Мир в опасности. Если Россия сдастся планета окажется во власти фашистской диктатуры, которая Гитлеру даже не снилась.Эксплуатация Российской колонии усиливается. Основная масса ругает правительство, а с правительством ассоциируют Путина: Путин виноват, Путин виноват, он же царь у него полная власть. А то что в 1993 году народ официально передал власть в руки МВФ, как то забыли. Ведь очевидно же, что в условиях дикого капитализма вся власть у того, кто печатает деньги. Бесконтрольно печатает прошу заметить. В однополярном мире один центр власти, один центр силы и один центр принятия решений. И этот центр находится в Вашингтоне США округ Колумбия.МВФ требует поднять пенсионный возраст уже давно. Но Путину удавалось уклоняться от этого решения. По Конституции РФ в ст. 15 ч. 4 в стране установлен приоритет международного права над Российским законодательством. т.е. решения МВФ для нас обязательны к исполнению.Даже не надейтесь, что всё ограничится только лишь повышением пенсионного возраста и налогами. Курс Запада взят на полное уничтожение и разграбление остатков советского союза и его населения.Есть ли выход?Да есть: референдум по отмене колониальных статей Конституции. Субъект принятия этого решения только Народ. Народ является источником любой власти и народ в 1993 году через референдум передал власть международному сообществу . Решение народа имеет право отменить только народ.Как это сделать?Технология отработана тысячи раз нашими предками. У нас тысячелетний опыт государственного строительства. Мы создали самое крупное и богатое государство в мире. И сами приняли решение и идём на убой в угоду капиталистического господства на планете.Как помочь освобождению Родины?
Каждый из вас находясь на своём месте способен помочь НОД: 1. Печатать и распространять информационные материалы. 2. Вступить в наши группы в соц. сетях, взаимодействовать с соратниками, вести активную работу в сети распространяя информацию. 3. Принимать участие в общественных мероприятиях организованных НОД вашего города, региона и всероссийских акциях организованных В.Путиным. Для этого достаточно держать связь с координатором в вашем городе. Чем больше нас будет на мероприятиях, тем быстрее мы победим. 4. Самостоятельно организовывать мероприятия, встречи, собрания, приглашать людей и соратников НОД, доносить информацию, включать всех в освободительный процесс.
uzclip.net
24 Янв
Идеально подходит для применения в устройствах с питанием от аккумуляторной батареи
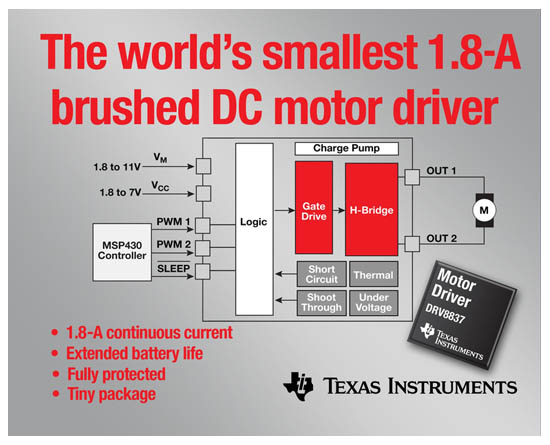 DRV8837 представляет собой высокоинтегрированный драйвер маломощного коллекторного электродвигателя, ориентированный на применение в камерах, потребительских товарах, игрушках и других устройствах с низковольтным питанием или с питанием от аккумуляторной батареи, осуществляющих управление механическим перемещением исполнительных элементов.
DRV8837 представляет собой высокоинтегрированный драйвер маломощного коллекторного электродвигателя, ориентированный на применение в камерах, потребительских товарах, игрушках и других устройствах с низковольтным питанием или с питанием от аккумуляторной батареи, осуществляющих управление механическим перемещением исполнительных элементов.
Драйвер оснащен одним H-мостовым выходным каскадом и предназначен для управления одним коллекторным электродвигателем постоянного тока или одной обмоткой шагового двигателя, а также другими устройствами, такими как соленоиды. Выходные каскады драйвера управления обмоткой двигателя построены на N-канальных силовых MOSFET транзисторах, сконфигурированных как полный Н–мост. Интегрированная схема подкачки заряда (charge pump) обеспечивает необходимое напряжение для управления затворами MOSFET транзисторов.
DRV8837 обеспечивает выходной ток до 1.8 А и предназначен для управления электродвигателями с рабочим напряжением от 1.8 В до 11 В. Диапазон напряжения питания логических узлов микросхемы составляет от 1.8 В до 7 В. DRV8837 реализует стандартную логику входного интерфейса с ШИМ–управлением (IN / IN, трансляция входного сигнала на соответствующий выходной полумост) и оснащен схемами защиты от превышения допустимого тока и короткого замыкания, а также блокировки работы при недопустимом снижении напряжения питания и перегреве.
Устройство доступно в 8–выводном корпусе WSON PowerPAD™ размером 2 мм х 2 мм х 0.8 мм с открытой контактной площадкой для эффективного отвода тепла.
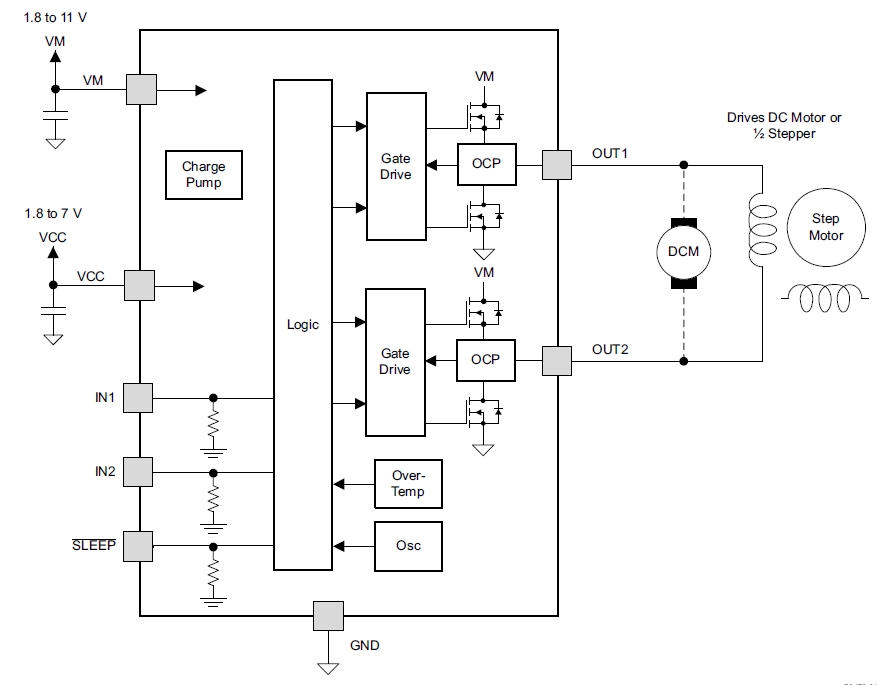 |
| Типовая схема включения DRV8837 |
Отличительные особенности:
Область применения:
 Инструментальные средства:
Инструментальные средства:
Запросить образцы, средства разработки или техническую поддержку
 Документация на DRV8837 (англ.)
Документация на DRV8837 (англ.)
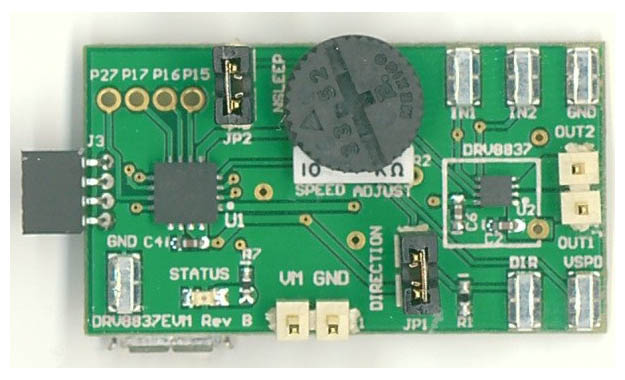
Руководство пользователя отладочной платы DRV8837EVM (англ.)
www.ebvnews.ru
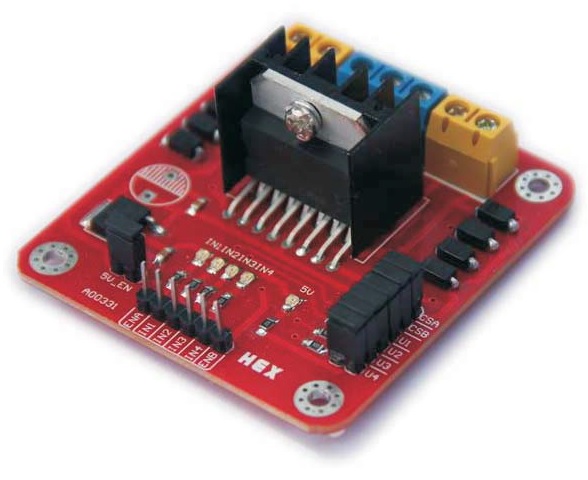
Сдвоенный драйвер коллекторных двигателей на базе L298
 Англоязычный оригинал инструкции
Англоязычный оригинал инструкцииШилд основывается на чипе L298 и позволяет управлять двумя коллекторными моторами или одним шаговым двигателем.
Технические характеристики:Напряжение питания: 4В - 16ВМаксимальный ток: 2А на каналНапряжение логики: TTL 5ВМаксимальная мощность: 25ВтВес: 35гРазмеры: 55х60х30мм
Назначение перемычек и разъемов:
Подключение одного коллекторного двигателя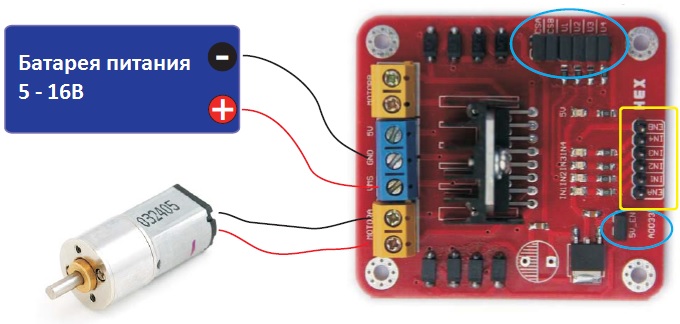 Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1 - 5V, IN2 - GND - движение вперед IN1 - GND, IN2 - 5V - движение назад ENA - 5V - максимальная скорость движения ENA - GND - остановка ENA - ШИМ - изменение скорости пропорционально ширине импульса
Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1 - 5V, IN2 - GND - движение вперед IN1 - GND, IN2 - 5V - движение назад ENA - 5V - максимальная скорость движения ENA - GND - остановка ENA - ШИМ - изменение скорости пропорционально ширине импульсаПодключение двух коллекторных двигателей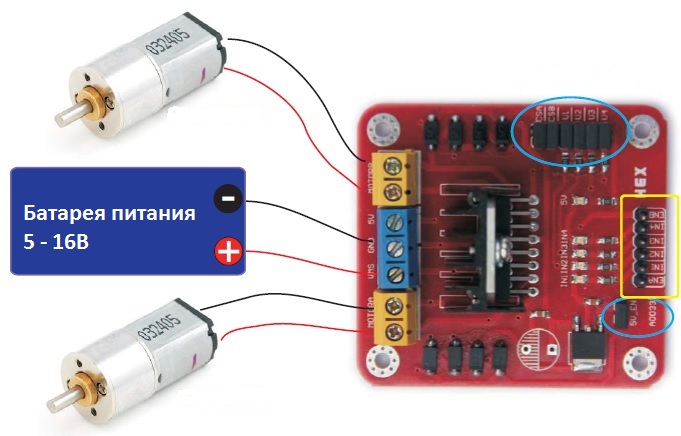 Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1 - 5V, IN2 - GND - движение вперед канал А IN1 - GND, IN2 - 5V - движение назад канал А ENA - 5V - максимальная скорость движения канал А ENA - GND - остановка канал А ENA - ШИМ - изменение скорости на канале А пропорционально ширине импульса
Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1 - 5V, IN2 - GND - движение вперед канал А IN1 - GND, IN2 - 5V - движение назад канал А ENA - 5V - максимальная скорость движения канал А ENA - GND - остановка канал А ENA - ШИМ - изменение скорости на канале А пропорционально ширине импульса
Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN3 - 5V, IN4 - GND - движение вперед канал B IN3 - GND, IN4 - 5V - движение назад канал B ENB - 5V - максимальная скорость движения канал B ENB - GND - остановка канал B ENB - ШИМ - изменение скорости на канале B пропорционально ширине импульса
Подключение шагового двигателя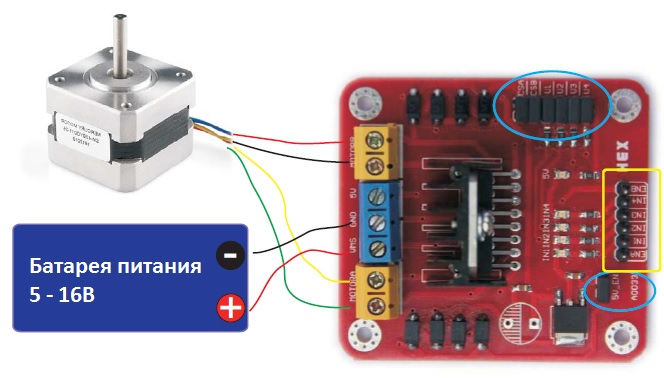 Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1..IN4 подключаются к микроконтроллеру и управляются программно ENA и ENB - 5В - разрешение работы двигателя ENA или ENB - GND - двигатель не работает
Перемычки CS и Un должны быть все установлены. Перемычка 5V_EN должна быть установлена. IN1..IN4 подключаются к микроконтроллеру и управляются программно ENA и ENB - 5В - разрешение работы двигателя ENA или ENB - GND - двигатель не работает
Подключение к Arduino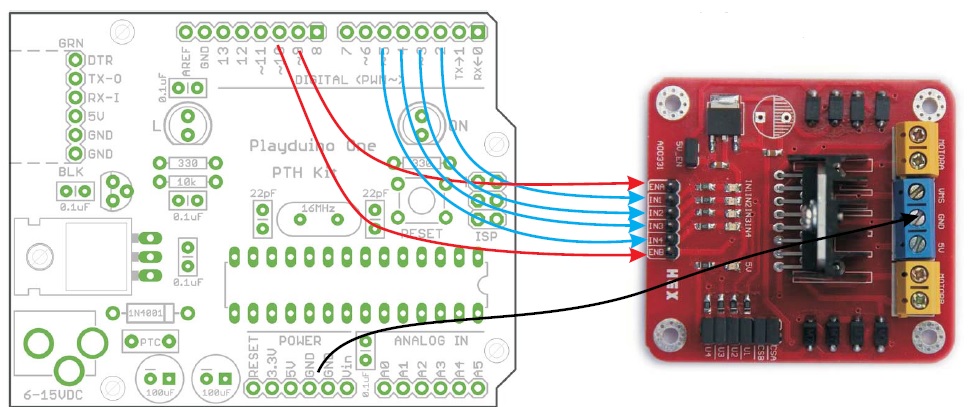
При необходимости управления скоростью двигателей по красным линиям необходимо подать ШИМ-сигнал. Внимание! Сигнал управления сервоприводами тут не подойдет. Сигнал должен иметь частоту около 490Гц. Ширина импульса должна варьироваться от 0 до 2-х миллисекунд.
Схема 
rc-master.ucoz.ru
В копилку маломощных драйверов коллекторных двигателей L293, L298, drv8833, H-мост на полевиках, новое пополнение TB6612. Небольшая двухканальная микросхема в корпусе SSOP24 размером 7,6х8,3мм. С напряжением до 15В и током до 1,2А на канал.
Драйвер коллекторного двигателя TB6612
Микросхема приобреталась на taobao, на ebay предложений по продажи самой микросхемы мало, но на всех интернет площадках распространены модули на её основе.
Характеристики
| Количество каналов | 2 |
| Напряжение на моторе | 2,5-13,5В (15В максимум) |
| Напряжение питания (цифровая часть) | 2,7-5,5В |
| Выходной ток (на 1 канал) | 1,2А (рабочий), 3,2А (пик) |
| Частота | до 100кГц |
Схема простая, обвязки мало.
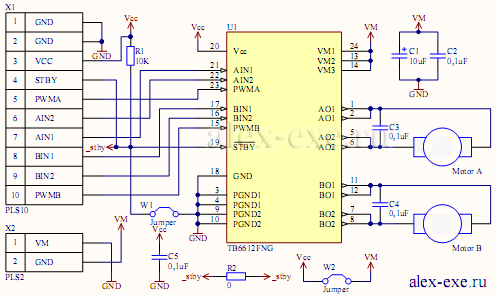
Схема
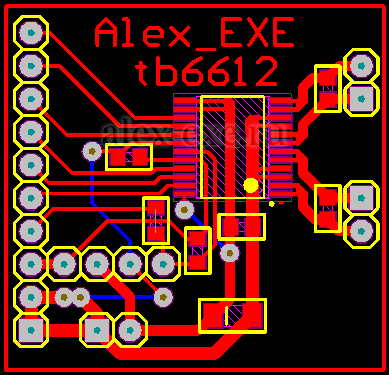
Печатка
Размер платы 29х28мм. Плата выполнена на куске одностороннего стеклотекстолита с 3-мя перемычками с обратной стороны, по желанию можно сделать двухстороннюю. Основной элемент платы — микросхема TB6612FNG. Из обвязки 2 резистора 0603, один на 10кОм, второй перемычка 0 Ом; и 5 конденсаторов, 4 — 0603 на 0,1мкФ 25В и один чип тантал типоразмера A или керамика 1206 на 10мкФ 16В. Так же на плате установлены 2 разъема в виде гребенок PLS2 и PLS10 + 2 перемычки PLS2.
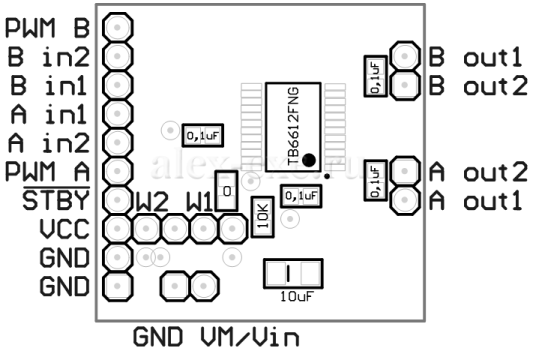
Сборочный чертёж
Перемычка W1 замыкает вход /STBY на землю — переводит драйвер в спящий режим. Перемычка W2 позволяет объединить линию питания цифровой части драйвера (VCC) с линией питания мотора (VM), может применять при работе с маломощными моторчиками до 5В.
Выводы:
| /STBY | Спящий режим (на плате подтянут к VCC) |
| PWM A | ШИМ мотор A |
| A in1, A in2 | Входы управлением мотора A |
| A out1, A out2 | Выходы на мотор A |
| PWM B | ШИМ мотор B |
| B in1, B in2 | Входы управлением мотора B |
| B out1, B out2 | Выходы на мотор B |
| VCC | Питание цифровой части |
| VM | Питание двигателя |
| GND | Земля |
Логика работы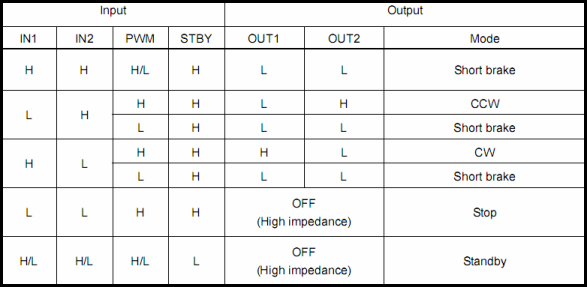
Микросхема была проверена на номинальных напряжениях и нагрузках. Нормально работает до 15В. Во время испытаний нагружался только один канал, в течении длительного периода без дополнительного охлаждения работает на 12В до 0,8-0,9А. При перегрузке микросхема начинает усиленно греться (до 120-160°C) и уходит в защиту по перегреву. В испытаниях применялся блок питания на 3А, более под рукой не было, защита по току не проверена.
Испытание TB6612
Скачать печатную плату
Форматы: PDF, XPS, Gerber, CAM
alex-exe.ru
В рамках проекта «говорящая рыба» на свет родился USB контроллер коллекторных двигателей на известной и распространенной микросхеме драйвере L298 с максимальным током одного канала 2А.
USB драйве моторов на L298N
Об этом забавном проекте, в котором применён этот контроллер, напишу позже, а сейчас речь пойдёт о самом драйвере.
Характеристики:| Напряжение питания | — | 5В |
| Напряжение моторов | — | 5В |
| Максимальный ток мотора | — | 2А |
| Частота ШИМ | — | 133,3Гц |
| Шагов ШИМ | — | 256 |
Драйвер построен на базе микроконтроллера PIC16F688, преобразователя USB-UART cp2102 и микросхеме готового драйвера двигателей L298.
Схема
Всё питается от 5В, следовательно, и на моторы идёт 5В. Моторы с рабочим током до 2А. Гальваническая развязка отсутствует. Плата разрабатывалась под конкретную задачу, об универсальности не задумывался.
Печатка
Детали. Повторюсь: драйвер построен на PIC16F688 в DIP14 корпусе, cp2102 в QFN-28 и L298 в корпусе Multiwatt15. Обвязка преобразователя интерфейса состоит из конденсаторов C1 0,1мкФ 0805 и C2 чип тантала типоразмера A на 4,7мкФ; светодиода LED1 в корпусе 0603, который сигнализирует он подключение к USB шине, и резистор R1 0805 на 470Ом и три перемычки из резисторов по 0Ом типоразмера 1206. У контроллера обвязки побольше: кварц на 20МГц HC-49S с двумя конденсаторами C4 и C5 по 22пФ в корпусах 0805, резистор R4 4,7кОм 0805 и статус светодиод LED2 с резистором на 470Ом в корпусе типоразмера 0805. Конденсатор C6 0,1мкФ 0805, С3 47-100мкФ 16В. У драйвера двигателей на выходах стоят шоттки диоды VD1-VD8 SK24A в корпусе SMA, которые убирают выбросы моторов. Конденсаторы C7-C11 0805 по 0,1мкФ. C12 электролит 220-470мкФ 16В. X1 – гнездо miniUSB, напряжение питания моторов подаётся через штыри PLS3, со стандартной распиновкой для сервоприводов, моторы к плате подключаются через PLS3 с удалённым среднем контактом, так-же на плате предусмотрено два разъёма для подключения сервоприводов (в нижнем левом углу), но они не задействованы.
Управление
За основу прошивки взял робота М2Д, следовательно, управление у USB контроллера такое же, за исключением опроса датчика, которого нет:
Данные передаются пакетами, длиной по 3 байта:
1 стартовый и одновременно команда2 передаваемый параметр/значение3 конечный байт, имеет 13 код или в ASCII – это Enter
Реализованные команды и их значения:
| Команда | Параметр | Описание |
| A | Байт, скорость вращения 0-255 | Мотор 2 вперед |
| a | Мотор 2 назад | |
| D | Мотор 1 вперед | |
| d | Мотор 1 назад | |
| W | Оба мотора вперед | |
| w | Оба мотора назад | |
| S | Байт, не используется | Стоп моторы |
Скачать печатку и прошивку
alex-exe.ru
3 Апр
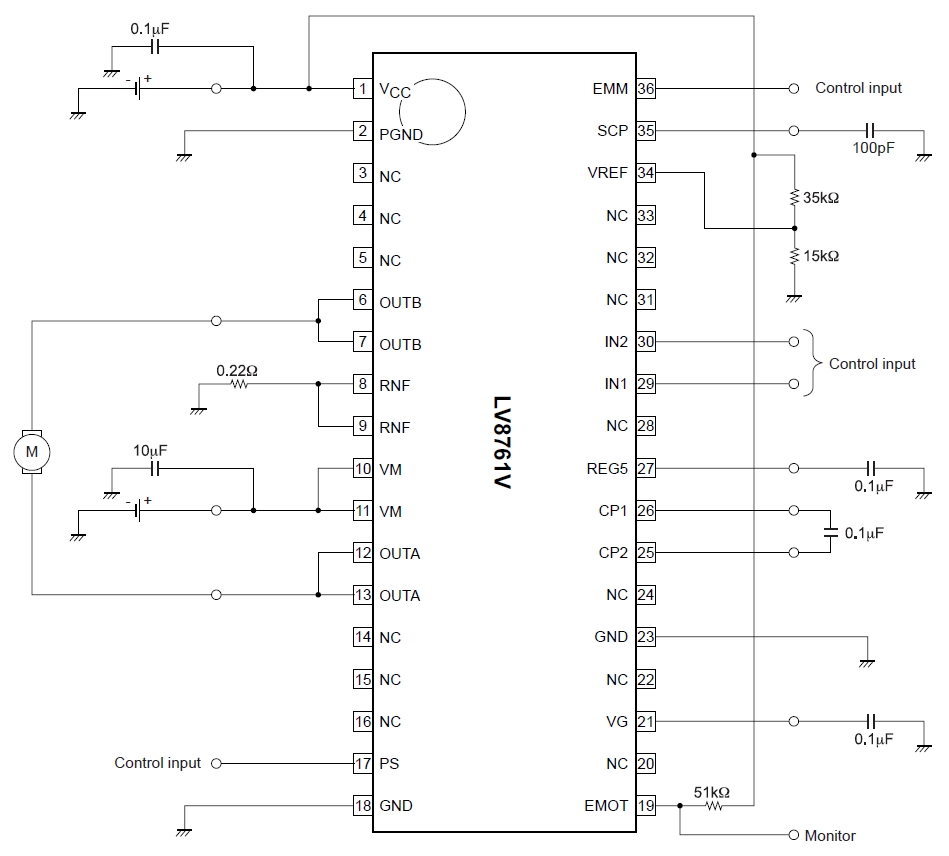 Микросхема LV8761V компании ON Semiconductor представляет собой полный Н–мостовой драйвер коллекторного электродвигателя постоянного тока, реализующий четыре режима работы: вперед, назад, стоп и режим ожидания.
Микросхема LV8761V компании ON Semiconductor представляет собой полный Н–мостовой драйвер коллекторного электродвигателя постоянного тока, реализующий четыре режима работы: вперед, назад, стоп и режим ожидания.
Малое сопротивление интегрированных силовых ключей в открытом состоянии, нулевой ток покоя в режиме ожидания и высокая энергоэффективность делают данное устройство идеальным для применения в системах управления коллекторными двигателями постоянного тока в офисном оборудовании.
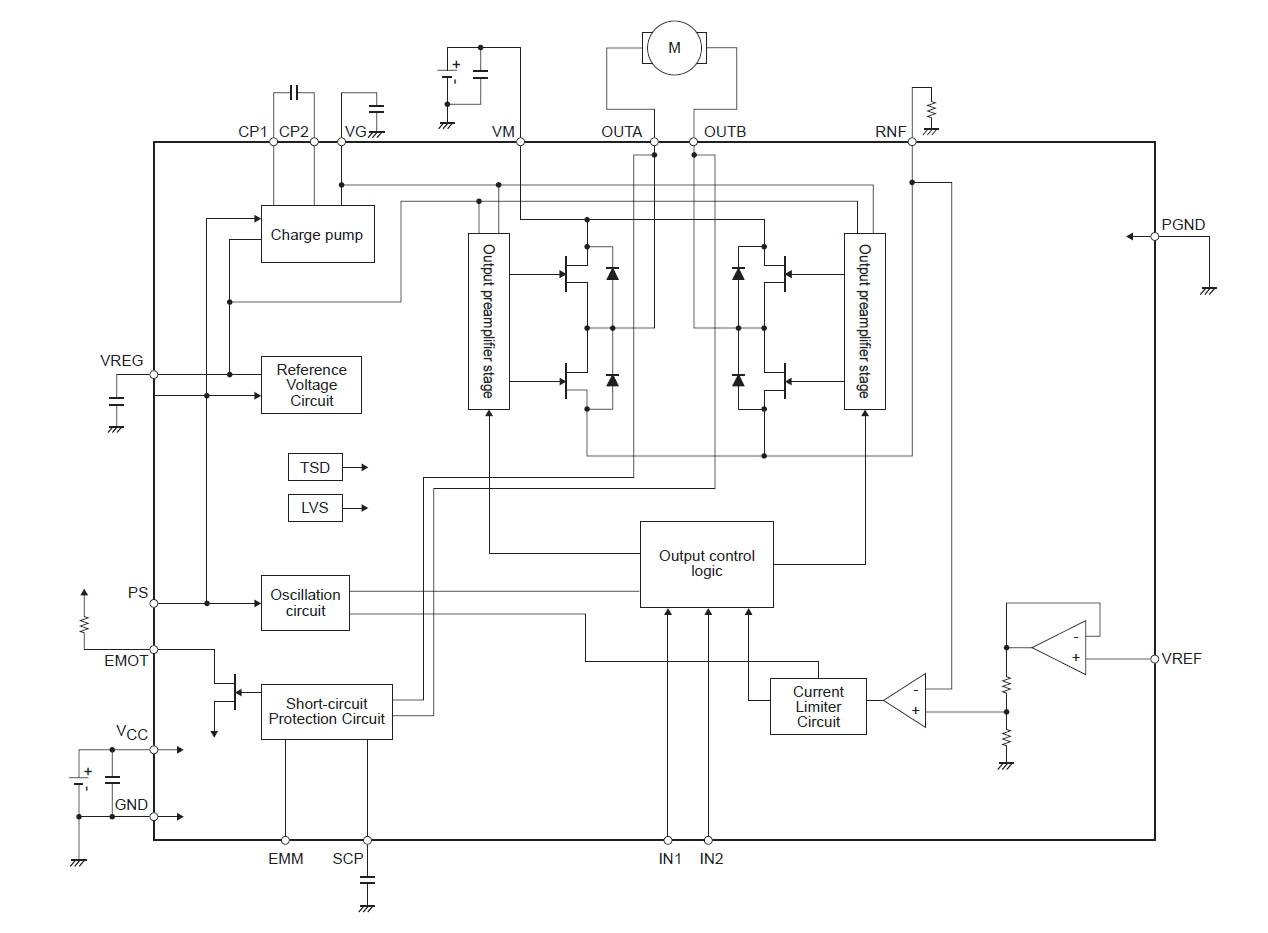 |
| Внутренняя архитектура LV8761V |
Отличительные особенности:
Область применения:
Запросить образцы, средства разработки или техническую поддержку
Документация на LV8761V (англ.)
www.ebvnews.ru
В копилку маломощных драйверов коллекторных двигателей L293, L298, drv8833, H-мост на полевиках, новое пополнение TB6612. Небольшая двухканальная микросхема в корпусе SSOP24 размером 7,6х8,3мм. С напряжением до 15В и током до 1,2А на канал.
Драйвер коллекторного двигателя TB6612
Читать полностью »
Alex_EXE | 27.04.2016 | Робототехника |
Всем, кто хоть немного занимался робототехникой и строил простых колёсных роботов, известны такие микросхемы, как L293, L298 , которые являются драйверами коллекторных моторов током до 300мА и 2А на канал. Микросхемы хорошие и распространённые, только им уже много лет, проще говоря – они уже устарели, вот только замену найти не так то и просто.
Драйвер коллекторного двигателя drv8833
В статье пойдёт речь о миниатюрной микросхеме 2-х канального драйвера двигателей, с максимальным током 1500 мА на канал, которая будет хорошей и достойной заменой L293 и L298.
Читать полностью »
Alex_EXE | 22.05.2014 | Робототехника |
Одним из многообещающих моих проектов был контроллер для колесных и гусеничных роботов различной конфигурации с двумя ведущими моторами малого и среднего тока, основанный на микроконтроллере PIC16F877A. Который по изначальной задумки должен был иметь драйверы двух коллекторных моторов с током до 4А, 5 универсальных аналого-цифровых входов, 8 универсальных цифровых выходов и прочею солянку. Но, к сожалению, на выбранный МК была возложена слишком большая ноша, и в середине работы над ним он перестал с ней справляться.
Робоконтроллер 877A
Но ничего, на ошибках учатся.
Хоть проект с этой реализацией контроллера и не удался, но был извлечен из своих ошибок важный опыт, который ляжет в основу следующей версии контроллера. И что бы этот проект не пропал почём зря, ведь что-то всё-таки реализовать получилось, – решил информацию о нём опубликовать.
Читать полностью »
Alex_EXE | 28.07.2013 | Робототехника |
В рамках проекта «говорящая рыба» на свет родился USB контроллер коллекторных двигателей на известной и распространенной микросхеме драйвере L298 с максимальным током одного канала 2А.
USB драйве моторов на L298N
Об этом забавном проекте, в котором применён этот контроллер, напишу позже, а сейчас речь пойдёт о самом драйвере.
Читать полностью »
Alex_EXE | 23.01.2013 | Робототехника |
Один из самых простых и распространённых вариантов роботов – это колёсные платформы. Но коллекторный мотор просто так напрямую к контроллеру не подключить – нужен управляющий драйвер. В радиотоварах сейчас можно найти готовые микросхемы контроллеров двигателей, это L293 с током до 1А на канал и L298N с током до 2-х ампер. Но что делать, если нужно использовать двигатель с большим рабочим током? Для этой цели было решено изготовить свой драйвер двигателя. Но не сразу городить драйвер для мощных моторов, а для начала поэкспериментировать на малом.
Драйвер коллекторного двигателя
Так появился 4-х амперный драйвер коллекторного двигателя.
Читать полностью »
Alex_EXE | 10.10.2012 | Робототехника |
Прошивка обновлена, точность повышена, теперь 1024 шага.
Часто для тестирования и наладки конструкций на сервоприводах или бесколлекторных моторах нужно знать, как они поведут себя в тех или иных ситуациях. Для этого их нужно подключить к источнику PPM сигнала, но не всегда пульт управления может быть под рукой или устройство управления может ещё быть неготовым, в такой ситуации на выручку приходит сервотестер.
Сервотестер в работе
В статье речь пойдёт о простеньком сервотестере на микроконтроллере PIC16F688/676.
Читать полностью »
Alex_EXE | 25.07.2012 | Робототехника |
Статья принадлежит к серии – колёсная управляемая платформа с элементами BEAM.
Как говорилось ранее основные возможности платы: управление 2-мя двигателями, 2-мя сервоприводами и опрос одного датчика. Но т.к. сейчас нет возможности проверить работу сервоприводов – будет рассмотрен алгоритм без них, т.е. это будет М2Д.
Робот
Читать полностью »
Alex_EXE | 27.04.2012 | Робототехника |
alex-exe.ru