





Асинхронный движок может работать в последующих тормозных режимах: в режиме рекуперативного торможения, противовключения и динамическом.
Рекуперативное торможение асинхронного мотора
Режим рекуперативного торможения осуществляется в этом случае, когда скорость ротора асинхронного мотора превосходит синхронную.
Режим рекуперативного торможения фактически применяется для движков с переключением полюсов и в приводах грузоподъемных машин (подъемники, экскаваторы и т.п.).
При переходе в генераторный режим вследствие конфигурации знака момента меняет символ активная составляющая тока ротора. В данном случае асинхронный движок дает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), нужную для возбуждения. Таковой режим появляется, к примеру, при торможении (переходе) двухскоростного мотора с высочайшей на низкую скорость, как показано на рис. 1 а.

Рис. 1. Торможение асинхронного мотора в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Представим, что в начальном положении движок работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1. При увеличении числа пар полюсов движок перебегает на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Тот же вид торможения может быть реализован в системе преобразователь частоты – движок при останове асинхронного мотора либо при переходе с свойства на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем синхронной скорости ωо = 2πf / p.
В силу механической инерции текущая скорость мотора ω будет изменяться медлительнее чем синхронная скорость ωо, и будет повсевременно превосходить скорость магнитного поля. Из-за этого и появляется режим торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого движок врубается в направлении спуска груза (черта 2 рис. 1 б).
После окончания торможения он будет работать в точке со скоростью –ωуст2. При всем этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является более экономным видом торможения.
Торможение асинхронного электродвигателя противовключением
Перевод асинхронного мотора в режим торможения противовключением может быть выполнен 2-мя способами. Какой-то из них связан с конфигурацией чередования 2-ух фаз питающего электродвигатель напряжения.
Допустим, что движок работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении 2-ух фаз (к примеру, В и С) он перебегает на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то событие, что при противовключении скольжение асинхронного мотора меняется от S = 2 до S = 1.
Ротор при всем этом крутится против направления движения поля и повсевременно замедляется. Когда скорость спадает до нуля, движок должен быть отключен от сети, по другому он может перейти в двигательный режим, при этом ротор его будет крутиться в направлении, оборотном предшествующему.
При торможении противовключением токи в обмотке мотора могут в 7–8 раз превосходить надлежащие номинальные токи. Приметно миниатюризируется коэффициент мощности мотора. О КПД в этом случае гласить не приходится, т.к. и преобразуемая в электронную механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно применяемой энергии в этом случае нет.
Короткозамкнутые движки краткосрочно перегружаются по току. Правда, у их при (S > 1) вследствие явления вытеснения тока приметно растет активное сопротивление ротора. Это приводит к уменьшению и повышению момента.
С целью роста эффективности торможения движков с фазным ротором в цепи их роторов вводят дополнительные сопротивления, что позволяет ограничить токи в обмотках и прирастить момент.
Другой путь торможения противовключением может быть применен при активном нраве момента нагрузки, который создается, к примеру, на валу мотора грузоподъемного механизма.
Допустим, что требуется выполнить спуск груза, обеспечивая его торможение при помощи асинхронного мотора. Для этого движок методом включения в цепь ротора дополнительного резистора (сопротивления) переводится на искусственную характеристику (ровная 3 на рис. 1).
Вследствие превышения моментом нагрузки Мс пускового момента Мп мотора и его активного нрава груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного мотора может изменяться от S = 1 до S = 2.
Динамическое торможение асинхронного мотора
Для динамического торможения обмотки статора движок отключают от сети переменного тока и подключают к источнику неизменного тока, как это показано на рис. 2. Обмотка ротора при всем этом может быть закорочена, либо в ее цепь врубаются дополнительные резисторы с сопротивлением R2д.

Рис. 2. Схема динамического торможения асинхронного мотора (а) и схема включения обмоток статора (б)
Неизменный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и делает относительно статора недвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает возникновение тока в замкнутом контуре обмотки ротора, который делает магнитный поток, также недвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного мотора делает тормозной момент, за счет которого достигается эффект торможения. Движок в данном случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию передвигающихся частей электропривода и рабочей машины в электронную, которая рассеивается в виде тепла в цепи ротора.
На рисунке 2 б показана более всераспространенная схема включения обмоток статора при динамическом торможении. Система возбуждения мотора в этом режиме является несимметричной.
Для проведения анализа работы асинхронного мотора в режиме динамического торможения несимметричную систему возбуждения подменяют симметричной. С этой целью принимается допущение, что статор питается не неизменным током Iп, а неким эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и неизменный ток.
Электромеханическая и механические свойства представлены на рис. 3.

Рис. 3. Электромеханическая и механические свойства асинхронного мотора
Черта размещена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного мотора в режиме динамического торможения. Механические свойства мотора размещены во 2-м квадранте II.
Разные искусственные свойства асинхронного мотора в режиме динамического торможения можно получить, изменяя сопротивление R2д дополнительных резисторов 3 (рис. 2) в цепи ротора либо неизменный ток Iп, подаваемый в обмотки статора.
Варьируя значения R2д и Iп, можно получить хотимый вид механических черт асинхронного мотора в режиме динамического торможения и, тем, подобающую интенсивность торможения асинхронного электропривода.
studfiles.net
Как и в обычных электродвигателях в синхронных машинах помимо пусковых характеристик существуют и тормозные характеристики. Для осуществления нормального тормозного режима синхронного электропривода необходимо выбрать нужный режим электрического торможения машины.
Итак, торможение синхронного электродвигателя может быть осуществлено несколькими способами:
Торможение противовключением применяется довольно редко, так как оно может вызывать значительные толчки тока в сеть, иногда превышающие значение тока при пуске, довольно сильный нагрев пусковой обмотки, следствием чего является довольно низкий cosφ и сравнительно малый тормозной момент. На рисунке ниже показаны схемы:

На рисунке а) показан двигательный режим, на рисунке б) показан режим торможения синхронной машины противовключением.
Режим динамического торможения синхронного электродвигателя от асинхронного отличается тем, что в синхронном электродвигателе статорная обмотка отключается от сети и подключается к тормозным резисторам, на которых гасится энергия, вырабатываемая электрической машиной при торможении. Схема приведена ниже:

При работе в двигательном режиме выключатель QF замкнут. При переходе электродвигателя в режим динамического торможения выключатель QF размыкается, а QF1 замыкается, при этом напряжение с обмотки возбуждения не снимается. В итоге машина переходит в генераторный режим, а энергия, которая вырабатывается при этом, гасится на резисторах R1, R2, R3, создавая тем самым тормозной момент. При таком режиме работы расход электроэнергии значительно ниже, чем при противовключении. Интенсивность замедления зависит от величины сопротивлений R1, R2, R3. Также на интенсивность влияет и параметры источника постоянного тока возбуждения. Если возбудитель находится на валу машины (собственный возбудитель), то время замедления значительно возрастет, так при уменьшения скорости вращения синхронного электродвигателя будет падать ток возбуждения. Если возбудитель питается от другого источника тока, то момент торможения поддерживается постоянным.
Схема показана ниже:

Приведенная схема может реализовывать две схемы торможения – рекуперативное или динамическое. При использовании схемы инвертора позволяющего проводить рекуперацию энергии, оно будет произведено, но такая схема будет немного дороже чем схема с динамическим замедлением (показана пунктиром). Если электропривод имеет частые пуски и остановы, то применять схему с рекуперативным торможением более целесообразно, чем при длительных или кратковременных режимах работы. При выборе схемы питания необходимо произвести технико – экономические расчеты целесообразности применения какой – то из схем.
elenergi.ru
Полная механическая характеристика асинхронного двигателя во всех квадрантах поля М-s, представлена на рис.3.14.
Асинхронный двигатель может работать в трех тормозных режимах: рекуперативного торможения, динамического торможения и торможения противовключением; специфическим тормозным режимом является также конденсаторное торможение.
Рекуперативное генераторное торможение возможно, когда скорость ротора выше скорости вращения электромагнитного поля статора, чему соответствует отрицательное значение скольжения  .
.
Для того, чтобы ротор двигателя перешел синхронную скорость и разогнался до скорости выше синхронной, к его валу должен быть приложен внешний совпадающий со знаком скорости вращающий момент. Это может быть, например, в приводе подъемной лебедки в режиме спуска груза.
Механическая характеристика асинхронного двигателя в режиме рекуперативного торможения идентична (с учетом угловой симметрии) характеристике двигателя в двигательном режиме. Расчет характеристик может производиться по формуле Клосса (3.25). Максимальный момент в режиме рекуперативного торможения несколько выше, чем максимальный момент в двигательном режиме. Для рекуперативного режима
 .
.
Несколько большая величина максимального момента в генераторном режиме объясняется тем, что потери в статоре (на сопротивлении r1) в двигательном режиме уменьшают момент на валу, а в генераторном режиме момент на валу должен быть больше, чтобы покрыть потери в статоре.
Энергетический баланс в режиме рекуперативного генераторного торможения определяется следующим (рис.3.15). Механическая мощность, поступающая на вал двигателя, преобразуется в электромагнитную мощность вращающегося поля Рэм и электрическую мощность, трансформируемую в роторную цепь двигателя. По аналогии с (3.33) получим
 .
.
Электромагнитная мощность, за исключением потерь в статоре, отдается в питающую сеть, а мощность скольжения рассеивается в роторной цепи. Отметим, что в режиме рекуперативного торможения асинхронный двигатель генерирует и отдает в сеть активную мощность, а для создания электромагнитного поля асинхронный двигатель и в режиме генератора должен обмениваться с сетью реактивной мощностью. Поэтому асинхронная машина не может работать автономным генератором при отключении от сети. Возможно, однако, подключение асинхронной машины к конденсаторным батареям, как к источнику реактивной мощности (см. рис.3.19).
Способ динамического торможения характеризуется тем, что статорные обмотки отключаются от сети переменного тока и подключаются к источнику постоянного напряжения (рис.3.16). При питании обмоток статора постоянным током создается неподвижное в пространстве электромагнитное поле, т.е. скорость вращения поля статора  . Скольжение будет равно
. Скольжение будет равно
 ,
,
где:  - номинальная угловая скорость вращения поля статора.
- номинальная угловая скорость вращения поля статора.
Вид механических характеристик (рис.3.17) подобен характеристикам в режиме рекуперативного торможения. Исходной точкой характеристик является начало координат. Регулировать интенсивность динамического торможения можно изменяя величину тока возбуждения Iдт в обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. При этом, однако, нужно учитывать, что при токах  начинает сказываться насыщение магнитной цепи двигателя.
начинает сказываться насыщение магнитной цепи двигателя.
Для асинхронных двигателей с фазным ротором регулирование тормозного момента может производиться также введением дополнительного сопротивления в цепь ротора. Эффект от введения добавочного сопротивления аналогичен тому, которое имеет место при пуске асинхронного двигателя: благодаря улучшению  повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения.
повышается критическое скольжение двигателя и увеличивается тормозной момент при больших скоростях вращения.
Работу асинхронного двигателя в режиме динамического торможения можно рассматривать как работу трехфазного асинхронного двигателя при питании его постоянным током, т.е. током при частоте f1=0. Второе отличие заключается в том, что обмотки статора питаются не от источника напряжения, а от источника тока. Следует также иметь в виду, что в схеме динамического торможения ток Iдт протекает (при соединении обмоток в звезду) не по трем, а по двум фазным обмоткам.
Для расчета характеристик нужно заменить реальный Iдт эквивалентным током Iэкв, который, протекая по трем фазным обмоткам, создает ту же намагничивающую силу, что и ток Iдт.
Для схемы рис.3.16,б – Iэкв=0,816Iдт.
Для схемы рис.3.16,в - Iэкв=0,472Iдт.
С учетом указанных особенностей векторная диаграмма асинхронной машины в режиме динамического торможения (рис.3.18) будет определяться соотношением:
 .
.
Ток намагничивания зависит от тока ротора при постоянном Iэкв. По мере роста скольжения ток намагничивания будет уменьшаться под действием реактивного тока ротора.
Упрощенная формула для приближенного расчета механических характеристик (не учитывающая насыщение двигателя) подобна формуле Клосса для двигательного режима
 .
.
Здесь  ,
,  ,
,
Следует подчеркнуть, что критическое скольжение в режиме динамического торможения существенно меньше критического скольжения в двигательном режиме, т.к.  . Для получения максимального тормозного момента, равного максимальному моменту в двигательном режиме токIэкв должен в 2-4 раза превышать номинальный ток намагничивания I0. Напряжение источника питания постоянного тока будет значительно меньше номинального напряжения и примерно равно
. Для получения максимального тормозного момента, равного максимальному моменту в двигательном режиме токIэкв должен в 2-4 раза превышать номинальный ток намагничивания I0. Напряжение источника питания постоянного тока будет значительно меньше номинального напряжения и примерно равно  .
.
Энергетически в режиме динамического торможения асинхронный двигатель работает как синхронный генератор, нагруженный на сопротивление роторной цепи двигателя. Вся механическая мощность, поступающая на вал двигателя, при торможении преобразуется в электрическую и идет на нагрев сопротивлений роторной цепи.
В озбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис.3.19. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.
озбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины, как это показано на рис.3.19. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя.
Процесс самовозбуждения асинхронного двигателя происходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с., под действием которой возникает намагничивающий ток, протекающий через конденсаторы. При этом увеличивается поток машины, следовательно, наводимая э.д.с. и ток намагничивания. Верхняя и нижняя границы режима самовозбуждения и величина тормозного момента зависят от величины емкости конденсаторов. Данный способ торможения применяется для приводов малой мощности (до 5 кВт), т.к. требует установки конденсаторов значительного объема.
Торможение противовключением может быть в двух случаях:
в первом, когда при работе двигателя необходимо его экстренно остановить, и с этой целью меняют порядок чередования фаз питания обмоток статора двигателя;
во втором, когда электромеханическая система движется в отрицательном направлении под действием спускаемого груза, а двигатель включается в направлении подъема, чтобы ограничить скорость спуска (режим протягивающего груза).
В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше единицы
 .
.
В первом случае (рис.3.20) двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т.1’, и скорость привода быстро снижается под действием тормозного момента Мт и статического момента Мc. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения.
Во втором случае после снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2 на рис.3.20.
Энергетически режим противовключения крайне неблагоприятен. Ток в этом режиме для асинхронных короткозамкнутых двигателей превосходит пусковой, достигая 10-кратного значения. Потери в роторной цепи двигателя складываются из потерь короткого замыкания двигателя и мощности, которая передается на вал двигателя при торможении
 .
.
Для короткозамкнутых двигателей режим противовключения возможен только в течение нескольких секунд. При использовании двигателей с фазным ротором в режиме противовключения обязательно включение в цепь ротора добавочного сопротивления. В этом случае потери энергии остаются такими же значительными, но они выносятся из объема двигателя в роторные сопротивления.
studfiles.net
В частотно-регулируемых электроприводах можно реализовать все три основные способы торможения: рекуперативное, динамическое и противовключением. В силу известных недостатков: большие токи и трехкратные потери энергии по сравнению с динамическим торможением торможение противовключением не применяются в частотно-регулируемых электроприводов является рекуперативное торможение, т.е. частотное торможение с возвратом энергии в питающую сеть и так называемое резистивное (другое название – инверторное) торможение, т.е. частотное торможение с рассеиванием энергии торможения в двигателе, инверторе и дополнительном тормозном резисторе. При малых скоростях применяется также динамическое торможение, когда постоянный ток от преобразователя частоты подается в обмотки статора АД.
По технико-экономическим соображением желательно использовать рекуперативное торможение. Без дополнительных технических средств рекуперативное торможение можно применять только в двух функциональных схемах ПЧ-АД:
1) Циклоконвертор – асинхронный двигатель (система Ц-АД)
2) Управляемый выпрямитель – автономный инвертор тока – асинхронный двигатель (система УВ-АИТ-АД) – рис. 8.39.
Перевод АД из двигательного режима в режим рекуперативного торможения осуществляется с помощью системы управление СУ преобразователем. В циклоконверторе Ц с помощью СУ обеспечивается обмен активной и реактивной энергией между двигателем и сетью. В системе УВ-АИТ-АД направление тока Ia в звене постоянного тока не изменяется, а изменяется только полярность выходного напряжения УВ путем перевода выпрямителя в режим ведомого сетью инвертора (ВИ). Благодаря этому создаются условия рекуперации энергии торможения в питающую сеть. Однако в настоящее время частотно-регулируемые электроприводы по системе Ц-АД и УВ-АИТ-АД применяются в основном в мегаваттном диапазоне мощностей. Основной структурой современных частотно-регулируемых электроприводов является структура: неуправляемый выпрямитель – фильтр – автономный инвертор напряжения с ШИМ – асинхронный двигатель (система НВ-АИН-АД) – рис. 8.40. По такой структуре создаются регулируемые электроприводы в диапазоне мощностей 1÷500 кВт.
В функциональной схеме рис. 8.40 из-за неуправляемого выпрямителя невозможно изменить полярность напряжения в звене постоянного тока. Поэтому в следствии неизменного направления тока и неизменной полярности напряжения невозможна рекуперация энергии торможения в сеть без дополнительных устройств. Для рекуперации энергии встречно-параллельно НВ подключается инвертор ВИ ведомый сетью (рис. 8.41). При торможении активная мощность передается в звено постоянного тока, а затем с помощью ВИ инвертируется в сеть переменного тока. В процессе рекуперации активной энергии ВИ потребляет реактивную энергию, которая зависит от угла управления тиристорами ВИ, что снижает коэффициент мощности электропривода при торможении.
В многодвигательных электроприводах АИН-АД, например, в электроприводах центрифуг применяемых при производстве сахара, ведомый сетью инвертор ВИ ставится один на общее звено постоянного тока (рис. 8.42). Обычно торможение двигателей происходит в разное время, поэтому энергия торможения одного АД идет на выполнение работы другим двигателем. В результате общее потребление энергии ЭП уменьшается.
По такой же функциональной схеме строится асинхронный тяговый электропривод с частотным управлением. Отличие только в том, что сеть переменного тока однофазная.
Второй способ реализации рекуперативного торможения в системах АИН-АД состоит в применении управляемого выпрямителя с ШИМ, аналогично инвертору (рис. 8.43). В этой системе первый преобразователь, УВ-ШИМ, формирует синусоидальную кривую тока потребляемую управляемым выпрямителем, а второй – АИН-ШИМ формирует квазисинусоидальную кривую напряжения для питания АД. Эта система обеспечивает работу АД в четырех квадрантах параметров ω-М.
Рекуперативное торможение применяется в электроприводах работающих в высокодинамичных режимах (краны – 16%, лифты – 11%, подъемники – 11%, центрифуги – 11%). Реализация рекуперативного торможения АД требует дополнительных капитальных затрат, но при этом уменьшаются годовые эксплутационные расходы за счет возврата части энергии торможения в питающую сеть. Выбор того или иного варианта торможения определяется технико-экономическом расчетом. При оценке тормозных режимов учитывают различные способы торможения, применяемые в электроприводах:
1) механическое (свободный выбег, механический тормоз),
2) редкое электрическое, не влияющая на производительность механизма,
3) электрическое с небольшим тормозным моментом, когда энергия торможения рассеивается в двигателе и инверторе,
4) электрическое со значительным тормозным моментом, когда энергия торможения превышает потери энергии в АД и инверторе.
На основании литературных источников известно, что в общем случае рекуперативное торможение оказывается выгодным при мощности двигателя большей 30 кВт. При меньшей мощности используется резистивное (инверторное) торможение, где энергия торможения, превышающая потери энергии в двигателе и инверторе, рассеивается в тормозном сопротивлении, включаемом через коммутируемый транзистор на шины промежуточного звена постоянного тока (рис. 8.44).
При торможении кинетическая энергия, освобождаемая инерционными массами электропривода при снижении скорости, рассеивается в виде потерь в АД, АИН и тормозном сопротивлении Rт:
 (8.277)
(8.277)
где J, ω – момент инерции электропривода и угловая скорость АД,
 ,
,  – потери мощности в АД и АИН,
– потери мощности в АД и АИН,
Iт – ток в тормозном сопротивлении Rт,
Мдин – динамический момент электропривода.
В выражении (8.277) не учтено изменение электрической энергии в конденсаторе С фильтра выпрямителя:
 (8.278)
(8.278)
На основании (8.277) можно рассчитать величину Rт для конкретного электропривода.
С помощью управления тормозным транзистором VT поддерживается заданный уровень напряжения в звене постоянного тока.
Теперь остановимся на причинах по которым структура НВ-АИН-ШИМ-АД стала основной в современном частотно-регулируемом электроприводе. Коэффициент мощности kм входной цепи НВ-АИН определяется выражением
kм=kIcosφ(1)=kI (8.279)
где

 – действующие значения первой гармоники и всего входного тока неуправляемого выпрямителя НВ;
– действующие значения первой гармоники и всего входного тока неуправляемого выпрямителя НВ;
kI – коэффициент несинусоидальности кривой входного тока НВ.
Если не учитывать индуктивности на входе НВ и принять идеально сглаженный выпрямленный ток Id, то для трехфазной мостовой схемы выпрямления имеем следующие соотношения:
 (8.280)
(8.280)
где Ud0, Ud.ном – максимальное и номинальное выпрямленное напряжение;
Id, Pd – ток и мощность цепи выпрямленного тока;
U2 – действующее значение фазного напряжения на входе выпрямителя НВ;
Sтр – полная мощность питающего выпрямитель трансформатора;
Iв,г – действующее значение всех высших гармоник входного тока выпрямителя.
Действующее значение входного тока выпрямителя
 (8.281)
(8.281)
Этот ток можно сравнить с потребляемым АД синусоидальным током с коэффициентом мощности cosj=0,85:
 (8.282)
(8.282)
где Iа – активный ток АД, который соответствует току первой гармоники I1(1), потребляемому трехфазным мостовым выпрямителем. Действующее значение первой гармоники входного тока выпрямителя будет на (3¸4)% больше, чем Iа. Но даже при этом учете видно, что потребляемый АД ток (при cosj=0,85) будет примерно на 8% больше потребляемого выпрямителем тока при той же активной мощности. Следовательно, система электропривода НВ-ШИМ-АИН-АД не требует увеличения сечения проводов по сравнению с прямым подключением к сети АД той же мощности. Связано это с тем, что отсутствие потребления реактивной мощности в неуправляемом выпрямителе перевешивает наличие токов высших гармоник
 (8.283)
(8.283)
в кривой потребляемого выпрямителем тока.
В реальном выпрямителе величина высших гармоник тока меньше из-за влияния индуктивных сопротивлений в цепи переменного тока, которые приводят к тому, что потребляемый из сети ток изменяется не скачком, а плавно. При этом увеличение индуктивности в цепи переменного тока способствует снижению гармонических составляющих тока (при угле коммутации вентилей g<30°).
Искажение кривой питающего напряжения обусловлено несинусоидальным входным током выпрямителя. Степень искажения синусоидальности кривой напряжения будет зависеть от индуктивного сопротивления между рассматриваемой точкой питающей сети и местом установки выпрямителя. По мере приближения к выпрямителю искажение будет возрастать. При совместном использовании одно- и трехфазных выпрямителей уменьшается содержание в сети несинусоидальных токов. Так, при нагрузке однофазного выпрямителя, превышающего в три раза нагрузку трехфазного мостового выпрямителя, происходит компенсация 5-й и 7-й гармоник тока. В общем случае векторное суммирование гармоник тока в первичной сети от разных потребителей происходит стохастически. Современный преобразователь АИН-ШИМ имеет к.п.д. около 98% при частоте переключений (3¸5) кГц для IGBT трехфазного инвертора на 400В. Общий к.п.д. преобразователя частоты составляет (95-97)%, что превышает к. п. д. асинхронных двигателей. Кривые выходного напряжения, тока, магнитного потока АД в системе АИН-ШИМ-АД имеют высокое качество, т.е. малое содержание низкочастотных гармоник. Данная структура преобразователя частоты позволяет с помощью системы управления урегулировать скорость стандартных асинхронных двигателей в диапазоне мощностей (0,1¸1000) кВт без обратной связи по скорости. Потери мощности в АД увеличиваются в среднем на (5¸10)% по сравнению с питанием от синусоидальной сети. Поэтому, если используется независимое охлаждение, можно не завышать габаритную мощность двигателей.
Изложенное, опираясь на оценки специалистов, позволяет сказать, что структура частотно-регулируемого электропривода НВ-АИН-ШИМ-АД совместно со стандартными асинхронными двигателями останется главной и в будущем.
Читайте также:
lektsia.com
При определенных условиях электродвигатель может развивать отрицательный момент, т.е. момент, действующий навстречу вращению электропривода. Такой режим работы двигателя называется тормозным.
Тормозной режим может быть установившимся и переходным. Установившийся режим, торможения возникает при спуске груза движении и т.д. Он может возникнуть только при наличии в приводе положительного активного статического момента. Переходный режим торможения возникает при остановке привода или переходе его с одной установившейся частоты вращения на другую при любом статическом моменте сопротивления и на холостом ходу.
Электродвигатели могут работать в различных тормозных режимах. На практике распространены три способа торможения: рекуперативное, динамическое и противовключением.
Рекуперативное торможение.
Рекуперативное торможение асинхронных двигателей начинается тогда, когда частота вращения ротора под действием внешних сил превысит частоту вращения поля. Скольжение при этом становится отрицательным, и двигатель переходит в режим асинхронного генератора, работающего параллельно с генераторами электростанции.
Рекуперативное торможение отличается высокой экономичностью, поскольку энергия тормозящихся масс превращается в электроэнергию и отдается в сеть. Практически это приводит к тому, что нагрузка на генераторы электростанции уменьшается. Очень важно также, что при переходе из двигательного режима в тормозной и наоборот никаких переключений в схеме управления двигателем не делается. Все зависит от действия внешних сил. Например, при спуске холостого гака или легкого груза двигатель работает в силовом режиме, а при спуске более тяжелого груза он автоматически переходит в тормозной режим при этом же положении поста управления лебедкой или краном.
Если на судне одновременно переходят в режим рекуперативного торможения несколько относительно мощных электродвигателей, они могут полностью разгрузить генератор на электростанции, который в свою очередь перейдет в режим работы двигателя, и защита от обратной мощности (тока) выключит его. Такая ситуация нередко возникает во время грузовых операций, когда лебедки или краны, скажем, двух трюмов спускают груз одновременно, а остальная нагрузка на генератор невелика.
Недостатком рекуперативного торможения является то, что торможение осуществляется только при частоте вращения большей, чем частота вращения идеального холостого хода.
Динамическое торможение.
Режим динамического торможения асинхронных двигателей возникает тогда, когда обмотка статора отключается от сети переменного тока и подключается к сети постоянного тока. При этом постоянный ток, протекающий по обмотке статора, создает неподвижное магнитное поле. Оно индуктирует во вращающемся роторе э. д. с, под действием которой в обмотке ротора потечет ток, а его взаимодействие с неподвижным полем создаст тормозной момент. Кинетическая энергия торможения превращается в электрическую, выделяясь в виде тепла в цепи ротора.
Динамические торможение происходит до полной остановки привода. Однако энергия тормозящихся масс полезно не используется, и в случае перехода от двигательного режима к тормозному должна переключаться схема управления.
Динамическое торможение применяют чаще всего для быстрой и точной остановки электропривода, например в рулевом устройстве, в приводе поворота башни крана.
Торможение противовключением.
Когда двигатель включен на вращение в одну сторону, но под действием внешних сил вращается в другую, происходит торможение противовключением. Этот режим является тяжелым для двигателей переменного тока, так как связан с резким увеличением тока. Здесь не только энергия тормозящихся масс, но и значительная энергия, потребляемая из сети, превращается в тепло на сопротивлениях обмоток двигателя и на реостатах.
Торможение противовключением применяют иногда в случае быстрой остановки привода с последующим реверсом.
Для асинхронных двигателей с фазным ротором применяют однофазное торможение (электропривод брашпиля судов типа «Андижан», «Повенец»), при котором трехфазная обмотка статора включается на две фазы сети, а в цепь ротора вводится реостат большого сопротивления.
studfiles.net
|
Читайте также: ©2015 megaobuchalka.ru Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. | Почему 3458 студентов выбрали МегаОбучалку... Система поиска информации Мобильная версия сайта Удобная навигация Нет шокирующей рекламы |
megaobuchalka.ru
Торможение АД можно осуществить как при питании от сети переменного тока, так и путем включения в цепь статора источника постоянного тока. Кроме того, для подтормаживания Д используют режим самоторможения [9].
При включении АД по основной схеме может быть осуществлено торможение противовключением и рекуперативное торможение.
1. Торможение противовключением.
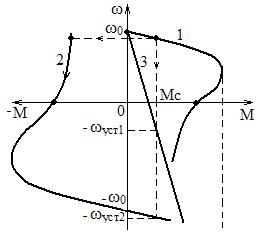
Рис. 5.13. Механические характеристики АД
при торможении противовключением
Этот режим можно осуществить двумя путями:
1) изменяя порядок чередования фаз. В этом случае направление вращения магнитного поля меняется на противоположное и Д с естественной характеристики 1 переходит на тормозную характеристику 2, расположенную во втором квадранте. В момент, когда частота вращения становится близкой к нулю, Д необходимо отключить от сети. В противном случае он реверсируется.
2) нагружая Д активным моментом, при введении в цепь ротора большого добавочного сопротивления. В этом случае вращающий момент нагрузки оказывается больше движущего момента Д. Поскольку они направлены в разные стороны, то Д переходит на работу по характеристике 3, и новое установившееся значение скорости будет соответствовать противоположному направлению вращения Д, то есть имеем спуск груза с подтормаживанием за счет включенного на подъем Д.
 |
Рис. 5.14. Механические характеристики АД
при рекуперативном торможении
Рекуперативное торможение самое экономичное, поскольку Д включается параллельно с сетью и работает в режиме генератора, то есть энергия, затрачиваемая на торможение, возвращается обратно в сеть. Это торможение имеет место тогда, когда частота вращения выше синхронной. На практике этот метод широко используется в многоскоростных Д при переходе с большей скорости на меньшую, а также при уменьшении частоты питающего напряжения в системе преобразователь частоты - двигатель.
3. Динамическое торможение.


Рис. 5.15. Динамическое торможение АД: а) схема включения АД;
б) механические характеристики АД
Для осуществления этого режима обмотку статора отключают от сети и в две фазы статора подают постоянный ток. В результате ротор вращается в неподвижном магнитном поле. При этом цепь ротора может быть закорочена, либо в нее может быть введено  . Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как
. Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как  . Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра
. Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра  . При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
. При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
Этот режим получил большое распространение.
Недостатком этого способа является уменьшение тормозного момента до нуля при снижении скорости до нуля.
4. Торможение АД при самовозбуждении.
Этот вид торможения основан на том, что после отключения АД от сети его электромагнитное поле затухает не мгновенно. Если использовать энергию этого затухающего поля, то можно обеспечить самовозбуждение Д и осуществить тормозной режим. На практике используют два способа торможения с самовозбуждением: конденсаторное и магнитное торможение.
 а) б)
а) б)

Рис. 5.16. Конденсаторное торможение АД: а) схема включения АД;
б) механические характеристики АД
При конденсаторном торможении самовозбуждение осуществляется за счет включения в цепь статора конденсаторов. Причем конденсаторы могут подключаться постоянно (глухое включение) или при помощи контактора. Увеличение емкости конденсаторов приводит к смещению вниз и влево характеристик. При отключении двигателя накопленная в электрическом поле энергия самовозбуждает его, что приводит к появлению тормозного момента.
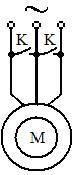
Рис. 5.17. Схема включения АД при магнитном торможении
Магнитное торможение. В настоящее время с использованием тиристорных коммутирующих устройств и тиристорных регуляторов напряжения широкое распространение получило магнитное торможение. Этот способ реализуется при отключении Д от сети и закорачивании обмоток статора контактором  . При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
. При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
Особенностью этого способа является быстротечность, которая определяется небольшим временем затухания магнитного поля. Обычно этот режим осуществляется в сочетании с режимом динамического торможения. Такое комбинированное торможение реализуется с помощью тиристорных пускорегулирующих устройств.

Рис. 5.18. Схема включения АД при комбинированном торможении
При отключении Д от сети тиристоры  закрыты, сигнал подается на
закрыты, сигнал подается на  и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например
и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например  . В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
. В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
poznayka.org
 Рис. 1. Торможение асинхронного двигателя в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Предположим, что в исходном положении двигатель работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1. При увеличении числа пар полюсов двигатель переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове асинхронного двигателя или при переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем самым синхронной скорости ωо = 2πf / p.
В силу механической инерции текущая скорость двигателя ω будет изменяться медленнее чем синхронная скорость ωо, и будет постоянно превышать скорость магнитного поля. За счет этого и возникает режим торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого двигатель включается в направлении спуска груза (характеристика 2 рис. 1 б).
После окончания торможения он будет работать в точке со скоростью –ωуст2. При этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения.
Торможение асинхронного электродвигателя противовключением
Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения.
Допустим, что двигатель работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые двигатели кратковременно перегружаются по току. Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент.
Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, например, на валу двигателя грузоподъемного механизма.
Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 1).
Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Динамическое торможение асинхронного двигателя
Для динамического торможения обмотки статора двигатель отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 2. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением R2д.
Рис. 1. Торможение асинхронного двигателя в основной схеме включения: а) с рекуперацией энергии в сеть; б) противовключением
Предположим, что в исходном положении двигатель работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1. При увеличении числа пар полюсов двигатель переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове асинхронного двигателя или при переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем самым синхронной скорости ωо = 2πf / p.
В силу механической инерции текущая скорость двигателя ω будет изменяться медленнее чем синхронная скорость ωо, и будет постоянно превышать скорость магнитного поля. За счет этого и возникает режим торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого двигатель включается в направлении спуска груза (характеристика 2 рис. 1 б).
После окончания торможения он будет работать в точке со скоростью –ωуст2. При этом осуществляется процесс спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным видом торможения.
Торможение асинхронного электродвигателя противовключением
Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения.
Допустим, что двигатель работает на характеристике 1 (рис. 1 б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не приходится, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Короткозамкнутые двигатели кратковременно перегружаются по току. Правда, у них при (S > 1) вследствие явления вытеснения тока заметно возрастает активное сопротивление ротора. Это приводит к уменьшению и увеличению момента.
С целью увеличения эффективности торможения двигателей с фазным ротором в цепи их роторов вводят добавочные сопротивления, что позволяет ограничить токи в обмотках и увеличить момент.
Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, например, на валу двигателя грузоподъемного механизма.
Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 1).
Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью –ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Динамическое торможение асинхронного двигателя
Для динамического торможения обмотки статора двигатель отключают от сети переменного тока и подключают к источнику постоянного тока, как это показано на рис. 2. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением R2д.
 Рис. 2. Схема динамического торможения асинхронного двигателя (а) и схема включения обмоток статора (б)
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного двигателя создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей электропривода и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
На рисунке 2 б показана наиболее распространенная схема включения обмоток статора при динамическом торможении. Система возбуждения двигателя в этом режиме является несимметричной.
Для проведения анализа работы асинхронного двигателя в режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и постоянный ток.
Электромеханическая и механические характеристики представлены на рис. 3.
Рис. 2. Схема динамического торможения асинхронного двигателя (а) и схема включения обмоток статора (б)
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного двигателя создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей электропривода и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
На рисунке 2 б показана наиболее распространенная схема включения обмоток статора при динамическом торможении. Система возбуждения двигателя в этом режиме является несимметричной.
Для проведения анализа работы асинхронного двигателя в режиме динамического торможения несимметричную систему возбуждения заменяют симметричной. С этой целью принимается допущение, что статор питается не постоянным током Iп, а некоторым эквивалентным трехфазным переменным током, создающим такую же МДС (магнитодвижущую силу), что и постоянный ток.
Электромеханическая и механические характеристики представлены на рис. 3.
 Рис. 3. Электромеханическая и механические характеристики асинхронного двигателя
Характеристика расположена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного двигателя в режиме динамического торможения. Механические характеристики двигателя расположены во втором квадранте II.
Различные искусственные характеристики асинхронного двигателя в режиме динамического торможения можно получить, изменяя сопротивление R2д добавочных резисторов 3 (рис. 2) в цепи ротора или постоянный ток Iп, подаваемый в обмотки статора.
Варьируя значения R2д и Iп, можно получить желаемый вид механических характеристик асинхронного двигателя в режиме динамического торможения и, тем самым, соответствующую интенсивность торможения асинхронного электропривода.
Рис. 3. Электромеханическая и механические характеристики асинхронного двигателя
Характеристика расположена на рисунке в первом квадранте I, где s = ω / ωo – скольжение асинхронного двигателя в режиме динамического торможения. Механические характеристики двигателя расположены во втором квадранте II.
Различные искусственные характеристики асинхронного двигателя в режиме динамического торможения можно получить, изменяя сопротивление R2д добавочных резисторов 3 (рис. 2) в цепи ротора или постоянный ток Iп, подаваемый в обмотки статора.
Варьируя значения R2д и Iп, можно получить желаемый вид механических характеристик асинхронного двигателя в режиме динамического торможения и, тем самым, соответствующую интенсивность торможения асинхронного электропривода.
 Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.










