Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iвне зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
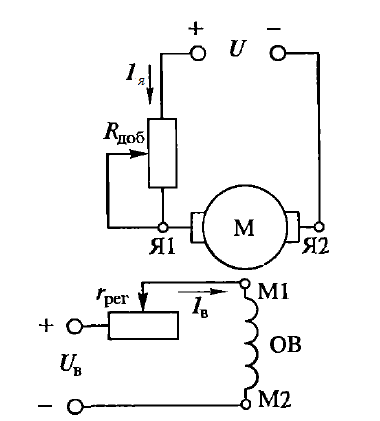 Рисунок 1
Рисунок 1Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными.
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

откуда:

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
electrikam.com
Основной характеристикой двигателя постоянного тока, определяющей его свойства в установившемся режиме, является механическая характеристика
 при
при  и
и .
.
Уравнение механической характеристики получается из (6.1)
 . (6.2)
. (6.2)
На рис. 6.42 представлены механические характеристики при различных способах возбуждения. Механическая характеристика двигателя параллельного возбуждения при небольшой размагничивающей реакции якоря ( ) имеет слабо падающий характер (кривая 1).
) имеет слабо падающий характер (кривая 1).
Если размагничивающая реакция двигателя параллельного возбуждения велика (поток Ф существенно снижается при увеличении нагрузки), то механическая характеристика будет иметь положительный наклон (кривая 1). Такая характеристика, как правило, не позволяет получить установившийся режим.
В двигателях последовательного возбуждения результирующий поток пропорционален току якоря,
 ,
,
а электромагнитный момент пропорционален квадрату тока якоря,
 .
.
С учетом этих соотношений уравнение механической характеристики двигателя последовательного возбуждения приобретает вид

 . (6.3)
. (6.3)
Этому уравнению соответствует кривая 2 (рис. 3), имеющая гиперболический характер. При  частота вращения якоря
частота вращения якоря , поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода.
, поэтому двигатели последовательного возбуждения не могут работать в режиме холостого хода.
Рис.3
Вместе с тем квадратичная зависимость электромагнитного момента от тока якоря дает важное преимущество двигателям последовательного возбуждения при перегрузках перед двигателями параллельного возбуждения, момент которых является линейной функцией тока  . Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе (
. Это преимущество особенно существенно при пуске, так как при одном и том же пусковом токе ( ) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы.
) двигатели последовательного возбуждения развивают больший момент, чем двигатели параллельного возбуждения. Поэтому двигатели последовательного возбуждения получили широкое применение на транспортных установках, где пусковой режим является одним из основных режимов работы.
Рис. 4
Механическая характеристика двигателя смешанного возбуждения (кривая 3 рис. 3) занимает промежуточное положение. Обладая близкими с двигателями последовательного возбуждения свойствами при перегрузках, двигатели смешанного возбуждения могут работать и при малых нагрузках, что позволяет осуществить рекуперацию энергии в сеть при  (рис. 6.42), так как машина переходит в генераторный режим (
(рис. 6.42), так как машина переходит в генераторный режим ( ). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.
). Это свойство можно использовать в транспортных установках при движении с горы, создавая тормозной момент и одновременно возвращая в сеть запасенную кинетическую энергию.


а) б)
Рис.4
Согласно (6.2), регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления  в цепь якоря иизменения напряжения сети
в цепь якоря иизменения напряжения сети  . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата
. В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата в цепи возбуждения. При увеличении сопротивления
в цепи возбуждения. При увеличении сопротивления потокФ уменьшается и частота вращения растет. На рис. 4а представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах
потокФ уменьшается и частота вращения растет. На рис. 4а представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах  ,
, . Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
. Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
Регулирование частоты вращения двигателя путем введения в цепь якоря дополнительного сопротивления  позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 4 б). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 4 б). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
 ,
,
а потребляемая из сети мощность от частоты вращения не зависит,
 .
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
 .
.

Рис.5
Кроме того, при введении дополнительного сопротивления  жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 5 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
В качестве источников регулируемого напряжения используются генератор постоянного тока (рис. 2, а) либо полупроводниковый выпрямитель (рис. 2, б). Схема с полупроводниковым выпрямителем обладает более высоким быстродействием по сравнению со схемой генератор-двигатель, но уступает по перегрузочной способности. Кроме того, работа полупроводникового преобразователя ухудшает качество электрической энергии сети переменного тока из-за генерации высших гармоник напряжения и тока.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
Регулирование частоты вращения двигателей последовательного возбуждения осуществляется путем изменения тока в последовательной обмотке  или напряжения якоряU с помощью шунтирующих реостатов (рис. 6.46).
или напряжения якоряU с помощью шунтирующих реостатов (рис. 6.46).
При шунтировании обмотки возбуждения ток  уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает.
уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает.
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД
 .
.
Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения:
 ,
,
где  - частота вращения якоря при
- частота вращения якоря при .
.
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
studfiles.net
Исследование двигателя постоянного тока независимого возбуждения
Электрические двигатели постоянного тока (ДПТ) отличает от других двигателей наличие специального механического коммутатора – коллектора. Несмотря на то, что из-за этого ДПТ менее надежны и дороже двигателей переменного тока, имеют большие габариты, они находят применение, когда их особые свойства имеют решающее значение. Часто ДПТ обладают преимуществами перед двигателями переменного тока по диапазону и плавности регулирования частоты вращения, по перегрузочной способности и экономичности, по возможности получения характеристик специального вида, и т.д.
В настоящее время ДПТ применяют в электроприводах прокатных станов, различных подъемных механизмов, металлообрабатывающих станков, роботов, на транспорте и т.д. ДПТ небольшой мощности используют в различных автоматических устройствах.
Устройство и принцип действия ДПТ
Внешний вид двигателя постоянного тока показан на рис. 1, а его поперечный разрез в упрощенном виде – на рис. 2. Как и любая электрическая машина, он состоит из двух основных частей – статора и ротора. Статор неподвижен, ротор вращается. Статор состоит из массивного стального корпуса 1, к которому прикреплены главные полюсы 2 и дополнительные полюсы 4. Главные полюсы 2 имеют полюсные наконечники, служащие для равномерного распределения магнитной индукции по окружности якоря. На главных полюсах размещают обмотки возбуждения 3, а на дополнительных – обмотки дополнительных полюсов 5.

Рис. 1. Внешний вид двигателя постоянного тока
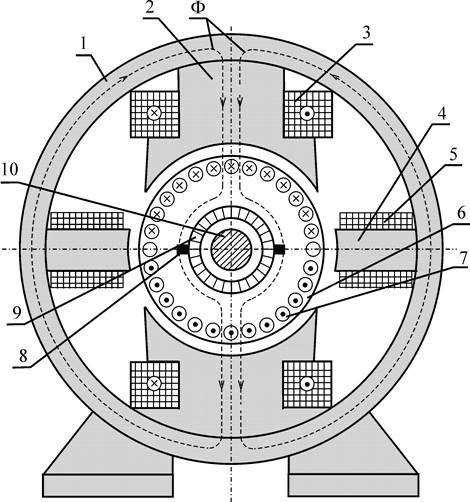
Рис. 2. Поперечный разрез ДПТ (условное изображение): 1 – корпус; 2 – главные полюсы; 3 – обмотка возбуждения; 4 – дополнительные полюсы; 5 – обмотка дополнительных полюсов; 6 – якорь; 7 – обмотка якоря; 8 – щетки; 9 – коллектор; 10 – вал.
В пазах, расположенных на поверхности якоря 6, размещается обмотка якоря 7, выводы от которой присоединяют к расположенному на валу 10 коллектору 9. К коллектору с помощью пружин прижимаются графитные, угольно-графитные или медно-графитные щетки 8.
Обмотка возбуждения машины питается постоянным током и служит для создания основного магнитного поля, показанного на рис. 2 условно с помощью двух силовых линий, изображенных пунктиром. Дополнительные полюсы 4 уменьшают искрение между щетками и коллектором. Обмотку дополнительных полюсов 5 соединяют последовательно с обмоткой якоря 7 и на электрических схемах часто не изображают. На рис. 2 показана машина постоянного тока с двумя главными полюсами. В зависимости от мощности и напряжения машины могут иметь и большее число полюсов. При этом соответственно увеличивается число комплектов щеток и дополнительных полюсов.
У ДПТ с независимым возбуждением, как показано на рис. 3, электрические цепи обмоток якоря 1 и возбуждения 2 электрически не связаны и подключаются к различным источникам питания с напряжениями  и
и  . Как правило,
. Как правило,  . В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
. В общем случае последовательно с якорной обмоткой и обмоткой возбуждения могут быть включены дополнительные резисторы rд и rр (см. рис.3). Их назначение будет пояснено далее.
Двигатели относительно небольшой мощности обычно изготавливают на одинаковые напряжения и . В этом случае цепи обмоток якоря и возбуждения соединяют между собой параллельно и подключают к общему источнику питания с напряжением  . Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
. Такие ДПТ называют двигателями параллельного возбуждения. Если мощность источника питания значительно превышает мощность двигателя, то процессы в якорной обмотке и в обмотке возбуждения протекают независимо. Поэтому такие двигатели являются частным случаем ДПТ независимого возбуждения и их свойства одинаковы.
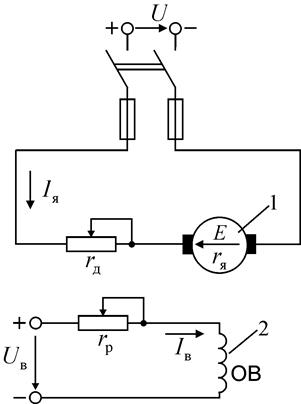
Рис. 3. Электрическая схема подключения ДПТ независимого возбуждения: 1 – цепь обмотки якоря; 2 – цепь обмотки возбуждения.
При подключении двигателя к источнику питания в обмотке якоря протекает ток Iя, который взаимодействует с магнитным полем, создаваемым обмоткой возбуждения. В результате этого возникает электромагнитный момент, действующий на якорь
 , (1)
, (1)
где k – коэффициент, зависящий от конструктивных параметров машины; Ф – магнитный поток одного полюса.
При превышении моментом М момента сопротивления нагрузки Мс якорь начинает вращаться с угловой скоростью w и в нем наводится ЭДС
 (2)
(2)
У двигателей полярность ЭДС Е противоположна полярности напряжения источника U, поэтому с ростом скорости w ток Iя уменьшается
 (3)
(3)
где rя – сопротивление якорной цепи двигателя при rд = 0.
Из соотношения (1) следует, что это приводит к снижению электромагнитного момента. При равенстве моментов  и
и  скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока
скорость вращения якоря перестает изменяться. Чтобы изменить направление вращения двигателя следует изменить полярность напряжения . Это приведет к изменению направления тока  и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
и направления момента . Двигатель начнет замедляться, а затем разгонится в обратную сторону.
Пуск двигателя
В первое мгновение при пуске скорость двигателя w = 0 и в соответствии с формулой (2) ЭДС якоря Е = 0. Поэтому при подключении якоря двигателя к напряжению пусковой ток якоря  , как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
, как следует из формулы (3), ограничивается только сопротивлением якорной цепи rя (при rд=0)
 (4)
(4)
Значение сопротивления  относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя
относительно невелико (обычно в пределах 1 Ом), поэтому если напряжение близко по значению к номинальному напряжению, значение пускового тока может в (10–30) раз превышать номинальное значение тока двигателя  . Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
. Это недопустимо, поскольку ведет к сильному искрению и разрушению коллектора, а при частых пусках возможен перегрев обмотки якоря.
Как следует из формулы (4), одним из вариантов ограничения пускового тока является увеличение суммарного сопротивления якорной цепи ДПТ при неизменном значении напряжения U. Для этого последовательно с якорем включают дополнительный пусковой реостат (на рис. 3 не показан), который обычно выполняют в виде нескольких ступеней. Ступени пускового реостата выключают поэтапно по мере увеличения скорости двигателя. При этом в якоре двигателя за время пуска могут выделяться значительные потери мощности.
Более экономичным способом снижения пускового тока является пуск ДПТ при плавном увеличении напряжения на якоре U по мере разгона двигателя и увеличения ЭДС Е. Как следует из выражения (3), можно подобрать такой темп увеличения напряжения U, при котором ток на протяжении всего времени пуска не будет превышать допустимого значения. В лабораторной установке, используемой при выполнении данной работы, используется именно этот более экономичный способ ограничения пускового тока.
poznayka.org
Двигатель постоянного тока (ДПТ)
Устройство:
1. Статор (индуктор).
2. Ротор (якорь).
В статор входит: корпус, магнитопровод в виде полюсов, на которых расположена обмотка возбуждения.
Индуктором называют ту часть машины, которая предназначена для создания магнитного поля.

В ротор входит: вал, магнитопровод, в пазах которого расположена обмотка, и коллектор со щетками.
Условное обозначение:

Схемы ДПТ с различными типами возбуждения:

Принцип работы:
UВ → IВ → Ф;
UЯ → IЯ,
где IВ — ток возбуждения; IЯ — ток якоря.
Взаимодействие тока якоря с магнитным потоком Ф статора создает вращающий момент:
 ,
,
где СМ — конструктивный коэффициент.
Под действием М ротор начинает вращаться, пересекая при этом силовые линии магнитного поля, вследствие чего в нем индуктируется ЭДС, которую называют ЭДС вращения:
 .
.
Основные уравнения ДПТ:
Ими являются уравнения электрического равновесия ротора:
 ;
;
 .
.
где  — падение напряжения в цепи якоря;
— падение напряжения в цепи якоря; — ЭДС вращения.
— ЭДС вращения.
Из этой формулы получаем практически важное соотношение:
 .
.
Подставим вместо
 .
.
И получим:
 .
.
По этому выражению можно построить механическую характеристику ДПТ n = f(M), задаваясь нагрузкой, т. е. М, можно найти соответствующую ей частоту вращения. Если при этом U = Uном, Ф = Фном имеем естественную механическую характеристику.
Механическая характеристика ДПТ:

Точка «1» — холостой ход; координаты М = 0, n = n0;
«2» — номинальный режим; координаты Мн, nн;
«3» — предельно-допустимая кратковременная нагрузка.
Участок 1–2 — допустимая длительная работа.
Участок 2–3 — допустимая только кратковременная работа.
Обычно Iя доп =(2 ÷ 2,5)Iя ном.
Регулирование скорости ДПТ:
 ,
,
где  — сопротивление якорной цепи.
— сопротивление якорной цепи.
Откуда вытекает возможность регулирования скорости тремя способами:  ,
, ,
, .
.
1. Рассмотрим искусственные механические характеристики при регулировании скорости, изменением подводимого  .
.
Очевидно, что по условиям эксплуатации двигателя возможно изменение  только в сторону уменьшения
только в сторону уменьшения  , а, следовательно, скорость двигателя можно регулировать только вниз, при этом скорость холостого хода (точка «1») снижается.
, а, следовательно, скорость двигателя можно регулировать только вниз, при этом скорость холостого хода (точка «1») снижается.
Характеристики примут вид:

Если нагрузка на двигателе представлена характеристикой МС, то изменяя напряжение от  до
до можно получить различные частоты вращения отnА до nА3.
можно получить различные частоты вращения отnА до nА3.
2. Регулирование скорости путем изменения величины магнитного потока.
Величину магнитного потока можно изменять с помощью тока IВ, например реостатом, только в сторону уменьшения. Уменьшение магнитного потока приведут к увеличению скорости. Таким образом посредством магнитного потока можно регулировать скорость только вверх.


3. Рассмотрим механические характеристики при регулировании скорости, изменением сопротивления якорной цепи.

 ,
,
 не зависит от Rп, следовательно искусственные характеристики имеют общую точку
не зависит от Rп, следовательно искусственные характеристики имеют общую точку  .
.
Ток при пуске когда n = 0 и E = 0 имеет вид  и достигает недопустимо больших значений, что не позволяет запустить двигатель. Для уменьшения пусковых токов вводят в цепь якоря добавочное сопротивление
и достигает недопустимо больших значений, что не позволяет запустить двигатель. Для уменьшения пусковых токов вводят в цепь якоря добавочное сопротивление :
:
 .
.
Ток уменьшается и характеристика имеет вид:

6
studfiles.net
Двигатель постоянного тока (ДПТ) — первый разработанный тип электродвигателей.
Двигатель состоит из якорной обмотки (ротора с якорной обмоткой), статора, щёточного узла. ДПТ являются обратимыми электрическими машинами, то есть в определенных условиях способны работать как генераторы.
На статоре ДПТ располагаются в зависимости от конструкции:
Двигатели постоянного тока различаются по способу коммутации обмоток возбуждения. Вид подключения обмоток возбуждения существенно влияет на тяговые и электрические характеристики эл.двигателя. Существуют схемы независимого, параллельного, последовательного и смешанного включения обмоток возбуждения.
Ротор любого ДПТ состоит из многих катушек, на одну из которых подаётся питание в зависимости от угла поворота ротора относительно статора. Применение большого числа (несколько десятков) катушек необходимо для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть создания максимального момента на роторе).
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов, расположенных по оси ротора. Существуют и другие конструкции коллекторного узла.
Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки часто размыкают и замыкают пластины-контакты коллектора ротора, как следствие при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает ресурс ДПТ. Искрение уменьшают выбором взаимного положения полюсов ротора относительно статора(снижая ток коммутации), а также подключением внешних реактивных элементов (конденсаторов).
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллекора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора. Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим, при проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
На рамку с током, находящуюся в магнитном поле возбуждения статора, действуют силы, создающие момент на роторе.
Зависимость частоты от момента на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения мех. характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Зависимость частоты от напряжения на валу ДПТ. Отображается в виде графика. Горизонтальная ось (абцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом напряжении питания, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений напряжения питания говорят о семействе регулировочных хар-ик ДПТ.
Управляемые приводы на основе ДПТ используют для управления идеи ШИМ.
Управление двигаталем осуществляется по току в обмотке двигателя, который пропорционален напряжению, приложенному к этой обмотке. Реакцию двигателя на данное напряжение при определённом внешнем моменте можно увидеть на соответствующей регулировочной характеристике. Регулировочная характеристика показывает скорость, которую двигатель достигнет в установившемся режиме.
Основные формулы, используемые при управлении ДПТ:
M = kmI — момент, развиваемый двигателем, пропорционален току в обмотке якоря (ротора). km — коэффициент момента двигателя.
E = keω — противоЭДС в обмотках якоря пропорционально угловой частоте вращения ротора. ke — коэффициент ЭДС двигателя.
U = RI — закон Ома для обмотки ротора. R — сопротивление обмотки ротора, I, U — ток в ней и напряжение, подаваемое на обмотку ротора
Достоинства:
Недостатки:
mediaknowledge.ru
 Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа.
Полная механическая характеристика двигателя постоянного тока позволяет правильно определиться с основными свойствами электродвигателя, а также проконтролировать их соответствие всем требованиям, предъявляемым на сегодняшний день к машинам или устройствам технологического типа. Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Определенное количество механической энергии поступает от роторной части к другим элементам, что обусловлено наличием передачи ременного типа.
Синхронные устройства обращенного функционала характеризуются сменой выполнения задач статором и ротором. Первый элемент служит для возбуждения магнитного поля, а второй в этом случае преобразует достаточное количество энергии.
Якорное вращение в условиях магнитного поля наводится при помощи ЭДС, а движение направлено в соответствии с правилом правой руки. Поворот на 180о сопровождается стандартной сменой движения ЭДС.

Принцип действия двигателя постоянного тока
Коллекторы посредством щеточного механизма соединяются с двумя витковыми сторонами, что провоцирует удаление пульсирующего напряжения и вызывает образование постоянных токовых величин, а снижение якорной пульсации осуществляется добавочными витками.
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Механические моторные характеристики подразделяются на показатели естественного и искусственного вида. Неоспоримые преимущества ДПТ представлены повышенными показателями производительности и увеличенным КПД.
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Моторы ПТ НВ обладают обмоточным возбуждением, подключаемым к отдельному виду источника для электрического питания. В таком случае обмоточная цепь возбуждения ДПТ НВ дополняется реостатом регулировочного типа, а якорная цепь снабжается добавочными или пусковыми реостатными элементами.
Отличительной особенностью такого вида мотора является независимость токового возбуждения от якорного тока, что обуславливается независимым питанием обмоточного возбуждения.

Характеристики электродвигателей с независимым и параллельным возбуждением
Линейная механическая характеристика при независимом типе возбуждения:
Данным типом уравнения определяется зависимость вращательной скорости мотора к моменту вала.
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.

Механические характеристики при последовательном и смешанном возбуждении
При использовании последовательного типа возбуждения:
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
ω = Uя/ kФ — ( Rя + Rд)/( kФ)
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
Характеристики уравнения механического типа представлены стандартной устойчивостью, жесткостью и линейностью.
Согласно применяемым механическим характеристикам любые ДПТ отличаются конструктивной простотой, доступностью управления и возможностью осуществлять регулировку частоты валового вращения, а также легкостью пуска ДПВ. Кроме прочего, такие устройства могут применяться в качестве генератора и обладают компактными габаритами, что хорошо нивелирует недостатки в виде быстро изнашиваемых графитовых щеток, высокой себестоимости и необходимости обязательно подключать токовые выпрямители.
proprovoda.ru
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.

Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в "разнос". Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
 |
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).

Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| - питающее напряжение; | ||
| - магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
h4e.ru