





АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети, будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В
 двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статораЕ1 и ротора Е2 совпадают по фазе. При = 0 ЭДС в роторе не наводится, т.е. равна 0. При > 0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статораЕ1 и ротора Е2 совпадают по фазе. При = 0 ЭДС в роторе не наводится, т.е. равна 0. При > 0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при s < 0 s2 > 0)
 .
.
Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при s < 0 PЭМ < 0  . Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при s < 0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
. Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при s < 0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
 .
.
Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью >0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M = Mc груз будет опускаться с установившейся скоростью c, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов pп = 1 на pп = 2.
б) торможение противовключением
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение s > 1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому, несмотря на то, что ток ротора больше номинального в 7 – 9 раз, т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи (
). Поэтому, несмотря на то, что ток ротора больше номинального в 7 – 9 раз, т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
 ,
,
где Е20 - номинальная ЭДС ротора при s = 1; sн – номинальное скольжение; sн и – скольжение при номинальной нагрузке на искусственной характеристике.
П
 ри спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного
ри спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного  , будет незначительным (см. рис. отрезок
, будет незначительным (см. рис. отрезок  ).
).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети сохраняется лишь незначительный магнитный поток, от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
П оскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
оскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Д ля вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е.Fпост = Fпер. Определение МДС, создаваемой постоянным током Iпост для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
ля вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е.Fпост = Fпер. Определение МДС, создаваемой постоянным током Iпост для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
 . Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:  . Исходя из условия
. Исходя из условия ;
; . Отсюда значение переменного тока, эквивалентного постоянному:
. Отсюда значение переменного тока, эквивалентного постоянному: , а
, а .
.
Необходимые напряжения и мощность постоянного тока

 :
:  .
.
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток, при изменении скольжения, меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора  . Из векторной диаграммы токов следует:
. Из векторной диаграммы токов следует:
 ;
;
 .
.
Возведя в квадрат эти выражения и почленно складывая, получим:  . Намагничивающий ток равен
. Намагничивающий ток равен .
.
В приведенной машине  ,
,
где E2’ – ЭДС ротора при синхронной скорости 0, соответствующей частоте сети. При отличной от 0, ЭДС ротора будет равна:  , где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:
, где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:  , а намагничивающий ток, выраженный черезE2’:
, а намагничивающий ток, выраженный черезE2’:  .
.
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора:  .
.
Учитывая, что  и подставляя значенияI, sin2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:
и подставляя значенияI, sin2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:  .
.
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность:  , гдеm1 – число фаз обмотки статора.
, гдеm1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную  и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:
и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости: , а значение этого момента, также называемого критическим, равно:
, а значение этого момента, также называемого критическим, равно: .
.
М еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и 4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и 4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
г) Торможение с самовозбуждением
Э тот способ торможения иногда применяется в установках с к.з. АД. Суть его заключается в том, что статор двигателя отключается от сети и к его обмоткам подключается батарея конденсаторов. Машина будет работать самовозбужденным асинхронным генератором с отрицательным скольжением по отношению к магнитному полю, созданному в статоре свободными токами низкой частоты. Поэтому на валу двигателя возникает тормозной момент, величина которого тем больше, чем больше начальное значение отрицательного скольжения.
тот способ торможения иногда применяется в установках с к.з. АД. Суть его заключается в том, что статор двигателя отключается от сети и к его обмоткам подключается батарея конденсаторов. Машина будет работать самовозбужденным асинхронным генератором с отрицательным скольжением по отношению к магнитному полю, созданному в статоре свободными токами низкой частоты. Поэтому на валу двигателя возникает тормозной момент, величина которого тем больше, чем больше начальное значение отрицательного скольжения.
Толчок для самовозбуждения создает ЭДС, индуктируемая в обмотках статора потоком остаточного намагничивания вращающегося ротора. При вращении ротора со скоростью (50-100%) от 0поток остаточной индукции наводит в обмотках статора ЭДС порядка 0,5 - 1,5 В.
В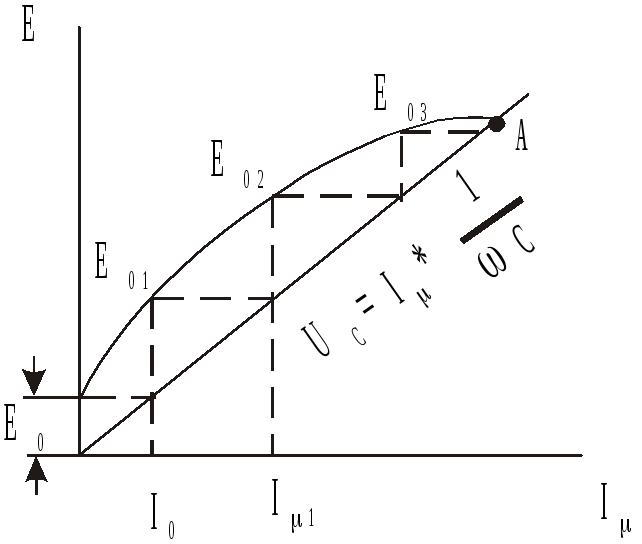 ремя переключения АД с момента отключения от сети и до присоединения емкости составляет 0,05 - 0,1 с. За это время поток ротора не успевает затухнуть окончательно. Поэтому самовозбуждение АД после присоединения емкости развивается за сотые доли секунды. Поскольку конденсаторы в данном случае находятся под напряжением весьма короткое время, оказывается возможным использование конденсаторов с номинальным напряжением, меньшим, чем если бы конденсаторы были подключены «наглухо», т.е. всегда. Да и срок службы их значительно больше, чем при глухо подключенной емкости.
ремя переключения АД с момента отключения от сети и до присоединения емкости составляет 0,05 - 0,1 с. За это время поток ротора не успевает затухнуть окончательно. Поэтому самовозбуждение АД после присоединения емкости развивается за сотые доли секунды. Поскольку конденсаторы в данном случае находятся под напряжением весьма короткое время, оказывается возможным использование конденсаторов с номинальным напряжением, меньшим, чем если бы конденсаторы были подключены «наглухо», т.е. всегда. Да и срок службы их значительно больше, чем при глухо подключенной емкости.
ЭДС от остаточного намачивания Е0, приложенная к конденсаторам, обеспечивает протекание по обмоткам статора емкостного токаI0.
Он создает вращающееся магнитное, которое увеличивает ЭДС и напряжение на статоре. Напряжение на конденсаторах возрастает до величин Е01(см. график). Это вызовет увеличение тока через конденсаторы доIμ1и т.д. Процесс самовозбуждения протекает аналогично процессу самовозбуждения генератора постоянного тока.
Он будет продолжаться до тех пор, пока не наступит равновесие ЭДС генератора и напряжения на зажимах конденсаторов (точка А), т.е. рост тока и ЭДС будет продолжаться до тех пор, пока не наступит насыщение магнитной системы АД. Так же, как и машина постоянного тока асинхронная машина возбуждается лишь при некотором конечном значении скорости, которая зависит от параметров машины и емкости конденсаторов и при выполнении условияωротораω0– угловой скорости поля статора, созданного токами низкой частоты.Следовательно, существует нижняя граница конденсаторного самовозбуждения, которой соответствует р, скольжение s, угловая частота свободных колебаний тока в статоре, которые называются нижними критическими.
Д ля определения скорости ротора, при которой возникает самовозбуждение, воспользуемся упрощенной схемой замещения для начального момента времени после отключения статора от сети и подключения батареи конденсаторов.
ля определения скорости ротора, при которой возникает самовозбуждение, воспользуемся упрощенной схемой замещения для начального момента времени после отключения статора от сети и подключения батареи конденсаторов.
Уравнение равновесия ЭДС в обмотке статора для этого момента времени 
где  - относительная частота тока в статоре.
- относительная частота тока в статоре.
В начале самовозбуждения тока в роторе нет, и весь ток статора является намагничивающим, т.е. I1Iμ. В этом случае написанное выражение будет иметь вид:
 ,
,
где φН -частота начала самовозбуждения в относительных единицах; xμ*φН- индуктивное сопротивление намагничивающего контура при частотен.
Решая данное соотношение относительно нпри пренебрежении малыми величинами, получим:
 или
или  . Т.к.
. Т.к. ;
; ;
;
то  и
и .
.
где ω50– угловая скорость при промышленной частоте 50 Гц.
П ри работе самовозбужденной машины вращающееся поле, созданное током статора, индуктирует в его обмотках ЭДСЕ1, отстающую от этого поля (потока) на
ри работе самовозбужденной машины вращающееся поле, созданное током статора, индуктирует в его обмотках ЭДСЕ1, отстающую от этого поля (потока) на . Этот же поток наводит в обмотке ротора, вращающегося со скоростью, превышающей скорость вращения магнитного потока, ЭДСЕ2, сдвинутую относительноЕ1на 180. Ток статораI1вследствие преобладания емкости, опережаетЕ1на угол1, а ток ротораI2’ из-за наличия индуктивного сопротивления, отстает отЕ2на угол2, что отражено на векторной диаграмме.
. Этот же поток наводит в обмотке ротора, вращающегося со скоростью, превышающей скорость вращения магнитного потока, ЭДСЕ2, сдвинутую относительноЕ1на 180. Ток статораI1вследствие преобладания емкости, опережаетЕ1на угол1, а ток ротораI2’ из-за наличия индуктивного сопротивления, отстает отЕ2на угол2, что отражено на векторной диаграмме.
При повышении скорости вращения ротора, например, при активном Мс, частота будет расти. ВекторI1, вследствие увеличения индуктивного сопротивленияx1*1и уменьшения емкостного сопротивления  , будет поворачиваться по часовой стрелке из положения, совпадающего сI, т.к. в начале самовозбужденияI1=Iμ. Вектор токаI2вследствие увеличения индуктивного сопротивленияx2*с возрастанием частоты также будет поворачиваться по часовой стрелке. Такой характер изменения положения векторов приводит к тому, чтоIμсначала растет, достигает некоторого максимума, а при дальнейшем возрастании скорости ротора приближается к 0. Физически это означает, что вся реактивная мощность, генерируемая конденсаторами «потребляется» индуктивностями рассеяния. Иначе говоря, будет иметь место обмен реактивной энергией между конденсаторами и индуктивными полями рассеяния. При этом основной контур намагничивания в этом обмене энергии участия не принимает, что приводит к прекращению самовозбуждения. Т.о., имеется и верхняя граница существования режима самовозбуждения. Соответствующие ей параметры называются верхними критическими.
, будет поворачиваться по часовой стрелке из положения, совпадающего сI, т.к. в начале самовозбужденияI1=Iμ. Вектор токаI2вследствие увеличения индуктивного сопротивленияx2*с возрастанием частоты также будет поворачиваться по часовой стрелке. Такой характер изменения положения векторов приводит к тому, чтоIμсначала растет, достигает некоторого максимума, а при дальнейшем возрастании скорости ротора приближается к 0. Физически это означает, что вся реактивная мощность, генерируемая конденсаторами «потребляется» индуктивностями рассеяния. Иначе говоря, будет иметь место обмен реактивной энергией между конденсаторами и индуктивными полями рассеяния. При этом основной контур намагничивания в этом обмене энергии участия не принимает, что приводит к прекращению самовозбуждения. Т.о., имеется и верхняя граница существования режима самовозбуждения. Соответствующие ей параметры называются верхними критическими.
При I= 0 ЭДС в обмотках статора и ротора, следовательно, и сумма падений напряжения будут равны 0. Поэтому, пренебрегая активным падением напряжения, можно написать:
 ,
,
где К– относительная частота при исчезновении ЭДС в машине из-за уменьшенияIμдо нулевого значения.
Т.к. при этом I2’=I1, то ,
,
откуда конечная частота, при которой прекращается самовозбуждение и соответствующая ей скорость ротора  ;
;
С учетом активного сопротивления ротора и статора
учетом активного сопротивления ротора и статора
Механические характеристики асинхронной машины в режиме торможения с самовозбуждением для различных значений емкости приведены на рисунке. Максимум тормозного момента при уменьшении емкости перемещается в область более высоких скоростей, причем он может в 5 - 8 раз превышать номинальный момент двигателя.
Недостатком является возникновение тормозного момента только при ω30-50% от0, срыв тормозного момента приωωк , необходимость большой емкости для обеспечения тормозного эффекта при малых скоростях, ограниченность зоны торможения при каждой данной емкости. Эти недостатки могут быть существенно уменьшены при вентильном возбуждении АД, когда он будет работать в режиме автономного самовозбужденного генератора.
studfiles.net
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При =0 ЭДС в роторе не наводится, т.е. равна 0. При >0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).

Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0  Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.

Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Т
 орможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью>0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью c, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
орможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью>0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью c, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов П=1 на П=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (
). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению

Где Е20 - номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
S
 н и – скольжение при номинальной нагрузке на искусственной характеристике.
н и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного  , будет незначительным (см. рис. отрезок
, будет незначительным (см. рис. отрезок  ).
).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
М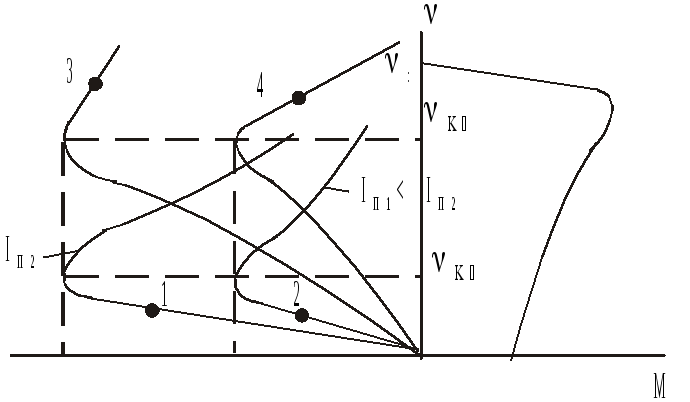 еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
studfiles.net
Асинхронный двигатель может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) в режиме противовключения;
в) в режиме динамического торможения.
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети, будет вращаться со скоростью, близкой к синхронной, потребляя из сети энергию, необходимую для покрытия потерь в стали и обмотках. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а механические и в стали будут покрываться внешней силой.
В двигательном режиме, когда <0, вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При =0 ЭДС в роторе не наводится, т.к. его проводники не пересекаются магнитным полем. При >0 проводники ротора будут пересекаться в противоположном направлении, а статора – в прежнем направлении. ЭДС ротора Е2 меняет свой знак на обратный и машина переходит в генераторный режим с рекуперацией энергии в сеть. Что касается тока, то изменяет свое направление только его активная составляющая, а реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора:

Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно

Т.е. активная мощность меняет направление (отдается в сеть), а из выражения для реактивной мощности Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.

Это значит, что АД как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания вращающегося магнитного поля.

Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью >0, она переходит в генераторный режим и создает тормозной момент. При равенстве M=Mc груз будет спускаться с установившейся скоростью c, как показано на рис. 3.13.1“а”. Для нормального спуска груза Mc не должен превышать MКР в генераторном режиме.
При реактивном Mc кратковременно режим с рекуперацией энергии можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на рис. 3.13.1“б”. Этот режим имеет место на участке ВС после переключения числа пар полюсов с П=1 на П=2.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе f2 больше частоты f1 питающей сети:  . Поэтому несмотря на то, что ток ротора 7 –9 раз больше номинального т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи (
. Поэтому несмотря на то, что ток ротора 7 –9 раз больше номинального т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи ( ), будет невелик, т.е. ток почти чисто индуктивный. Поэтому для увеличения начального тормозного момента АД с фазовым ротором включают большое добавочное сопротивление
), будет невелик, т.е. ток почти чисто индуктивный. Поэтому для увеличения начального тормозного момента АД с фазовым ротором включают большое добавочное сопротивление

Где Е20 – номинальная ЭДС ротора при S=1;
Sн – номинальное скольжение;
Sни – скольжение при номинальной нагрузке на искусственной характеристике.

При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением роторной цепи. Процесс перевода АД из двигательного режима в режим противовключения при тормозном спуске груза показан на рис. 3.13.2“а”.
Для перевода Ад в режим противовключения при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения, что приведет к изменению направления вращения магнитного поля, и одновременно ввести в цепь ротора добавочное сопротивление с целью увеличения начального тормозного момента и уменьшения броска тока. Процесс показан на рис. 3.13.2“б”.
Торможение противовключением к.з. АД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при S близком к 2, из-за большого реактивного сопротивления, равного  , будет небольшим (отрезок СВ' на рис. 3.13.2“б”).
, будет небольшим (отрезок СВ' на рис. 3.13.2“б”).
Рассмотрим теперь динамическое торможение АД.
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС, наводимая этим потоком во вращающемся роторе и ток ротора будут очень малыми. Взаимодействие тока ротора с потоком не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов, или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
Рассмотрим только 1-й случай, поскольку торможение, соответствующее этому случаю, является основным.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наводит в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Поэтому используется одна из схем, приведенных на рис. 3.13.3.

Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Для вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е. Fпост=Fпер. Определить МДС, создаваемую постоянным током, для схемы “а” рис. 3.13.3 можно из векторной диаграммы рис. 3.13.4, в который вектор МДС обмоток статора располагается так, как расположены обмотки статора, по которым протекает постоянный ток Iп.

 .
.
Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора

Приравнивая Fпост и Fпер, исходя из условия  , получим значение переменного тока, эквивалентного постоянному
, получим значение переменного тока, эквивалентного постоянному
 ;
;  , а
, а .
.
Необходимые напряжения и мощность постоянного тока
 ;
;  .
.
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако его работа в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме, в котором намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).

Результирующий намагничивающий ток, приведенный к числу витков обмотки статора

Из векторной диаграммы токов (рис. 3.13.5) следует:


Возведя в квадрат, правые и левые точки этих уравнений и почленно складывая, получим:

Намагничивающий ток равен  .
.
В приведенной машине  , гдеE2’ – ЭДС ротора при синхронной скорости 0, соответствующей частоте сети. При , отличной от 0, ЭДС ротора будет равна:
, гдеE2’ – ЭДС ротора при синхронной скорости 0, соответствующей частоте сети. При , отличной от 0, ЭДС ротора будет равна:  , где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:
, где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:  , а намагничивающий ток, выраженный черезE2’:
, а намагничивающий ток, выраженный черезE2’:
 .
.
Полное сопротивление ротора с учетом того, что  изменяется с изменением скорости вращения ротора:
изменяется с изменением скорости вращения ротора:
 .
.
Учитывая, что  и подставляя значенияZ2’, I, sin2 в уравнение для тока I12, находим
и подставляя значенияZ2’, I, sin2 в уравнение для тока I12, находим

Электромагнитный момент
 , где m1 – число фаз статора.
, где m1 – число фаз статора.
Из этого выражения видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную  и приравняв ее к 0, найдем, что момент будет максимален при критической относительной скорости:
и приравняв ее к 0, найдем, что момент будет максимален при критической относительной скорости: , а значение этого момента, также называемого критическим, равно:
, а значение этого момента, также называемого критическим, равно:
 .
.
Видно, что Мкр в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Семейство механических характеристик соответствующих различным значениям постоянного тока и различном сопротивлениям роторной цепи изображено на рис. 3.13.6.

Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и 4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Разделив значение М на значение МКР, уравнению механической характеристики можно представить в виде:

studfiles.net
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети, будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В
 двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статораЕ1 и ротора Е2 совпадают по фазе. При = 0 ЭДС в роторе не наводится, т.е. равна 0. При > 0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статораЕ1 и ротора Е2 совпадают по фазе. При = 0 ЭДС в роторе не наводится, т.е. равна 0. При > 0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при s < 0 s2 > 0)
 .
.
Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при s < 0 PЭМ < 0  . Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при s < 0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
. Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при s < 0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
 .
.
Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью >0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M = Mc груз будет опускаться с установившейся скоростью c, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов pп = 1 на pп = 2.
б) торможение противовключением
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение s > 1, а частота тока в роторе больше частоты питающей сети ( ). Поэтому, несмотря на то, что ток ротора больше номинального в 7 – 9 раз, т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи (
). Поэтому, несмотря на то, что ток ротора больше номинального в 7 – 9 раз, т.е. больше пускового тока, момент вследствие большой частоты тока, следовательно, большого индуктивного сопротивления роторной цепи ( ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
 ,
,
где Е20 - номинальная ЭДС ротора при s = 1; sн – номинальное скольжение; sн и – скольжение при номинальной нагрузке на искусственной характеристике.
П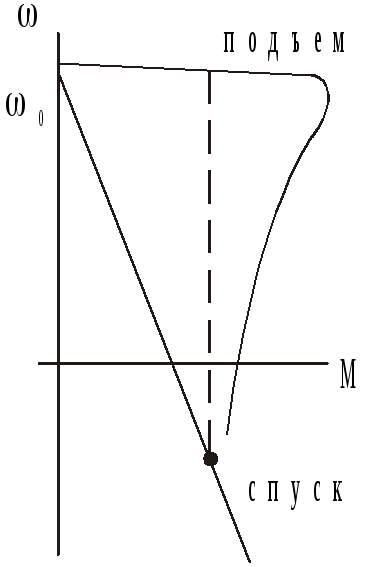
 ри спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного
ри спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного  , будет незначительным (см. рис. отрезок
, будет незначительным (см. рис. отрезок  ).
).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети сохраняется лишь незначительный магнитный поток, от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
П оскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
оскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
Д ля вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е.Fпост = Fпер. Определение МДС, создаваемой постоянным током Iпост для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
ля вывода уравнения механической характеристики АД в режиме динамического торможения режим синхронного генератора, в который превращается АД после подключения к источнику постоянного тока, целесообразно заменить эквивалентным режимом АД, полагая, что его статор вместо постоянного питается переменным током. При такой замене МДС создается совместно обмотками статора и ротора и должно быть соблюдено равенство МДС для обоих случаев, т.е.Fпост = Fпер. Определение МДС, создаваемой постоянным током Iпост для схемы “а”, поясняет рис. и векторная диаграмма, изображенные рядом.
 . Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:  . Исходя из условия
. Исходя из условия ;
; . Отсюда значение переменного тока, эквивалентного постоянному:
. Отсюда значение переменного тока, эквивалентного постоянному: , а
, а .
.
Необходимые напряжения и мощность постоянного тока

 :
:  .
.
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток, при изменении скольжения, меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора  . Из векторной диаграммы токов следует:
. Из векторной диаграммы токов следует:
 ;
;
 .
.
Возведя в квадрат эти выражения и почленно складывая, получим:  . Намагничивающий ток равен
. Намагничивающий ток равен .
.
В приведенной машине  ,
,
где E2’ – ЭДС ротора при синхронной скорости 0, соответствующей частоте сети. При отличной от 0, ЭДС ротора будет равна:  , где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:
, где - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:  , а намагничивающий ток, выраженный черезE2’:
, а намагничивающий ток, выраженный черезE2’:  .
.
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора:  .
.
Учитывая, что  и подставляя значенияI, sin2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:
и подставляя значенияI, sin2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:  .
.
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность:  , гдеm1 – число фаз обмотки статора.
, гдеm1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную  и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:
и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости: , а значение этого момента, также называемого критическим, равно:
, а значение этого момента, также называемого критическим, равно: .
.
М еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и 4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
еханические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и 4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
г) Торможение с самовозбуждением
Э тот способ торможения иногда применяется в установках с к.з. АД. Суть его заключается в том, что статор двигателя отключается от сети и к его обмоткам подключается батарея конденсаторов. Машина будет работать самовозбужденным асинхронным генератором с отрицательным скольжением по отношению к магнитному полю, созданному в статоре свободными токами низкой частоты. Поэтому на валу двигателя возникает тормозной момент, величина которого тем больше, чем больше начальное значение отрицательного скольжения.
тот способ торможения иногда применяется в установках с к.з. АД. Суть его заключается в том, что статор двигателя отключается от сети и к его обмоткам подключается батарея конденсаторов. Машина будет работать самовозбужденным асинхронным генератором с отрицательным скольжением по отношению к магнитному полю, созданному в статоре свободными токами низкой частоты. Поэтому на валу двигателя возникает тормозной момент, величина которого тем больше, чем больше начальное значение отрицательного скольжения.
Толчок для самовозбуждения создает ЭДС, индуктируемая в обмотках статора потоком остаточного намагничивания вращающегося ротора. При вращении ротора со скоростью (50-100%) от 0поток остаточной индукции наводит в обмотках статора ЭДС порядка 0,5 - 1,5 В.
В ремя переключения АД с момента отключения от сети и до присоединения емкости составляет 0,05 - 0,1 с. За это время поток ротора не успевает затухнуть окончательно. Поэтому самовозбуждение АД после присоединения емкости развивается за сотые доли секунды. Поскольку конденсаторы в данном случае находятся под напряжением весьма короткое время, оказывается возможным использование конденсаторов с номинальным напряжением, меньшим, чем если бы конденсаторы были подключены «наглухо», т.е. всегда. Да и срок службы их значительно больше, чем при глухо подключенной емкости.
ремя переключения АД с момента отключения от сети и до присоединения емкости составляет 0,05 - 0,1 с. За это время поток ротора не успевает затухнуть окончательно. Поэтому самовозбуждение АД после присоединения емкости развивается за сотые доли секунды. Поскольку конденсаторы в данном случае находятся под напряжением весьма короткое время, оказывается возможным использование конденсаторов с номинальным напряжением, меньшим, чем если бы конденсаторы были подключены «наглухо», т.е. всегда. Да и срок службы их значительно больше, чем при глухо подключенной емкости.
ЭДС от остаточного намачивания Е0, приложенная к конденсаторам, обеспечивает протекание по обмоткам статора емкостного токаI0.
Он создает вращающееся магнитное, которое увеличивает ЭДС и напряжение на статоре. Напряжение на конденсаторах возрастает до величин Е01(см. график). Это вызовет увеличение тока через конденсаторы доIμ1и т.д. Процесс самовозбуждения протекает аналогично процессу самовозбуждения генератора постоянного тока.
Он будет продолжаться до тех пор, пока не наступит равновесие ЭДС генератора и напряжения на зажимах конденсаторов (точка А), т.е. рост тока и ЭДС будет продолжаться до тех пор, пока не наступит насыщение магнитной системы АД. Так же, как и машина постоянного тока асинхронная машина возбуждается лишь при некотором конечном значении скорости, которая зависит от параметров машины и емкости конденсаторов и при выполнении условияωротораω0– угловой скорости поля статора, созданного токами низкой частоты.Следовательно, существует нижняя граница конденсаторного самовозбуждения, которой соответствует р, скольжение s, угловая частота свободных колебаний тока в статоре, которые называются нижними критическими.
Д ля определения скорости ротора, при которой возникает самовозбуждение, воспользуемся упрощенной схемой замещения для начального момента времени после отключения статора от сети и подключения батареи конденсаторов.
ля определения скорости ротора, при которой возникает самовозбуждение, воспользуемся упрощенной схемой замещения для начального момента времени после отключения статора от сети и подключения батареи конденсаторов.
Уравнение равновесия ЭДС в обмотке статора для этого момента времени 
где  - относительная частота тока в статоре.
- относительная частота тока в статоре.
В начале самовозбуждения тока в роторе нет, и весь ток статора является намагничивающим, т.е. I1Iμ. В этом случае написанное выражение будет иметь вид:
 ,
,
где φН -частота начала самовозбуждения в относительных единицах; xμ*φН- индуктивное сопротивление намагничивающего контура при частотен.
Решая данное соотношение относительно нпри пренебрежении малыми величинами, получим:
 или
или  . Т.к.
. Т.к. ;
; ;
;
то  и
и .
.
где ω50– угловая скорость при промышленной частоте 50 Гц.
П ри работе самовозбужденной машины вращающееся поле, созданное током статора, индуктирует в его обмотках ЭДСЕ1, отстающую от этого поля (потока) на
ри работе самовозбужденной машины вращающееся поле, созданное током статора, индуктирует в его обмотках ЭДСЕ1, отстающую от этого поля (потока) на . Этот же поток наводит в обмотке ротора, вращающегося со скоростью, превышающей скорость вращения магнитного потока, ЭДСЕ2, сдвинутую относительноЕ1на 180. Ток статораI1вследствие преобладания емкости, опережаетЕ1на угол1, а ток ротораI2’ из-за наличия индуктивного сопротивления, отстает отЕ2на угол2, что отражено на векторной диаграмме.
. Этот же поток наводит в обмотке ротора, вращающегося со скоростью, превышающей скорость вращения магнитного потока, ЭДСЕ2, сдвинутую относительноЕ1на 180. Ток статораI1вследствие преобладания емкости, опережаетЕ1на угол1, а ток ротораI2’ из-за наличия индуктивного сопротивления, отстает отЕ2на угол2, что отражено на векторной диаграмме.
При повышении скорости вращения ротора, например, при активном Мс, частота будет расти. ВекторI1, вследствие увеличения индуктивного сопротивленияx1*1и уменьшения емкостного сопротивления  , будет поворачиваться по часовой стрелке из положения, совпадающего сI, т.к. в начале самовозбужденияI1=Iμ. Вектор токаI2вследствие увеличения индуктивного сопротивленияx2*с возрастанием частоты также будет поворачиваться по часовой стрелке. Такой характер изменения положения векторов приводит к тому, чтоIμсначала растет, достигает некоторого максимума, а при дальнейшем возрастании скорости ротора приближается к 0. Физически это означает, что вся реактивная мощность, генерируемая конденсаторами «потребляется» индуктивностями рассеяния. Иначе говоря, будет иметь место обмен реактивной энергией между конденсаторами и индуктивными полями рассеяния. При этом основной контур намагничивания в этом обмене энергии участия не принимает, что приводит к прекращению самовозбуждения. Т.о., имеется и верхняя граница существования режима самовозбуждения. Соответствующие ей параметры называются верхними критическими.
, будет поворачиваться по часовой стрелке из положения, совпадающего сI, т.к. в начале самовозбужденияI1=Iμ. Вектор токаI2вследствие увеличения индуктивного сопротивленияx2*с возрастанием частоты также будет поворачиваться по часовой стрелке. Такой характер изменения положения векторов приводит к тому, чтоIμсначала растет, достигает некоторого максимума, а при дальнейшем возрастании скорости ротора приближается к 0. Физически это означает, что вся реактивная мощность, генерируемая конденсаторами «потребляется» индуктивностями рассеяния. Иначе говоря, будет иметь место обмен реактивной энергией между конденсаторами и индуктивными полями рассеяния. При этом основной контур намагничивания в этом обмене энергии участия не принимает, что приводит к прекращению самовозбуждения. Т.о., имеется и верхняя граница существования режима самовозбуждения. Соответствующие ей параметры называются верхними критическими.
При I= 0 ЭДС в обмотках статора и ротора, следовательно, и сумма падений напряжения будут равны 0. Поэтому, пренебрегая активным падением напряжения, можно написать:
 ,
,
где К– относительная частота при исчезновении ЭДС в машине из-за уменьшенияIμдо нулевого значения.
Т.к. при этом I2’=I1, то ,
,
откуда конечная частота, при которой прекращается самовозбуждение и соответствующая ей скорость ротора  ;
;
С учетом активного сопротивления ротора и статора
учетом активного сопротивления ротора и статора
Механические характеристики асинхронной машины в режиме торможения с самовозбуждением для различных значений емкости приведены на рисунке. Максимум тормозного момента при уменьшении емкости перемещается в область более высоких скоростей, причем он может в 5 - 8 раз превышать номинальный момент двигателя.
Недостатком является возникновение тормозного момента только при ω30-50% от0, срыв тормозного момента приωωк , необходимость большой емкости для обеспечения тормозного эффекта при малых скоростях, ограниченность зоны торможения при каждой данной емкости. Эти недостатки могут быть существенно уменьшены при вентильном возбуждении АД, когда он будет работать в режиме автономного самовозбужденного генератора.
studfiles.net
Асинхронный двигатель может работать в трех тормозных режимах: рекуперативного торможения, противовключения и динамического торможения.
Рекуперативное торможение возникает при вращении ротора в направлении магнитного поля со скоростью w выше синхронной w0. В этому скольжение
 .
.
Комплекс тока ротора в двигательном режиме (s>0):
 (3.309)
(3.309)
В режиме рекуперативного торможения s<0 ,что приводит к изменению знака только активной составляющей  тока ротора, в то время как реактивная составляющая
тока ротора, в то время как реактивная составляющая  сохраняет свой знак. Это свидетельствует о том, что магнитное поле АД в режиме рекуперативного торможения, как и в двигательном режиме, создается реактивным током, поступающим из сети. Рекуперативное торможение применяется в асинхронных электроприводах при тормозных спусках грузов (рис.3.72) и в многоскоростных асинхронных двигателях при снижении скорости путем переключения числа пар полюсов (рис.3.73)
сохраняет свой знак. Это свидетельствует о том, что магнитное поле АД в режиме рекуперативного торможения, как и в двигательном режиме, создается реактивным током, поступающим из сети. Рекуперативное торможение применяется в асинхронных электроприводах при тормозных спусках грузов (рис.3.72) и в многоскоростных асинхронных двигателях при снижении скорости путем переключения числа пар полюсов (рис.3.73)
Торможение противовключением применяется для остановки двигателей в реверсивных электроприводах и для получения посадочных скоростей при опускании тяжелых грузов.
Режим противовключения возникает тогда, когда ротор двигателя под действием внешних сил или сил инерции вращается в сторону, противоположную вращению магнитного поля. Режим противовключения является первой фазой реверса двигателя (рис.3.74). Так как в режиме противовключения направление вращения ротора и магнитного поля АД взаимно противоположны, т.е. w0>0, а w<0, то скольжение
 .
.
и начальный ток Iнач превышает пусковой Iп. При большом токе тормозной момент меньше пускового Mп, так как индуктивное сопротивление ротора пропорционально скольжению, а скольжение больше единицы. Поэтому для уменьшения тока и увеличения тормозного момента в цепь ротора АД с фазным ротором включают добавочное сопротивление. При активном статическом моменте на валу АД с фазным ротором режим противовключения можно получить введением добавочного сопротивления R2g (рис.3.75). Скольжение АД на участке СD механической характеристики больше единицы, что указывает на режим противовключения, установившийся режим которого соответствует точке D
Режим динамического торможения АД с независимым возбуждением уже рассмотрен впереди. Поэтому рассмотрим режим динамического торможения с самовозбуждением, или конденсаторное торможение. Для самовозбуждения АД в цепь статора включают конденсаторы (рис.3.76). Ротор имеет остаточное намагничивание, поэтому в статоре возникает небольшая ЭДС E0, которая вызывает протекание емкостного тока I0. Этот ток, в свою очередь, увеличивает ЭДС до E01 и т.д. Возникает процесс самовозбуждения, как в машине постоянного тока. Для процесса самовозбуждения необходимо, чтобы
 .
.
Процессы конденсаторного торможения можно анализировать, используя эквивалентную схему рис.3.77. С целью выявления основных свойств и соотношений при конденсаторном торможении в начале самовозбуждения не будем учитывать вторичный контур (  ), активное и индуктивное сопротивление статора (R1=0, X1=0), тогда получаем
), активное и индуктивное сопротивление статора (R1=0, X1=0), тогда получаем
 , (3.310)
, (3.310)
и так как  , то
, то
 (3.311)
(3.311)
Эти сопротивления являются функциями частоты, а следовательно, и скорости АД:
 , (3.312)
, (3.312)
 , (3.313)
, (3.313)
где  (3.314)
(3.314)
 – текущая и номинальная синхронные скорости.
– текущая и номинальная синхронные скорости.
Определяем начальную частоту aнач, обеспечивающую выполнение условия (3.311):
 ,
,
откуда  , (3.315)
, (3.315)
где  (3.316)
(3.316)
 (3.317)
(3.317)
 (3.318)
(3.318)
Из (3.315) видно, что
 , (3.319)
, (3.319)
где  - собственная частота колебательного контура, образованного
- собственная частота колебательного контура, образованного  и С.
и С.
Учитывая, что в начале самовозбуждения было принято s=0 , находим начальную скорость ротора, при которой произойдет самовозбуждение:
 , (3.320)
, (3.320)
где pП – число пар полюсов АД.
При скорости ротора  растут частота, напряжение и токи АД. Двигатель работает в генераторном режиме. Энергия, поступающая с вала двигателя, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях цепи ротора. Увеличение скорости приводит сначала к возрастанию намагничивающего тока, а следовательно, и ЭДС E1. Но одновременно растет частота, увеличивается индуктивное и уменьшается емкостное сопротивление. Векторы токов
растут частота, напряжение и токи АД. Двигатель работает в генераторном режиме. Энергия, поступающая с вала двигателя, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях цепи ротора. Увеличение скорости приводит сначала к возрастанию намагничивающего тока, а следовательно, и ЭДС E1. Но одновременно растет частота, увеличивается индуктивное и уменьшается емкостное сопротивление. Векторы токов  поворачиваются в противоположные стороны (рис.3.78а) и при некоторой скорости получаем (рис.3.78б)
поворачиваются в противоположные стороны (рис.3.78а) и при некоторой скорости получаем (рис.3.78б)
 (3.321)
(3.321)
Самовозбуждение прекращается, тормозной момент исчезает. Положение векторов токов на рис.3.78б соответствует условию  . Из эквивалентной схемы рис.3.77 следует, что
. Из эквивалентной схемы рис.3.77 следует, что
 (3.322)
(3.322)
 (3.323)
(3.323)
При учете только реактивных сопротивлений (для приближенной оценки) в (3.322) и (3.323) имеем
 , (3.324)
, (3.324)
откуда находим относительную частоту aкон, при которой прекращается самовозбуждение АД:
 . (3.325)
. (3.325)
где  , (3.326)
, (3.326)
 , (3.327)
, (3.327)
Lsk-индуктивность рассеяния контура короткого замыкания.
Из (3.325) получаем
 , (3.328)
, (3.328)
где wс2 – собственная частота колебательного контура, образованного  и С.
и С.
Скорость ротора wкон, соответствующая срыву самовозбуждения,
 (3.329)
(3.329)
Используя (3.322) и (3.323), можно найти, что
 ,
,
что в соответствии с (3.328) и (3.329) дает результат
 (3.330)
(3.330)
В процессе конденсаторного торможения магнитные поток мало изменяется и его величина в 1,5-2 раза превышает номинальное значение. Вид механических характеристик АД при конденсаторном торможении приведена на рис.3.79, где штриховые линии отмечают участки неустойчивой работы. При увеличении емкости конденсаторов зона действия динамического торможения с самовозбуждением смещается в область низких скоростей, при этом максимальные значения моментов уменьшаются.
Если конденсаторы все время подключены к обмотке статора, то при отключении двигателя от электрической сети начинается обмен энергии между емкостью и индуктивностями обмоток машины. Обычно разряд конденсаторов имеет колебательный характер. Появляющиеся при этом в статорной цепи свободные токи создают круговое вращающееся поле, которое вращается с угловой скоростью, меньшей скорости ротора, поэтому АД работает в генераторном режиме. Передаваемая с ротора энергия и возникающий тормозной момент зависят от разности этих скоростей. Энергия, получаемая с ротора, в начале процесса расходуется главным образом на приращение магнитной энергии поля и, если скорость АД поддерживается постоянной тормозной момент достигает максимума при наибольшем приращении энергии, что соответствует наибольшей скорости изменения магнитного потока. Когда магнитный поток достигает установившегося значения, электромагнитный переходный процесс прекращается и тормозной момент уменьшается до значения, соответствующего генераторному режиму, который возникает за счет самовозбуждения, где энергия тратится в основном на потери в меди и стали статора. Максимальный момент в электромагнитном переходном процессе может составлять (2-5)Мном.
В реальных условиях скорость ротора не остается постоянной и переходный процесс превращается в электромеханический. При уменьшении скорости ротора уменьшается скольжение и передаваемая с ротора энергия.
Если скорость ротора резко снижается, в обмотках статора и ротора появляются апериодические составляющие токов, которые создают дополнительные знакопеременные моменты. Эти дополнительные моменты суммируются с основным тормозным моментом, создавая большой величины пиковые моменты.
В асинхронном двигателе используются также методы комбинированного торможения. Одной составляющей комбинированного торможения является магнитное торможение. При магнитном торможении возбуждение генераторного режима осуществляется за счет энергии затухающего магнитного поля АД. Магнитное торможение возникает только в том случае, если статорная цепь замыкается до полного его исчезновения. Особенность этого торможения состоит в том, что нельзя получить установившийся тормозной режим. Снижение скорости продолжается (0,02-0,06) с независимо от мощности и момента инерции электропривода. Поэтому тормозной путь невелик. Для уменьшения пиков тормозного момента в статорную цепь включают дополнительные сопротивления величиной (4-5)R1. Применяют магнитное торможение для повышения эффективности других способов: с начало перед динамическим торможением, перед реверсом. При магнитно-динамическом торможении (рис.3.80) постоянный ток подают в статор после полного затухания магнитного потока и прекращения действия магнитного торможения. В этом случае динамическое торможение начинается при нулевых начальных условиях без возникновения переходных составляющих момента, что обеспечивает плавность и высокую повторяемость процесса торможения.
Магнитно-конденсаторное торможение (рис.3.81) позволяет использовать большой магнитный поток, который сохраняется практически постоянным на всем протяжении конденсаторного торможения и обеспечивает интенсивное торможение на первом этапе. После прекращения действия конденсаторного торможения с помощью контактора T подключаются сопротивления Rg и за счет сохранившейся энергии магнитного поля происходит магнитное торможение.
При конденсаторно-динамическом торможении (рис.3.82) с начала отключением контактора Л осуществляется конденсаторное торможение и, когда оно исчезает при минимальной скорости wнач, подключается контактором Т постоянный ток, что вызывает динамическое торможение (рис.3.83). Заштрихованная площадь на рис.3.83 определяет средний тормозной момент
 ,
,
который больше при комбинированном (конденсаторно-динамическом) торможении, чем при одном виде торможения.
Тормозной режим АД можно получить еще за счет однофазного включения обмоток статора (рис.3.84). Известно, что однофазное пульсирующее магнитное поле может быть разложено на два симметричных поля, которые вращаются в противоположные стороны с синхронной скоростью. Получается как бы два АД, работающих на один вал. Общий момент АД равен алгебраической сумме моментов двух двигателей. При однофазном включении обмоток статора симметричные составляющие прямой и обратной последовательности фазного напряжения будут равны

поэтому критические моменты от прямой и обратной последовательности будут одинаковыми

Результирующий момент на валу двигателя
 (3.331)
(3.331)
Вид результирующей механической характеристики (2.331) зависит от sк, а следовательно, R2. При отсутствии добавочного сопротивления R2д в роторе в пределах скоростей w<w0 тормозной момент не возникает. Если включить в ротор добавочное сопротивление такой величины, чтобы
 , (3.332)
, (3.332)
то при вращении АД в любую сторону возникает тормозной момент (рис.3.85). Наибольший тормозной момент будет при sk=2.
Читайте также:
lektsia.com
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т.е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).

Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0  Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.

Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.

 Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети (  ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (
). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (  ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению

Где Е20 - номинальная ЭДС ротора при S=1
Sн – номинальное скольжение
 Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного , будет незначительным (см. рис. отрезок  ).
).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.

 |
 . Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:
. Амплитуда МДС, создаваемой переменным током I1 при протекании его по обмоткам статора:  . Исходя из условия
. Исходя из условия 
 . Отсюда значение переменного тока, эквивалентного постоянному:
. Отсюда значение переменного тока, эквивалентного постоянному:  , а
, а  . Необходимые напряжения и мощность постоянного тока
. Необходимые напряжения и мощность постоянного тока  :
:  .
.
 Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Определив ток I1, машину в тормозном режиме можно представить как нормальный АД. Однако, работа АМ в режиме динамического торможения существенно отличается от работы в нормальном двигательном режиме. В двигательном режиме намагничивающий ток и магнитный поток при изменении скольжения практически не изменяются. При динамическом торможении магнитный поток при изменении скольжения меняется вследствие непрерывного изменения результирующей МДС, складывающейся из неизменной МДС статора (постоянного тока) и меняющейся МДС ротора (переменного тока переменной частоты).
Результирующий намагничивающий ток, приведенный к числу витков обмотки статора  . Из векторной диаграммы токов следует:
. Из векторной диаграммы токов следует:


Возведя в квадрат Эти выражения и почленно складывая, получим:  .Намагничивающий ток равен
.Намагничивающий ток равен  .
.
В приведенной машине  , где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна:
, где E2’ – ЭДС ротора при синхронной скорости w0, соответствующей частоте сети. При w отличной от w0, ЭДС ротора будет равна:  , где n - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:
, где n - относительная скорость или иначе – скольжение в режиме динамического торможения. При этом уравнение равновесия ЭДС для роторной цепи имеет вид:  , а намагничивающий ток, выраженный через E2’:
, а намагничивающий ток, выраженный через E2’:  .
.
Полное сопротивление ротора с учетом того, что его индуктивное сопротивление изменяется с изменением скорости вращения ротора:  .
.
Учитывая, что  и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:
и подставляя значения Im, siny2 и Z2’ в уравнение для I12, из полученного соотношения находится ток I2’, который будет равен:  .
.
Электромагнитный момент, развиваемый двигателем, выраженный через электромагнитную мощность:  , где m1 – число фаз обмотки статора.
, где m1 – число фаз обмотки статора.
Из выражения для М видно, что момент при динамическом торможении определяется переменным током I1, эквивалентным постоянному, протекающему по обмоткам статора.
Взяв производную  и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:
и приравняв ее к 0, найдем, что момент будет максимален при относительной скорости:  , а значение этого момента, также называемого критическим, равно:
, а значение этого момента, также называемого критическим, равно:  .
.
 Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
Читайте также:
lektsia.com
АД может работать во всех трех тормозных режимах:
а) с рекуперацией энергии в сеть;
б) противовключение;
в) динамическое торможение.
а) Торможение с рекуперацией энергии в сеть .
При отсутствии внешнего статического момента на валу двигатель, подключенный к сети будет вращаться со скоростью, близкой к синхронной. При этом из сети потребляется энергия, необходимая для покрытия потерь. Если за счет внешней силы ротор вращается с синхронной скоростью, то сеть будет покрывать только потери в статоре, а потери в роторе (механические и в стали) будут покрываться внешней силой.
В двигательном режиме, когда вращающееся магнитное поле пересекает проводники обмоток статора и ротора в одинаковом направлении, ЭДС статора Е1 и ротора Е2 совпадают по фазе. При w=w0 ЭДС в роторе не наводится, т.е. равна 0. При w>w0 проводники обмотки статора пересекаются вращающимся полем в прежнем направлении, а проводники ротора – в противоположном.
ЭДС ротора Е2 меняет свой знак на обратный; машина переходит в генераторный режим с рекуперацией энергии. Что касается тока, то изменяет свое направление только его активная составляющая. Реактивная составляющая при отрицательном скольжении сохраняет свое направление. Это видно и из выражения для тока ротора (при S<0 S2>0).

Такие же выводы можно сделать и на основе анализа активной (электромагнитной) и реактивной мощностей. Действительно, из выражения для РЭМ следует, что при S<0 PЭМ>0  Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.
Т.е. активная мощность меняет направление (передается в сеть), а из выражения для Q2 следует, что при S<0 реактивная мощность вторичного контура Q2 сохраняет свой знак независимо от режима работы машины.

Это значит, что асинхронная машина как в двигательном, так и в генераторном режиме потребляет реактивную мощность, необходимую для создания магнитного поля.

 Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Торможение с отдачей энергии в сеть используется в подъемно-транспортных установках, при спуске тяжелых грузов. Под действием груза ротор машины будет вращаться со скоростью w>w0, машина переходит в генераторный режим и начинает создавать тормозной момент. При равенстве M=Mc груз будет опускаться с установившейся скоростью wc, как показано на рисунке. Необходимо иметь в виду, что для обеспечения нормального спуска груза Mc не должен превышать критический момент в генераторном режиме. При реактивном моменте сопротивления кратковременно режим с рекуперацией энергии в сеть можно получить, если АД допускает переключение обмотки статора с одной пары полюсов на другую, как показано на приведенном графике.
Режим с рекуперацией имеет место на участке ВС после переключения обмотки статора с числа пар полюсов rП=1 на rП=2 .
б) торможение противовключением.
В режиме противовключения ротор двигателя вращается в направлении, противоположном действию момента двигателя. Его скольжение S>1, а частота тока в роторе больше частоты питающей сети (  ). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (
). Поэтому несмотря на то, что ток ротора больше номинального в 7 –9 раз, т.е. больше пускового тока, момент в следствие большой частоты тока, следовательно большого индуктивного сопротивления роторной цепи (  ), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению
), будет невелик. Поэтому для увеличения момента и одновременного уменьшения тока в цепь ротора включают большое добавочное сопротивление, величину которого можно подсчитать по выражению

Где Е20 - номинальная ЭДС ротора при S=1
Sн – номинальное скольжение

 Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
Sн и – скольжение при номинальной нагрузке на искусственной характеристике.
При спуске груза в режиме противовключения торможение протекает на прямолинейном участке механической характеристики, жесткость которой определяется активным сопротивлением в цепи ротора. Механическая характеристика АД при тормозном спуске груза в режиме противовключения изображена на рисунке. Для торможения противовключением при реактивном моменте сопротивления необходимо на ходу двигателя изменить порядок следования фаз питающего напряжения и одновременно ввести в цепь ротора добавочное сопротивление с целью ограничения первоначального броска тока и одновременного увеличения тормозного момента. Механическая характеристика в этом случае выглядит так, как показано на рисунке. Торможение противовключением КЗАД при реактивном моменте сопротивления не эффективно, так как начальный тормозной момент при скольжении, близком к 2, из-за большого реактивного сопротивления, равного , будет незначительным (см. рис. отрезок  ).
).
в) динамическое торможение с независимым возбуждением постоянным током
При отключении обмотки статора АД от сети, сохраняется лишь незначительный магнитный поток от остаточного намагничивания стали статора. ЭДС наводимая во вращающемся роторе и ток в роторе будут весьма малыми. Взаимодействие тока ротора с потоком от остаточного намагничивания не может создать сколько-нибудь значительного электромагнитного момента. Поэтому для получения должного тормозного момента необходимо искусственно создать надлежащий магнитный поток статора. Это может быть достигнуто подачей в обмотки статора постоянного тока или подключением к ним конденсаторов или тиристорного преобразователя частоты, обеспечивающего протекание по обмоткам статора емкостного тока, т.е. опережающего тока, создающего эффект емкости. В 1-м случае будет иметь место режим динамического торможения с независимым возбуждением, во 2-м – с самовозбуждением.
При динамическом торможении с независимым возбуждением обмотки статора отключаются от сети трехфазного тока и подключаются к источнику постоянного тока. Этот ток создает неподвижный в пространстве магнитный поток, который при вращении ротора наведет в последнем ЭДС. Под действием ЭДС в обмотках ротора потечет ток, от взаимодействия которого с неподвижным потоком возникает тормозной момент. Двигатель превращается в синхронный генератор с неявновыраженными полюсами, работающий при переменной скорости.
Симметричное включение 3-х обмоток статора в сеть постоянного тока невозможно без их переключений. Обычно используется одна из схем, приведенных на рис.
Поскольку при питании постоянным током обмотки обладают только омическим сопротивлением, для получения нужного значения тока достаточно небольшого по величине напряжения. В качестве источника постоянного тока для двигателей небольшой и средней мощности используются полупроводниковые выпрямители, а для крупных двигателей могут использоваться специальные генераторы постоянного тока низкого напряжения.
 Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Механические характеристики при различном значении постоянного тока и различном сопротивлении роторной цепи изображены на рисунке. Кривые 1 и 2 соответствуют одинаковому значению сопротивления цепи ротора и различным значениям постоянного тока в статоре, а кривые 3 и4 – тем же значениям постоянного тока, но большему сопротивлению цепи ротора.
Из выражения для МК следует, что критический момент двигателя в режиме динамического торможения не зависит от активного сопротивления цепи ротора.
Разделив значение М на значение МК, уравнению механической характеристики можно придать вид:  .
.
cyberpedia.su










