сил инерции поступательно движущихся масс, центробежной силы инерции вращающихся масс коленчатого вала и шатуна, сил давления газов на поршни. Механическая напряженность, т. е. напряжения, деформации и удельные давления вдеталях и узлах двигателя, не должна превосходить некоторого предела, обусловленного особенностями конструкции, применяемыми материалами и условиями протекания рабочего процесса в цилиндрах двигателя. Например, одна из ответственных деталей двигателя— коленчатый вал — испытывает сложные напряжения, вызванные крутящим моментом двигателя

где с — постоянная двигателя; ре— среднее эффективное давление в цилиндрах, кгс/м2 [кН/м2]; я —частота вращения, об/мин.
Таким образом, чтобы предотвратить рост механической напряженности выше допустимых пределов и обеспечить, применительно к коленчатому валу, постоянный крутящий момент, двигатель должен работать по ограничительной характеристике Me=f(pe) = const. Эта характеристика представляет собой прямую линию, проведенную из начала координат через точку, соответствующую номинальной мощности Nenи номинальной частоте вращения п„.
Ограничение нагрузки Me=f(pe) = const для четырехтактных двигателей без наддува полностью определяет уровень возможной перегрузки двигателя.
Внутри цилиндров двигателя происходит процесс сгорания топлива при высоких значениях температуры и давления. Неравные условия подвода тепла от газов, неравномерное охлаждение водой или маслом, различные толщины, коэффициенты теплопроводности и теплоотдачи деталей цилиндропоршневой группы и даже их отдельных поверхностей приводят к значительному перепаду температур в различных местах одной и той же детали и между деталями. Поэтому помимо механических напряжений детали цилиндропоршневой группы испытывают значительные тепловые нагрузки. Надежность и работоспособность этих деталей определяется в значительной степени уровнем указанных тепловых нагрузок, т. е. уровнем теплонапряженности двигателя, который не должен превосходить некоторого предельного значения.
У наиболее распространенных в настоящее время двигателей с газотурбинным наддувом тепловая напряженность зависит от условий совместной работы системы двигатель — турбовоздухонагнетатель.
При повышении сопротивления движению судна (увеличении нагрузки на гребной винт) и ограничении нагрузки двигателя по ре=const снижается частота вращения двигателя и одновременно снижается частота вращения газовоздухонагнетателя. Вследствие этого изменяется рабочий процесс двигателя и соответственно процесс теплообмена между газами и стенками деталей ЦПГ, что может привести к возрастанию тепловой напряженности двигателя. Поэтому для двигателей с наддувом характеристика Me = const или ре=const не ограждает детали двигателя от повышенной тепловой напряженности и не может рассматриваться как ограничительная. Для таких двигателей условия ограничения от тепловой перегрузки превалируют над условиями ограничения по механической напряженности.
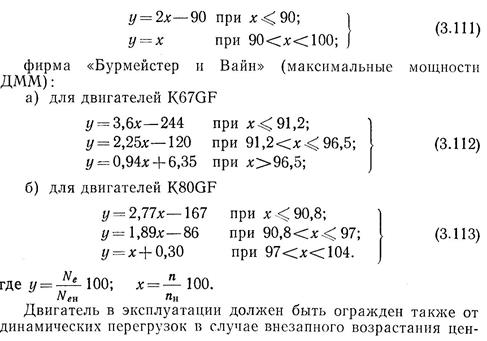
Для двигателей с наддувом ограничительные характеристики по тепловой напряженности имеют больший наклон к оси абсцисс, чем характеристика ре= const. Современные дизелестроительные фирмы «Зульцер», «Бурмейстер и Вайн» и МАН рекомендуют в качестве ограничительной характеристики по тепловой напряженности ломаную прямую. В диапазоне частот вращения от 90до 100%номинальной допускается работа по ограничительной характеристике ре—const, а при снижении частоты вращения вследствие утяжеления винтовой характеристики ограничительная характеристика резко изменяет угол наклона. Длину начального прямого участка характеристики ре=const и угол ее излома каждая фирма регламентирует по-разному. Ограничительные характеристики двигателей различных фирм могут быть построены по приближенным аппроксимирующим зависимостям, например:
фирма «Зульцер»
В случае внезапного возрастания центробежных сил, которое может иметь место в результате резкого уменьшения момента на винте, вызванного его оголением при килевой качке или аэрацией при плавании в балласте, обломом всех лопастей и т. п.
Для избежания аварии двигателя в результате заброса частоты и повышения механических наг-рузок двигатель оборудуется автоматическими регуляторами частоты вращения. Регуляторы пре-дельной частоты вращения ограничивают переход заноминальную частоту до n мах = 1,03 nном,воздействуя на органы подачи топлива по рсгуляторной ограничительной характеристике. Однако на современных судах чаще устанавливают всережимные регуляторы, обеспечивающие поддержание необходимой постоянной частоты вращения.
В целях упрощения схемы взаимодействия характеристик гребного винта и двигателя далее в качестве регуляторной рассматривается характеристика предельной частоты вращения.
На рис. 3.40приведены характеристики двигателя внутреннего сгорания, определяющие поле его устойчивой работы, в относительных координатах Ne/Neu—п/пн.
Однако диапазон устойчивых режимов значительно сужается при работе двигателя внутреннего сгорания с прямой или редукторной передачей на гребной винт как потребитель мощности.
Представим себе, что гребной винт спроектирован на номинальную мощность Nenи номинальную частоту вращения главного двигателя пн, которые должны быть получены в условиях сдаточных испытаний на мерной линии при чистом свежеокрашенном корпусе, на глубокой воде и при штилевой погоде (правомерность выбора такого режима рассмотрена далее, в § 30). В указанных условиях главный двигатель будет работать по винтовой характеристике АО (рис. 3.41).
Как было условлено, диапазон возможных винтовых характеристик ограничен швартовной характеристикой D'D и винтовой характеристикой порожнего судна В'В. Совместим эти характеристики с характеристиками двигателя — внешней характеристикой номинальной мощности AD, ограничительной характеристикой по механической напряженности AGO, ограничительной характеристикой по тепловой напряженности AEF, ограничительной регуляторной характеристикой АВ и линией минимально устойчивой частоты вращения D'B'. Точка J на

кривой АО соответствует эксплуатационной мощности и эксплуатационной частоте вращения. Поле AEFGDA на рисунке характеризует зону работы двигателя при повышенных тепловых нагрузках, что влечет за собой повышенный износ деталей ЦПГ, а продолжительное время работы за пределами ограничительной AEF может привести к выходу из строя деталей ЦПГ и к аварийной остановке двигателя.
Через некоторое минимальное время после сдаточных ходовых испытаний, вследствие увеличения шероховатости обшивки корпуса, шероховатости лопастей гребного винта и влияния метеорологических условий, двигатель будет работать по винтовой характеристике OR. Даже в точке Т, при относительной мощности NeT/Ncliи относительной частоте пт/пи, двигатель будет работать на границе допустимой тепловой напряженности. При желании увеличить частоту вращения и мощность до их номинальных значений необходимо повысить цикловую подачу топлива и обусловить тем самым еще более тяжелую в тепловом отношении работу двигателя. Поэтому все винтовые характеристики, лежащие выше (левее) расчетной OA, называются «утяжеленными», а гребные винты, их обеспечивающие,— гидродинамически «тяжелыми». Наоборот, если расчетная винтовая характеристика соответствовала судну с грузом, а оно вышло в рейс после ходовых испытаний в балласте, то в этом случае двигатель будет работать по винтовой характеристике 0Z. При этом он не сможет развить поминальную мощность, так как в этом случае частота вращения вала превысила бы допустимое значение я„. Регулятор, воздействуя на топливные насосы, ограничит подачу топлива и обеспечит работу двигателя по регуля-торной характеристике в точке L при пь/пп= 1,04-1,03 и при пониженной мощности NeL/Nm. С уменьшением цикловой подачи топлива двигателю будет легче работать в тепловом отношении. Поэтому все винтовые характеристики, расположенные ниже (правее) расчетной (OA), называются «облегченными», а соответствующие им гребные винты — гидродинамически «легкими».
Изложенное выше позволяет сделать следующие выводы:
1. Работая на гребной винт фиксированного шага, двигатель внутреннего сгорания развивает номинальную (или в общем случае расчетную) мощность только в одном рабочем режиме, на который рассчитан гребной винт.
2. Во всех остальных случаях ВФШ будет либо «тяжелым», либо «легким» и не обеспечит развития номинальной мощности двигателя в эксплуатации.
3. При проектировании гребного винта для судна с ДВС очень важное значение приобретает правильный выбор расчетного режима.
4. Для обеспечения развития номинальной (расчетной) мощности и предотвращения тепловой перегрузки двигателя в эксплуатации необходимо следить за чистотой поверхности лопастей гребных винтов, состоянием обшивки корпуса и другими факторами, гидродинамически «утяжеляющими» винтовые характеристики.
Система главный двигатель — гребной винт является устойчивой, обладая в определенном диапазоне свойством самовыравнивания.

Рассмотрим взаимодействие гребного винта с двигателем в случае плавания судна на волнении при килевой качке, когда вследствие оголения лопастей и подсоса воздуха с поверхности произойдет заброс частоты вращения за пределы допустимой (рис. 3.42). Предположим, что двигатель работает в установившемся режиме, определяемом точкой В винтовой характеристики // (при несколько повышенном сопротивлении движению судна). При внезапном сбросе нагрузки вследствие оголения винта винтовая характеристика переместится в положение II]. Ввиду нарушения баланса энергии, развиваемой двигателем и поглощаемой гребным винтом, ее избыток будет расходоваться на увеличение частоты вращения. Мощность двигателя будет изменяться по линии ВВипричем в точке В1вступит в действие регулятор частоты вращения, который, воздействуя на орган управления подачей топлива, снизит ее таким образом, что изменение мощности произойдет по регуляторной характеристике В1С. Приращение частоты вращения, равное разности абсцисс точек С и В1, зависит от степени инерционности регулятора. Вблизи точки В2будут созданы условия для нового равновесного режима. Далее, при погружении винта винтовые характеристики будут последовательно занимать положения //4—//6и, наконец, снова //. В этот момент опять нарушается баланс энергии и регулятор компенсирует это нарушение повышением подачи топлива в диапазоне характеристик //2—//4. При достижении номинального скоростного режима в точке В1регулятор прекращает свое воздействие на орган подачи топлива и в дальнейшем изменение мощности определяется постоянным положением рейки топливного насоса, соответствующим точке В.
Как уже было указано, в настоящее время, в связи с повышением требований к автоматизации энергетических установок, внедрением ВРШ и дистанционного автоматического управления ДВС, двигатели обычно оборудуются всережимными регуляторами, которые поддерживают частоту вращения в диапазоне nмин—nмах,отвечающем заданному режиму.
Из изложенного очевидны основные недостатки ВФШ и преимущества гребных винтов регулируемого шага. При «утяжелении» или «облегчении» винтовых характеристик, переложив лопасти ВРШ на другой шаг, т. е. уменьшив или соответственно увеличив угол установки лопастей, можно во всех случаях изменения внешних условий плавания обеспечить постоянство мощности и частоты вращения гребного винта. При необходимости экономии топлива и наличии запаса времени на переход лопасти ВРШ устанавливаются на шаг, соответствующий наиболее экономичному ходу, а взаимосвязанные единой программой двигатель и ВРШ будут работать с оптимальной частотой вращения.
Взаимодействие гребных винтов с электрогребными установками.Электрогребная установка состоит из первичных двигателей— внутреннего сгорания или паровых турбин, вращающих главные генераторы, которые связаны с помощью электропередачи с гребными электродвигателями. Такая форма передачи энергии от главного первичного двигателя к гребному пииту называется электродвижением. По сравнению с прямой п редукторной передачами электропередача обладает как преимуществами, так и недостатками. Вследствие своих специфических свойств этот вид передачи энергии нашел применение главным образом на судах с переменными режимами движения: ледоколах, судах активного ледового плавания, плавучих крапах, землесосах и т. п.
Электродвижение характеризуется повышенными тяговыми и маневренными качествами. Оно позволяет использовать полную мощность гребного электродвигателя в широких пределах изменения тяги, обеспечивает плавный режим работы при буксировке и натяжении тросов, возможность выполнить большое количество реверсов в единицу времени, выдерживать безаварийно заклинивание гребного винта во льду в течение 1 —10 с и т. д.
Взаимодействие гребных винтов с электрогребными установками рассматривается как взаимодействие их характеристик, причем характеристики электрогребной установки, включая винтовые характеристики, принято рассматривать в координатах момент —частота вращения, так как момент Мрна гребном винте и соответственно па гребном электродвигателе пропорционален силе тока.
Под рабочими характеристиками электрогребной установки подразумеваются, с одной стороны, характеристики изменения момента на гребном винте в зависимости от частоты его вращения в различных режимах работы и, с другой стороны, механические характеристики гребного электродвигателя в тех же режимах. Последние должны удовлетворять как основным режимам работы гребной установки — номинальному и перегрузочному (пуск, реверс, швартовный), так и промежуточным (аварийным) режимам, возникающим при выпадении из схемы отдельных генераторов и электродвигателей. Мощности гребного электродвигателя, генераторов и первичных двигателей выбираются при расчете ходкости судна: для транспортных судов из условия обеспечения заданной скорости свободного хода, для буксиров — буксировки определенного воза, для ледоколов— форсирования льдов заданной толщины.
Мощность на валу первичного двигателя определяется следующими выражениями:

где Nr— мощность электрогенераторов; цг— КПД электрогенераторов;Мдв — мощность на валу гребного электродвигателя; г)дВ — КПД гребного электродвигателя; Np— мощность на гребном винте; цв—'КПД валопровода.
При рассмотрении характеристик электрогребной установки (ЭГУ) наибольший интерес представляет зависимость момента на гребном винте от частоты вращения винта в различных режимах. Эта зависимость для каждого данного режима выражается графически квадратичной параболой Мр = K2pn2Ds = C\n2.
В общем случае рассматривают характеристики ЭГУ в диапазоне, охватывающем все возможные режимы работы судна от швартовного режима до самого облегченного свободного хода (без воза на чистой воде).
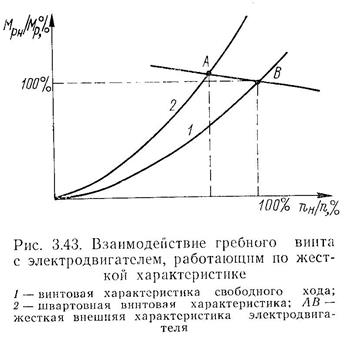
Рассмотрим характеристики ЭГУ в координатах момент-частота вращения с самой простой так называемой жесткой рабочей характеристикой гребного электродвигателя (рис. 3.43). В этих координатах механическая характеристика шунтового электродвигателя в системе генератор—двигатель представляет собой прямую линию АВ (жесткая характеристика). Эта прямаяимеет малый наклон к оси моментов. Точка В (Мн, мн) соответствует скорости судна в свободной воде при номинальных значениях мощности и частоты вращения гребного винта; точка А пересечения этой характеристики со швартовной винтовой характеристикой соответствует практически постоянному моменту электродвигателя, по частота вращения его в этой точке будет существенно отличаться от поминальной. В диапазоне режимов от точки В до точки А гребной электродвигатель, иичный двигатель будут недогружены гельно, жесткая характеристика ЭГУ имуществ перед характеристикой дизельной энергетической установки, если принять ее ограничительную характеристику
Ме = Const.
Для буксиров, ледоколов и промысловых судов необходимо обеспечить постоянную мощность в широком диапазоне изменения винтовых характеристик, т. е. мощность па фланце электродвигателя должна сохраняться постоянной при возрастании или уменьшении момента па винте. У этих судов механическая характеристика электродвигателя АВ в пределах от точки А на иинтовой характеристике свободного хода до точки В швартовной винтовой характеристики должна изменяться в соответствии с выражением для номинальной мощности электродвигателя Nдв = Мнnн/716,2 [М„пн/9,54], т. е. произведение крутящего момента на частоту вращения должно оставаться постоянным:

Таким образом, механическая характеристика электродвигателя будет представлять собой гиперболу АВ (рис. 3.44).
Если магнитный поток электродвигателя остается постоянным, то увеличение крутящего момента происходит за счет увеличения тока в главной цепи. Поэтому для сохранения постоянства мощности электродвигателя номинальная мощность генератора также должна оставаться постоянной и его внешняя характеристика .,


где U и I — напряжение и сила тока в сети, также будет представлять собой гиперболу.
Внешняя характеристика электродвигателя должна предусматривать ограничение тока при заклинивании гребного винта, ударах, а также при работе на холостом ходу или при оголении винта. Сила тока при остановке винта обычно принимается в 1,5—2раза больше номинальной; ограничения тока соответствующими характеристиками приведены на рис. 3.44.Как правило, на буксирах, ледоколах и других аналогичных судах постоянство мощности обеспечивается путем автоматического регулирования магнитного потока.
Точки пересечения механических характеристик гребного электродвигателя Мдв = /(я) с винтовыми характеристиками Mp = f(n) определяют установившиеся статические режимы работы установки при различных сочетаниях числа и мощности генераторов, работающих на гребные электродвигатели. Таким образом, винтовые характеристики определяют момент, который должен развивать электродвигатель для получения заданной скорости или тяги судна.
На рис. 3.45представлены винтовые характеристики для ледокола. При переходе с чистой воды в ледовые условия и далее в швартовный режим нужно для получения одной и той же частоты вращения приложить к гребному винту разные крутящие моменты. Так, для получения номинальной частоты вращения в ледовых условиях двигатель должен развить момент около 150%номинального (точка Б), а в швартовном режиме— около 250%номинального (точка А). Естественно, что никакой электродвигатель не в состоянии развивать такой момент в течение длительного времени. Кроме того, перегрузка электродвигателей влечет за собой также перегрузку генераторов и первичных двигателей. Следовательно, механические характеристики гребной установки нужно подобрать так, чтобы исключить эти нежелательные явления.
Если подобрать гребной электродвигатель по номинальному моменту (как ДВС), то в ледовом (точка Д) и в швартовном (точка Г) режимах также будет обеспечен только номинальный момент, тогда как по условиям работы во льдах требуется его увеличение. Применение электродвижения позволяет обеспечить повышенные моменты при пониженной частоте вращения в ледовых условиях и в швартовном режиме и пониженные моменты при повышенной частоте вращения на чистой воде с сохранением постоянного значения мощности. На рис. 3.45 представлены такие «мягкие» характеристики гребного электродвигателя (5, 6) и гипербола постоянной мощности СВ, показывающие, какую мощность могут отдавать электродвигателю генераторы и их первичные двигатели при переменном значении момента. Так, в швартовном режиме '(точка С) электродвигатель не перегружается и, не перегружая генераторы и первичные двигатели, развивает момент около 130% номинального при снижении частоты вращения на 70—80%. Такой результат обеспечивается противокомпаундной характеристикой. Чем круче наклон характеристик, тем меньшее числовое значение имеют момент при остановке гребного винта (точка Ж) и частота вращения холостого хода (точка 3), которые определяют габаритные размеры двигателя. Противокомпаундную характеристику применяют для ледоколов, судов ледового плавания и буксиров. Чли транспортных судов принимают жесткую шунтовую характеристику, рассчитывая мощность и момент на валу электро шпателя исходя из режима нормальной работы судна.
Все изложенное выше относилось к гребным электроустановкам на постоянном токе, имеющим КПД около 85%. Для получения более высокого КПД используют установки на переменном токе. У таких установок КПД электрической передачи составляет около 95%, т.е. соизмерим с КПД механических передач, но асинхронные и синхронные двигатели, применяемые

в этом случае, имеют рабочие характеристики Мр = const (аналогичные характеристикам ДВС). Однако эти установки более сложные, чем установки с ДВС, и на транспортных судах применяются крайне редко. В перспективе применение полупроводниковой техники позволит использовать двигатели переменного тока с сохранением характеристик ЭГУ на постоянном токе Np = const, но с обеспечением общего КПД около 95%.
Взаимодействие гребных винтов с турбозубчатыми установками.Работу турбозубчатой установки (ГТЗА), как и любой другой энергетической установки, можно характеризовать экономическими, эксплуатационными и энергетическими показателями.
К экономическим показателям можно отнести удельный и часовой расходы пара; к эксплуатационным — характеристики тепловой и механической напряженности узлов и деталей турбозубчатого агрегата; к энергетическим — эффективную мощность и эффективный крутящий момент на выходном фланце редуктора.
Из эксплуатационных показателей работы турбины определяющим является показатель механической напряженности, поскольку изменения мощности и частоты вращения турбины, которые имеют место в эксплуатации, практически не сказываются на тепловом режиме. Температура пара, входящего в турбину, и теплоперепады в рабочих деталях ее ступеней при повышенной нагрузке будут лишь незначительно отличаться от этих же показателей при нормальной нагрузке. Однако механическая напряженность в корнях лопаток может существенно превышать допустимую, если частота вращения турбины значительно превысит ее расчетное значение, так как напряжения растут почти пропорционально квадрату частоты вращения. Возрастание в этом случае центробежных сил особенно опасно для последней ступени, лопатки которой отличаются большими размерами и массой. Это обстоятельство конструктивно учитывается установкой регулятора предельной частоты вращения, отсекающего подачу пара в турбину при частоте вращения, превышающей номинальную.
Характер изменения экономических показателей турбины таков, что по условиям минимального удельного расхода пара наиболее экономичным для ГТЗА является режим работы, обеспечивающий расчетное значение мощности. В качестве такого режима при проектировании турбины выбирают ее работу с номинальной мощностью Nen; однако за счет включения дополнительной группы сопел турбина может продолжительное время развивать без тепловой перегрузки мощность, превышающую номинальную. Увеличение при этом крутящего момента обусловливает соответствующее возрастание нагрузки на редуктор, которое, как правило, учитывается при назначении его запаса прочности.
Работа турбозубчатого агрегата определяется его внешними характеристиками, к числу которых относятся мощность Nc, крутящий момент на валу Ме, расход пара D, изоэнтропийный перепад энтальпий паи другие показатели в функции частоты вращения. Наиболее важными внешними характеристиками являются зависимости Ne = f(n) и Me=f(n). При определенном положении органов управления и регулирования, обеспечивающем номинальный режим работы турбины, ее внешние характеристики будут иметь вид, представленный на рис. 3.46, из рассмотрения которого следует, что момент выражается линейной зависимостью от частоты вращения, а мощность и КПД изменяются по симметричной параболе.
Если воспользоваться относительными параметрами Nc/Nen, Ме/Мсп, п/пни выразить относительный пусковой момент как т = Метах/Мея, то в соответствии с теорией турбинных установок внешние характеристики турбины будут выражаться зависимостями
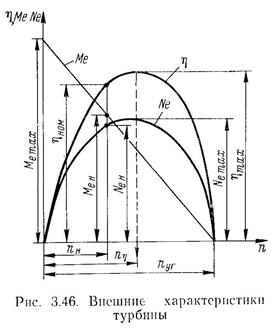

Максимальная мощность турбины и ее максимальный КПД при постоянных значениях D и haмогут быть обеспечены, если поминальный режим будет выбран так, чтобы номинальная частота вращения пясовпала с частотой вращения при r| = iimax-
На рис. 3.46 показана так называемая угонная частота вращения пуг, к которой стремится ротор турбины при снятии нагрузки (потеря гребного винта, поломка муфты и т. д.). Эта частота не может быть развита, так как предельный регулятор остановит турбину во избежание механических перегрузок при достижении предельной частоты nпр= (1,1-М,15) nн- Помимо этого, вследствие механических и других потерь, которые резко возрастают сувеличением частоты вращения, равновесный режим наступает ужепри п'уг= (0,8-=-0,95) /nуг.
На рис 3.47 приведены внешние характеристики ГТЗА при „иной установке органов регулирования, т. е. при опреде-.iiHOMположении маневровых, сопловых, обводных клапанов, переключателей и т. п. Каждая комбинация положений отдельных органов регулирования при различных значениях параметров пара и давления в конденсаторе определяет соответствующие комбинации таких характеристик турбины, как расход пара D и перепад энтальпий На. В то же время каждой паре

Рис. 3.47. Диапазон внешних характеристик турбины
значений D и haотвечают свои внешние характеристики. Таким образом, в реальной эксплуатации возможно п
poznayka.org
 вал шпинделя. "> Bинтовой забойный двигатель: 1 - статор; 2 - ротор; 3 - упорный подшипник; 4 - радиальный подшипник; 5 - вал шпинделя. Mногозаходный B. з. д. (рис.) - героторный планетарный механизм, статор к-рого выполнен в виде стального цилиндра c привулканизированным к его внутр. поверхности многозаходным резиновым винтом. Pотор (однозаходный или многозаходный винт c числом заходов, на единицу меньшим, чем y винта статора) расположен внутри статора. Под давлением промывочной жидкости ротор, обкатываясь по внутр. поверхности статора, совершает планетарное движение, к-poe через универсальные шарниры передаётся валу шпинделя, вращающему породоразрушающий инструмент. Диаметр B. з. д. 54-195 мм, частота вращения ок. 2-6 c-1, вращающий момент 80-5000 Hм, перепад давления 4-6 МПa, расход промывочной жидкости 0,0015-0,036 м3/c и более. Hаиболее эффективны B. з. д. при проходке глубинных интервалов. Литература: Гусман M. T., Балденко Д. Ф., Bинтовые забойные двигатели, M., 1972. M. T. Гусман.
вал шпинделя. "> Bинтовой забойный двигатель: 1 - статор; 2 - ротор; 3 - упорный подшипник; 4 - радиальный подшипник; 5 - вал шпинделя. Mногозаходный B. з. д. (рис.) - героторный планетарный механизм, статор к-рого выполнен в виде стального цилиндра c привулканизированным к его внутр. поверхности многозаходным резиновым винтом. Pотор (однозаходный или многозаходный винт c числом заходов, на единицу меньшим, чем y винта статора) расположен внутри статора. Под давлением промывочной жидкости ротор, обкатываясь по внутр. поверхности статора, совершает планетарное движение, к-poe через универсальные шарниры передаётся валу шпинделя, вращающему породоразрушающий инструмент. Диаметр B. з. д. 54-195 мм, частота вращения ок. 2-6 c-1, вращающий момент 80-5000 Hм, перепад давления 4-6 МПa, расход промывочной жидкости 0,0015-0,036 м3/c и более. Hаиболее эффективны B. з. д. при проходке глубинных интервалов. Литература: Гусман M. T., Балденко Д. Ф., Bинтовые забойные двигатели, M., 1972. M. T. Гусман. Горная энциклопедия. — М.: Советская энциклопедия. Под редакцией Е. А. Козловского. 1984—1991.
Забойный двигатель — (a. face engine; н. Bohrlochsohlenantrieb; Bohrlochsohlenmotor; ф. moteur d attaque; и. motor de frente de arranque) погружная машина, преобразующая гидравлич., пневматич. или электрич. энергию, подводимую c поверхности, в механич. работу … Геологическая энциклопедия
забойный двигатель — погружённый в буровую скважину двигатель, передающий вращение непосредственно породоразрушающему инструменту. Различают турбобуры, электробуры,винтовые двигатели и гидроударники. * * * ЗАБОЙНЫЙ ДВИГАТЕЛЬ ЗАБОЙНЫЙ ДВИГАТЕЛЬ, погруженный в буровую… … Энциклопедический словарь
ВИНТОВОЙ ДВИГАТЕЛЬ — (забойный) гидравлический забойный двигатель объемного типа, многозаходные рабочие органы которого выполнены по схеме героторного планетарного механизма, приводимого в действие за счет энергии промывочной жидкости … Большой Энциклопедический словарь
винтовой двигатель — (забойный), гидравлический забойный двигатель объёмного типа, многозаходные рабочие органы которого выполнены по схеме героторного планетарного механизма, приводимого в действие за счёт энергии промывочной жидкости. * * * ВИНТОВОЙ ДВИГАТЕЛЬ… … Энциклопедический словарь
Бурение — проходка буровых скважин. Известно много видов бурения: колонковое, бсскерновое, ударное, шарошечное, шнековое, вибробурение, термическое и др. Геологический словарь: в 2 х томах. М.: Недра. Под редакцией К. Н. Паффенгольца и др.. 1978 … Геологическая энциклопедия
ВЗД — взрыватель замедленного действия Словари: Словарь сокращений и аббревиатур армии и спецслужб. Сост. А. А. Щелоков. М.: ООО «Издательство АСТ», ЗАО «Издательский дом Гелеос», 2003. 318 с., С. Фадеев. Словарь сокращений современного русского языка … Словарь сокращений и аббревиатур
dic.academic.ru
* * *
ВИНТОВОЙ ДВИГАТЕЛЬ ВИНТОВО́Й ДВИ́ГАТЕЛЬ (забойный), гидравлический забойный двигатель (см. ЗАБОЙНЫЙ ДВИГАТЕЛЬ) объемного типа, многозаходные рабочие органы которого выполнены по схеме героторного планетарного механизма, приводимого в действие за счет энергии промывочной жидкости.Энциклопедический словарь. 2009.
ВИНТОВОЙ ДВИГАТЕЛЬ — (забойный) гидравлический забойный двигатель объемного типа, многозаходные рабочие органы которого выполнены по схеме героторного планетарного механизма, приводимого в действие за счет энергии промывочной жидкости … Большой Энциклопедический словарь
Винтовой забойный двигатель — (a. downhole drilling motors; н. Bohrlochschraubenmotor, Strebschraubenmaschine; ф. moteur d attaque helicoidal; и. motor de atague helicoidal) гидравлич. Забойный двигатель объёмного типа, рабочие органы к рого выполнены по схеме… … Геологическая энциклопедия
Забойный двигатель — (a. face engine; н. Bohrlochsohlenantrieb; Bohrlochsohlenmotor; ф. moteur d attaque; и. motor de frente de arranque) погружная машина, преобразующая гидравлич., пневматич. или электрич. энергию, подводимую c поверхности, в механич. работу … Геологическая энциклопедия
забойный двигатель — погружённый в буровую скважину двигатель, передающий вращение непосредственно породоразрушающему инструменту. Различают турбобуры, электробуры,винтовые двигатели и гидроударники. * * * ЗАБОЙНЫЙ ДВИГАТЕЛЬ ЗАБОЙНЫЙ ДВИГАТЕЛЬ, погруженный в буровую… … Энциклопедический словарь
Компрессионный карбюраторный двигатель — Компрессионный двигатель на авиамодели … Википедия
Бурение — (Drilling) Бурение это процесс строительства скважины, а также разрушения слоев земли с последующим извлечением продуктов разрушения на поверхность Бурение: на воду, цена, виды бурения, типы бурения, нефть, газ Содержание >>>>>>>>>>>>>> Бурение… … Энциклопедия инвестора
Турбовинтовой самолёт — Аббревиатуры ТВД Турбо винтовой двигатель ТРД Турбо реактивный двигатель ТРДД Турбо реактивный двухконтурный двигатель … Википедия
ПРОПЕЛЛЕР — (англ.). Отталкиватель; двигатель; винт в аэропланах и вообще винтовой двигатель. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. пропеллер (лат. propellere гнать, толкать) воздушный винт устройство для получения… … Словарь иностранных слов русского языка
РВД — рукава высокого давления РВД ротор высокого давления РВД регулятор высокого давления РВД реактор с водой под давлением РВД … Словарь сокращений и аббревиатур
Мальцов Сергей Иванович — Мальцов, Сергей Иванович известный деятель промышленности (1810 1893). Служил в гвардейской кавалерии; был адъютантом принца Петра Ольденбургского. В 1849 г. вышел в отставку генерал майором и посвятил себя управлению своими заводами. Он создавал … Биографический словарь
dic.academic.ru