





Электрический двигатель возвратно-поступательного движения состоит из цилиндрической формы ферромагнитного индуктора с обмоткой возбуждения и помещенного внутрь индуктора ферромагнитного подвижного якоря с короткозамкнутой обмоткой. Соотношение числа обмоток индуктора к числу обмоток якоря равно 2. Обмотка якоря расположена между обмоток индуктора с большим смещением к одной из них. Магнитопровод обмотки якоря образует единую магнитную цепь с магнитопроводом одной обмотки индуктора. Такое выполнение электродвигателя обеспечивает уменьшение массы его якоря и повышение надежности. 1 ил.
\Изобретение относится к области электромеханики, в частности к электрическим двигателям возвратно-поступательного движения (в.п.д.) с обмоткой возбуждения на индукторе и короткозамкнутой обмоткой на якоре. Такого рода двигатели часто в литературе называются индукционно-динамическими двигателями.
Известен электрический двигатель возвратно-поступательного движения индукционно-динамического типа, состоящий из плоского ферромагнитного индуктора с обмоткой возбуждения и якоря с короткозамкнутой обмоткой [1]. Недостатком такого электродвигателя является низкий кпд энергопреобразования, обусловленный значительными потоками рассеяния.
Существенно большим кпд обладает электродвигатель цилиндрической формы с ферромагнитными якорем и индуктором [2]. Однако такой двигатель выполняет работу, определяемую его функциональным назначением, при перемещении якоря лишь в одно крайнее положение, когда электромагнитная энергия преобразуется в механическую энергию движущегося якоря. Перемещение якоря назад (в другое крайнее положение) осуществляется под действием энергии, запасенной в упругих элементах, работа двигателем при этом не выполняется. Это снижает технические возможности и частоту повторения двигателем рабочих циклов.
В [3] (прототип) приведен двигатель, работа которым выполняется при перемещении его якоря как в одну, так и в другую сторону. Двигатель состоит из одной обмотки индуктора и двух обмоток якоря. Индуктор и якорь снабжены цилиндрическими магнитопроводами.
При необходимости переместить якорь двигателя в одну сторону по одной из обмоток индуктора пропускают импульс тока и электромагнитные силы действуют между этой обмоткой и одной из обмоток якоря, когда необходимо якорь двигателя переместить в другую сторону, вновь пропускают через эту же обмотку индуктора импульс тока, но теперь электромагнитные силы действуют между той же обмоткой индуктора, но уже другой, второй обмоткой якоря.
К недостаткам конструкции двигателя следует отнести следующее:
1. Обмотка индуктора, выполняемая многовитковой и с хорошей изоляцией, нагревается током в два раза больше, чем обмотка якоря, выполняемая одновитковой и не требующая специальной изоляции (обмотка индуктора запитывается импульсным током при каждом включении двигателя, а по обмоткам якоря ток протекает поочередно).
Это снижает надежность обмотки индуктора и двигателя в целом.
2. В конструкции двигателя по прототипу отношение числа обмоток индуктора к числу обмоток якоря равно 1/2. Поэтому при перемещении якоря как в одну, так и в другую сторону лишь одна из двух обмоток якоря с ферромагнитным магнитопроводом оказывается активным элементом якоря двигателя, а вторая обмотка с магнитопроводом остаются пассивными элементами, увеличивающими массу якоря. А это снижает кпд и быстродействие двигателя.
Целью предлагаемого изобретения является уменьшение массы якоря двигателя и повышение надежности.
Цель достигается тем, что в предлагаемой конструкции двигатель выполнен с соотношением числа обмоток индуктора к числу обмоток якоря равным 2, обмотка якоря расположена между обмоток индуктора с большим смещением к одной из них, обеспечивающим неодинаковое перекрытие пазов, причем магнитопровод обмотки якоря образует единую магнитную цепь с магнитопроводом одной обмотки индуктора.
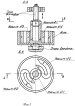
На чертеже изображен предлагаемый электродвигатель при верхнем (вид слева) и нижнем (вид справа) крайних (исходных) положениях якоря.
Стопорное устройство 1 двигателя жестко закреплено к индуктору 2, выполненному цилиндрическим ферромагнитным, например шихтованным из электротехнической стали и собранным в корпусе 3. В пазах индуктора расположены обмотки возбуждения 4, 5, расстояние X между которыми, может быть равным и нулю. Внутри индуктора, подвижно относительно его, помещен ферромагнитный якорь 6 с короткозамкнутой обмоткой 7, высота которой h.
Обмотка 7 якоря расположена между обмотками 4 и 5 индуктора, соосно с ними и смещена относительно середины каждой из них на расстоянии у1 и у2 соответственно. Причем у1≠у2. Таким смещением обмотки 7 относительно обмоток 4 и 5 обеспечивается перекрытие пазов обмотки 7 и одной из обмоток 4 или 5 на величину δ.
Якорь 6 с индуктором связан посредством фланца 8 и перекидного подпружинивающего устройства 9.
Следует отметить, что число обмоток 4 или 5 может быть и больше 2, но кратным 2. Число обмоток 7 якоря всегда в 2 раза меньше, чем обмоток индуктора.
В исходном положении, например, указанном на фиг.1 слева, якорь 6 подпружинивающим устройством 9 поджат к стопорному устройству 1, обмотка 7 якоря смещена относительно обмотки 5 на расстояние y1, a относительно обмотки 4 на расстояние у2, причем у2>у1. Паз обмотки 7 перекрывает паз обмотки 5 на величину 5. В связи с этим магнитопровод обмотки 7 якоря 6 образует единую магнитную цепь только с магнитопроводом обмотки 5.
При подаче в обмотку 5, смещенную относительно обмотки 7 на расстояние у1, импульса тока i1(t)(+) в магнитной системе двигателя возбуждается импульсный магнитный поток Ф(t). В результате хорошей магнитной связи обмоток 5 и 7, магнитопроводы которых образуют единую магнитную цепь, в обмотке 7 индуцируется ток i2(t)(-) обратной полярности. Ток i2(t) обуславливает магнитный поток, способствующий замыканию основной части потока Ф(t) через рабочий зазор δ, равный перекрытию пазов обмоток 5 и 7. Взаимодействие двух контуров (5 и 7) с токами i1(t) и i2(1) проявляется в действии на якорь 6 импульса силы F=i2·i1·dM/dδ, где М - взаимоиндуктивность. Перемещаясь, якорь 6 совершает какую-то механическую работу, определяемую его назначением, а обмотка 7 выходит из зоны взаимодействия с обмоткой 5, запитанной током i1(t). При этом перекрытие пазов δ обмоток 5 и 7 уменьшается, а перекрытие паза обмотки 7 с обмоткой 4 увеличивается, целостность магнитной цепи, образованной магнитопроводами обмоток 5 и 7, нарушается, а создается магнитная цепь, составленная из того же магнитопровода обмотки 7 и магнитопровода теперь уже обмотки 4. По мере перемещения якоря 6 перекрытия пазов δ, взаимоиндуктивность М, а потому и усилие F между обмотками 5 и 7 уменьшаются до нуля. Обмотку 5 обесточивают. При дальнейшем перемещении якоря под действием инерционных сил или сил предварительно сжатых упругих элементов перекидного подпружинивающего устройства взаимоиндуктивность и перекрытие пазов между обмотками 7 и теперь уже обмотками 4 возрастают до начальных значений М и δ.
В конце рабочего хода якоря практически вся его энергия расходуется на выполнение механической работы, характер которой определяется назначением двигателя, и лишь небольшая часть энергии якоря рассеивается при его соударении со стопорным устройством 1.
После перемещения якоря 6 двигателя на расстояние «а» он поджимается к стопорному устройству 1 перекидным подпружинивающим устройством 9 и удерживается им в нижнем крайнем положении (фиг.1 справа), характеризующимся перекрытием пазов δ обмоток 7 и 4, смещением у2<у1 и образованием магнитопроводами этих обмоток единой магнитной цепи.
Для повторного срабатывания двигателя переменным или импульсным током запитывают теперь уже обмотку 4 индуктора, имеющую у2<у1. При этом электромагнитные процессы в двигателе повторяются. Отличие будет лишь в том, что теперь якорь будет перемещаться вверх, совершая как и при перемещении вниз, какую-то работу. По перемещении вверх на расстояние «а» якорь 6 двигателя вновь перекидным устройством 9 устанавливается в исходном положении, обеспечивающем перекрытие пазов обмоток 5 и 7 на величину δ, смещение y2>y1 и образование магнитопроводами этих обмоток единой магнитной цепи.
Таким образом, в предлагаемой конструкции двигателя одна обмотка индуктора служит для перемещения якоря вниз, а другая - для перемещения якоря вверх. При этом обмотка 7 служит для перемещения якоря как вверх, так и вниз.
На чертеже не показан предмет, воздействуя на который якорь двигателя совершает механическую работу. Характер этой работы может быть самый разнообразный. Это и нанесение механических ударов с целью выполнения технологических операций, привод в действие возвратно-поступательных механизмов и т.д.
Использование конструкции двигателя с соотношением числа обмоток индуктора к числу обмоток якоря равным 2 уменьшает массу якоря по сравнению с прототипом в 2 раза. Объясняется это тем, что длина якоря, а потому и его масса при прочих равных условиях определяется числом обмоток якоря.
Уменьшение массы якоря позволяет увеличить кпд быстродействия и удельную мощность двигателя.
В предлагаемой конструкции двигателя в отличие от прототипа обмотки индуктора, выполняемые многовитковыми с хорошей изоляцией, работают поочередно и при прочих равных условиях нагреваются в 2 раза меньше, что повышает по сравнению с прототипом надежность ее работы. Обмотка якоря, выполняемая короткозамкнутой и одновитковой, не требует специальной изоляции, а потому в 2 раза больший ее нагрев по сравнению с обмоткой индуктора не снизит надежность ее работы.
Предлагаемую конструкцию двигателя предполагается использовать для привода вибратора источника сейсмических волн. Это позволит заменить дорогостоящий и не технологичный в изготовлении привод вибратора на электромеханический.
ЛИТЕРАТУРА
1. Патент США № 3585458, кл. 317-156, 1969.
2. Чуркин И.М. Электрический двигатель возвратно-поступательного движения. А.С. № 1012399, бюл. 14, 1983.
3. А.И.Блудов, A.M.Еленкин, В.В.Ивашин. Быстродействующий возвратно-поступательный механизм с электромагнитным ускорением и торможением П.Т.Э. № 4, 1973, стр.241-243.
Электрический двигатель возвратно-поступательного движения, состоящий из цилиндрической формы ферромагнитного индуктора с обмоткой возбуждения и помещенного внутрь индуктора ферромагнитного подвижного якоря с короткозамкнутой обмоткой, отличающийся тем, что двигатель выполнен с отношением числа обмоток индуктора к числу обмоток якоря, равному 2, обмотка якоря расположена между обмоток индуктора с большим смещением к одной из них, магнитопровод обмотки якоря образует единую магнитную цепь с магнитопроводом одной обмотки индуктора.
www.findpatent.ru
Изобретение относится к электротехнике, а точнее к линейным двигателям возвратно-поступательного движения. Линейный двигатель возвратно-поступательного движения содержит ферромагнитный ползун, установленный на жестко закрепленных относительно корпуса направляющих. У одного торца ползуна расположено возвратное устройство, у другого верхнего торца ползуна расположен магнит, ось намагничивания которого параллельна осям направляющих ползуна. Сбоку от ползуна установлен приводной двигатель, на валу которого закреплена в подшипниковых узлах вращающаяся часть, выполненная в виде диска с отверстиями, расположенными равномерно по периферии диска. Со стороны диска, обращенной к приводному двигателю, расположен источник лазерного излучения, жестко закрепленный относительно двигателя. Выходное отверстие источника лазерного излучения и отверстие в диске лежат на одной прямой, перпендикулярной и пересекающей направляющие ползуна. Технический результат заключается в повышении уровня безопасности при работе линейного двигателя возвратно-поступательного движения. 3 ил.
Изобретение относится к электротехнике, а точнее к линейным двигателям возвратно-поступательного движения.
Известны асинхронные линейные двигатели возвратно-поступательного движения. Разомкнутый статор с обмоткой таких двигателей выпрямлен, и ротор может осуществлять прямолинейное движение. В определенные моменты времени направление магнитного поля статора путем переключения обмотки статора изменяется на обратное и таким образом осуществляется возвратно-поступательное движение ротора (под ред. Петрова Г.Н. Электрические машины. М.-Л., ГЭИ, 1940, с.429).
Известен линейный двигатель возвратно-поступательного движения (Laithwaite E.R. Propulsion without wheels. Hart publishing company. Ins. New York City, 1966, р. 106-124), выбранный в качестве прототипа. Он имеет ферромагнитный ползун, расположенный на направляющих, которые жестко закреплены в корпусе. Ползун осуществляет движение под действием бегущего магнитного поля, которое создается статором линейного двигателя. Перемена направления движения ползуна на противоположное происходит под действием возвратного устройства, которое представляет собой статор линейного двигателя (этот статор аналогичен статору линейного двигателя прямого движения). Для перемены направления движения ползуна источник питания с помощью переключателя отключается от статора линейного двигателя прямого движения и подключается к статору линейного двигателя возвратного движения.
Как отмечается в описании прототипа (р. 106), одним из основных недостатков является то, что при работе переключателя между ними возникает искра, которая воздействует на его контакты, причем следующая искра более интенсивная. Описанное искрообразование обуславливает низкий уровень безопасности при работе прототипа.
Перед авторами стояла задача повышения уровня безопасности при работе линейного двигателя возвратно-поступательного движения.
Линейный двигатель возвратно-поступательного движения, содержащий ферромагнитный ползун, установленный на жестко закрепленных относительно корпуса направляющих, у одного торца ползуна расположено возвратное устройство, у другого верхнего торца ползуна расположен жестко закрепленный на корпусе магнит, ось намагничивания которого параллельна осям направляющих ползуна, сбоку от ползуна установлен приводной двигатель, на валу которого закреплена в подшипниковых узлах вращающаяся часть, выполненная в виде диска с отверстиями, расположенными равномерно по периферии диска, а со стороны диска, обращенной к приводному двигателю, расположен источник лазерного излучения, жестко закрепленный относительно двигателя, выходное отверстие которого и отверстие в диске лежат на одной прямой, перпендикулярной и пересекающей направляющие ползуна.
Предлагаемое устройство показано на фиг.1.
На фиг.2 показан вид с торца вращающейся части.
На фиг. 3 показано расположение ползуна на направляющих.
На вращающемся в подшипниковых узлах 1 (фиг.1) валу 2 приводного двигателя 3 жестко закреплена вращающаяся часть 4, выполненная в виде диска с отверстиями 5, расположенными равномерно по периферии диска (фиг.2). Источник лазерного излучения 6 (фиг.1) расположен таким образом, что его выходное отверстие 7 и отверстие 5 в диске 4 лежат на одной прямой. С другой стороны вращающейся части 4 перпендикулярно направлению излучения источника 6 установлены направляющие 8, на которых расположен ползун 9, выполненный из ферромагнитного материала (например, из железа, магнетита, никеля, карбида железа) (фиг.3). Ось возвратно-поступательного движения ползуна 9 (фиг.1) перпендикулярна направлению излучения источника 6. С одного торца ползуна 9 на корпусе 12 установлено возвратное устройство 10 (например, пружина), а с другого торца - магнит 11 (или постоянный магнит, или электромагнит). Возвратное устройство 10, направляющие 8 и магнит 11 жестко закреплены на корпусе 12.
Действие преобразователя основано на том, что выше точки Кюри (температуры фазового перехода) ферромагнетики теряют свои специфические свойства и становятся парамагнетиками. Значения точки Кюри для железа - 753 С, магнетита ~ 588С, никеля ~ 376С, карбида железа ~ 210С. При нагревании источником лазерного излучения 6 (например, лазер с активной средой СО2-N2 или алюмоиттриевый гранат с неодимом) ползуна 9 из ферромагнитного материала, последний, нагреваясь до определенной температуры, теряет свои ферромагнитные свойства.
С, магнетита ~ 588С, никеля ~ 376С, карбида железа ~ 210С. При нагревании источником лазерного излучения 6 (например, лазер с активной средой СО2-N2 или алюмоиттриевый гранат с неодимом) ползуна 9 из ферромагнитного материала, последний, нагреваясь до определенной температуры, теряет свои ферромагнитные свойства.
Работа устройства происходит следующим образом. Диск 4 вращается на валу 2 в подшипниковых узлах 1 с помощью приводного двигателя 3. В определенные моменты времени, когда отверстие 5 диска 4 находится напротив выходного отверстия 7 источника лазерного излучения 6, лазерный луч (не показан) достигает ползуна 9. Ползун 9 нагревается до температуры фазового перехода, называемой точкой Кюри, и теряет свои ферромагнитные свойства, в результате этого сила притяжения его к магниту 11 резко уменьшается и сила, создаваемая возвратным устройством 10, начинает преобладать над силой притяжения магнита 11. В результате сказанного ползун 9 начинает движение по направляющим 8, которые закреплены на корпусе 12. В те моменты времени, когда луч источника лазерного излучения 6 не проходит через диск 4, ползун 9, остывая, восстанавливает свои ферромагнитные свойства и начинает притягиваться к магниту 11, и возвращается на исходную позицию. Таким образом, завершается первый цикл возвратно-поступательного движения ползуна 9. Следует особо отметить, что скорость нагрева ползуна 9, а следовательно, и частота циклов его возвратно-поступательного движения, определяется размерами отверстий 5 и частотой вращения диска 4.
Отсутствие необходимости использовать коммутирующую аппаратуру (электрический переключатель) приводит к безыскровой работе изобретения, что обуславливает более высокий уровень безопасности при его работе. Особую актуальность это преимущество приобретает при работе во взрывоопасных помещениях.
Формула изобретения
Линейный двигатель возвратно-поступательного движения, содержащий ферромагнитный ползун, установленный на жестко закрепленных относительно корпуса направляющих, у одного торца ползуна расположено возвратное устройство, отличающийся тем, что у другого верхнего торца ползуна расположен жестко закрепленный на корпусе магнит, ось намагничивания которого параллельна осям направляющих ползуна, сбоку от ползуна установлен приводной двигатель, на валу которого закреплена в подшипниковых узлах вращающаяся часть, выполненная в виде диска с отверстиями, расположенными равномерно по периферии диска, а со стороны диска, обращенной к приводу двигателя, расположен источник лазерного излучения, жестко закрепленный относительно двигателя, выходное отверстие которого и отверстие в диске лежат на одной прямой, перпендикулярной и пересекающей направляющие ползуна.
РИСУНКИРисунок 1, Рисунок 2, Рисунок 3
Похожие патенты:

Изобретение относится к электромашиностроению и может быть использовано в автомобилестроении и моторостроении

Изобретение относится к электротехнике и может быть использовано в качестве привода различных исполнительных механизмов

Изобретение относится к области электротехники, в частности к подсистемам регулирования холостого хода

Изобретение относится к получению альтернативной энергии с помощью преобразования энергии постоянного магнита в механическую для использования его в паре с электрогенератором для получения электрической энергии

Изобретение относится к области электротехники, а именно к электромеханическим линейным исполнительным механизмам с периодическим изменением направления движения передачи осевого усилия при однонаправленной осевой нагрузке

Изобретение относится к преобразованию движения одного вида в движение другого вида, а конкретнее к устройствам преобразования вращательного движения в возвратно-поступательное

Изобретение относится к области электротехники и может быть использовано в нефтепромысловом оборудовании при добыче нефти


Изобретение относится к электротехнике, точному машиностроению, робототехнике, в частности к линейным шаговым электромеханизмам, преобразующим импульсы электроэнергии в дискретное линейное перемещение исполнительного механизма, и может быть использовано в силовых и управляемых электроприводах, осуществляющих линейное возвратно-поступательное перемещение рабочих органов без ограничения создаваемых усилий, например в робототизированных системах сварочного, монтажно-сборочного и складского профилей

Изобретение относится к области электротехники, в частности к электромагнитным двигателям с возвратно-поступательным перемещением исполнительного органа, и может быть использовано при создании приводов для дозировочных насосов, прессов и других механизмов


Изобретение относится к области электротехники, а именно к электромагнитным шаговым двигателям

Изобретение относится к области электротехники, а именно к электромагнитным двигателям

Изобретение относится к области электротехники, а именно к электродвигателям

Изобретение относится к электротехнике и может быть использовано в устройствах автоматического регулирования, контроля и управления с неограниченным углом поворота рабочего органа

Изобретение относится к области электротехники и может быть использовано в симметричных приводах исполнительных механизмов



Изобретение относится к электромагнитным исполнительным устройствам и может быть использовано в качестве линейного электропривода

Изобретение относится к машиностроению и может быть использовано для передачи движения механизмам и узлам, находящимся в вакуумных камерах технологических установок
Изобретение относится к электротехнике, а точнее к линейным двигателям возвратно-поступательного движения
www.findpatent.ru
\Изобретение относится к области электромеханики, в частности к электрическим двигателям возвратно-поступательного движения (в.п.д.) с обмоткой возбуждения на индукторе и короткозамкнутой обмоткой на якоре. Такого рода двигатели часто в литературе называются индукционно-динамическими двигателями.
Известен электрический двигатель возвратно-поступательного движения индукционно-динамического типа, состоящий из плоского ферромагнитного индуктора с обмоткой возбуждения и якоря с короткозамкнутой обмоткой [1]. Недостатком такого электродвигателя является низкий кпд энергопреобразования, обусловленный значительными потоками рассеяния.
Существенно большим кпд обладает электродвигатель цилиндрической формы с ферромагнитными якорем и индуктором [2]. Однако такой двигатель выполняет работу, определяемую его функциональным назначением, при перемещении якоря лишь в одно крайнее положение, когда электромагнитная энергия преобразуется в механическую энергию движущегося якоря. Перемещение якоря назад (в другое крайнее положение) осуществляется под действием энергии, запасенной в упругих элементах, работа двигателем при этом не выполняется. Это снижает технические возможности и частоту повторения двигателем рабочих циклов.
В [3] (прототип) приведен двигатель, работа которым выполняется при перемещении его якоря как в одну, так и в другую сторону. Двигатель состоит из одной обмотки индуктора и двух обмоток якоря. Индуктор и якорь снабжены цилиндрическими магнитопроводами.
При необходимости переместить якорь двигателя в одну сторону по одной из обмоток индуктора пропускают импульс тока и электромагнитные силы действуют между этой обмоткой и одной из обмоток якоря, когда необходимо якорь двигателя переместить в другую сторону, вновь пропускают через эту же обмотку индуктора импульс тока, но теперь электромагнитные силы действуют между той же обмоткой индуктора, но уже другой, второй обмоткой якоря.
К недостаткам конструкции двигателя следует отнести следующее:
1. Обмотка индуктора, выполняемая многовитковой и с хорошей изоляцией, нагревается током в два раза больше, чем обмотка якоря, выполняемая одновитковой и не требующая специальной изоляции (обмотка индуктора запитывается импульсным током при каждом включении двигателя, а по обмоткам якоря ток протекает поочередно).
Это снижает надежность обмотки индуктора и двигателя в целом.
2. В конструкции двигателя по прототипу отношение числа обмоток индуктора к числу обмоток якоря равно 1/2. Поэтому при перемещении якоря как в одну, так и в другую сторону лишь одна из двух обмоток якоря с ферромагнитным магнитопроводом оказывается активным элементом якоря двигателя, а вторая обмотка с магнитопроводом остаются пассивными элементами, увеличивающими массу якоря. А это снижает кпд и быстродействие двигателя.
Целью предлагаемого изобретения является уменьшение массы якоря двигателя и повышение надежности.
Цель достигается тем, что в предлагаемой конструкции двигатель выполнен с соотношением числа обмоток индуктора к числу обмоток якоря равным 2, обмотка якоря расположена между обмоток индуктора с большим смещением к одной из них, обеспечивающим неодинаковое перекрытие пазов, причем магнитопровод обмотки якоря образует единую магнитную цепь с магнитопроводом одной обмотки индуктора.
На чертеже изображен предлагаемый электродвигатель при верхнем (вид слева) и нижнем (вид справа) крайних (исходных) положениях якоря.
Стопорное устройство 1 двигателя жестко закреплено к индуктору 2, выполненному цилиндрическим ферромагнитным, например шихтованным из электротехнической стали и собранным в корпусе 3. В пазах индуктора расположены обмотки возбуждения 4, 5, расстояние X между которыми, может быть равным и нулю. Внутри индуктора, подвижно относительно его, помещен ферромагнитный якорь 6 с короткозамкнутой обмоткой 7, высота которой h.
Обмотка 7 якоря расположена между обмотками 4 и 5 индуктора, соосно с ними и смещена относительно середины каждой из них на расстоянии у1 и у2 соответственно. Причем у1≠у 2. Таким смещением обмотки 7 относительно обмоток 4 и 5 обеспечивается перекрытие пазов обмотки 7 и одной из обмоток 4 или 5 на величину δ.
Якорь 6 с индуктором связан посредством фланца 8 и перекидного подпружинивающего устройства 9.
Следует отметить, что число обмоток 4 или 5 может быть и больше 2, но кратным 2. Число обмоток 7 якоря всегда в 2 раза меньше, чем обмоток индуктора.
В исходном положении, например, указанном на фиг.1 слева, якорь 6 подпружинивающим устройством 9 поджат к стопорному устройству 1, обмотка 7 якоря смещена относительно обмотки 5 на расстояние y1, a относительно обмотки 4 на расстояние у2 , причем у2>у1. Паз обмотки 7 перекрывает паз обмотки 5 на величину 5. В связи с этим магнитопровод обмотки 7 якоря 6 образует единую магнитную цепь только с магнитопроводом обмотки 5.
При подаче в обмотку 5, смещенную относительно обмотки 7 на расстояние у1, импульса тока i1 (t)(+) в магнитной системе двигателя возбуждается импульсный магнитный поток Ф(t). В результате хорошей магнитной связи обмоток 5 и 7, магнитопроводы которых образуют единую магнитную цепь, в обмотке 7 индуцируется ток i2(t)(-) обратной полярности. Ток i2(t) обуславливает магнитный поток, способствующий замыканию основной части потока Ф(t) через рабочий зазор δ, равный перекрытию пазов обмоток 5 и 7. Взаимодействие двух контуров (5 и 7) с токами i1(t) и i2(1) проявляется в действии на якорь 6 импульса силы F=i2·i 1·dM/dδ, где М - взаимоиндуктивность. Перемещаясь, якорь 6 совершает какую-то механическую работу, определяемую его назначением, а обмотка 7 выходит из зоны взаимодействия с обмоткой 5, запитанной током i1(t). При этом перекрытие пазов δ обмоток 5 и 7 уменьшается, а перекрытие паза обмотки 7 с обмоткой 4 увеличивается, целостность магнитной цепи, образованной магнитопроводами обмоток 5 и 7, нарушается, а создается магнитная цепь, составленная из того же магнитопровода обмотки 7 и магнитопровода теперь уже обмотки 4. По мере перемещения якоря 6 перекрытия пазов δ, взаимоиндуктивность М, а потому и усилие F между обмотками 5 и 7 уменьшаются до нуля. Обмотку 5 обесточивают. При дальнейшем перемещении якоря под действием инерционных сил или сил предварительно сжатых упругих элементов перекидного подпружинивающего устройства взаимоиндуктивность и перекрытие пазов между обмотками 7 и теперь уже обмотками 4 возрастают до начальных значений М и δ.
В конце рабочего хода якоря практически вся его энергия расходуется на выполнение механической работы, характер которой определяется назначением двигателя, и лишь небольшая часть энергии якоря рассеивается при его соударении со стопорным устройством 1.
После перемещения якоря 6 двигателя на расстояние «а» он поджимается к стопорному устройству 1 перекидным подпружинивающим устройством 9 и удерживается им в нижнем крайнем положении (фиг.1 справа), характеризующимся перекрытием пазов δ обмоток 7 и 4, смещением у2<у1 и образованием магнитопроводами этих обмоток единой магнитной цепи.
Для повторного срабатывания двигателя переменным или импульсным током запитывают теперь уже обмотку 4 индуктора, имеющую у2 <у1. При этом электромагнитные процессы в двигателе повторяются. Отличие будет лишь в том, что теперь якорь будет перемещаться вверх, совершая как и при перемещении вниз, какую-то работу. По перемещении вверх на расстояние «а» якорь 6 двигателя вновь перекидным устройством 9 устанавливается в исходном положении, обеспечивающем перекрытие пазов обмоток 5 и 7 на величину δ, смещение y2>y1 и образование магнитопроводами этих обмоток единой магнитной цепи.
Таким образом, в предлагаемой конструкции двигателя одна обмотка индуктора служит для перемещения якоря вниз, а другая - для перемещения якоря вверх. При этом обмотка 7 служит для перемещения якоря как вверх, так и вниз.
На чертеже не показан предмет, воздействуя на который якорь двигателя совершает механическую работу. Характер этой работы может быть самый разнообразный. Это и нанесение механических ударов с целью выполнения технологических операций, привод в действие возвратно-поступательных механизмов и т.д.
Использование конструкции двигателя с соотношением числа обмоток индуктора к числу обмоток якоря равным 2 уменьшает массу якоря по сравнению с прототипом в 2 раза. Объясняется это тем, что длина якоря, а потому и его масса при прочих равных условиях определяется числом обмоток якоря.
Уменьшение массы якоря позволяет увеличить кпд быстродействия и удельную мощность двигателя.
В предлагаемой конструкции двигателя в отличие от прототипа обмотки индуктора, выполняемые многовитковыми с хорошей изоляцией, работают поочередно и при прочих равных условиях нагреваются в 2 раза меньше, что повышает по сравнению с прототипом надежность ее работы. Обмотка якоря, выполняемая короткозамкнутой и одновитковой, не требует специальной изоляции, а потому в 2 раза больший ее нагрев по сравнению с обмоткой индуктора не снизит надежность ее работы.
Предлагаемую конструкцию двигателя предполагается использовать для привода вибратора источника сейсмических волн. Это позволит заменить дорогостоящий и не технологичный в изготовлении привод вибратора на электромеханический.
ЛИТЕРАТУРА
1. Патент США № 3585458, кл. 317-156, 1969.
2. Чуркин И.М. Электрический двигатель возвратно-поступательного движения. А.С. № 1012399, бюл. 14, 1983.
3. А.И.Блудов, A.M.Еленкин, В.В.Ивашин. Быстродействующий возвратно-поступательный механизм с электромагнитным ускорением и торможением П.Т.Э. № 4, 1973, стр.241-243.
bankpatentov.ru
Союз Советскик
Социапистическик
Респубпик
О П И С А Н И Е ()928551
ИЗОБРЕТЕН ИЯ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авт. с вид-ву (22) Заявлено 15. 02. 80 (2! ) 2884238/24-07 с присоединением заявки № (23) Приоритет (5! )М. Кл.
Н 02 К 33/02
Государственный комитет
СССР (53) УДК 621.313.
17(088.8) Опубликовано 15 05 82. Бюллетень № 18
Дата опубликования описания 15 ° 05.82 по делам изобретений и открытий
В.А. Гришин и И.В. Гришин .(1 ь
Восточный научно-исследовательский йнститут --" по безопасности работ в горной промышленности (72) Авторы изобретения (71) Заявитель (54) ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНОПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
Изобретение относится к электротехнике и может быть использовано, например, для ударного разрушения горных пород.
Известен электродинамический возбудитель колебаний, содержащий статор, включающий внутренний и внешний магнитопровод, на одном из которых размещена обмотка переменного тока, и подвижный элемент, установленный в зазоре между магнитопроводами и несущей на себе электропроводные кольца 313.
Известен диэлектромагнитный двигатель возвратно-поступательного движения, содержащий рабочий орган, мутатор, состоящий из внутреннего и внешнегб магнитопровода с размещенными на них обмотками, и установленный между магнитопроводами подпружиненный подвижный цилиндрический элемент, имеющий чередующиеся кольцевые участки высокой и низкой электропроводности (2 ).
Недостатком этого устройства является сложность изготовления подвижного элемента, состоящего из отдельных скрепленных друг с другом кольцевых участков.
Цель изобретения - упрощение конструкции.
Поставленная цель достигается тем, что подвижный цилиндрический
1О элемент выполнен из электропроводного материала, а угомянутые кольцевые участки низкой электропроводности образованы за счет выполнения сквозных продольных прорезей
15 по окружности .упомянутого участка ° .
Кроме того, для повышения надежности, каждый последующий участок низкой электропроводности выполнен в направлении к рабочему органу с меньшим количеством прорезей, чем ., предыдущий, и они еаполнены диэлектриком.
На -фиг.1 представлен электромагнитный двигатель возвратно-поступа92855
3 тельного движения, продольное сечение, на фиг .. 2 — разрез А-А на фиг.1; на фиг. 3 - подвижный цилиндрический элемент; на фиг. 4 электрическая схема питания статор5 ных обмоток.
Электромагнитный двигатель возвратно-поступательного движения содержит внутренний и внешний магнитопровод статора с размещенными на них катушками и 2, смежные секции которых включены встречно. Подвижный цилиндрический элемент 3 содержит кольцевые зоны высокой 4 и низкой 5 электропроводности, которые чередуются. Зона низкой проводимости
5 образована за счет размещения прорезей б поперечно круговому индуктированному току. Зона низкой проводимости 5 может быть образована также зо высверливанием отверстий или вытачиванием кольцевых пазов .в полом цилиндре якоря 3. Количество щелей б или отверстий в этой зоне увеличивается в направлении от рабочего органа 7,который подпружинен упругим элементом
8. Щели 6 могут быть заполнены диэлектриком, например, армированным эпоксидным компаундом для увеличения прочности якоря 3.
Накопительный конденсатор(9 включен через токоограничитель !О и выпрямитель 11 в цепь питания пере% менного напряжения, а через тиристор
12 к низкоомным обмоткам 1 и 2 статора. В цепь управляющего электрода зз тиристора 12 включены последовательно регулируемое сопротивление 13 и замыкающиеся контакты 14 датчика положения якоря. Обмотки 1 и 2 статора шунтированы встречно вентилем 15.
Якорь подпружинен в прямом направлении с силой электромагнитного выталкивания упругим элементом 8 и жестко соединен с рабочим органом 7. Конструктивно датчик положения вкоря
/ 45 содержит подвижной контакт, закрепленный на якоре, и неподвижный на статоре. Замыкание контактов происходит при нагрузке на рабочем органе
7 в положении якоря, показанном на фиг. 2, при котором зона высокой 4 проводимости якоря располагается под. той половиной секции Катушек
1 и 2 статора, которая расположена ближе к рабочему органу 7. В случае отсутствия нагрузки на рабочем органе 7 якорь выдвигается под действием пружины 8 и контакты датчика
1 4 находя тся в разомкнутом состоянии. Датчик положения может быть выполнен на бесконтактных, например, индуктивных элементах.
Устройство работает следующим образом.
При включении устройства в сеть переменного напряжения накопительный конденсатор 9 заряжается через токоограничитель 10 и выпрямитель 11.
При наличии нагрузки и прижатия рабочего органа 7 к забою, статор перемещается в положение, показанное на фиг.2, в котором зоны высокой и низкой проводимости совмещаются с секциями катушек 1 и 2 статора. В этом положении контакты 14 датчика положения якоря замкнутся и тиристор 12 включится. Заряженный конденсатор 9 разрядится на обмотку секций катушек
1 и 2 статора. По аксиально смежным секциям катушек 1 и 2 протекает ток противоположного направления, образующий в кольцевом воздушном зазоре соответствующие магнитные потоки.
При этом в якоре, в зоне высокой проводимости будет индуктирован круговой ток противоположной по направлению току в секции катушек. Так как центры зоны высокой проводимости якоря смещены относительно середины секции, катушек 1 и 2 статора в сторону рабочего органа на 1/4 межполюсного расстояния, то в результате взаимодействия противоположных токов в секции катушек 1 и 2 статора и индуктированных токов в якоре возникает ударная сила выталкивания якоря в сторону рабочего органа. Сила уда-, ра передается рабочему органу 7 для ударного разрушения горной породы, Следует отметить, что смещение зо" ны высокой проводимости относительно секций катушек 1 и 2 статора, в момент разрядки конденсатора 9 достаточно иметь лишь у части якоря, например, только =o стороны противо" положной рабочему органу, так как это смещение необходимо лишь в начальный период движения, а далее движение якоря обеспечивается за счет взаимодействия токов статора и якоря..Этим обеспечивается не только повышение надежности конструкции
Ф якоря (не требуется иметь зон низкой проводимости в полом цилиндре якоря вблизи рабочего органа),но и более равномерное усилие в процессе движения якоря относительно статора.
5 9285
3а счет наличия пружины 8 контакты 14 датчика положения якоря без нагрузки на рабочем органе 7 остаются разомкнуты и поэтому работа устройства в холостую исключается. 5
Регулирование энергии удара производится переменным сопротивлением
13, позволяющим изменять уровень заряда накопительного конденсатора 9.
Формула изобретения
1. Электромагнитный двигатель возвратно-поступательного движения, содержащий рабочий орган, статор, состоящий из внутреннего и внешнего магнитопровода с размещенными на них обмотками, и установленный между магнитопроводами подпружиненный подвижный цилиндрический элемент, имеющий чередующиеся кольцевые участки высокой и низкой электропроводности, отличающийся тем, что, с целью упрощения конструкции, подвижный цилиндрический элемент выполнен из электропроводного материала, а упомянутые кольцевые участки низкой электропроводности образованы за счет выполнвния сквозных продольных прорезей по окружности упомянутого участка.
2. Электромагнитный двигатель по и 1, отличающийся тем, что, с целью повышения надежности, каждый последующий участок низкой электропроводности выполнен в -направлении к рабочему органу с меньшим количеством прорезей, чем предыдущий, и они заполнены диэлектриком.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР
N 250273, кл. Н 02 К 33/18, 1965.
2. Авторское свидетельство СССР
У 425279, кл. Н 02 К 33/12, 1971.
1 2
92й51
Составитель С. Венгржановская
Техред E. баритончик . Корректор С. Щомак
Редактор Н. Воловик
Тираж 719 Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/ 5
Заказ 3277/71 филиал ППП "Патент", г. Ужгород, ул. Проектная,4




www.findpatent.ru
Изобретение относится к электрическим двигателям с возвратно-поступательным движением якоря. Технический результат: повышение надежности за счёт обеспечения защиты постоянных магнитов от посторонних механических воздействий. Электродвигатель содержит цилиндрический корпус 1, индуктор (статор) 2, по крайней мере две центрирующие опоры 3, а также якорь, который установлен в корпусе 1 с возможностью возвратно-поступательного движения вдоль оси корпуса. Якорь содержит шток 4, множество постоянных магнитов 5, множество разделительных колец 6 и множество цилиндрических втулок 7. Шток 4 и кольца 6 выполнены из диамагнитного материала. Магниты 5 изготовлены из редкоземельных элементов с поперечным намагничиванием. Втулки 7 выполнены из ферромагнитного материала. Втулки 7 и кольца 6 расположены на штоке 4 с чередованием друг относительно друга, так что любые две смежные втулки 7 своими обращенными друг к другу торцами совместно с внутренней поверхностью расположенного между ними разделительного кольца 6 образуют капсулу, в которой свободно расположен соответствующий магнит 5 с ориентацией его полюсов вдоль оси корпуса 1. При этом любые два смежных магнита 5 установлены с ориентацией друг к другу одинаковыми полюсами. 1 з.п. ф-лы, 1 ил.
Область техники
Изобретение относится к электрическим двигателям с возвратно-поступательным движением якоря, содержащим системы неподвижных катушек, питаемых меняющим направление током, и характеризующихся приведением якоря в движение в результате взаимодействия электромагнитного поля катушек с магнитным полем постоянных магнитов якоря.
Уровень техники
Известен привод на постоянных магнитах, содержащий ротор (якорь), выполненный в виде стержневого постоянного магнита, перемещающегося внутри направляющей трубки, статор (индуктор), размещенный на направляющей трубке, обмотки возбуждения, при этом статор выполнен в виде стержневых постоянных магнитов, размещенных с двух сторон направляющей трубки симметрично относительно ротора и находящихся внутри обмоток возбуждения, соединенных с блоком импульсного перемагничивания (Авторское свидетельство СССР №860227, М., кл. H02K 33/00, опубликовано 30.08.1981, Бюлл. №32).
Признаки известного привода на постоянных магнитах, совпадающие с признаками заявленного изобретения, заключаются в наличии статора (индуктора), а также ротора (якоря), содержащего постоянный магнит.
Причина, препятствующая получению в известном приводе на постоянных магнитах технического результата, который обеспечивается заявленным изобретением, заключается в необходимости перемагничивания статорных постоянных магнитов, что обусловливает низкий КПД преобразования энергии, в выполнении ротора в виде стержневого магнита, что обусловливает малую величину перемещения якоря, отсутствие возможности удержания якоря в промежуточных положениях и отсутствие возможности регулирования достижимой механической мощности, что в целом ограничивает сферу применения привода.
Наиболее близким аналогом (прототипом) является привод на постоянных магнитах, содержащий цилиндрический корпус из магнитомягкого железа, внутри которого размещен каркас из немагнитного материала с кольцевой индуктивной катушкой, внутри которой размещен способный к возвратно-поступательному перемещению якорь с кольцевыми постоянными магнитами, закрепленными на оси из магнитомягкого железа, при этом кольцевые постоянные магниты имеют радиальную намагниченность с одноименными магнитными полюсами по кольцу на внешней образующей и размещены на оси по центру с зазорами один относительно другого, а число кольцевых постоянных магнитов определяет необходимую мощность привода (Патент RU №94391 U1, М., кл. H02K 33/00, приоритет от 20.10.2009, опубликовано 20.05.2010).
Признаки известного привода на постоянных магнитах, совпадающие с признаками заявленного изобретения, заключаются в том, что он содержит цилиндрический корпус, внутри которого размещен каркас из немагнитного материала с кольцевой индуктивной катушкой (индуктор), внутри которой размещен способный к возвратно-поступательному перемещению якорь с кольцевыми постоянными магнитами, закрепленными на оси, при этом кольцевые постоянные магниты расположены с зазорами один относительно другого.
Причина, препятствующая получению в известном приводе на постоянных магнитах технического результата, который обеспечивается заявленным изобретением, заключается в том, что постоянные магниты якоря непосредственно закреплены на оси якоря, находятся в непосредственном силовом взаимодействии с электромагнитным полем индуктора и вследствие этого не защищены от посторонних механических воздействий. Это приводит к снижению надежности известного привода по причине того, что материал, из которого выполнены постоянные магниты, не является достаточно прочным.
Раскрытие изобретения
Задача, на решение которой направлено изобретение, заключается в повышении надежности конструкции электродвигателя. Технический результат, опосредствующий решение указанной задачи, заключается в обеспечении защиты постоянных магнитов якоря от посторонних механических воздействий путем капсулирования этих магнитов.
Достигается указанный технический результат тем, что электродвигатель с возвратно-поступательным движением якоря содержит цилиндрический корпус с неподвижно установленным в нем индуктором, выполненным с возможностью создания бегущего магнитного поля в направлении оси корпуса, по крайней мере две центрирующие опоры, а также якорь, который установлен в корпусе с возможностью возвратно-поступательного движения вдоль оси корпуса и который содержит шток, расположенный при помощи центрирующих опор на оси корпуса и выполненный из диамагнитного материала, множество цилиндрических втулок, выполненных из ферромагнитного материала, множество разделительных колец, выполненных из диамагнитного материала, и множество постоянных магнитов, при этом втулки и разделительные кольца расположены на штоке с чередованием друг относительно друга и установлены неподвижно относительно штока, так что любые две смежные втулки своими обращенными друг к друга торцами совместно с внутренней поверхностью расположенного между ними разделительного кольца образуют капсулу, в которой свободно расположен соответствующий магнит с ориентацией его полюсов вдоль оси корпуса, при этом любые два смежных магнита установлены с ориентацией друг к другу одинаковыми полюсами.
Технический результат достигается также тем, что шток и разделительные кольца выполнены из нержавеющей стали, а втулки - из конструкционной стали.
Признаки заявленного технического решения, отличные от прототипа, заключаются в том, что якорь содержит множество цилиндрических втулок, выполненных из ферромагнитного материала, а также множество разделительных колец, выполненных из диамагнитного материала, при этом втулки и разделительные кольца расположены на штоке с чередованием друг относительно друга и установлены неподвижно относительно штока, так что любые две смежные втулки своими обращенными друг к друга торцами совместно с внутренней поверхностью расположенного между ними разделительного кольца образуют капсулу, в которой свободно расположен соответствующий магнит с ориентацией его полюсов вдоль оси корпуса, при этом любые два смежных магнита установлены с ориентацией друг к другу одинаковыми полюсами.
Краткое описание чертежей
На прилагаемой фигуре схематично в продольном сечении показан заявленный электродвигатель.
Осуществление изобретения
Электродвигатель с возвратно-поступательным движением якоря содержит цилиндрический корпус 1, индуктор (статор) 2, по крайней мере две центрирующие опоры 3, а также якорь, который установлен в корпусе 1 с возможностью возвратно-поступательного движения вдоль оси корпуса 1 и который содержит шток 4, множество постоянных магнитов 5, множество разделительных колец 6 и множество цилиндрических втулок 7.
Индуктор 2 неподвижно установлен в корпусе 1 и представляет собой множество катушек, образующих трехфазную обмотку, выполненную с возможностью создания бегущего магнитного поля в направлении оси корпуса 1.
Центрирующие опоры 3 выполнены из антифрикционного материала и предназначены для обеспечения расположения штока 4 на оси корпуса 1. На прилагаемой фигуре показаны две центрирующие опоры 3, которые являются концевыми. Другие варианты выполнения электродвигателя кроме концевых могут содержать также промежуточные центрирующие опоры (на фиг. не показаны).
Шток 4 благодаря центрирующим опорам 3 расположен по оси корпуса 1 и выполнен из диамагнитного материала, преимущественно из нержавеющей стали. Магниты 5 изготовлены из редкоземельных элементов с поперечным намагничиванием. При этом каждый магнит 5 имеет форму цилиндра, две боковые (торцевые) поверхности которого являются двумя разноименными полюсами N и S. Разделительные кольца 6 выполнены из диамагнитного материала, преимущественно из нержавеющей стали. Цилиндрические втулки 7 выполнены из ферромагнитного материала, преимущественно из конструкционной стали.
Цилиндрические втулки 7 и разделительные кольца 6 расположены на штоке 4 с чередованием друг относительно друга и при помощи концевых гаек (на фиг. не показаны) установлены неподвижно относительно штока 4 (т.е. скреплены со штоком 4), так что любые две смежные втулки 7 своими обращенными друг к другу торцами совместно с внутренней поверхностью расположенного между ними разделительного кольца 6 образуют капсулу (полость), в которой свободно расположен соответствующий магнит 5 с ориентацией его полюсов вдоль оси корпуса 1. При этом любые два смежных магнита 5 установлены с ориентацией друг к другу одинаковыми полюсами (S к S, N к N).
Работа электродвигателя заключается в следующем.
Трехфазная обмотка индуктора (статора) 2 питается от преобразователя частоты (не показан). При подаче питающего напряжения в обмотках индуктора 2 создается бегущее магнитное поле, скорость движения которого пропорциональна частоте питающего напряжения. В момент пуска электродвигателя на обмотки индуктора 2 подается трехфазное напряжение пониженной частоты, вследствие чего полюса бегущего поля и полюса постоянных магнитов 5 через втулки 7 сцепляются друг с другом и скорость перемещения якоря и скорость бегущего поля будут равны. По мере разгона частота питающего напряжения и скорость якоря увеличиваются и далее движение идет с постоянной скоростью. Затем происходит уменьшение скорости до нуля (т.е. торможение) и последующий реверс якоря, который после этого движется в обратную сторону до исходного положения. Далее цикл работы повторяется.
1. Электродвигатель с возвратно-поступательным движением якоря, который содержит цилиндрический корпус с неподвижно установленным в нем индуктором, выполненным с возможностью создания бегущего магнитного поля в направлении оси корпуса, по крайней мере две центрирующие опоры, а также якорь, который установлен в корпусе с возможностью возвратно-поступательного движения вдоль оси корпуса и который содержит шток, расположенный при помощи центрирующих опор на оси корпуса и выполненный из диамагнитного материала, множество цилиндрических втулок, выполненных из ферромагнитного материала, множество разделительных колец, выполненных из диамагнитного материала, и множество постоянных магнитов, при этом втулки и разделительные кольца расположены на штоке с чередованием друг относительно друга и установлены неподвижно относительно штока, так что любые две смежные втулки своими обращенными друг к другу торцами совместно с внутренней поверхностью расположенного между ними разделительного кольца образуют капсулу, в которой свободно расположен соответствующий магнит с ориентацией его полюсов вдоль оси корпуса, при этом любые два смежных магнита установлены с ориентацией друг к другу одинаковыми полюсами.
2. Электродвигатель по п. 1, в котором шток и разделительные кольца выполнены из нержавеющей стали, а втулки - из конструкционной стали.
www.findpatent.ru
Использование: в электротехнике для получения регулируемых силовых магнитных связей перемещающихся звеньев в любых приводах. Сущность изобретения: два неподвижных постоянных магнита 1,2 статора , в зазоре между которыми расположен постоянный магнит 3 якоря, перемещающийся вдоль зазора и снабженный обмоткой 4 управления . Направления намагничивания магнитов 1, 2 статора и обмотки 4 совпадают и противоположны направлению намагничивания магнита 3 якоря. Такое выполнение позволяет расширить эксплуатационные возможности путем увеличения рабочего хода якоря. 1 з.п. ф-лы, 3 ил.
союз соВетских
СОЦИАЛИСТИЧЕСКИХ
РЕСПУБЛИК (5!)5 Н 02 К 33/00
ГОСУДАРСТВЕ ННЫИ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПРИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ /улр
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4784430/07 (22) 17.01.90 (46) 30.08.92, Бюл. ¹ 32 (71) Научно-исследовательский институт прикладной математики и механики МГТУ им. Н,Э.Баумана (72) А.Г,Поляков, Е.В.Гаген и А.M.Êîöþáèíский (56) Авторское свидетельство СССР
¹ 972636, кл. Н 02 К 33/02, 1982.
Авторское свидетельство СССР
¹ 1658310, кл, Н 02 К 33/00, 1988. (54) ДВИ!" АТЕЛЬ ВОЗВРАТНΠ— ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ Ы,, 1758789 А1 (57) Использование: в электротехнике для получения регулируемых силовых магнитных связей перемещающихся звеньев в любых приводах. Сущность изобретения: два неподвижных постоянных магнита 1, 2 статора, в зазоре между которыми расположен постоянный магнит 3 якоря, перемещающийся вдоль зазора и снабженный обмоткой 4 управления. Направления намагничивания магнитов 1, 2 статора и обмотки 4 совпадают и противоположны направлению намагничивания магнита 3 якоря. Такое выполнение позволяет расширить эксплуатационные возможности путем увеличения рабочего хода якоря. 1 з.п, ф-лы, 3 ил.
1758789
Изобретение относится к силовым устройствам с постоянными магнитами и может быть использовано для получения регулируемых силовых магнитных связей перемещающихся звеньев в любых приводах, Известна система с пружинным эффектом и регулируемым возвращающим усилием, имеющая по крайней мере один магнит, в магнитном поле которого находится по крайней мере один проводник, питаемый током (якорь). В этой системе пружинный эффект и возвращающее усилие осуществляются за счет перемещения якоря вдоль поверхности магнита при подаче на обмотку регулируемого напряжения.
Недостатком устройства является низкая надежность функциокирования„так как возможны падекия якоря на неподвижный магнит при отключении питающего напряжения и небольшая величина тягового усилия.
Наиболее близким к изобретению по технической сущности и положительному эффекту является электромагнитный вибратор, содержащий два постоянных магнита, образующих статор и якорь, и обмотку управления. Один иэ магнитов выполнен кольцевым, другой — цилиндрический расположен в его внутренней полости. Направление камагничивания магнигов и обмотки — осевое, Эта система обладает более высокой надежностью, так как в ней принципиально невозможно падение якоря на статор при отключении питания и исключено соударение магнитов статора и якоря, Однако ус ройство имеет недостаточно большой ход якоря, так как используется аксиальное взаимодействие пОстоянных магнитов ста ора и якоря, силовая характеристика имеет резко падающий гиперболический характер, поэтому ухудшаются эксп луатацион н ые возможности.
Цель изобретения — расширение эксплуагационных возможностей путем увеличения рабочего хода якоря.
Поставленная цель достигается тем, что двигатель возвратно-поступательного движения снабжен J:,.>AÎëíèTÂëüíèì постоянным магнитом статора, расположенным параллельно основному магниту статора и имеющим направление намагниченности, совпадающее с направлением последнего, а магнит якоря размещен в зазоре между магнитами статора так, что его полюса одноименны смежным полюсам постоянных магнитов статора, причем витки обмотки управления закреплены на якоре перпендикулярно направлеки о его намагниченности.
Кроме того, постоянные магниты статора и якоря выполнены призматическими, На фиг. 1 и 2 изображен двигатель возвратно-поступательного движения; на фиг, 3 — графики силовых характеристик предлагаемого устройства.
5 Двигатель возвратно-поступательного движения содержит два неподвижных постоянных магнита 1, 2, жестко закрепленных между собой, соосно которым расположен постоянный магнит 3, являю10 щийся якорем системы и.имеющий возможность перемещаться в немагнитном зазоре. магнитов 1, 2 вдоль стрелки F, а также обмотка управления 4, жестко закрепленная на якоре. причем выводы обмотки 4 подклю15 чены к источнику регулируемого постоянного напряжения 0упр 5,,Двигатель возвратно-поступательного движения работает следующим образом.
В общем случае на якорь системь1 в виде
20 подвижного постоянного магнита 3 с намагниченностью Ыз и объемом Vs действует суммарн эя сила F !, определяемая как градиент энэргии W намагниченного объема
25 маг = Я ад М =- — pa Ягаб 1,> МзН cia), (1) з где Н вЂ” вектор суммарной напряженности магнитного поля, в котором находится магHHT 3, 30
Н =Н1+Н2+Ну р4 где Н1 = 1(М1) — напряженность магнитного поля, созданная постоянным магнитом 1, определяемая его геометрией и величиной намагниченности М1;
Н2 = f(M2) — напряженность магнитного поля, созданная постоянным магнитом 2, определяемая его геометрией и величиной
40 намагниченности М2;
Hypp4 = f(lyop4) — НаПРЯжЕННОСтЬ МаГНИтного поля, созданная обмоткой управления
4, т.е, за счет витков с током обмотки управления, и onðåäeëëåìàÿ геометрией обмотки
45 управления, величиной и направлением тока управления 1упр в ней.
3 двигателе возвратно-поступательного движения эффективно применение высококоэрцитивных постоянных магнитов, для которых имеет место свойство постоянной намагниченности, жестко направленной по оси Х с ортом Х, перпендикулярным направлению 7 действия силы F на чертеже двигателя возвратно-поступательного дви55 жения, г,е.
M1 — M1xXo, Ы2 — t42xXo, M3 — Ыэх о, Ч1х = СОПЗТ; Ы2х = СОПЯ; Ызх = СОПЗТ, 1758789
lynp4 = + (IW)ynp4:
Н»упр4 = гот х А4
Гмаг = Рмагт Zo
Управляющее воздействие можно записать следующим образом т,е. управляющее воздействие определяется ампер-витками обмотки управления (с возможной сменной полярности) и ее геометрией, Напряженность магнитного поля, созданная обмоткой управления, в рассматриваемом двигателе возвратно-поступательного движе ния будет иметь составляющую вектора поля, направленную по оси Х обмотки управления, параллельную намагниченностям постоянНЫХ МаГНИтОВ М1». М2», МЗ», т.Е. Hxynp(lynp4), которая при скалярном произведении с Мз» в формуле (1) даст составляющую F»i, отличную от нуля /Гмаг будет направлена по оси Z параллельно действию внешней силы
F на чертеже двигателя возвратно-поступательного движения. Наличие составляющей
Н»упр4 СЛЕДУЕТ ИЗ УРаВНЕНИЯ ДЛЯ ВЕКТОРНОГО потенциала А контуров с током и связи (см. например Бессонов Л.А. Теоретические основы электротехники: Электромагнитное поле, M.: Высшая школа, 1978, с. 95, где рассмотрено поле кругового витка с током, аналогичные формулы будут и для прямоугольных контуров, направление в данной книге соответствует направлению Х в данном ответе). Составляющие напряженности магнитного поля обмотки управления, перпендикулярные полю постоянных магнитов, не дадут составляющих FMar, так как скалярное произведение двух перпендикулярных вектоРов в фоРмУле {1) {M4» и +zynp) РавнЯется нулю.
На основе этого для тягового усилия двигателя возвратно-поступательного движения, действующего на якорь, справедливо следующее уравнение маГе я / ОМЗ fóН»1(М1»)С /+ з
+ (— Hx2(M2x)(IV + ) — Н,рпрп(!П)рпрпбр) д д д2 BZ
УЗ УЗ
На основании формулы (2) следует, что регулируя ток в обмотке управления 4, за счет последнего слагаемого в формуле (2) регулируется и тяговое усилие в магнитной системе
40 привода, Изменение силовых характеристик показано на фиг, 3, Применение обмотки управления 4, расположенной на подвижном магните 3 в зазоре неподвижных ма(нитов 1, 2, требуется для обеспечения необходимой глубины регулирования тягового усилия по всей зоне перемещения якоря 3.
Расширение эксплуатационных возможностей двигателя возвратно-поступательного движения путем увеличения рабочего хода якоря 3 обеспечивается тем, что подвижный постоянный магнит 3, расположенный между неподвижными полюсами магнитов статора
1, 2, намагничен так, что его полюса являются одноименными смежным полюсам неподвижных магнитов 1, 2 и, следовательно, якорь
3 испытывает отталкивание. При действии на якорь 3 внешних возмущающих сил F, направленных по оси Z на чертеже двигателя возвратно-поступательного движения, участок А-В характеристики (фиг, 3) характеризуется большой жесткостью. При дальнейшем перемещении якоря 3 под действием внешних возмушающих сил вдоль действия стрелки F, жесткость силовой характеристики уменьшается и приближается к нулю (участок
В-С, фиг, 3), Это происходит ввиду того, что при данном перемещ нии якоря 3 используется тангенциальное взаимодействие между подвижным и неподвижными постоянными магнитами, Величина и жесткость линейной части характеристики (фиг. 3) зависит от геометрии постоянных магнитов, Применение предлагаемого двигателя возвратно-поступательного движения выгодно отличается от применения других аналогичных систем увеличенным ходом якоря в условиях повышенной жесткости и воэможностью управления величиной тягового усилия.
Формула изобретения
1. Двигатель возвратно-поступательного движения, содержащий постоянные магниты статора и якоря, имеющие противоположные направления намагничивания, а также обмотку управления, расположенную соосно с направлением намагниченности постоянных магнитов, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем увеличения рабочего хода якоря, устройство снабжено дополнительным магнитом статора, расположенным параллельно основному магниту статора и с тем же направлением намагничивания, а магнит якоря размещен в зазоре между магнитами статора так, что его полюса одноименны смежным полюсам магнитов статора, а
1758789
А-4
4.
Составитель А. Коцюбинский
Редактор И.Касарда Техред М.Моргентал Корректор Н.Тупица
Заказ 3008 Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР
113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 витки обмотки управления расположены на якоре перпендикулярно направлению его намагничивания.
2. Двигатель по и. 1, о т л и ч а ю щ и йс я тем, что постоянные магниты статора и якоря выполнены призматической формы,




www.findpatent.ru
Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия. Цель изобретения - повышение КПД. Устройство выполнено в виде цилиндрического магнитопровода с торцовыми и средним полюсом, катушками прямого 1 и обратного 2 хода. Якорь 3 с продольным отверстием расположен в полости магнитопровода. На заднем конце якоря выполнена конусная проточка, в которой размещен конусный захват 8, движение которгого ограничено упором 10. В отверстии якоря размещены трубчатая втулка 6 с упором 7 и боек 11 с упором 12. В переднем торце устройства размещена пружина-фиксатор бойка, в заднем амортизатор. Повышение КПД достигается за счет обеспечения свободного хода бойка 11 до удара по хвостовику держателя, инструмента .13 при освобождении конусного захвата 8 после разгона бойка 11 якорем 3 до рабочей скорости . 2 ил.
СОЮЗ СОВЕТСКИХ социАлистических
РЕСПУБЛИК (я)5 H 02 К 33/12
ГОСУДАРСТВЕННЫЙ КОМИТЕТ
ПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ
ПГИ ГКНТ СССР
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
° le
МФ
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (21) 4775581/07 (22) 29 12.89 (46) 23.03.92. Бюл. hL 11 (71) Усть- Каменогорский строительно-дорожный институт (72) К. М. Дусалиев (53) 62 1.313;283(088.8) (56) Авторское свидетельство СССР
М 1601708, кл. Н 02 K 33/12, 1988.
Авторское свидетельство СССР
1Ф 1424103, кл. Н 02 К 33/12, 1986, (54). ЭЛЕКТРОДВИГАТЕЛЬ ВОЗВРАТНОПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ (57) Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия. Цель изобретения — повышение КПД. Устройство выполнено в виИзобретение относится к электромашиностроению, строительному и горному машиностроению. в частности к линейным . двигателям и устройствам ударного действия (молоткам, бурильным машинам).
Известен электромагнитный двигатель возвратно-поступательного движения, содержащий. электромагнит с поршнем-якорем, поршневая часть которого размещена в цилиндре. При рабочем ходе поршня происходит сжатие воздуха в передней камере цилиндра, и обратный ход совершается эа . счет. давления сжатого воздуха в этой камере. Поэтому при работе возникают потери энергии, связанные с сжатием газа в передней камере цилиндра. Это снижает КПД двигателя.
5U 1721740 А1 де цилиндрического магнитопровода с торцовыми и средним полюсом, катушками прямого 1 и обратного 2 хода. Якорь 3 с продольным отверстием расположен в полости магнитопровода. На заднем конце якоря выполнена конусная проточка, в которой размещен конусный захват 8, движение которгого ограничено упором 10. В отверстии якоря размещены трубчатая втулка 6 с упором 7 и боек 11 с упором 12. В переднем торце устройства размещена пружина-фиксатор бойка. в заднем амортизатор. Повышение КПД достигается за счет обеспечения свободного хода бойка 11 до удара по хвостовику держателя. инструмента 13 при освобождении конусного захвата 8 после разгона бойка 11 якорем 3 до рабочей скорости. 2 ил, ° юввЪ
Известен также электромагнитный дви- . 4 гатель возвратно-поступательного движения, содержащий цилиндрический магнитопровод с полюсами. катушки прямо- Д го и обратного хода, подвижную направля- Д. ющую трубу и ферромагнитную подвижную направляющую с торцовыми фланцами-ограничителями, в полости которой расположен якорь.
Якорь выполняет одновременно функцию элемента магнитопровода и бойка, поэтому он изготовлен из магнитотвердого материала. При работе двигателя происходят потери энергии, что приводит к снижению КПД.
Известен наиболее близкий к предлагаемому электродвигатель возвратно-поступательного движения, содержащий статор, 1721740 выполненный в виде цилиндрического магнитопровода с полюсами,в котором размещена катушка прямого хода, якорь, расположенный в полости магнитопровода, боек и втулку с ограничителями хода, амортизатор и 5 хвостовик держателя рабочего инструмента.
При работе обратный ход бойка и якоря совершается за счет упругой силы амортизатора. При прямом ходе часть энергии затра- 10 чивается на сжатие пружины амортизатора, что приводит к снижению КПД устройства.
Целью изобретения является повышение КПД электродвигателя.
Указанная цель достигается тем, что иэ- 15 вестный электродвигатель возвратно-поступательного движения, содержащий статор, выполненный в виде цилиндрического магнитопровода с полюсами, в котором размещена катушка прямого хода, якорь, 20 расположенный в полости магнитопровода, боек с ограничителем хода, выполненным в виде кольцевого выступа, втулку с orðàíè÷èтелем хода, расположенную между якорем и бойком, амортизатор и хвостовик иистру- 25 мента, снабжен катушкой обратного хода, захватом, упором для захвата, плоской пружиной-фиксатором бойка. Причем магнитопровод .выполнен с дополнительным полюсом, размещенным в его средней час- 30 ти. Катушка прямого хода размещенамежду передним и средним, а катушка обратного хода между задним и средним полюсами. В якоре выполнено продольное отверстие с коиусиой расточкой на заднем конце, вт ул- 35 ка расположена в продольном отверстии якоря и выполнена в виде кольцевой трубки, немзгнитной, с кольцевым упором в передней части. Боек расположен в отверстии втулки, пружина-фиксатор закреплена на 40 переднем. а амортизатор на заднем торце статора. Захват выполнен из немагнитного материала в виде конуса с осевым отверстием, равным по диаметру внешнему диаметру бойка, углом коиусности, равным углу 45 расточки заднего конца якоря, снабжен пружинящими надсечками и установлен на бойке между якорем и упором для захвата, закрепленным на заднем конце якоря, Длина втулки от заднего конца до упора втулки 50 . меньше длины якоря не менее чем на величину осевой длины захвата, а длина бойка от заднего конца до упора бойка превышает расстояние от амортизатора до переднего торца упора втулки. 55
На фиг. 1 изображен предлагаемый электродвигатель, продольный разрез; на фиг. 2 — то же, поперечный разрез А-А, Электродвигатель возвратно-поступательного движения содержит соленоидные электромагниты прямого 1 и обратного 2 хода с катушками, цилиндрическими магнитопроводзми и полюсами. а также якорь 3, в котором выполнено продольное отверстие
4 с конусной расточкой 5 на заднем торце.
Втулка 6 в виде кольцевой трубки (немагнитной) с упором 7 в передней части свободно расположена в продольном отверстии 4 якоря. В конусной расточке 5 якоря 3 размещен захват 8 в виде конуса с осевым отверстием, Захват 8, выполненный из немагнитного материала, снабжен пружинящими надсечками 9. С заднего торца якоря 3 закреплены упоры 10, ограничивающие возможное продольное перемещение захвата 8. В полости втулки 6 размещен с возможностью движения боек 11, нз котором в передней части его выполнен упор 12. В передней части двигателя установлен инструмент 13. а в задней части — амортизатор, включающий корпус 14 и подпружиненный поршень 15.
В держателе инструмента 13 расположена плоская пружина-фиксатор 16.
Двигатель работает следующим образом.
Питание обмоток катушек электромагнитов осуществляется короткими импульсами тока. Пусть якорь 3, боек 11, втулка 6 и захват 8 находятся в крайних положениях, показанных на фиг. 1, При подаче импульса тока на обмотку катушки электромагнита 1 пор действием возникающей электромагнитной силы якорь 3 начинает перемещаться вправо (по фиг. 1) и перемещает вправо посредством упора 12 боек 11, который посредством этого же упора отжимает плоскую пружину-фиксатор 16, обеспечивающую фиксацию бойка 11 в крайнем заднем положении. При этом движении якоря 3 захват 8 за счет возникающей силы инерции прижимается к упорам 10; и поэтому не происходит зажима захватом 8 бойка 11. Якорь 3, двигаясь ускоренно вправо, сообщает достаточный запас кинетической энергии бойку 11. Выбрав короткий рабочий воздушный зазор относительно хода бойка 11, якорь 3 . занимает положение магнитного равновесия. При этом упор 7 втулки 6 опирается о держатель инструмента 13, а задний торец этой втулки — о торец захвата 8, поэтому захват 8 не заклинивается в конусной расточке 5 якоря 3. а значит. не зажимает (не заклинивает) боек 11, который, ускоренно перемещаясь вправо за счет сообщенного запаса кинетической энергии, совершает рабочий ход. Рабочий ход бойка 11 закзнчивается ударом по инструменту 13.
В момент удара бойка 11 о инструмент
13 подается импульс тока на обмотку катушки электромагнита 2 обратного хода. Под
1721740
30
40
50
55 действием электромагнитной силы якорь 3 начинает перемещаться влево (по фиг. 1).
При этом, поскольку захват 8 и втулка 6 выполнены иэ немагнитного материала. втулка 6 и захват 8 в начальный момент движения якоря 3 остаются в покое, При дальнейшем движении влево якоря 3 задний конец втулки 6 не касается торца за хвата 8, и поэтому за счет возникающей силы инерции захват 8 заклинивается в. конусной расточке 5 якоря 3. Так как на суживающейся части захвата 8 выполнены пружинящие надсечки 9, то при заклинивании захвата 8 он одновременно эаклинивает боек 11. Теперь якорь 3, двигаясь влево, также перемещает влево. боек 11. Совместное движение влево бойка 11 и якоря 3 продолжается до момента. пока последний не займет положение магнитного равновесия в электромагните 2. Боек 11 к этому моменту имеет определенный запас кинетической энергии, поэтому он расклинивает захват & и продолжает перемещаться влево. При этом боек 11 упором 12 касается упора 7 втулки 6 и,. двигаясь влево, перемещает . втулку 6 влево. Продольное перемещение влево захвата 8 ограничено упорами 10. В конце холостого хода боек 11 затормаживается подпружиненным поршнем 15 амортизатора. При.этом захват 8 кинематически связан с втулкой 6, а втулка 6 и боек 11 кинематически связаны посредством упоров.7 и 12, также боек 11 посредством упора
l2 зафиксирован (кинематически связан) плоской пружиной-фиксатором 16
В конце обратного хода бойка 11 подается импульс тока на обмотку электромагнита 1 прямого хода..Якорь 3 под действием электромагнитной силы начинает перемещаться вправо(фиг. 1) и перемещает вправо втулку 6 и боек 11, а захват 8 упирается при этом движении якоря 3 в упоры 10, Так начинается новый цикл работы двигателя.
Таким образом. в предлагаемом двигателе благодаря снабжению захватом, упорами, выполнению отверстия и конусной расточки в якоре, размещению электромагнита обратного хода соосно с электромагнитом прямого хода. захвата в конусной расточке, втулки и бойка в отверстии якоря; выполнению упоров,на бойке и втулке и пружинящих надсечек; кинематической связи бойка с плоской пружиной-фиксатором
16 повышается эффективность передачи ударной энергии бойка путем резкого снижения сопротивления движения бойка и снижаются потери энергии, что повышает его КПД.
Использование изобретения на практике позволяет сэкономить электроэнергию в
1 — 1 5 раза за счет меньшего хода якоря относительно хода бойка; повысить производительность в 1-1,3 раза за счет увеличения ударной энергии бойка, Формула изобретения
Электродвигатель возвратно-поступательного движения, содержащий статор, выполненный в виде цилиндрического магнитопровода с полюсами, в котором размещена катушка прямого хода, якорь, расположенный в полости магнитопровода. боек с ограничителем хода, выполненным в виде кольцевого выступа, втулку с ограничителем хода, расположенную между якорем и бойком, амортизатор и хвостовик держателя рабочего инструмента. о т л и ч а юшийся тем, что, с целью повышения КПД, он снабжен катушкой обратного хода, захватом, упором для.захвата, плоской пружинойфиксатором бойка, причем магнитопровор выполнен с дополнительным полюсом, размещенным в его средней части, катушка прямого хода размещена между передним и средним, а катушка обратного хода между задним и средним полюсами, в якоре выполнено продольное отверстие с конусной расточкой wa заднем конце, втулка расположена в продольном отверстии якоря и выполнена в виде кольцевой .трубки, немагнитной, с кольцевым упором в передней части, боек расположен в отверстии втулки, пружина-фиксатор закреплена на переднем. а амортизатор на заднем торце статора, захват выполнен из немагнитного материала в виде конуса с осевым отверстием, равным по диаметру внешнему диаметру бойка, углом конусности равным углу расточки заднего конца якоря, снабжен пружинящими надсечками и устайовлен на бойке между якорем и упОром для захвата, закрепленным на заднем конце якоря, причем длина втулки от заднего конца до упора втулки меньше длины якоря не менее чем на величину осевой длины захвата, а длина бойка от заднего конца до упора бойка превышает расстояние от амортизатора до переднего торца упора втулки.
1721740 ю у з àg гд
Фиг/
А-А
У
4c/8. 8
Составитель КДусалиев
Техред М.Моргентал Корректор Э.Лончакова
Редактор О.Стенина
Заказ 960 Тираж Подписное
8НИИПИ Государственного комитете по изобретениям и открытиям при ГКНТ СССР
113035, Москва. Ж-35, Раушскэя наб., 4/5
Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина. 101




www.findpatent.ru









