Двигатель постоянного тока, коллекторный, максимальное напряжение 24В, рабочий ток до 5А.
Что значит — контур тока? Самые распространённые драйверы для управления двигателями это всякие вариации полумостов, которые усиливают напряжение. А мне хочется, чтобы драйвер брал на вход не напряжение, а силу тока. Сила, развиваемая электроприводом, прямо пропорциональна силе протекающего тока. А значит, и прямо пропорциональна ускорению на валу двигателя. Такой контур тока позволит избежать извращений, на которые нужно идти без него, как я это делал тут.
Я разбил этот текст на две статьи:
Вот так выглядит макет управляющего железа: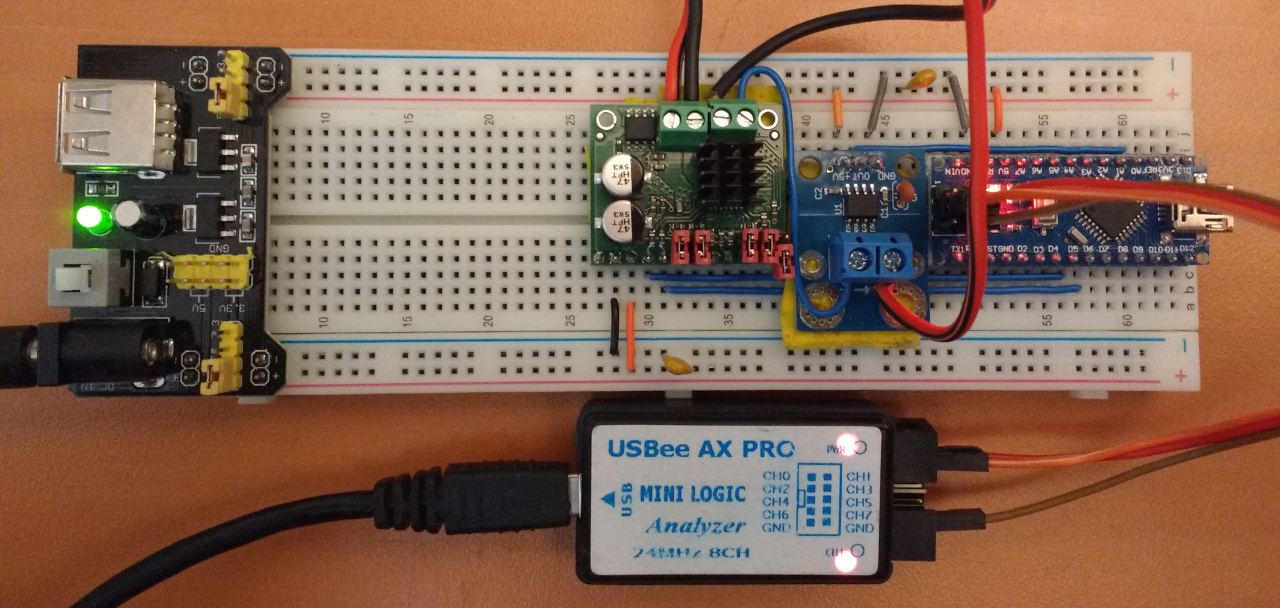
Этот чип был взят за его возможность измерения абсолютной величины протекающего тока, которая в итоге не была использована. Таким образом, можно немного сэкономить, взяв более дешёвый драйвер со схожими характеристиками.
Датчик тока был запитан от 4.96В источника, последовательно с датчиком был подключен резистор, через который было пропущено 2А. Теоретическое напряжение на выходном пине должно быть 4.96/2 + (2 * 0.185 +- 1.5%), измерение показало 2.84 В, что укладывается в расчётные параметры. Затем было поменяно направление течения тока через резистор, при -2А измеренное напряжение на выходном пине датчика составило 2.11В, что опять укладывается в расчётные параметры:
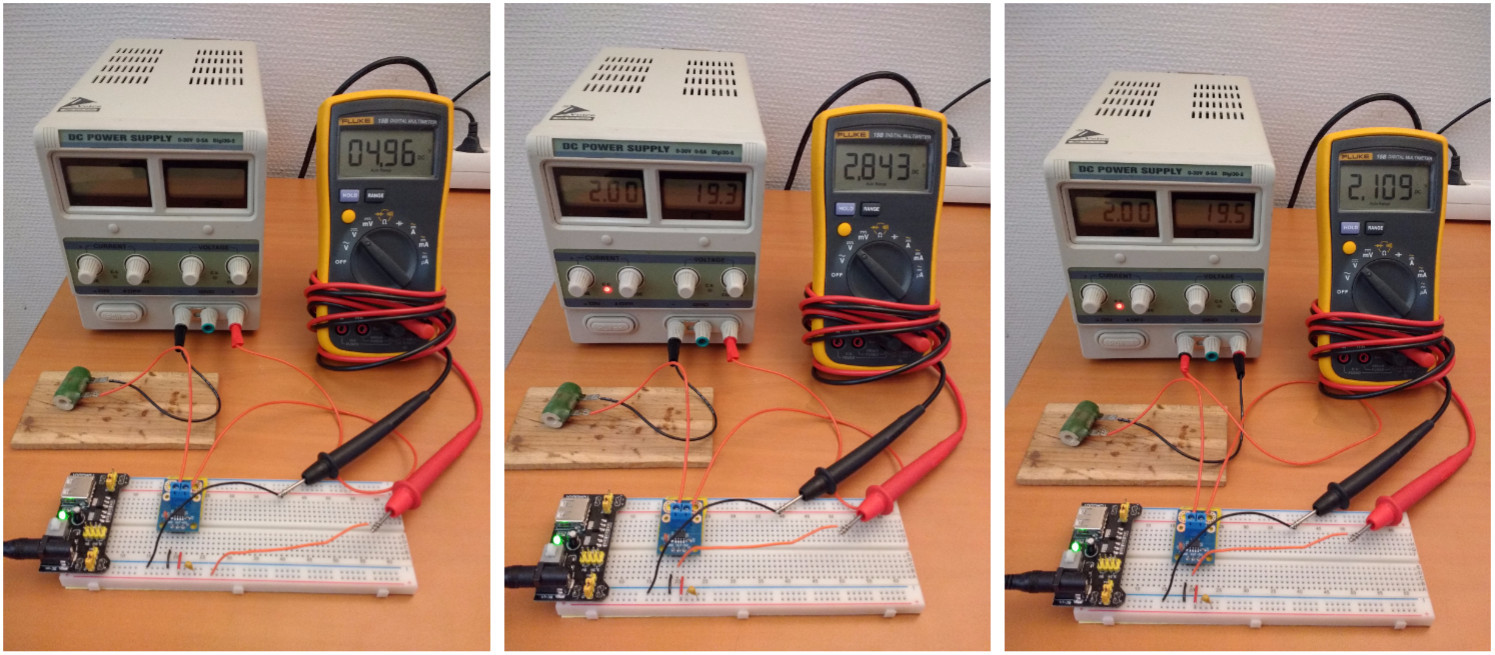
Эта проверка была необходима, т.к. я купил несколько макеток с ACS712 и ACS714 от разных производителей, и в параметры даташита попал только один!
Микроконтроллер генерирует ШИМ сигнал через восьмибитный счётчик с делителем 8, таким образом, частота ШИМ сигнала 16 * 10^6 /255 /8 = 7.8 кГц, что укладывается в максимально доступные для драйвера 20кГц.
Делитель АЦП микроконтроллера установлен на 128; поскольку каждое измерение требует примерно 13 тактов, максимальная частота измерений протекающего тока равна примерно 16 * 10^6 / 128 / 13 = 9.6 кГц. Измерения производятся в фоновом режиме, извещая основную программу об окончании при помощи вызова соответствующего прерывания.
Например, я подал синусоидальный сигнал (в ШИМ) на выход контроллера, и логический анализатор его прекрасно видит:

Всё это было соединено вместе, фотография дана в заголовке поста.
Практически все статьи, что я размещаю здесь, являются моим рабочим дневником. Я чему-то учусь (в данном случае теории управления) и старательно записываю то, что узнал. Лучший способ записать — это написать объяснение того, как это всё работает. Затем статьи выкладываю на разных площадках, например тут.Целей при написании текста у меня две:
а) получить обратную связь от людей, которые знают больше меня. Например, практически всё, что я узнал для данных двух статей, мне рассказал уважаемый Arastas, прошу любить и жаловать: человек, который тратит личное время на обучение таких оболтусов, как я.
Опять же, gbg, который написал мне линейную алгебру для моих лекций по компьютерной графике, а потом за много тысяч километров по телефону дебажил мне электронику.
б) просто записать: таким образом я получаю библиотеку личного опыта, к которой периодически возвращаюсь. Кстати, тематические медиа, какой процент авторов соглашаются на ваши условия программы поддержки?
На эту тему хорошо высказался Валерий Иванович Опойцев (Босс):
В любой области полезно оказаться в подходящей среде устного общения, где осыпается книжная шелуха. Там иногда ничего не меняется по сути, зато возникает чувство попадания в колею и освобождения от догм. Для науки, которая всегда в маске, это особенно важно. Суть за кадром, перед глазами — кружева. И вечно чего-то не хватает. То простоты, то сложности, да точно и не определишь — чего. Что-то куда-то шагает, ты — на обочине, а время уходит в песок, не говоря о жизни.Далее предпринимается попытка сдвинуть ситуацию с места, моделируя письменную среду, где «спадают покровы». Внешняя канва содержания более-менее неясна из оглавления, но главная цель — та, что за кадром. Снять вуаль, грим, убрать декорации. Переупростить, даже приврать слегка, ибо дозирование правды — краеугольный камень объяснения. Результаты, перегруженные деталями, не пролезают куда надо. Озарение случается, когда пухнущая голова проваливается на уровень «дважды два», в то время как счет идет на миллионы. Такая уж тут диалектика.
Если у нас есть вектор (7,12,18,-2), то его можно рассматривать как набор коэффициентов во взвешенной сумме. 7*(1,0,0,0) + 12*(0,1,0,0) + 18*(0,0,1,0) + (-2)*(0,0,0,1). Ровно так же можно считать этот вектор значениями функции в точках 0, 1, 2, 3, ведь наши векторы (0,1,0,0) и ему подобные можно рассматривать как сдвиг единичного импульса: Если постоянно увеличивать количество векторов (сдвинутых единичных импуьсов) в базисе, то получим обычные функции.
Если постоянно увеличивать количество векторов (сдвинутых единичных импуьсов) в базисе, то получим обычные функции.К сожалению, с таким базисом бывает довольно неудобно работать. Давайте рассмотрим следующую функцию в качестве примера:
 Мы уже беседовали о том, что такое преобразование Фурье. Если кратко, то это смена базиса.
Мы уже беседовали о том, что такое преобразование Фурье. Если кратко, то это смена базиса. В нашем случае преобразование Фурье — это функция из вещественных чисел в комплексные:
 Аргумент функции (вещественное число) — это просто номер базисной функции или вектора (на самом деле, пары базисных функций), а её значение — это соответствующая (пара) координат в для этих двух векторов в базисе. Базис Фурье — это синусы и косинусы различных частот. Частота и является номером базисной функции.
Аргумент функции (вещественное число) — это просто номер базисной функции или вектора (на самом деле, пары базисных функций), а её значение — это соответствующая (пара) координат в для этих двух векторов в базисе. Базис Фурье — это синусы и косинусы различных частот. Частота и является номером базисной функции.Для нашей конкретной функции f(t), которая уже являетя взвешенной суммой синуса и косинуса, очень легко посчитать её разложение в базис Фурье:
 То есть, наша функция f(t) имеет нулевые координаты для всех векторов базиса, кроме векторов номер 11 и 41.
То есть, наша функция f(t) имеет нулевые координаты для всех векторов базиса, кроме векторов номер 11 и 41.Чем полезен базис Фурье? Например тем, что операция дифференцирования линейно преобразует этот базис. Допустим, мы хотим посчитать преобразование Фурье от производной f'(t). Как это сделать? Как вариант, в лоб: сначала посчитать производную, а затем посчитать преобразование Фурье:
 Очевидно, что при дифференцировании sin(x) он станет sin(x+90°), то есть крайне легко найти соответствие разложение в базис Фурье исходной функции и её производной:
Очевидно, что при дифференцировании sin(x) он станет sin(x+90°), то есть крайне легко найти соответствие разложение в базис Фурье исходной функции и её производной: Умножение на i — это просто поворот комплексной плоскости, который соответствует +90° в аргументе нашей функции. То есть, операция дифференцирования, которую сложно делать в базисе единичных импульсов, в базисе Фурье — это просто масштабирование и поворот на 90 градусов. Красиво, правда?
Умножение на i — это просто поворот комплексной плоскости, который соответствует +90° в аргументе нашей функции. То есть, операция дифференцирования, которую сложно делать в базисе единичных импульсов, в базисе Фурье — это просто масштабирование и поворот на 90 градусов. Красиво, правда?Не будем вдаваться в подробности того, как выводятся эти свойства (лучше рассмотрите внимательно свойства базиса Фурье, он проще), давайте просто отметим следующие факты:
1. Преобразование Лапласа линейно:
 2. Преобразование Лапласа производной — это аффинное действие над преобразованием самой функции: 3.
2. Преобразование Лапласа производной — это аффинное действие над преобразованием самой функции: 3.  Итак, если у нас есть двигатель постоянного тока, то протекающий ток I(t) и напряжение на клеммах U(t) связаны следующим дифференциальным уравнением, где w(t) — это скорость вращения вала двигателя:
Итак, если у нас есть двигатель постоянного тока, то протекающий ток I(t) и напряжение на клеммах U(t) связаны следующим дифференциальным уравнением, где w(t) — это скорость вращения вала двигателя: Здесь L — это индуктивность, а R — сопротивление, которые мы и ищем. Я не буду повторять, откуда вылезает этот диффур, так как уже подробно и на пальцах его расписывал (см. «уравнения Максвелла на пальцах»).
Здесь L — это индуктивность, а R — сопротивление, которые мы и ищем. Я не буду повторять, откуда вылезает этот диффур, так как уже подробно и на пальцах его расписывал (см. «уравнения Максвелла на пальцах»).Поскольку наша задача найти L и R, давайте жёстко зафиксируем вал двигателя, таким образом заставив w(t) быть нулевой:
 По совету Arastas я подал два типа сигналов на мой двигатель: меандр и синусоиду. Затем я измерил протекающий ток, картинка получается примерно следующая:
По совету Arastas я подал два типа сигналов на мой двигатель: меандр и синусоиду. Затем я измерил протекающий ток, картинка получается примерно следующая:

Здесь синие кривые — это входное напряжение, котороя я контролирую, а зелёные — это измерения силы тока, полученные при помощи ACS714.
Мой микроконтроллерный код, который генерирует 11 экспериментов с меандром и синусоидами различных амплитуд и частот, можно посмотреть здесь.
Давайте решим наше дифференциальное уравнение для обоих типов сигнала напряжения, получим параметрический выходной сигнал силы тока, и подберём параметры, чтобы теоретическая кривая как можно лучше аппроксимировала реальные измерения.
Давайте возьмём преобразование Лапласа от левой и правой частей дифференциального уравнения (1):
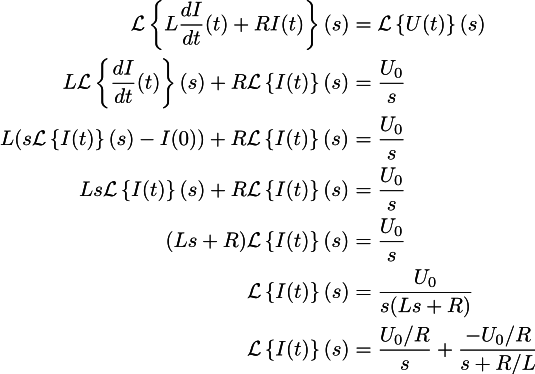 Для получения второй строчки я использовал линейность преобразования Лапласа, U0/s — взял из таблицы (обычно преобразования Лапласа вручную не считают, пользуются таблицами).
Для получения второй строчки я использовал линейность преобразования Лапласа, U0/s — взял из таблицы (обычно преобразования Лапласа вручную не считают, пользуются таблицами).Для получения третьей строки использовано свойство производной.
Последняя строчка получается из предпоследней использованием метода неопределённых декомпозиций. Смысл этого перехода в том, чтобы опять получить табличную функцию. Разумеется, в двадцать первом веке руками это считать ни к чему.
Теперь осталось применить обратное преобразование Лапласа (для правой части мы смотрим таблицу) и мы решили наш диффур. Переход в базис Лапласа превратил дифференциальное уравнение в обычное алгебраическое!
 Быстрая проверка результата: по истечении нескольких миллисекунд индуктивность уже не будет играть роли, и мы получим протекающий ток U_0 / R (закон Ома). В самом же начале протекающий ток равен нулю и экспоненциально возрастает, причём скорость возрастания напрямую зависит от индуктивности. Sanity check passed.
Быстрая проверка результата: по истечении нескольких миллисекунд индуктивность уже не будет играть роли, и мы получим протекающий ток U_0 / R (закон Ома). В самом же начале протекающий ток равен нулю и экспоненциально возрастает, причём скорость возрастания напрямую зависит от индуктивности. Sanity check passed.Файл с измерениями лежит здесь. Три колонки, секунды, приложенное напряжение (в вольтах), измеренная сила тока (в амперах).
Вот код, который подбирает параметры сопротивления и индуктивности для этого эксперимента:
Скрытый текстimport numpy as np from scipy.optimize import curve_fit import matplotlib.pyplot as plt U0 = 19.2 def unit_step_current(x, R, L): return [U0/R - U0/R*np.exp(-t*R/L) for t in x] data = np.genfromtxt('unit_step_19.2V.csv', delimiter=',', names=['t', 'V', 'A']) [R, L] = curve_fit(unit_step_current, data['t'], data['A'])[0] print(R, L) fig = plt.figure() ax1 = fig.add_subplot(1,1,1) ax1.set_title("Resistance/inductance fitting") ax1.set_xlabel('Time, seconds') ax1.set_ylabel('Current (A), tension (V)') ax1.plot(data['t'], data['V'], color='b', label='input tension') ax1.plot(data['t'], data['A'], color='g', label='measured current') model=unit_step_current(data['t'], R, L) ax1.plot(data['t'], model, color='r', label='fitted curve') ax1.legend() plt.show() Он говорит, что хорошо подходит пара R=4.4 Ома, L=6мГенри, вот график: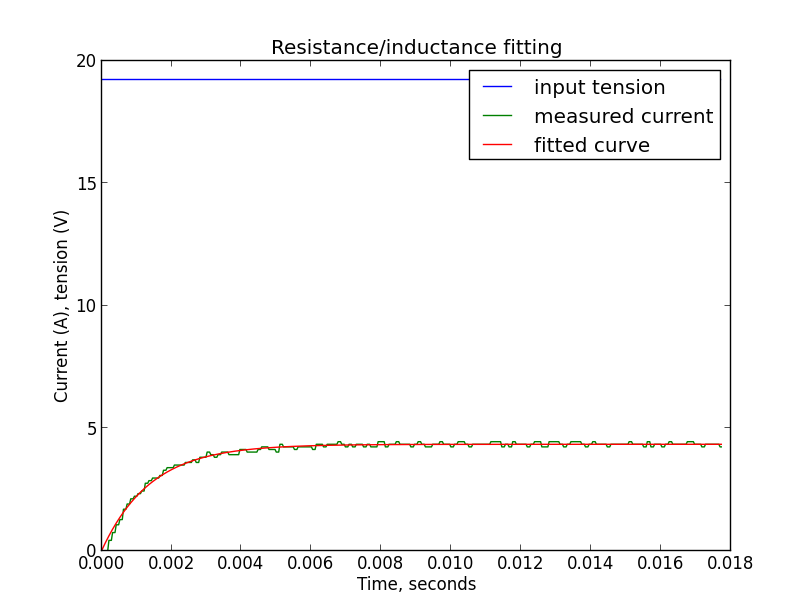
 а потом и к левой:
а потом и к левой: Теперь обратное преобразование нам даст следующий закон протекания тока:
Теперь обратное преобразование нам даст следующий закон протекания тока: Опять быстрый sanity check: нулевой ток в самом начале, несколько миллисекунд переходных процессов (экспонента, напрямую зависящая от индуктивности). По истечению некоторого времени протекающий ток — это взвешенная сумма синуса и косинуса одной и той же частоты (частота равна входной, это хорошо). Эта сумма даёт синусоиду, чуть сдвинутую во времени. Отлично, результат правдоподобен.
Опять быстрый sanity check: нулевой ток в самом начале, несколько миллисекунд переходных процессов (экспонента, напрямую зависящая от индуктивности). По истечению некоторого времени протекающий ток — это взвешенная сумма синуса и косинуса одной и той же частоты (частота равна входной, это хорошо). Эта сумма даёт синусоиду, чуть сдвинутую во времени. Отлично, результат правдоподобен.Измерения лежат здесь, а код подбора параметров тут. Он даёт примерно такие же значения сопротивления и индуктивности, что нам и требовалось. Вот график: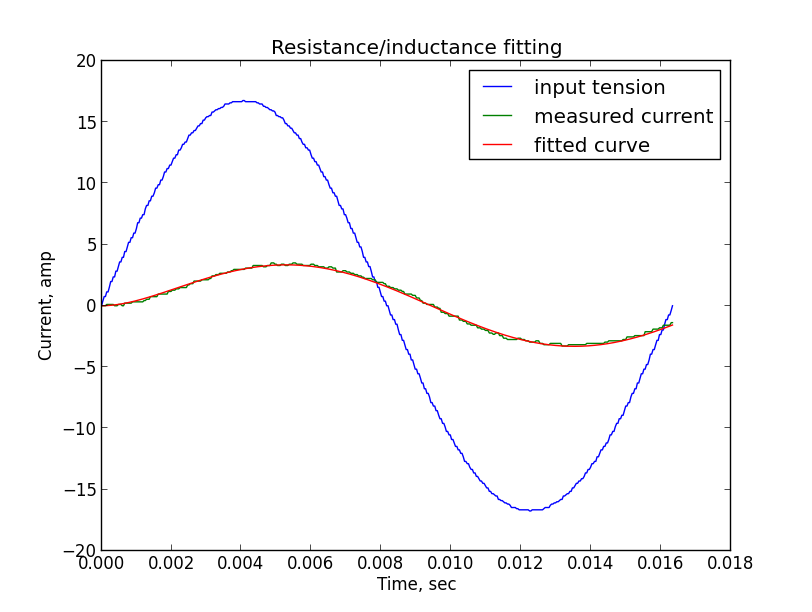
Далее, параметры, найденные при высокой амплитуде сигнала, не совсем совпадают с тем, что получается при низких напряжениях. Может быть интересно (тут не рассмотрено) делать модель не только двигателя, а всей системы в целом, включая нелинейность ШИМ-драйвера.
Ну а дальше осталось разработать регулятор, который будет на вход брать необходимую силу тока. Оставайтесь на связи!
habr.com
Изобретение относится к области электротехники и может быть использовано в системах электромеханического преобразования энергии. Сущность изобретения: предложенный индукционный асинхронный мотор содержит первый элемент 1, создающий магнитное поле, и второй элемент 2 с токопроводящими стержнями 3, все концы которых с одной торцевой стороны магнитного пакета второго элемента 2 соединены между собой, а с другой торцевой стороны магнитного пакета второго элемента 2 концы стержней 3 соединены с образованием электрически независимых контуров для обеспечения условия эффективного образования электромагнитного момента. Во втором варианте выполнения мотора концы стержней 3 на обеих торцевых сторонах пакета второго элемента 2 могут быть соединены одинаково для получения вышеупомянутого положительного эффекта. Мотор также может быть выполнен в, по меньшей мере, двухроторном исполнении. Технический результат от использования данного изобретения состоит в максимальном улучшении условий действия мгновенных электродвижущих сил всех стержней второго элемента (ротора), уменьшении продольной составляющей "реакции якоря" ротора и в обеспечении более благоприятных условий для образования электромагнитного момента векторами результирующих магнитных полей статора и ротора. 3 з.п. ф-лы, 5 ил.
Изобретение относится к электроэнергетике и может быть использовано в системах электромеханического преобразования энергии.
В системах электромеханического преобразования энергии сегодня широкое применение с постоянно увеличивающимся темпом использования имеют индукционные асинхронные моторы (асинхронные двигатели). Все используемые и известные из научно-технической литературы многочисленные конструкции асинхронных моторов, имеющих классический ротор типа "беличья клетка", выполненные даже по современным методам проектирования, технологии изготовления и с использованием современных материалов, обладают принципиальными недостатками. Причем улучшение одного или нескольких недостатков (показателей) приводит к ухудшению других показателей и, таким образом, удельные технико-экономические показатели асинхронных моторов остаются низкими. Эти недостатки обусловлены классической конструкцией ротора асинхронного мотора. Из изученных аналогов поэтому наиболее близким техническим решением задачи (прототипом) является классический индукционный асинхронный мотор, имеющий первый элемент (статор), создающий магнитное поле, и второй элемент (ротор) с обмоткой типа "беличья клетка", состоящий из симметрично расположенных по периметру магнитного пакета и параллельно оси вращения токопроводящих стержней, находящихся в сквозных пазах магнитного пакета второго элемента на одинаковом удалении в радиальном направлении от оси вращения мотора, при этом на каждой торцевой стороне магнитного пакета второго элемента концы всех стержней соединены между собой короткозамыкающим кольцом (патент Германии 51083 от 31.08.1889). Недостатками прототипа являются низкие технические, энергетические, эксплуатационные и удельные технико-экономические показатели, как например, малые значения коэффициента полезного действия и коэффициента мощности, большой пусковой ток, большой ток холостого хода, малый пусковой момент, малая перегрузочная способность по моменту, мягкая механическая характеристика даже в области рабочих скоростей и большое номинальное скольжение, большой ток и одновременно малый тормозной момент в режиме противовключения, чрезмерное возрастание скорости и тока в режиме рекуперации, необходимый большой постоянный ток и одновременно малый тормозной момент в режиме динамического торможения, большая емкость конденсаторов и одновременно малый тормозной момент в режиме торможения с самовозбуждением. Все указанные недостатки являются следствием сильного изменения результирующего магнитного поля мотора и уменьшения модуля векторного произведения векторов магнитных полей статора и ротора из-за сильного влияния продольной составляющей "реакции якоря" ротора, а также малые степени эффективности образования результирующего электромагнитного момента токопроводящими стержнями, имеющими в данный момент времени электродвижущие силы меньше, чем электродвижущие силы стержней, находящихся на оси магнитного поля статора, из-за блокировки максимальной электродвижущей силой малых электродвижущих сил. В основу изобретения положена задача максимального улучшения условий действия мгновенных электродвижущих сил всех стержней второго элемента (ротора), уменьшения продольной составляющей "реакции якоря" ротора и обеспечения более благоприятных условий для образования электромагнитного момента векторами результирующих магнитных полей статора и ротора. Поставленная задача решается тем, что в индукционном асинхронном моторе, имеющем первый элемент, создавший магнитное поле, и второй элемент, содержащий токопроводящие стержни, расположенные симметрично по периметру в пазах магнитного пакета и параллельно оси вращения мотора, согласно изобретению количество стержней кратно числу полюсов магнитного поля первого элемента, концы всех стержней на одной торцевой стороне магнитного пакета второго элемента соединены между собой, а на противоположной торцевой стороне магнитного пакета, второго элемента конец каждого стержня соединен со всеми теми концами стержней, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление. Кроме того, в моторе с каждой торцевой стороны магнитного пакета второго элемента конец каждого стержня может быть соединен со всеми теми концами стержней, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление. Мотор также может содержать по меньшей мере два магнитных пакета второго элемента, расположенных на одном валу, при этом соединения концов стержней на торцевых сторонах каждого магнитного пакета второго элемента электрически изолированы от соединений концов стержней на торцевых сторонах других магнитных пакетов второго элемента. Преимущества заявленного мотора в том, что при вышеупомянутом в основном варианте выполнения соединений концов стержней на торцевых сторонах магнитного пакета второго элемента и при количестве стержней, кратном числу полюсов магнитного поля первого элемента, образуются несколько электрически взаимонезависимых модулей типа "беличья клетка", у которых количество стержней равно числу полюсов магнитного поля первого элемента, при этом стержни, входящие в данный модуль, в любой момент времени имеют одинаковые по величине электродвижущие силы, из-за чего создаются условия для максимально эффективного действия электродвижущих сил всех стержней одновременно, т.е. полностью исключается вышеупомянутый эффект блокировки, имеющий место в классическом роторе типа "беличья клетка", где всегда закороченные с обеих торцевых сторон магнитного пакета все стержни имеют разные электродвижущие силы из-за разных потокосцеплений. Вариант конструктивного выполнения мотора, в котором с каждой торцевой стороны магнитного пакета второго элемента конец каждого стержня может быть соединен со всеми теми концами стержней, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление (т.е. вариант с одинаковым соединением концов стержней на торцевых сторонах магнитного пакета второго элемента), имеет преимущество в технологии изготовления, особенно в случаях, когда обмотка второго элемента (ротора) выполнена не литьем. Вариант конструктивного выполнения мотора, в котором он содержит по меньшей мере два магнитных пакета второго элемента, расположенных на одном валу, при этом соединения концов стержней на торцевых сторонах каждого магнитного пакета второго элемента электрически изолированы от соединений концов стержней на торцевых сторонах других магнитных пакетов второго элемента, имеет следующие преимущества: дополнительное повышение эффективности и улучшение механических параметров конструкции второго элемента с точки зрения статической и динамической балансировки. На фиг.1 изображен заявленный мотор, вид с одной торцевой стороны; на фиг.2 - заявленный мотор, вид с противоположной торцевой стороны; на фиг.3 - заявленный мотор, вид сбоку; на фиг. 4 - вариант выполнения заявленного мотора с одинаковым соединением концов стержней на обеих торцевых сторонах магнитного пакета второго элемента, вид сбоку; на фиг.5 - вариант выполнения заявленного мотора в двухроторном исполнении, вид сбоку. Индукционный асинхронный мотор имеет первый элемент, создающий магнитное поле, и второй элемент, содержащий токопроводящие стержни, расположенные симметрично по периметру магнитного пакета в пазах и параллельно оси вращения мотора, при этом количество стержней кратно числу полюсов магнитного поля первого элемента, концы всех стержней на одной торцевой стороне магнитного пакета второго элемента соединены между собой, а конец каждого стержня на противоположной торцевой стороне магнитного пакета второго элемента соединен со всеми теми концами стержней, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление. В моторе, кроме того, с каждой торцевой стороны магнитного пакета второго элемента конец каждого стержня может быть соединен со всеми теми концами стержней, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление. Мотор также может содержать по меньшей мере два магнитных пакета второго элемента, установленных на одном валу, при этом соединения концов стержней на торцевых сторонах каждого пакета второго элемента электрически изолированы от соединений концов стержней на торцевых сторонах других пакетов второго элемента. В одном из конкретных конструктивных выполнении рассмотрим четырехполюсный мотор (фиг.1-3). Он содержит первый элемент - статор 1, создающий магнитное поле, и второй элемент - ротор 2. Ротор 2 содержит токопроводящие стержни 3 (в рассматриваемом четырехполюсном моторе имеются двенадцать стержней), расположенные симметрично по периметру магнитного пакета и параллельно оси вращения мотора в сквозных пазах магнитного пакета на одинаковом удалении в радиальном направлении от оси вращения ротора 2 в количестве, кратном числу полюсов магнитного поля статора 1. С одной торцевой стороны ротора 2 концы всех стержней 3 соединены между собой известным короткозамыкающим кольцом 4 (фиг.1). С противоположной торцевой стороны ротора 2 конец каждого стержня соединен со всеми теми концами стержней 3, которые сдвинуты относительно упомянутого конца по периметру магнитного пакета ротора 2 на одно полюсное деление, посредством проводников 5, 6, 7 соответственно (фиг.2). Таким образом, образуются три (в рассматриваемом четырехполюсном моторе) одинаковых электрически изолированных контура, состоящие из проводников 5, 6, 7 соответственно (на фиг. 2 эти три контура изображены соответственно сплошной, штриховой и штрихпунктирной линиями). Каждый такой контур представляет собой одно короткозамыкающее кольцо "беличьей клетки". Количество таких контуров составляет n=Z/2P, где Z - количество всех стержней (пазов) ротора. 2Р - число полюсов магнитного поля статора мотора. Система стержней 3, закороченная соответствующим контуром, например, контуром 5 (или контуром 6, или контуром 7) на торцевой стороне магнитного пакета ротора 2, образуют короткозамкнутый модуль - элементарную "беличью клетку". Таким образом, заявленный мотор имеет n электрически взаимонезависимые, содержащие стержни 3 в количестве 2Р штук, модули, причем каждый последующий модуль сдвинут по периметру пакета ротора 2 относительно предыдущего модуля на угол 2 /Z (в рассматриваемом четырехполюсном моторе имеются три модуля по четыре стержня 3 в каждом, всего двенадцать стержней 3). Заявленный мотор работает следующим образом. Статор 1 создает вращающееся магнитное поле, которое индуктирует электродвижущие силы в стержнях 3 ротора 2, вследствие чего в стержнях 3 возникают токи. В результате электромагнитного взаимодействия магнитного поля статора 1 с токами стержней 3 образуется электромагнитный момент, под действием которого вращается ротор 2. При этом все стержни 3 каждого модуля "беличьей клетки" в любой момент времени имеют равные по величине электродвижущие силы, действующие с максимальной возможностью, что кардинально улучшает продуктивность образования электромагнитного момента. (В то время как в классическом асинхронном моторе с одной единственной "беличьей клеткой" все стержни, находящиеся под данным полюсом магнитного поля статора, в любой момент времени имеют разные по величине потокосцепления и поэтому индуктированные в них электродвижущие силы имеют одинаковое направление, но они отличны по величине. Следовательно, электродвижущая сила стержня, расположенного на магнитной оси полюса, имеет максимальное значение и блокирует действия электродвижущих сил всех других стержней, меньших по величине. Тем самым ухудшаются условия образования полезного момента токами от этих меньших по величине электродвижущих сил, что в итоге приводит к ухудшению продуктивности образования элементарных электромагнитных моментов от каждого стержня и к резкому уменьшению результирующего элетромагнитного момента мотора). Распределенная по периметру ротора 2 система модулей "беличьей клетки" в магнитном отношении максимально возможно сбалансирована, т.е. минимизирована продольная составляющая "реакции якоря" ротора. 2 и векторы результирующих магнитных полей статора 1 и ротора 2 находятся в пространстве в наиблагоприятном взаимоположении в смысле образования максимального электромагнитного момента. Все это приводит к увеличению коэффициента мощности, уменьшению потребляемого от сети реактивного тока, обеспечивая увеличение номинальной мощности мотора, уменьшение пускового тока и возрастание пускового момента мотора. Во втором варианте конструктивного выполнения заявленного мотора рассмотрим также четырехполосный мотор (фиг.4). Он содержит первый элемент - статор 1, создающий магнитное поле, и второй элемент - ротор 8 с токопроводящими стержнями 3, расположенными симметрично по периметру магнитного пакета и параллельно оси вращения мотора в сквозных пазах магнитного пакета на одинаковом удалении в радиальном направлении от оси вращения ротора 8 в количестве, кратном числу полюсов магнитного поля статора 1. На каждой торцевой стороне пакета ротора 8 конец каждого стержня 3 соединен со всеми теми концами стержней 3, которые сдвинуты относительно упомянутого конца по периметру пакета ротора 8 на одно полюсное деление, посредством проводников 5, 6, 7 соответственно на одной торцевой стороне (см. фиг.2) и проводников 9, 10, 11 соответственно на противоположной торцевой стороне (соединение концов стержней выполнено аналогично соединению, изображенному на фиг.2). Таким образом, образуются три пары (в рассматриваемом четырехполюсном моторе) одинаковых электрически взаимонезависимых контуров, состоящих из проводников 5 и 9, 6 и 10, 7 и 11 соответственно. Каждая такая пара контуров представляет собой два короткозамыкающих кольца "беличьей клетки". Количество таких пар контуров составляет n=Z/2P (как и в вышеописанном основном конструктивном варианте). Система стержней 3, закороченная с обеих торцевых сторон пакета ротора 8 парой контуров, например парой контуров 5 и 9 (или парой контуров 6 и 10, или парой контуров 7 и 11), образует короткозамкнутый модуль - элементарную "беличью клетку". Таким образом, заявленный мотор во втором варианте выполнения имеет n электрически взаимонезависимые, содержащие стержни 3 в количестве 2Р штук, модули, причем каждый последующий модуль сдвинут по периметру пакета ротора 8 относительно предыдущего модуля на угол 2/Z (в рассматриваемом четырехполюсном моторе имеется три модуля по четыре стержня 3 в каждом, всего двенадцать стержней(. Такое конструктивное выполнение ротора 8 обеспечивает улучшение технологии изготовления, особенно в случаях, когда обмотка ротора выполнена не литьем. Второй вариант конструктивного выполнения заявленного мотора работает аналогично вышеописанному основному варианту исполнения. В варианте по меньшей мере двухроторного исполнения также рассмотрим четырехполюсный мотор (фиг.5). Он содержит первый элемент - общий статор 12, создающий магнитное поле, и второй элемент в виде вращающейся части из двух одинаковых роторов, установленных на одном валу и выполненных конструктивно аналогично ротору 2 (или ротору 8), описанному выше. При этом роторы 2 установлены так, что кольца 4 каждого ротора 2 расположены друг против друга, и системы стержней 3 одного ротора 2 повернуты (геометрически сдвинуты) относительно системы стержней 3 второго ротора 2 по оси вращения мотора на угол /Z, равный половине угла между соседними стержнями роторов 2. Такое расположение приводит к уменьшению пульсаций результирующего магнитного потока и электромагнитного момента мотора, а также к повышению степени геометрического и механического симметрирования вращающейся части мотора. Вариант двухроторного исполнения заявленного мотора работает аналогично основному варианту исполнения, описанному выше. При этом дополнительно повышается эффективность и улучшаются механические параметры конструкции вращающейся части мотора с точки зрения ее механической статической и динамической балансировки. Заявленный индукционный асинхронный мотор имеет одновременно высокие технические, энергетические, эксплуатационные и удельные технико-экономические показатели: большие значения коэффициента полезного действия и коэффициента мощности, малый пусковой ток, малый ток холостого хода, большой пусковой момент, большую перегрузочную способность по моменту, жесткую механическую характеристику в области рабочих скоростей и малое номинальное скольжение, малый ток и одновременно большой тормозной момент в режиме противовключения, ограниченное возрастание скорости и тока в режиме рекуперации, необходимый малый постоянный ток и одновременно большой тормозной момент в режиме динамического торможения, малую емкость конденсаторов и одновременно большой тормозной момент в режиме торможения с самовозбуждением, - по сравнению с известным асинхронным мотором с классическим ротором типа "беличья клетка" (прототипом). Вышеуказанный положительный эффект получен в результате экспериментов, проведенных заявителем на асинхронных моторах типа AIC 90 S 2 T 2 со стандартным ротором типа "беличья клетка" и роторами, выполненными согласно изобретению (в основном варианте выполнения).
/Z (в рассматриваемом четырехполюсном моторе имеются три модуля по четыре стержня 3 в каждом, всего двенадцать стержней 3). Заявленный мотор работает следующим образом. Статор 1 создает вращающееся магнитное поле, которое индуктирует электродвижущие силы в стержнях 3 ротора 2, вследствие чего в стержнях 3 возникают токи. В результате электромагнитного взаимодействия магнитного поля статора 1 с токами стержней 3 образуется электромагнитный момент, под действием которого вращается ротор 2. При этом все стержни 3 каждого модуля "беличьей клетки" в любой момент времени имеют равные по величине электродвижущие силы, действующие с максимальной возможностью, что кардинально улучшает продуктивность образования электромагнитного момента. (В то время как в классическом асинхронном моторе с одной единственной "беличьей клеткой" все стержни, находящиеся под данным полюсом магнитного поля статора, в любой момент времени имеют разные по величине потокосцепления и поэтому индуктированные в них электродвижущие силы имеют одинаковое направление, но они отличны по величине. Следовательно, электродвижущая сила стержня, расположенного на магнитной оси полюса, имеет максимальное значение и блокирует действия электродвижущих сил всех других стержней, меньших по величине. Тем самым ухудшаются условия образования полезного момента токами от этих меньших по величине электродвижущих сил, что в итоге приводит к ухудшению продуктивности образования элементарных электромагнитных моментов от каждого стержня и к резкому уменьшению результирующего элетромагнитного момента мотора). Распределенная по периметру ротора 2 система модулей "беличьей клетки" в магнитном отношении максимально возможно сбалансирована, т.е. минимизирована продольная составляющая "реакции якоря" ротора. 2 и векторы результирующих магнитных полей статора 1 и ротора 2 находятся в пространстве в наиблагоприятном взаимоположении в смысле образования максимального электромагнитного момента. Все это приводит к увеличению коэффициента мощности, уменьшению потребляемого от сети реактивного тока, обеспечивая увеличение номинальной мощности мотора, уменьшение пускового тока и возрастание пускового момента мотора. Во втором варианте конструктивного выполнения заявленного мотора рассмотрим также четырехполосный мотор (фиг.4). Он содержит первый элемент - статор 1, создающий магнитное поле, и второй элемент - ротор 8 с токопроводящими стержнями 3, расположенными симметрично по периметру магнитного пакета и параллельно оси вращения мотора в сквозных пазах магнитного пакета на одинаковом удалении в радиальном направлении от оси вращения ротора 8 в количестве, кратном числу полюсов магнитного поля статора 1. На каждой торцевой стороне пакета ротора 8 конец каждого стержня 3 соединен со всеми теми концами стержней 3, которые сдвинуты относительно упомянутого конца по периметру пакета ротора 8 на одно полюсное деление, посредством проводников 5, 6, 7 соответственно на одной торцевой стороне (см. фиг.2) и проводников 9, 10, 11 соответственно на противоположной торцевой стороне (соединение концов стержней выполнено аналогично соединению, изображенному на фиг.2). Таким образом, образуются три пары (в рассматриваемом четырехполюсном моторе) одинаковых электрически взаимонезависимых контуров, состоящих из проводников 5 и 9, 6 и 10, 7 и 11 соответственно. Каждая такая пара контуров представляет собой два короткозамыкающих кольца "беличьей клетки". Количество таких пар контуров составляет n=Z/2P (как и в вышеописанном основном конструктивном варианте). Система стержней 3, закороченная с обеих торцевых сторон пакета ротора 8 парой контуров, например парой контуров 5 и 9 (или парой контуров 6 и 10, или парой контуров 7 и 11), образует короткозамкнутый модуль - элементарную "беличью клетку". Таким образом, заявленный мотор во втором варианте выполнения имеет n электрически взаимонезависимые, содержащие стержни 3 в количестве 2Р штук, модули, причем каждый последующий модуль сдвинут по периметру пакета ротора 8 относительно предыдущего модуля на угол 2/Z (в рассматриваемом четырехполюсном моторе имеется три модуля по четыре стержня 3 в каждом, всего двенадцать стержней(. Такое конструктивное выполнение ротора 8 обеспечивает улучшение технологии изготовления, особенно в случаях, когда обмотка ротора выполнена не литьем. Второй вариант конструктивного выполнения заявленного мотора работает аналогично вышеописанному основному варианту исполнения. В варианте по меньшей мере двухроторного исполнения также рассмотрим четырехполюсный мотор (фиг.5). Он содержит первый элемент - общий статор 12, создающий магнитное поле, и второй элемент в виде вращающейся части из двух одинаковых роторов, установленных на одном валу и выполненных конструктивно аналогично ротору 2 (или ротору 8), описанному выше. При этом роторы 2 установлены так, что кольца 4 каждого ротора 2 расположены друг против друга, и системы стержней 3 одного ротора 2 повернуты (геометрически сдвинуты) относительно системы стержней 3 второго ротора 2 по оси вращения мотора на угол /Z, равный половине угла между соседними стержнями роторов 2. Такое расположение приводит к уменьшению пульсаций результирующего магнитного потока и электромагнитного момента мотора, а также к повышению степени геометрического и механического симметрирования вращающейся части мотора. Вариант двухроторного исполнения заявленного мотора работает аналогично основному варианту исполнения, описанному выше. При этом дополнительно повышается эффективность и улучшаются механические параметры конструкции вращающейся части мотора с точки зрения ее механической статической и динамической балансировки. Заявленный индукционный асинхронный мотор имеет одновременно высокие технические, энергетические, эксплуатационные и удельные технико-экономические показатели: большие значения коэффициента полезного действия и коэффициента мощности, малый пусковой ток, малый ток холостого хода, большой пусковой момент, большую перегрузочную способность по моменту, жесткую механическую характеристику в области рабочих скоростей и малое номинальное скольжение, малый ток и одновременно большой тормозной момент в режиме противовключения, ограниченное возрастание скорости и тока в режиме рекуперации, необходимый малый постоянный ток и одновременно большой тормозной момент в режиме динамического торможения, малую емкость конденсаторов и одновременно большой тормозной момент в режиме торможения с самовозбуждением, - по сравнению с известным асинхронным мотором с классическим ротором типа "беличья клетка" (прототипом). Вышеуказанный положительный эффект получен в результате экспериментов, проведенных заявителем на асинхронных моторах типа AIC 90 S 2 T 2 со стандартным ротором типа "беличья клетка" и роторами, выполненными согласно изобретению (в основном варианте выполнения).Формула изобретения
1. Индукционный асинхронный мотор, имеющий первый элемент (1), создающий магнитное поле, и второй элемент (2), содержащий токопроводящие стержни (3), расположенные симметрично по периметру в пазах магнитного пакета и параллельно оси вращения мотора, отличающийся тем, что количество стержней (3) кратно числу полюсов магнитного поля первого элемента (1), на одной торцевой стороне магнитного пакета второго элемента (2) концы всех стержней (3) соединены между собой, а на противоположной торцевой стороне магнитного пакета второго элемента (2) конец каждого стержня (3) соединен со всеми теми концами стержней (3), которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента (2) на одно полюсное деление. 2. Индукционный асинхронный мотор по п.1, отличающийся тем, что на каждой торцевой стороне магнитного пакета второго элемента конец каждого стержня (3) соединен со всеми теми концами стержней (3), которые сдвинуты относительно упомянутого конца по периметру магнитного пакета второго элемента на одно полюсное деление. 3. Индукционный асинхронный мотор по пп.1 и 2, отличающийся тем, что он содержит по меньшей мере два магнитных пакета второго элемента, установленных на одном валу, при этом соединения концов стержней (3) на торцевых сторонах каждого магнитного пакета второго элемента электрически изолированы от соединений концов стержней (3) на торцевых сторонах других магнитных пакетов второго элемента.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5www.findpatent.ru
индукционный двигатель —[В.А.Семенов. Англо-русский словарь по релейной защите]
Справочник технического переводчика. – Интент. 2009-2013.
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ — то же, что асинхронный двигатель. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
репульсионно-индукционный двигатель — Репульсионный двигатель, имеющий на роторе дополнительную короткозамкнутую обмотку … Политехнический терминологический толковый словарь
синхронизированный индукционный двигатель — Неявнополюсный синхронный двигатель, у которого индуктор конструктивно выполнен как вторичный якорь фазного асинхронного двигателя … Политехнический терминологический толковый словарь
индукционный мотор — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
индукционный счетчик электроэнергии — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
Бензиновый двигатель внутреннего сгорания — Бензиновый двигатель W16 Bugatti Veyron Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической и … Википедия
Четырехтактный двигатель — Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической искрой. Управление мощностью в данном типе двигателей производится, как правило,… … Википедия
асинхронный двигатель — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
счетчик-двигатель — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
ЛИД — лидер абзац ЛИД линейный индукционный двигатель линейный индуктивный двигатель Словарь: С. Фадеев. Словарь сокращений современного русского языка. С. Пб.: Политехника, 1997. 527 с. ЛИД лист исполнения доставки например: ЛИД для вывоза материала… … Словарь сокращений и аббревиатур
technical_translator_dictionary.academic.ru
— то же, что асинхронный двигатель.
Самойлов К. И. Морской словарь. - М.-Л.: Государственное Военно-морское Издательство НКВМФ Союза ССР, 1941
.
индукционный двигатель — — [В.А.Семенов. Англо русский словарь по релейной защите] Тематики релейная защита EN induction motor … Справочник технического переводчика
репульсионно-индукционный двигатель — Репульсионный двигатель, имеющий на роторе дополнительную короткозамкнутую обмотку … Политехнический терминологический толковый словарь
синхронизированный индукционный двигатель — Неявнополюсный синхронный двигатель, у которого индуктор конструктивно выполнен как вторичный якорь фазного асинхронного двигателя … Политехнический терминологический толковый словарь
индукционный мотор — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
индукционный счетчик электроэнергии — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
Бензиновый двигатель внутреннего сгорания — Бензиновый двигатель W16 Bugatti Veyron Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической и … Википедия
Четырехтактный двигатель — Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической искрой. Управление мощностью в данном типе двигателей производится, как правило,… … Википедия
асинхронный двигатель — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
счетчик-двигатель — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
ЛИД — лидер абзац ЛИД линейный индукционный двигатель линейный индуктивный двигатель Словарь: С. Фадеев. Словарь сокращений современного русского языка. С. Пб.: Политехника, 1997. 527 с. ЛИД лист исполнения доставки например: ЛИД для вывоза материала… … Словарь сокращений и аббревиатур
dic.academic.ru
Cтраница 1
Двухфазный индукционный двигатель имеет две обмотки, расположенные под углом 90; одна из них подключена к сети, а на другую подается управляющее напряжение. Направление вращения двигателя зависит от сдвига фаз этих напряжений. Если же на обмотки подано напряжение различных частот, то двигатель вращаться не будет. [1]
Вращающий момент в двухфазном индукционном двигателе возникает за счет взаимодействия индукционных токов, наводимых в роторе, с полями статора. [3]
Для привода механизма балансировки применен двухфазный индукционный двигатель 6, который через редуктор 5 и лекало 4 вызывает перемещение сердечника и стрелки. [4]
Принципиальная схема релейной следящей системы с исполнительным двухфазным индукционным двигателем показана на фиг. [5]
Электрические машины серии ДГ объединяют в себе двухфазный индукционный двигатель с полым ротором и тахогенератор переменного тока. [7]
Магнитный усилитель МУ выбирают в зависимости от потребной мощности исполнительного двухфазного индукционного двигателя. [8]
Иногда, например при работе на такую нагрузку, как двухфазный индукционный двигатель, усилитель переменного тока должен обеспечивать малую величину и постоянство фазового сдвига. Это необходимо учитывать при выборе параметров цепей связи и смещения, постоянные времени которых, определяющие величину фазового сдвига, зависят от параметров триодов, изменяющихся при изменении режима работы, температуры и применяемого образца данного типа триода. Малая величина и постоянство фазового сдвига особенно необходимы при питании выходных цепей усилителя пульсирующим напряжением от выпрямителя, что часто применяется в системах автоматического управления. [9]
В этих устройствах магаитныи сервоусилитель компенсационного типа используется для питания двухфазного индукционного двигателя с независимым возбуждением. Эти устройства описаны в следующей главе. [10]
Напря жение с вторичной обмотки трансформатора i подается на управляющие обмотки двухфазного индукционного двигателя 7 ( ДЙД-О. Обмотка возбуждения двигателя питается напряжением от сети U 36 в, / 400 гц. Движок потенциометра / обычно связан с чувствительным элементом прибора и перемещается в сооответ-ствии с изменением измеряемой величины. При появлении сигнала на чувствительном элементе движок потенциометра смещается в ту или другую сторону и равновесие мостовой схемы нарушается. Появившееся при этом напряжение на измерительной диагонали моста после усиления поступает на управляющие обмотки двигателя. [11]
На рис. 6.31 приведена схема полупроводникового усилителя следящей системы для управления двухфазным индукционным двигателем. [12]
На рис. 5.29 приведена схема полупроводникового усилителя следящей системы для управления двухфазным индукционным двигателем. [14]
Сопротивления R M, R могут представлять собой две одинаковые полуобмотки управления двухфазного индукционного двигателя с независимым возбуждением, используемого в высококачественной следящей системе. В этом случае величина постоянной составляющей /, которая также является функцией / у, может быть успешно использована для динамического торможения двухфазного двигателя. Такая схема особенно эффективна в случае применения двухфазного асинхронного двигателя с малым собственным демпфированием. При этом добавление демпфирующего момента за счет постоянной составляющей тока нагрузки позволяет избежать перерегулирования и автоколебаний в следящей системе. [15]
Страницы: 1 2 3
www.ngpedia.ru
¹ 15613
Класс 2ld, 21
ПАТЕНТ НА ИЗОБРЕТЕНИЕ
ОПИСАНИЕ индукционного двигателя.
К патенту С. В. Булебакииа, заявленному 22 июня
1928 года (ваяв. свид. № 29231).
0 выдаче патента. опубликовано 30 апреля 1930 года. Действие патента распространяется на 15 лет от 30 апреля 1930 года.
Одним из недостатков, которым обладают индукционные двигатели переменного тока является то, что эти двигатели в большинстве случаев для создания магнитного поля требуют от сети намагничивающего тока, вследствии чего эти двигатели, в особенности малой мощности, работают с малым коэфициентом мощности. С целью увеличения коэфициента. мощности индукционных двигателей прибегают ко всякого рода компенсационным устройствам, однако в большинстве случаев компенсационные устройства индукционных двигателей обладают наличием коллектора, который является не особенно желательной частью машины. В связи с этим обстоятельством является необходимым создание таких двигателей переменного тока, которые в своем устройстве не имели бы коллектора и не требовали бы постоянного тока для создания магнитного поля, как это имеет место в синхронных двигателях.
Предлагаемое изобретение касается индукционного двигателя с промежуточным ротором и имеет целью создание двигателя, который не требовал бы намагничивающего тока из сети и, следовательно, работал бы с коэфициентом мощности около единицы.
На чертеже фиг. 1 изображает схему предлагаемого индукционного двигателя; фиг. 2 †схе видоизменения его.
В предлагаемом индукционном двигателе с промежуточным ротором. последний свободно насажен на вал двигателя и выполнен из постоянных магнитов (фиг. 2).
Передача крутящего момента валу осуществляется ротором с обмоткой, который жестко связан с валом.
Промежуточный ротор двигателя, выполненный из железа и снабженный короткозамкнутою обмоткой, может быть закрепляем на валу, при чем внутри этого ротора помещают ротор в виде постоянного магнита(фиг. 1).
Необходимо отметить, что последнйе уапехи в области получения специальных сортов сталей дают возможность создать весьма сильные и устойчивые постоянные магниты; так, например, высококобальтовые стали позволяют изготовлять постоянные магниты, обладающие остаточной магнитной индукцией в 9000 + 10000 Cgs, а задерживающей силой — до 250 гауссов. Такой высокосортный материал может быть с успехом использован для изготовления постоянных магнитов, геометрическая форма которых оказывает сравнительно малое влияние на уменьшение остаточной магнит/.Е. JL
Òèï. Ридрогр. Унр. Управл, В.-M. Сил РККА. Ленинград, здание Гл. Адмиралтейства.. но индукции при разомкнутом или полузамкнутом состоянии магнитной цепи.
Если магнитную систему двигателя сде лать" насыщенной, то двигатель может работать с опережающим током или служить в качестве синхронного конденсатора.
Предмет патента.
1. Индукционный двигатель с промежуточным ротором, характеризующийся тем, что свободно насаженный на вал двигателя промежуточный ротор выполнен из постоянных магнитов.
2. Видоизменение охарактеризованного в п. 1 двигателя, отличающееся тем, что промежуточный ротор, закрепленный на валу, выполнен из железа .и снабжен короткозамкнутой обмоткою, при чем внутри этого ротора помещен ротор в виде постоянного магнита.


Похожие патенты:

Изобретение относится к области электромашиностроения, в частности к области электродвигателестроения, и может найти применение в электроприводах биротативного типа (в приводах двойного вращения)

Изобретение относится к машиностроению и предназначено для производства электроприводов повышенной надежности и высоким КПД

Изобретение относится к электротехнике

Изобретение относится к тяговым электроприводам транспортных средств

Изобретение относится к области электротехники, а именно к асинхронным двигателям

Изобретение относится к электротехнике и может быть использовано в погружных электродвигателях

Изобретение относится к области электротехники и электромашиностроения, в частности к регулируемым электрическим машинам переменного тока

Изобретение относится к области электротехники и касается особенностей конструктивного выполнения регулируемых электрических машин переменного тока

Изобретение относится к области электротехники и электромашиностроения, в частности к электрическим машинам переменного тока широкого применения

Индукционный двигатель, индукционный электродвигатель переменного тока
www.findpatent.ru
ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ — то же, что асинхронный двигатель. Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
индукционный двигатель — — [В.А.Семенов. Англо русский словарь по релейной защите] Тематики релейная защита EN induction motor … Справочник технического переводчика
репульсионно-индукционный двигатель — Репульсионный двигатель, имеющий на роторе дополнительную короткозамкнутую обмотку … Политехнический терминологический толковый словарь
синхронизированный индукционный двигатель — Неявнополюсный синхронный двигатель, у которого индуктор конструктивно выполнен как вторичный якорь фазного асинхронного двигателя … Политехнический терминологический толковый словарь
индукционный мотор — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
индукционный счетчик электроэнергии — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
Бензиновый двигатель внутреннего сгорания — Бензиновый двигатель W16 Bugatti Veyron Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической и … Википедия
Четырехтактный двигатель — Бензиновые двигатели это класс двигателей внутреннего сгорания, в цилиндрах которых предварительно сжатая топливовоздушная смесь поджигается электрической искрой. Управление мощностью в данном типе двигателей производится, как правило,… … Википедия
асинхронный двигатель — asinchroninis variklis statusas T sritis automatika atitikmenys: angl. asynchronous motor; induction motor vok. Asynchronmotor, m; Induktionsmotor, m rus. асинхронный двигатель, m; индукционный мотор, m pranc. moteur à induction, f; moteur… … Automatikos terminų žodynas
счетчик-двигатель — variklinis skaitiklis statusas T sritis Standartizacija ir metrologija apibrėžtis Indukcinis elektros energijos kiekio matuoklis. atitikmenys: angl. motor meter vok. Motorzähler, m; Umlaufzähler, m rus. индукционный счетчик электроэнергии, m;… … Penkiakalbis aiškinamasis metrologijos terminų žodynas
ЛИД — лидер абзац ЛИД линейный индукционный двигатель линейный индуктивный двигатель Словарь: С. Фадеев. Словарь сокращений современного русского языка. С. Пб.: Политехника, 1997. 527 с. ЛИД лист исполнения доставки например: ЛИД для вывоза материала… … Словарь сокращений и аббревиатур
translate.academic.ru